Permanent Magnet Brushless DC (PMBLDC) motors are machines with excellent torque–speed characteristics, excellent efficiency, and nominal maintenance cost. They are very favorable for unidirectional variable-speed applications such as automotive pumps and fans [
1]. They are also very supportive with respect to achieving compactness in terms of machine size [
2]. They produce a negligible amount of electromagnetic and mechanical noise. They also exhibit excellent durability due to their lack of mechanical contact [
3]. One of the great flaws in the BLDC motor is its torque ripple, which is built into the design [
4]. One of the main reasons for torque ripple is cogging torque. Cogging torque also generates enormous, troubling noise and shaking movements in the machine itself, as well as in its load. For this reason, cogging torque reduction methods play a vital role in PMBLDC motor design. Generally, cogging torque derives from motors using permanent magnets such as Permanent Magnet Brushless DC (PMBLDC) motors and permanent Magnet Synchronous motors. The root cause for the generation of cogging torque in BLDC motors is the magnetic interaction between the permanent magnet and the steel in the slotted armature. A lot of techniques are currently available for the minimization of cogging torque in BLDC motors. Nowadays, BLDC motors are used in rigorous applications such as electric power steering, robotics, etc. Hence the reduction of cogging torque has come to be a grueling task.
Over the last two decades, numerous studies have been conducted on the cogging torque of PMBLDC motors. These methods have included electromagnetic methods and mechanical methods. The authors recommended a core skew structure for reducing the cogging torque in [
5]. When applying this property, no-load THD and the fifth and seventh harmonics were the main harmonic components of the back-EMF. However, when skewing the core, some residual magnetism is lost. Modification of the machine’s magnetic circuit resulted in the occurrence of additional harmonics in the cogging torque in [
6]. They focused on a symmetrical rotor with an asymmetrical stator or an asymmetrical rotor with a symmetrical stator. Nonlinear algorithms were proposed for the reduction of cogging torque in [
7,
8,
9]. A feedback linearization strategy was used in [
7], mathematical modeling of cogging torque phenomena was performed in [
8], and field-oriented control operations were used in [
9]. A new technique for radial flux surface-mounted PMBLDC motors was proposed by applying T-shaped bifurcations in the stator teeth in [
10]. However, this reduced the mechanical strength of the stator. In order to reduce the cogging torque, the slot was closed by a sliding separator in [
11]. For small-sized machines, it is very difficult to place a slider inside the slot. The authors recommended notches in the rotor in [
12]. However, adding notches in the rotor side is a tedious mechanical process. A new technique in the winding side was proposed in [
13]. Coil winding concentrated on the phase group is a good solution for cogging torque reduction, but increases the complexity of the winding. Magnet step skewing and reduction of the claw pole width was carried out in a claw pole machine in [
14]. Magnet step skewing causes a reduction in residual magnetism and the unequal width in the claw pole increases the structural complexity. U-clamped magnetic poles were recommended for the reduction of cogging torque and even flux per pole in [
15], so a machine with a greater number of slots is recommended, as well as a high magnet thickness. In [
16], a novel air gap profile was introduced for a single-phase PMBLDC motor. This air gap profile consists of a dip and a dip angle. By varying the dip and dip angle, a handful of air gap profiles could be generated, and profiles with a dip angle less than the critical dip angle exhibited improved starting torque by up to 70%. In [
17], the reduction of cogging torque and acoustic noise in permanent magnet motors with larger stator slot openings was investigated. Here also, tooth pairings with two different types of tooth width were proposed. The experimental results showed that the proposed tooth pairings reduced cogging torque by 85% and acoustic noise by 3.1 dB. Reference [
1] showed how to minimize high cogging torque without increasing the manufacturing cost. A systematic means was presented by which the selected introduction of auxiliary slots can double the fundamental frequency of the cogging torque, making stator claw skewing much more effective at reducing cogging torque; both measures can feasibly be carried out at the stage of punching the steel sheets and their subsequent deep drawing, at no additional cost. Reference [
18] reported a stator shape optimization design for reducing the cogging torque of single-phase brushless DC (BLDC) motors by adopting an asymmetrical airgap to make them self-start. A model that combined Latin hypercube sampling and a genetic algorithm was used to reduce the cogging torque and maintain the efficiency and torque. As an optimal design result, the cogging torque of the optimal model decreased. Ref. [
19] proposed a new design of SPOKE-type PM brushless direct current (BLDC) motor without using neodymium PM (Nd-PM). The proposed model had an improved output characteristic, as it used the properties of the magnetic flux effect of the SPOKE-type motor with an additional pushing assistant magnet and sub assistant magnet in the shape of a spoke. In this paper, ferrite PM (Fe-PM) was used instead of Nd-PM. The authors of [
20] introduced a genetic algorithm for optimal core shape design for reducing cogging torque in brushless DC motors used in digital versatile disk drive systems or hard disk drive systems. The optimized or rounded core could be a recommended core shape for the outer-rotor-type BLDC motor for a DVD ROM drive system in order to achieve low cogging torque. Ref. [
21] described a novel rotor pole shape consisting of a uniform surface and an eccentric surface, leading to a sinusoidal magnetic flux density in the air gap and reducing cogging torque, torque ripple, and the harmonics of the back-electromotive force waveform in a spoke-type brushless DC motor. This novel rotor included an eccentric surface. The proposed method had a smooth variation of reluctance, producing a near sinusoidal magnetic flux waveform in the air gap. This caused a reduction in the losses between the upper edge of the permanent magnet and the adjacent stator teeth, and an increment of the effective flux by concentrating the flux. Ref. [
22] proposed an anisotropic ferrite magnet shape and magnetization direction to maximize back-EMF in an IPM BLDC motor. Firstly, four different models of general magnet shapes were selected, and then FEM analysis was carried out using four different magnetization directions for each of the four models. The best magnet shape and magnetization direction for each model was used to determine an initial model for optimization. Secondly, based on the initial model, optimization design for maximum back-EMF and minimum cogging torque and THD was performed. Reference [
23] presented the stator and rotor shape designs for an interior-permanent magnet (IPM)-type brushless DC (BLDC) motor for reducing torque fluctuation. A partly enlarged air gap is introduced by the unequal diameter of the rotor and core structure of the stator with pole shoe modification. A reduction in torque ripple was obtained by upgrading the torque value at the minimum torque position, and their detail characteristics were compared. The addition of holes in the rotor core is a better solution for overcoming this problem. The additional torque fluctuation was decreased.
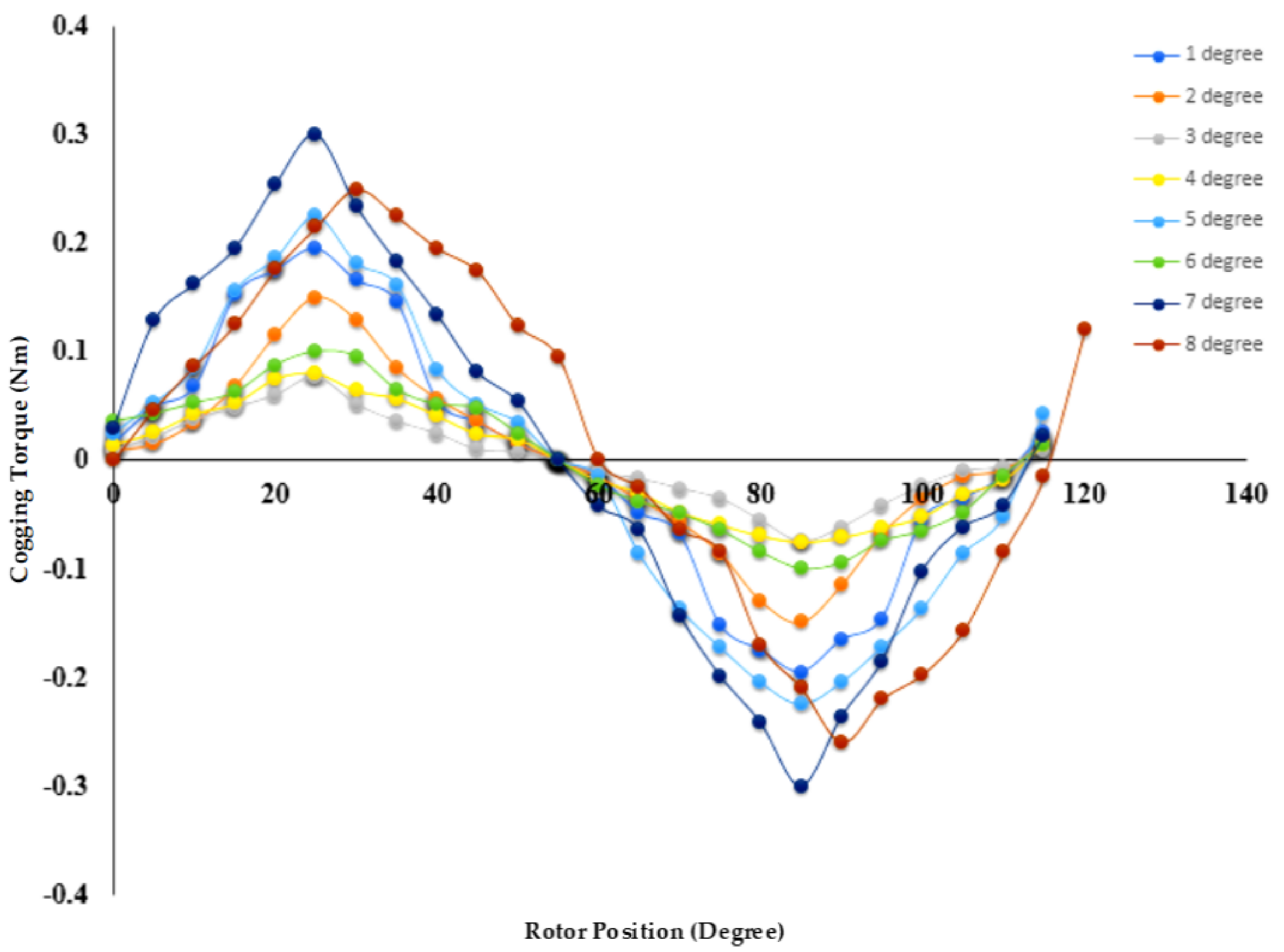
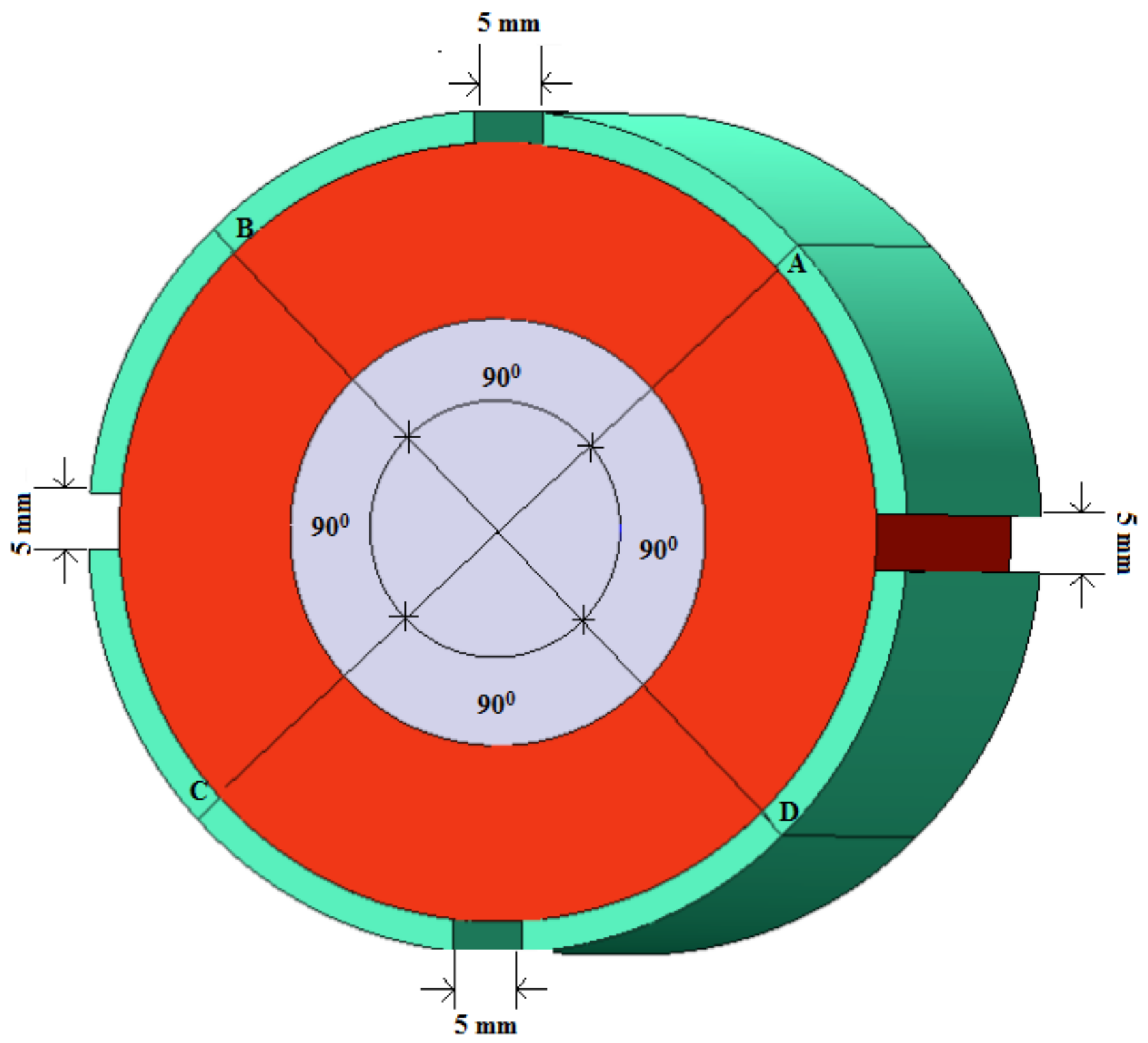
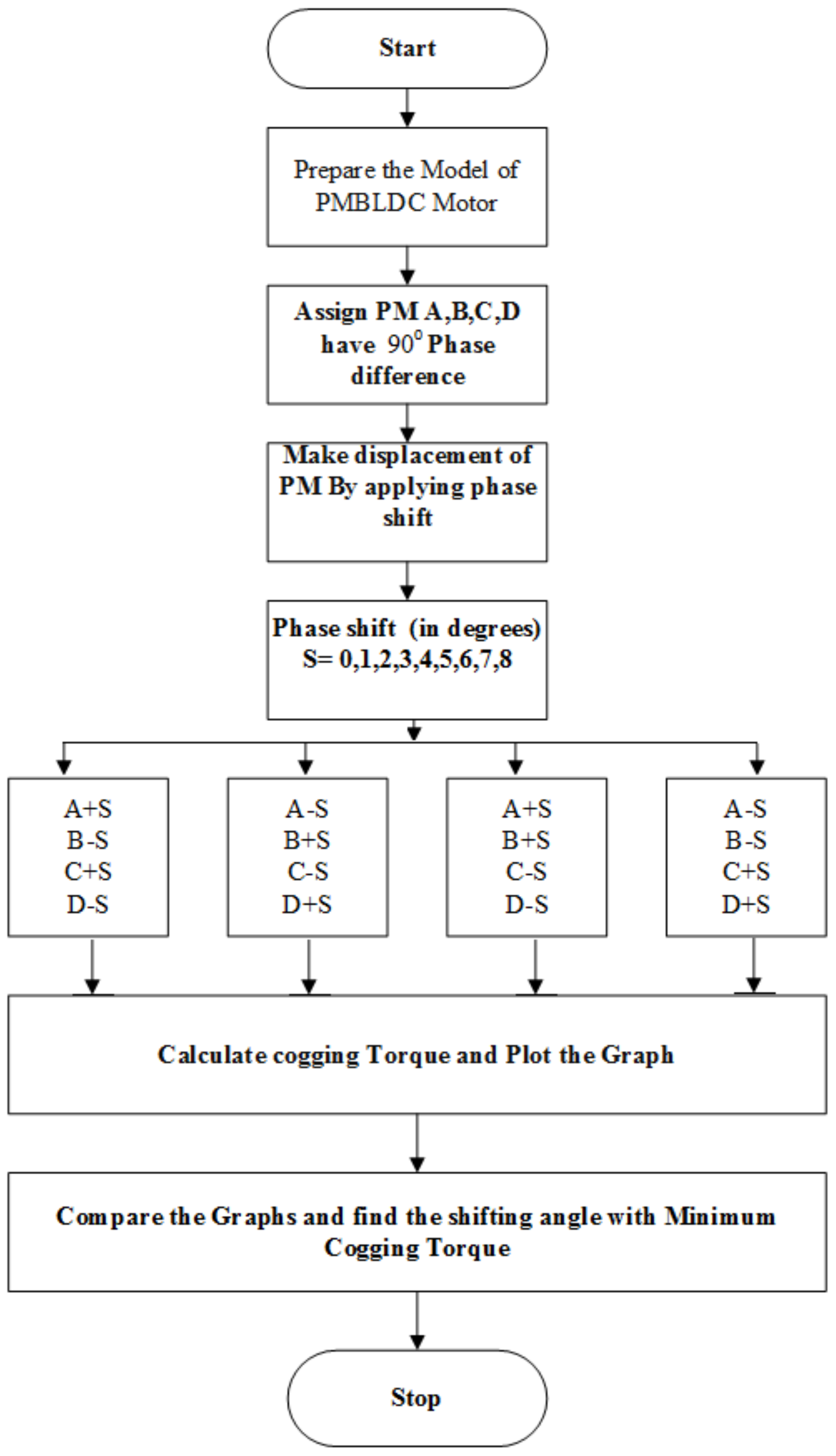
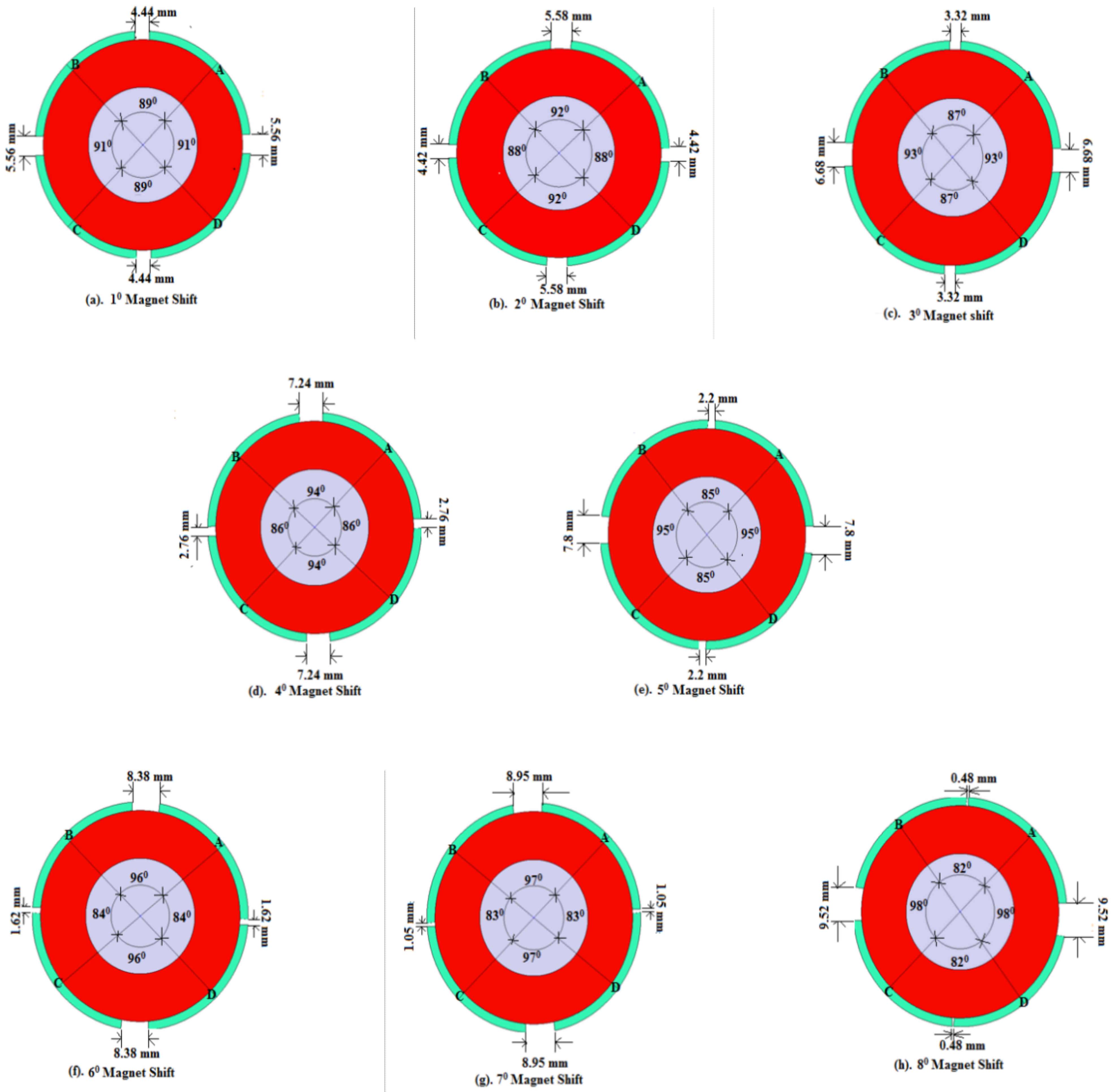
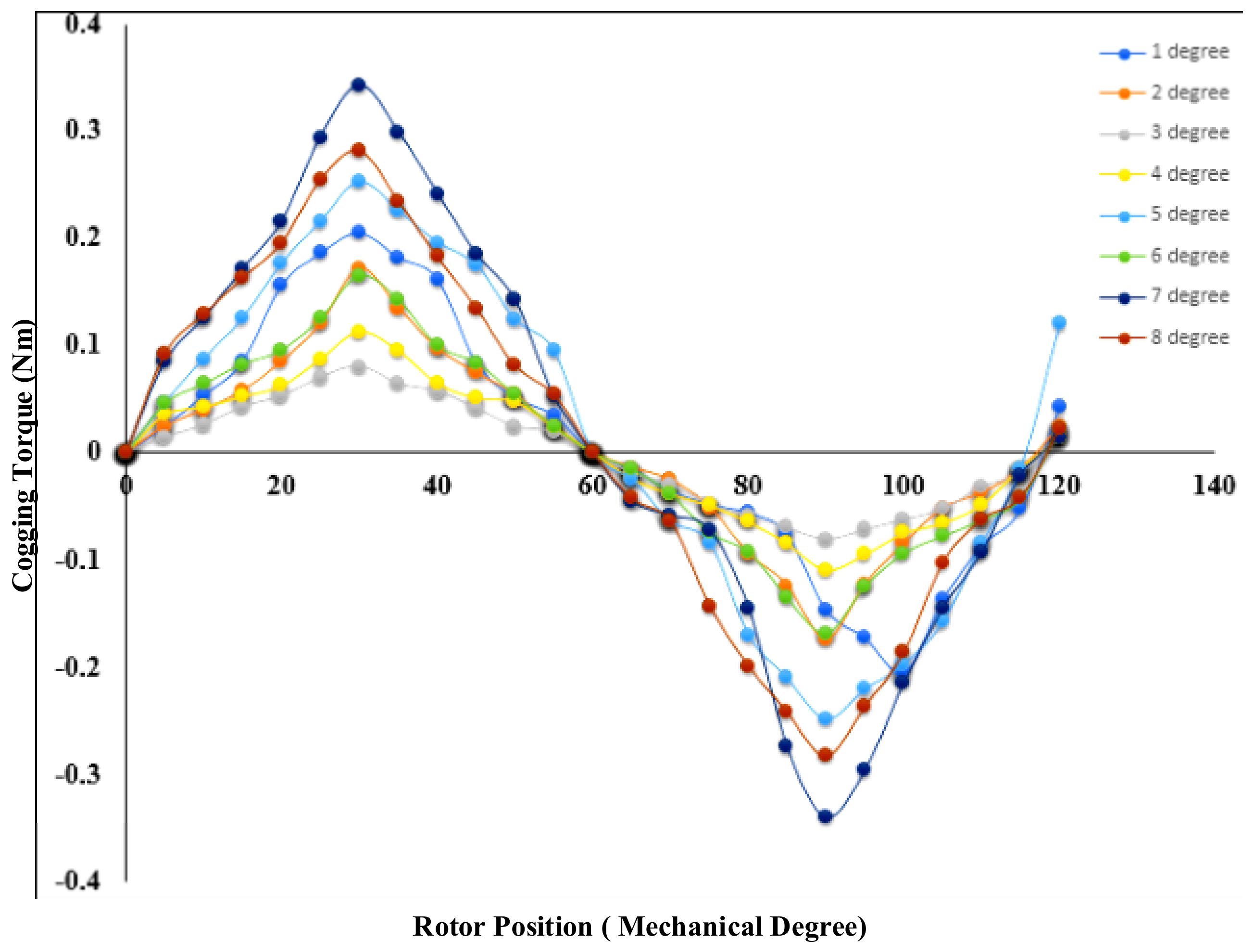
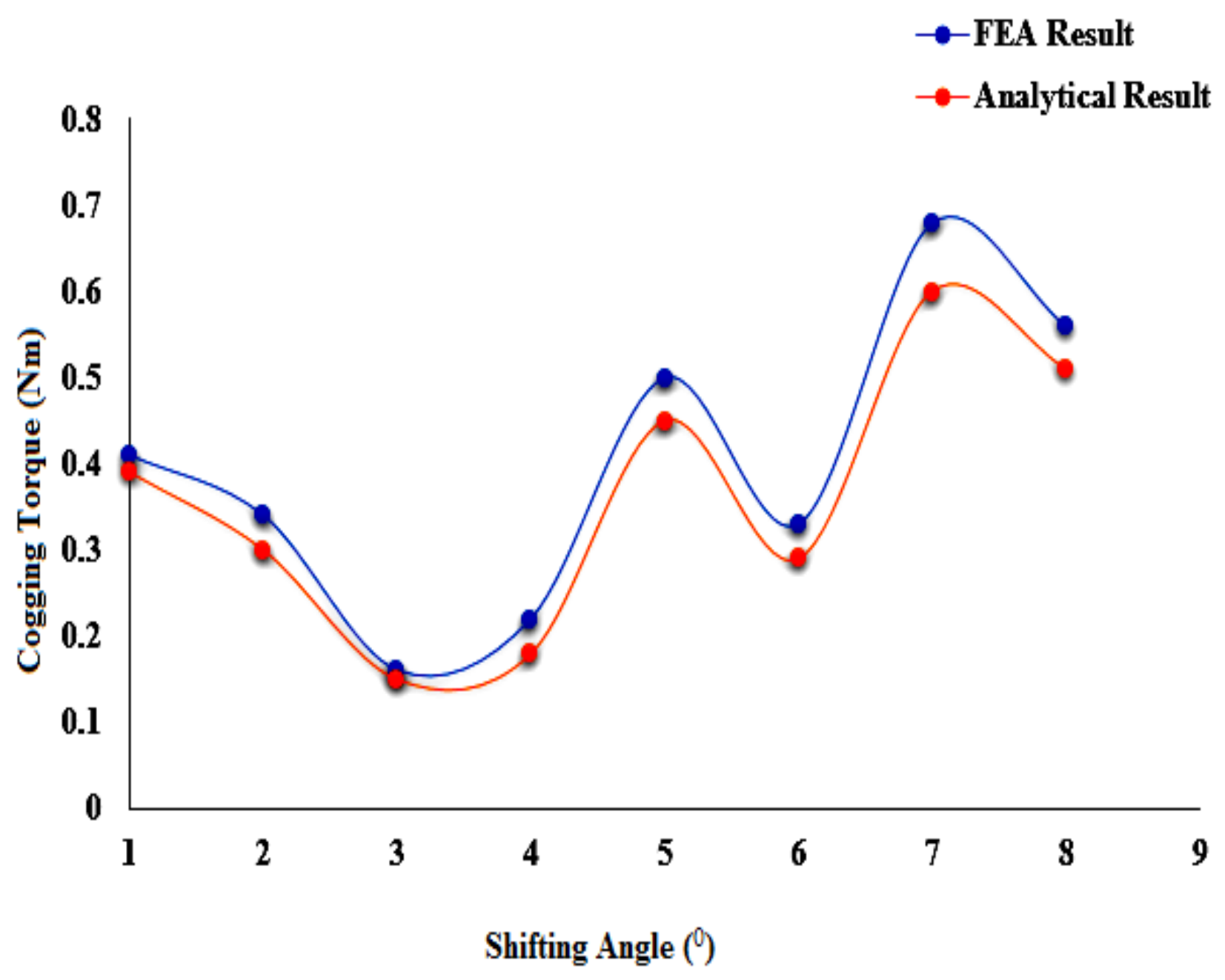
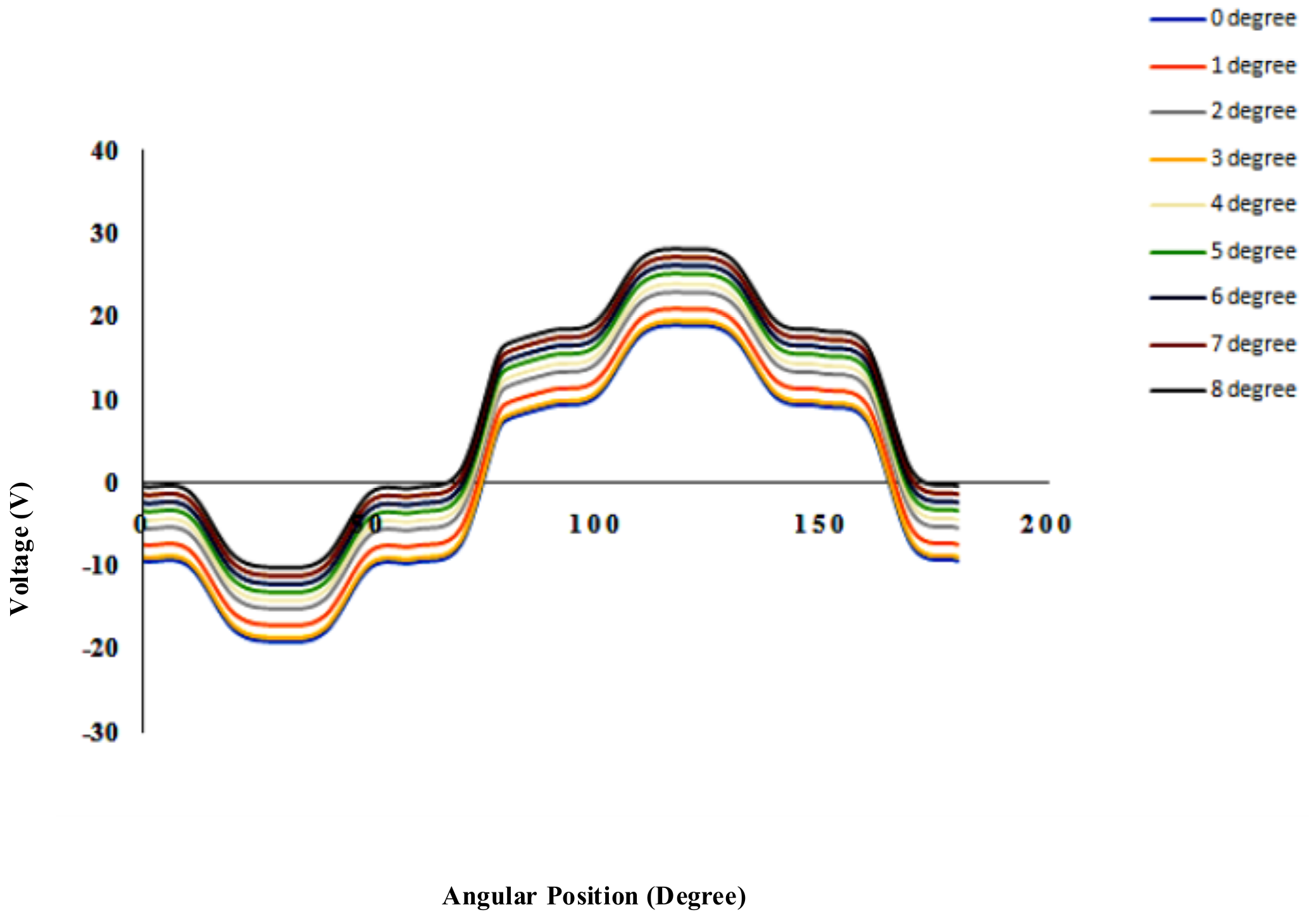
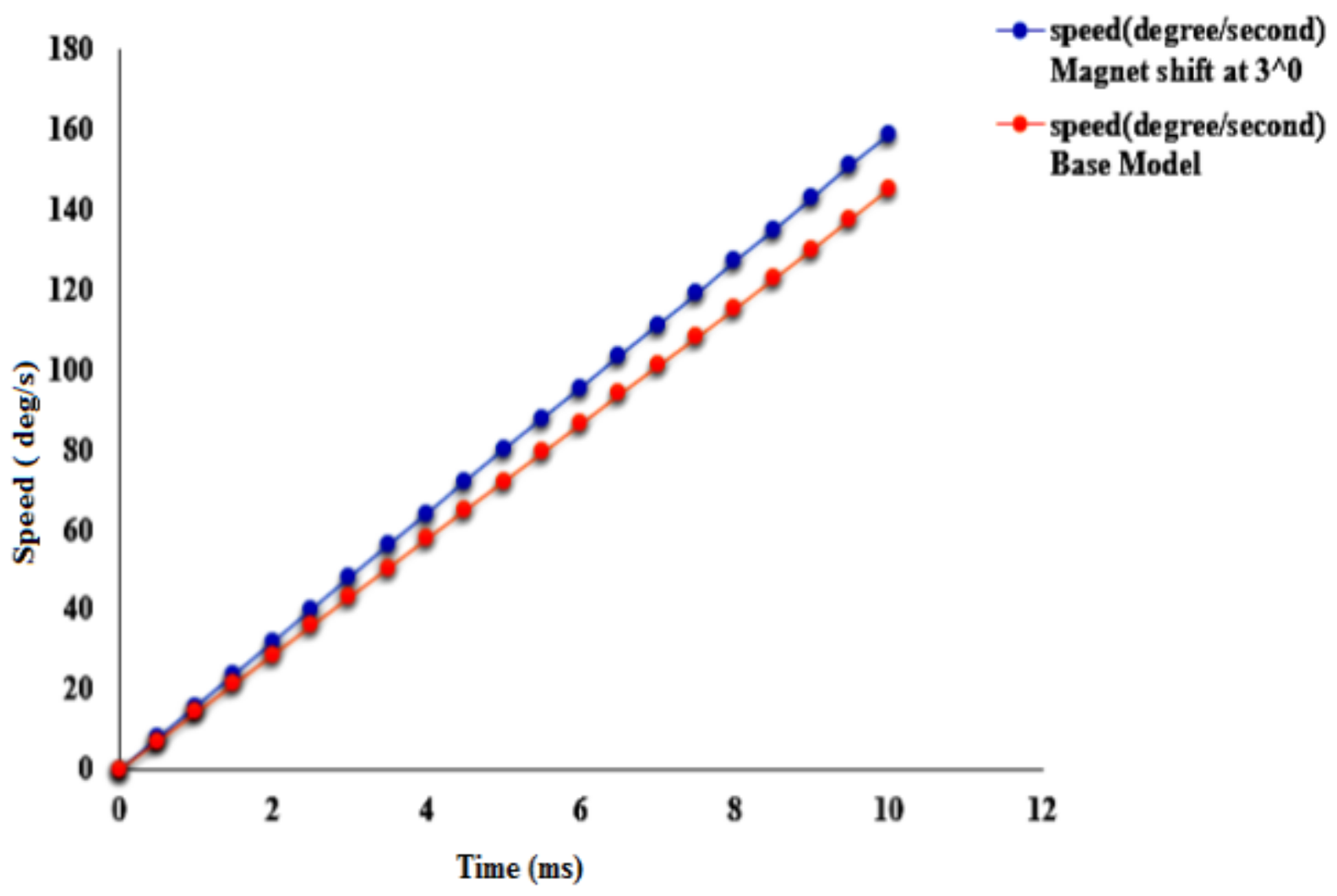
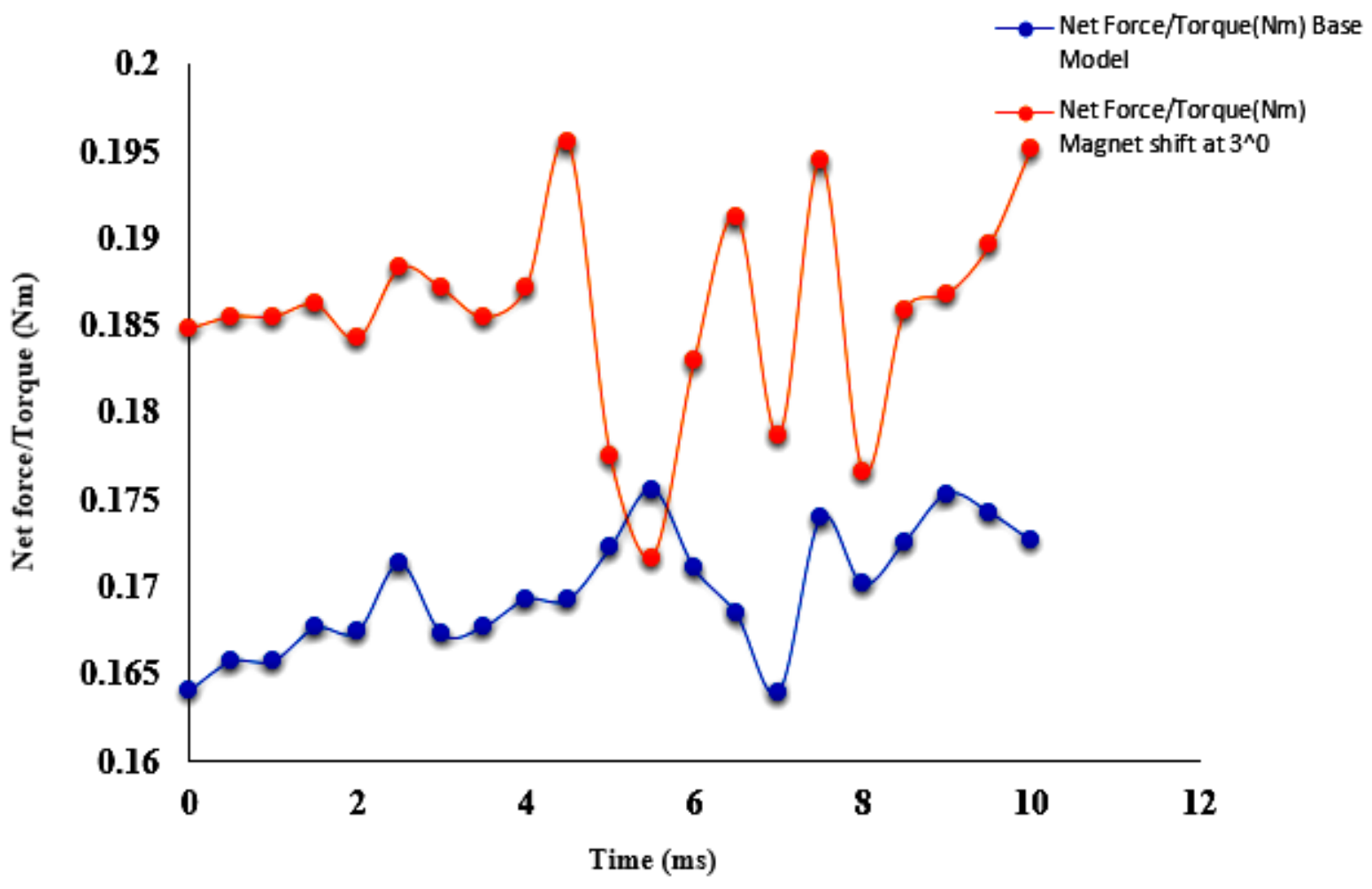
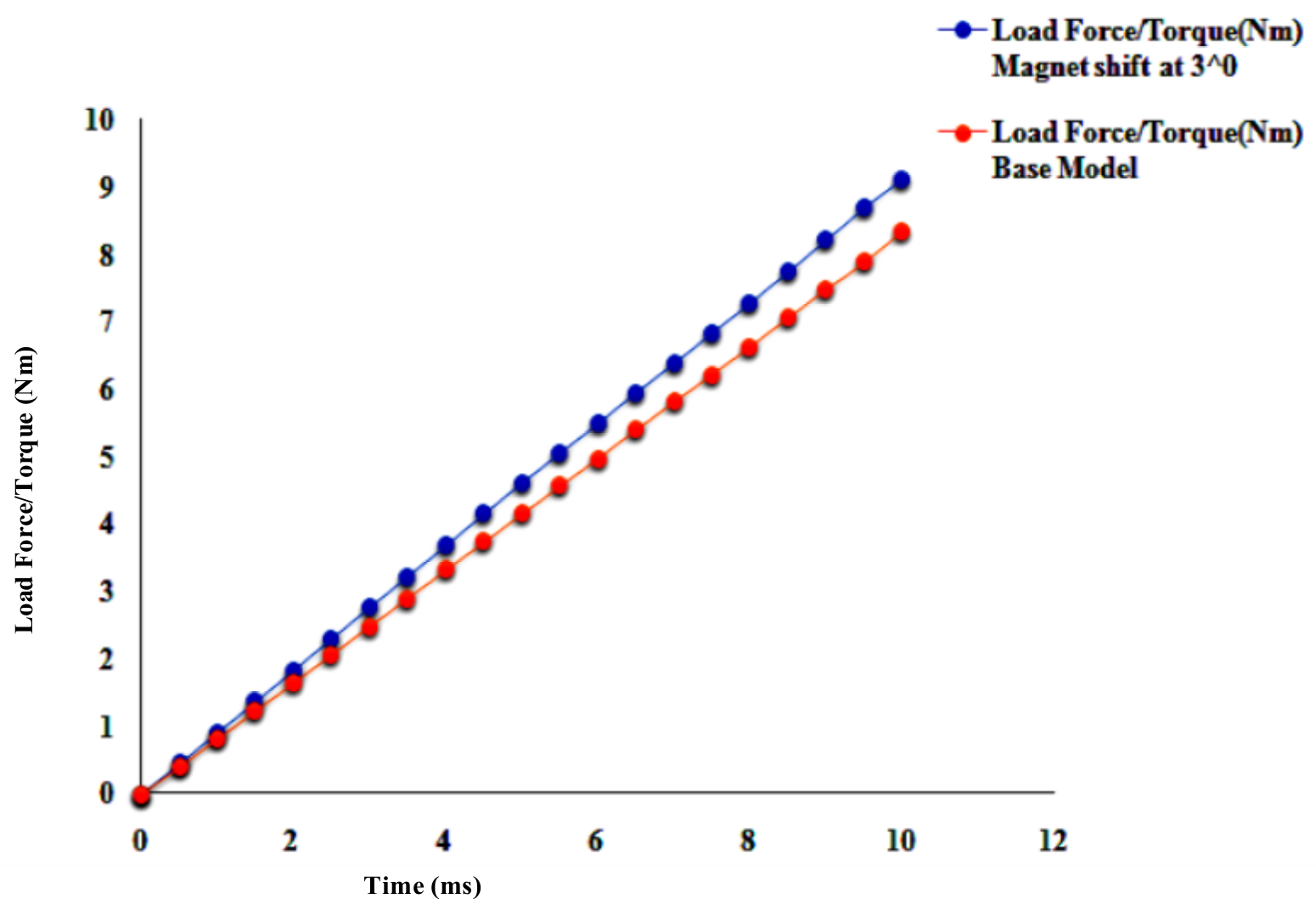
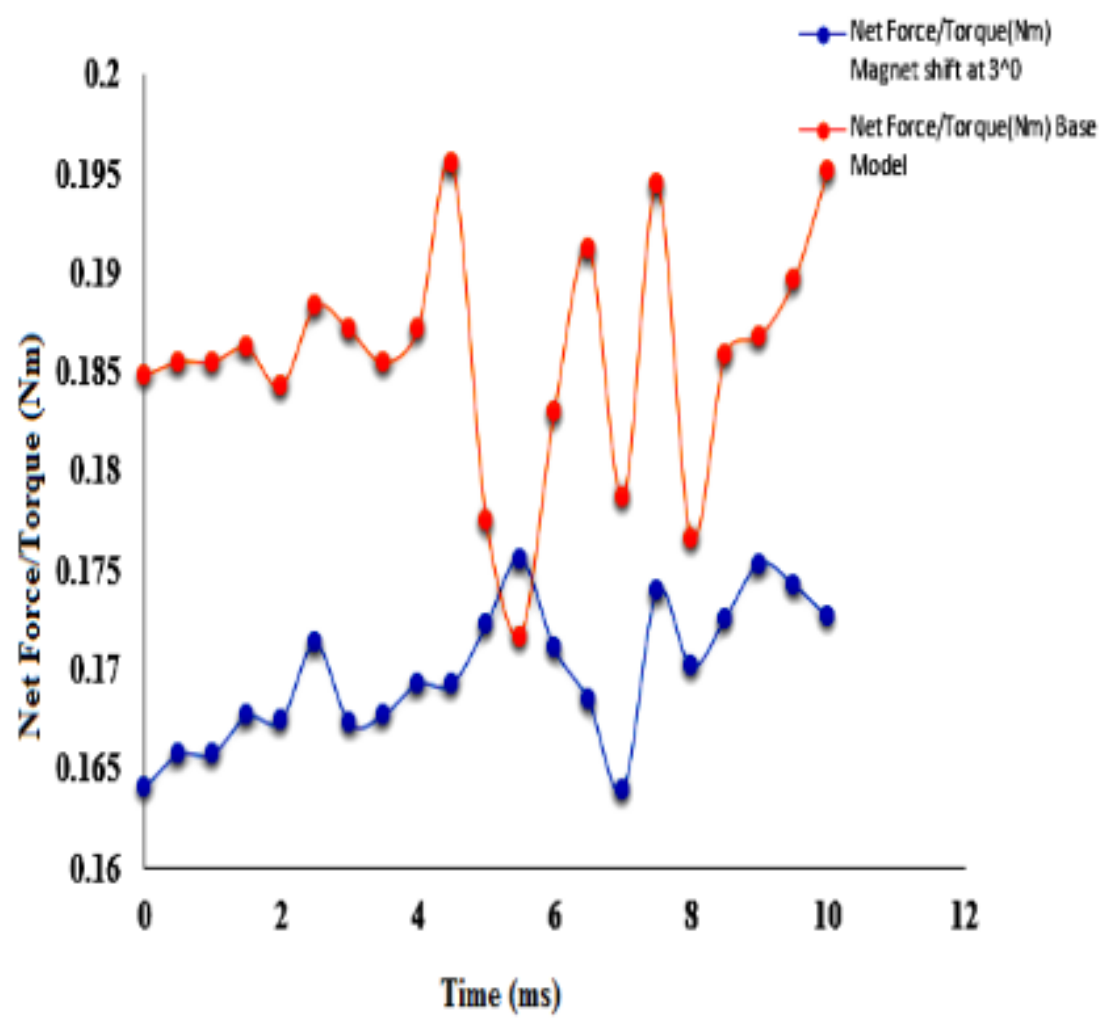
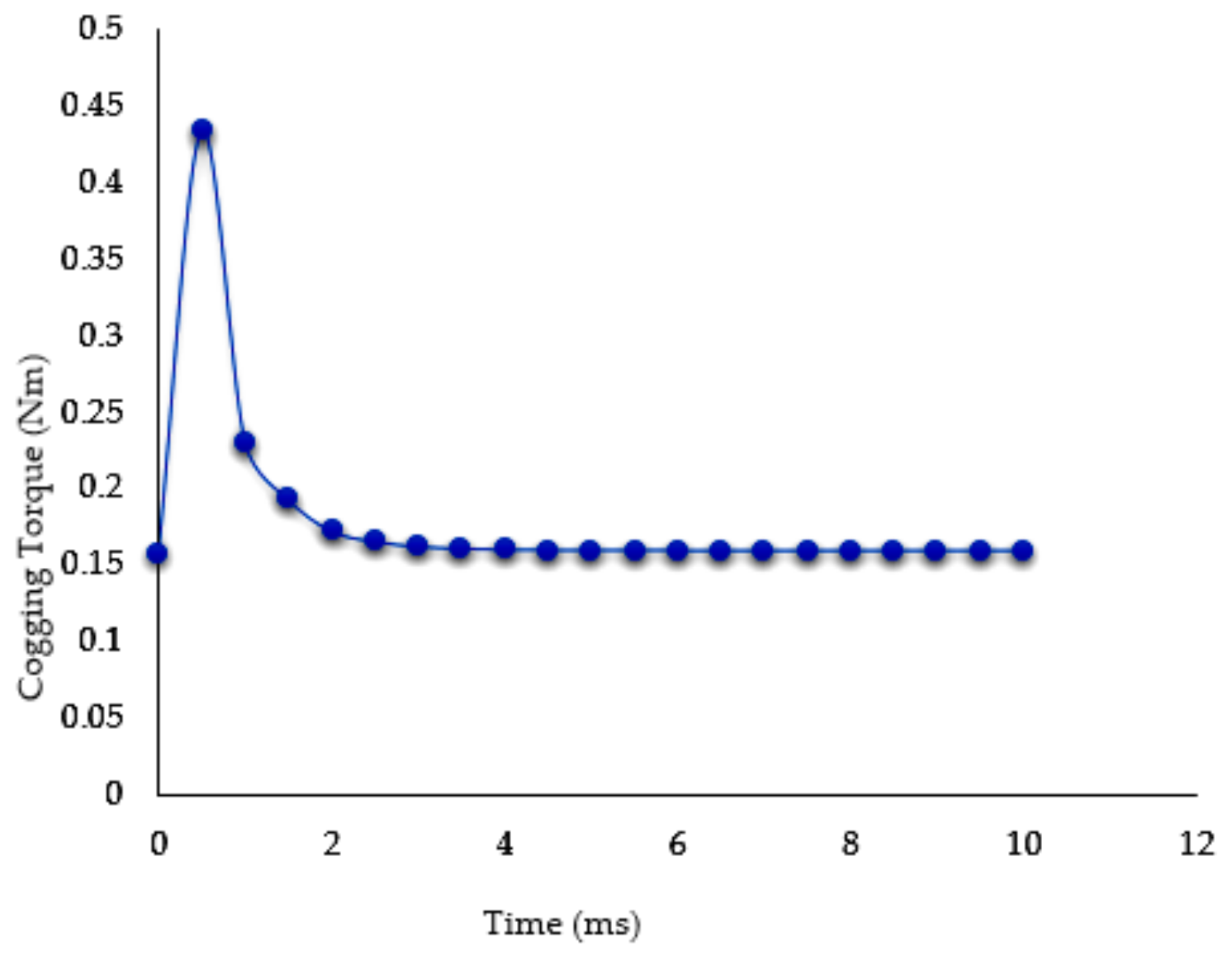
In the context of the exploration of different cogging torque reduction methods, motors with asymmetrical magnets represent a productive technique. This paper introduces a novel design based on an asymmetrical rotor structure by applying a shifting angle to the PM. The shifting angle method is not a skewing method, where the skew technique is used for skewing the rotor PMs. The shifting angle method alters the position of the permanent magnet by changing the pole pitch. To analyze the effect of magnets shifting in the BLDC motor, 3D-FEA analysis and numerical analysis were performed. To study the impact of varying the angle between the permanent magnet on the rotor, a range of different angles were considered. The rotor permanent magnet was shifted from 1° to 8°. To effectively decrease the cogging torque, an optimal 3° shift to the permanent magnet (AB-87°, BC-87°, CD-93°, and DA-93°) was determined. The resulting design also obtained the correct trapezoidal shape of the back-EMF. Compared to the reference model, it was able to achieve a 60% reduction in cogging torque. This method is able to achieve excellent performance characteristics. The simulation results were compared with the analytical results, and the reduction of cogging torque in the two analyses was almost the same.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}