Microgrid Controller Testing Using Power Hardware-in-the-Loop

 ,
,  , , ,
, , ,
Abstract
1. Introduction
- can evaluate the communication between the microgrid controller and the components as well as the power interaction among them, i.e., DG set, PV, BESS, and load;
- appropriately scales the power rating between physical and simulated devices under test (DUT) by adjusting the feedback current and the voltage values to the DRTS.
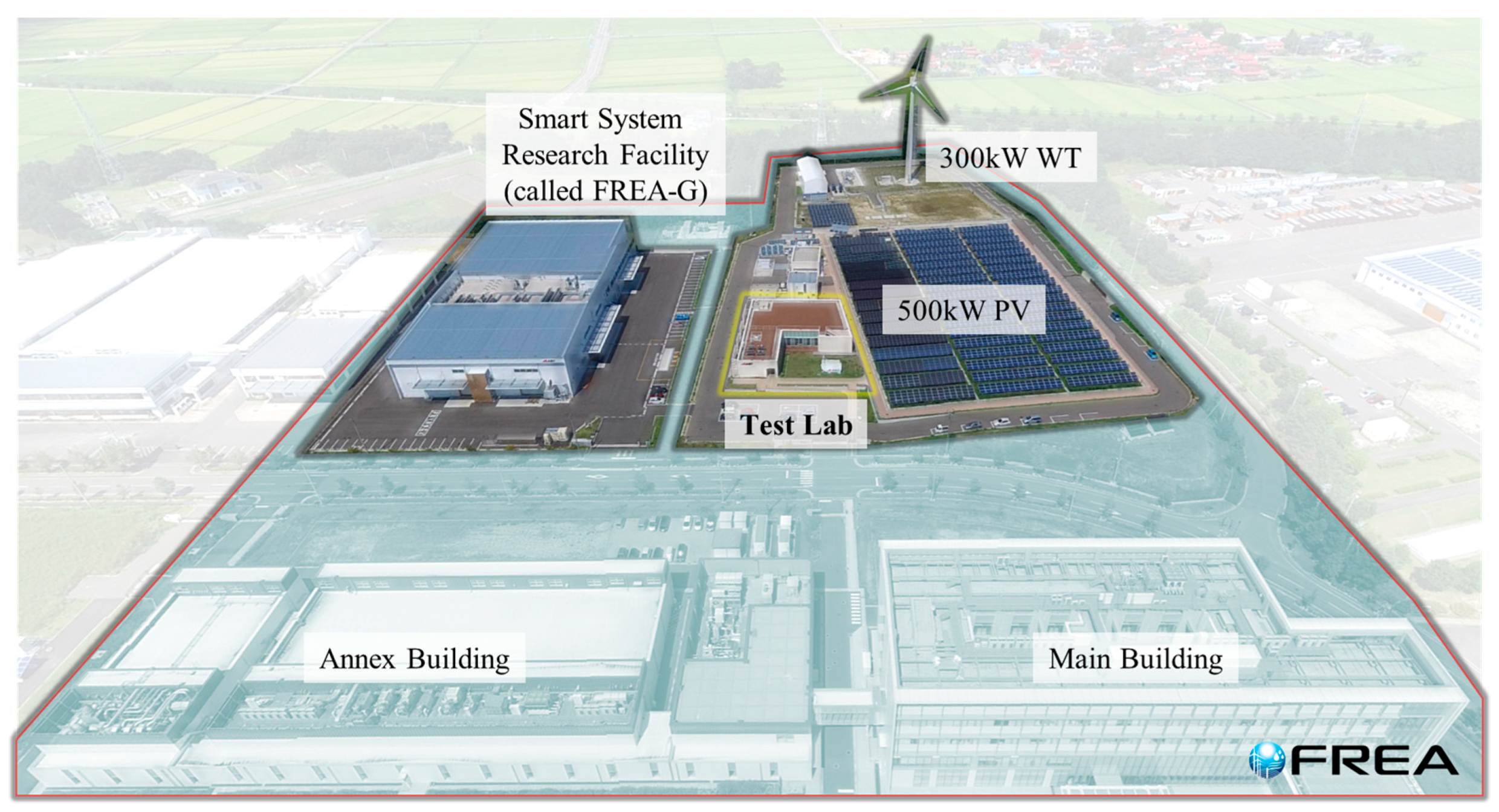
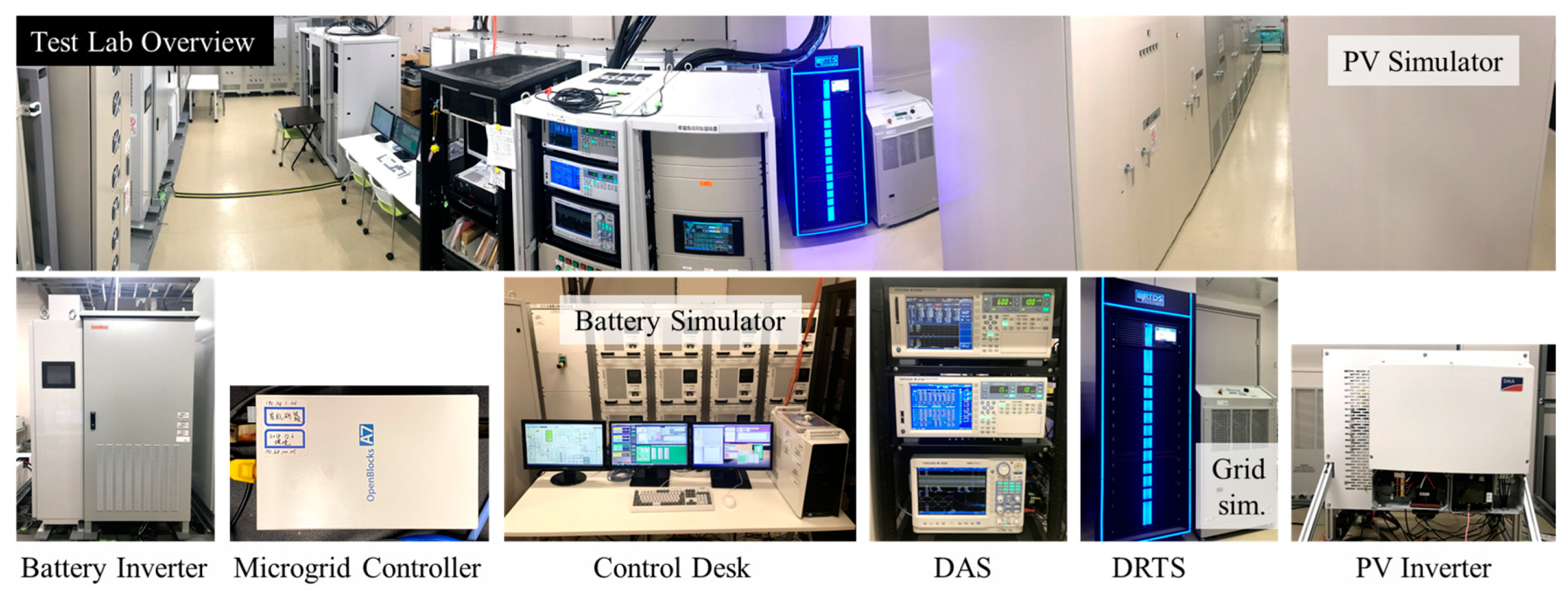
2. Power System Related Testing Facilities in FREA
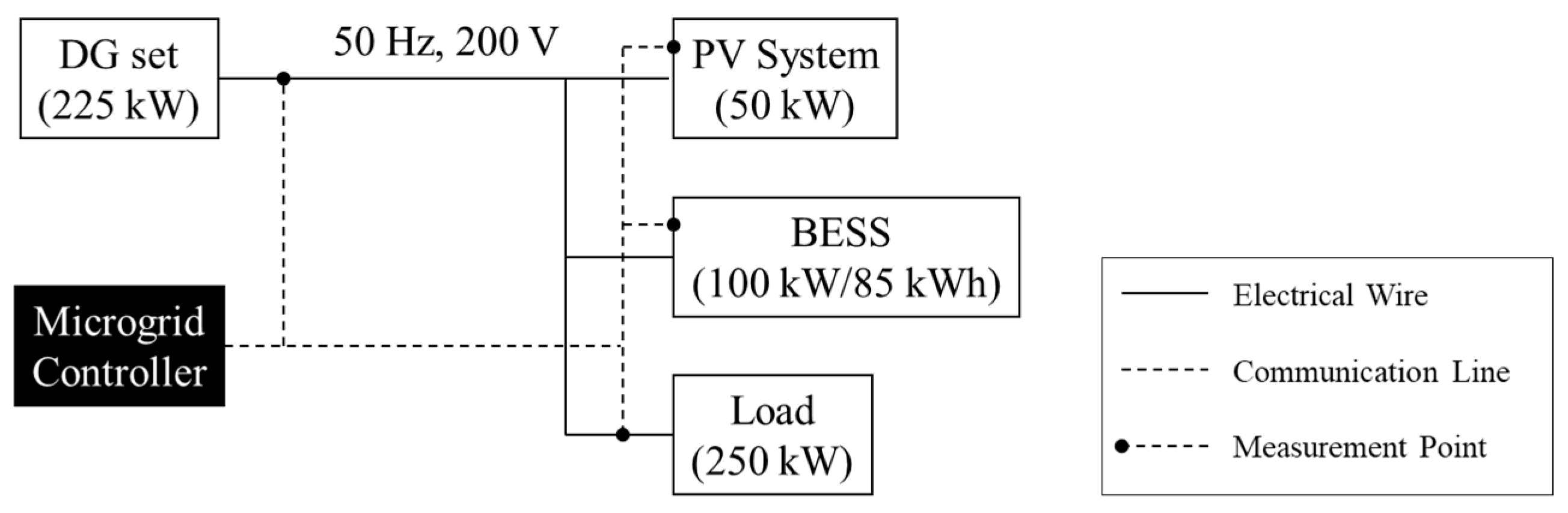
3. Configuration and Functions of the Microgrid
4. PHIL Testing Configuration
5. Results of Microgrid Controller Testing in PHIL Simulation
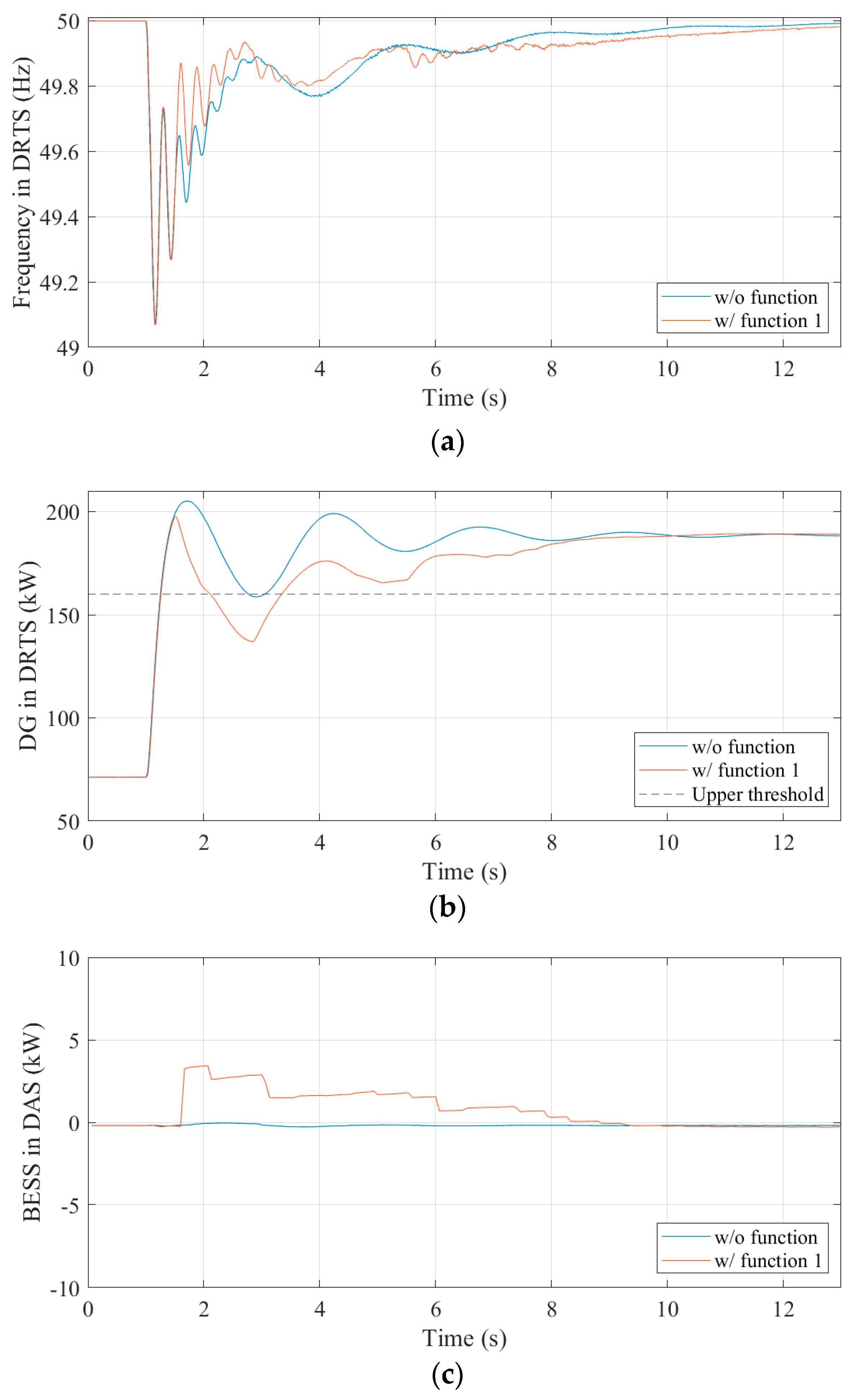
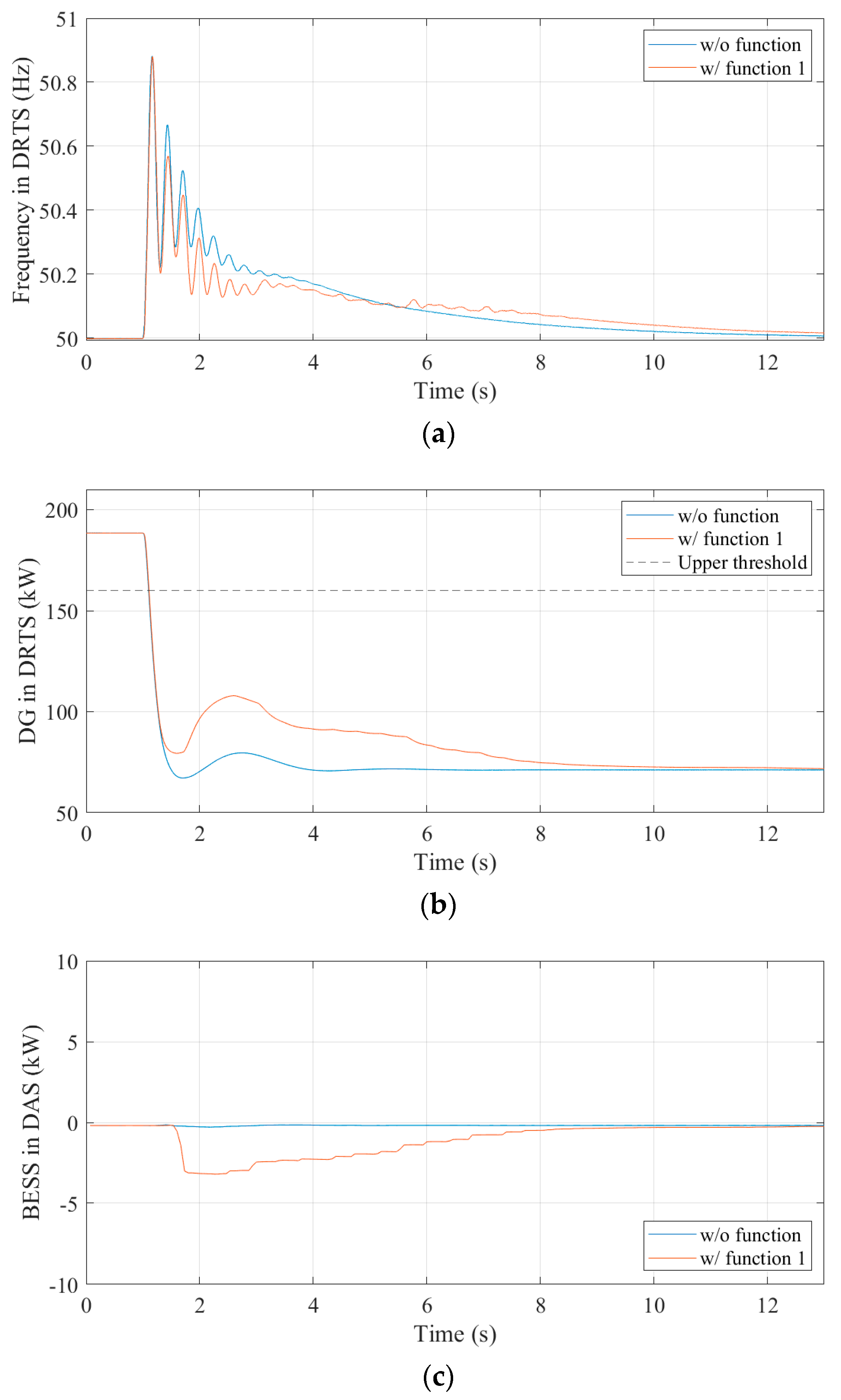
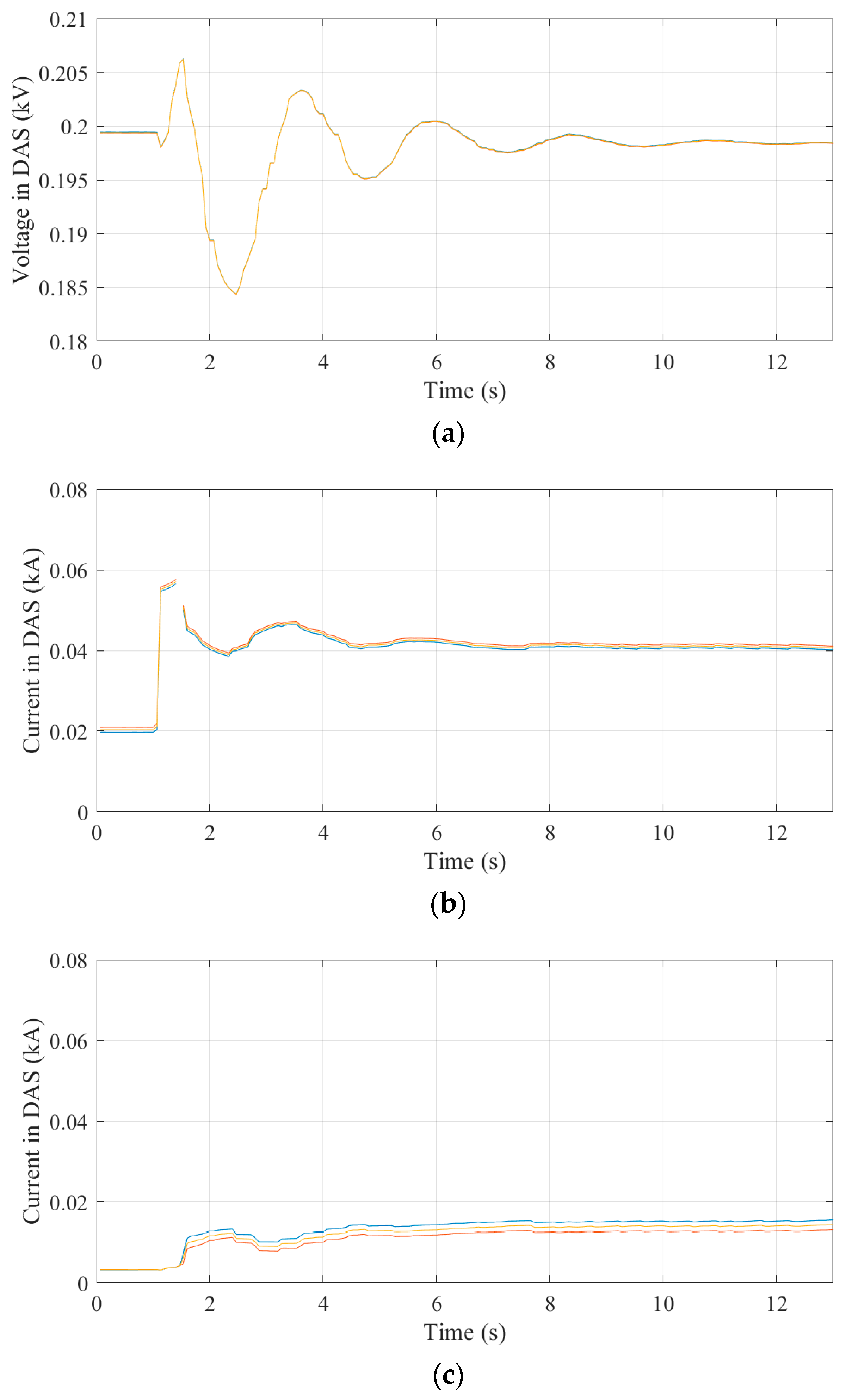
5.1. Testing Results When Function 1 Is Only Activated
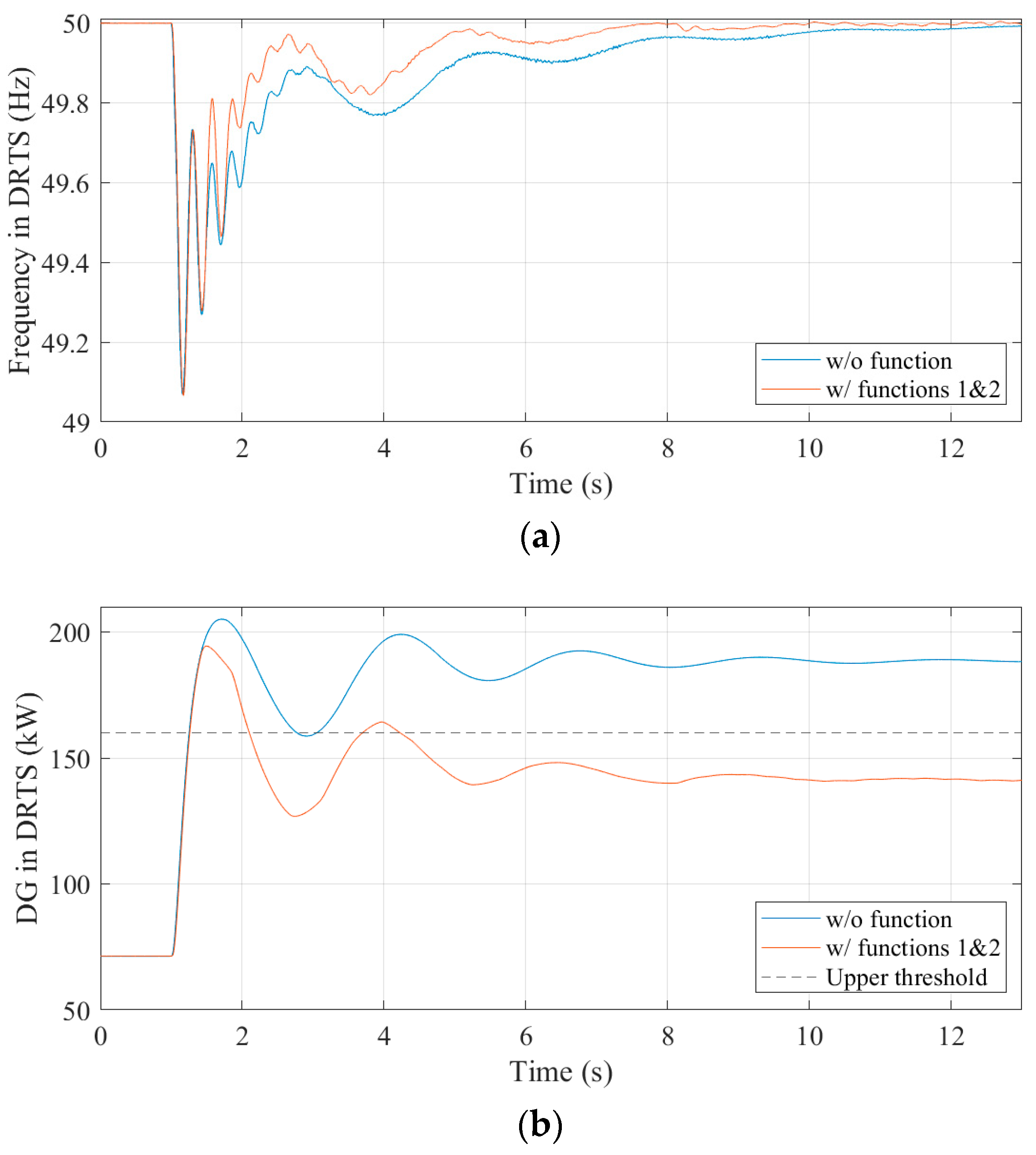
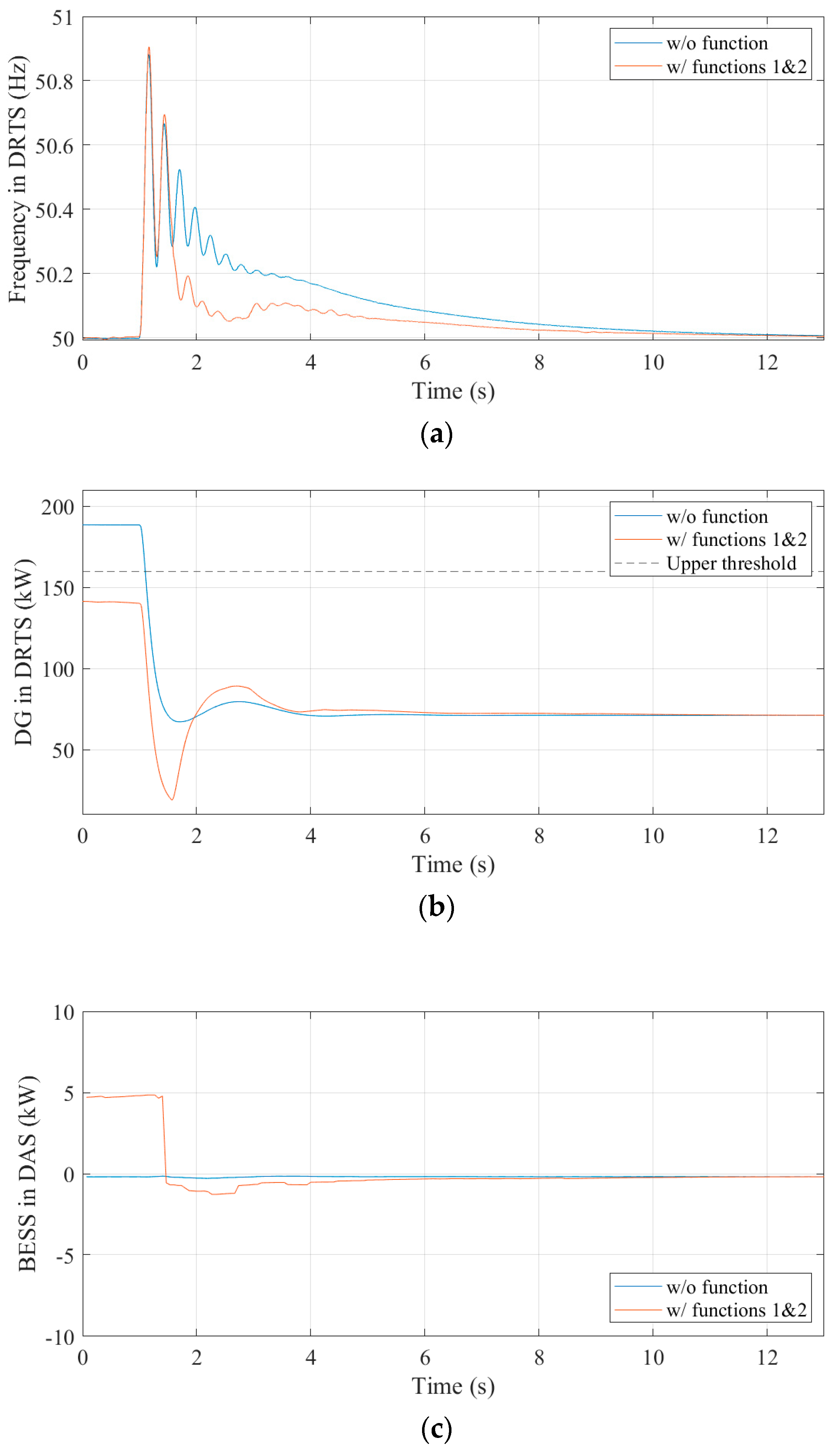
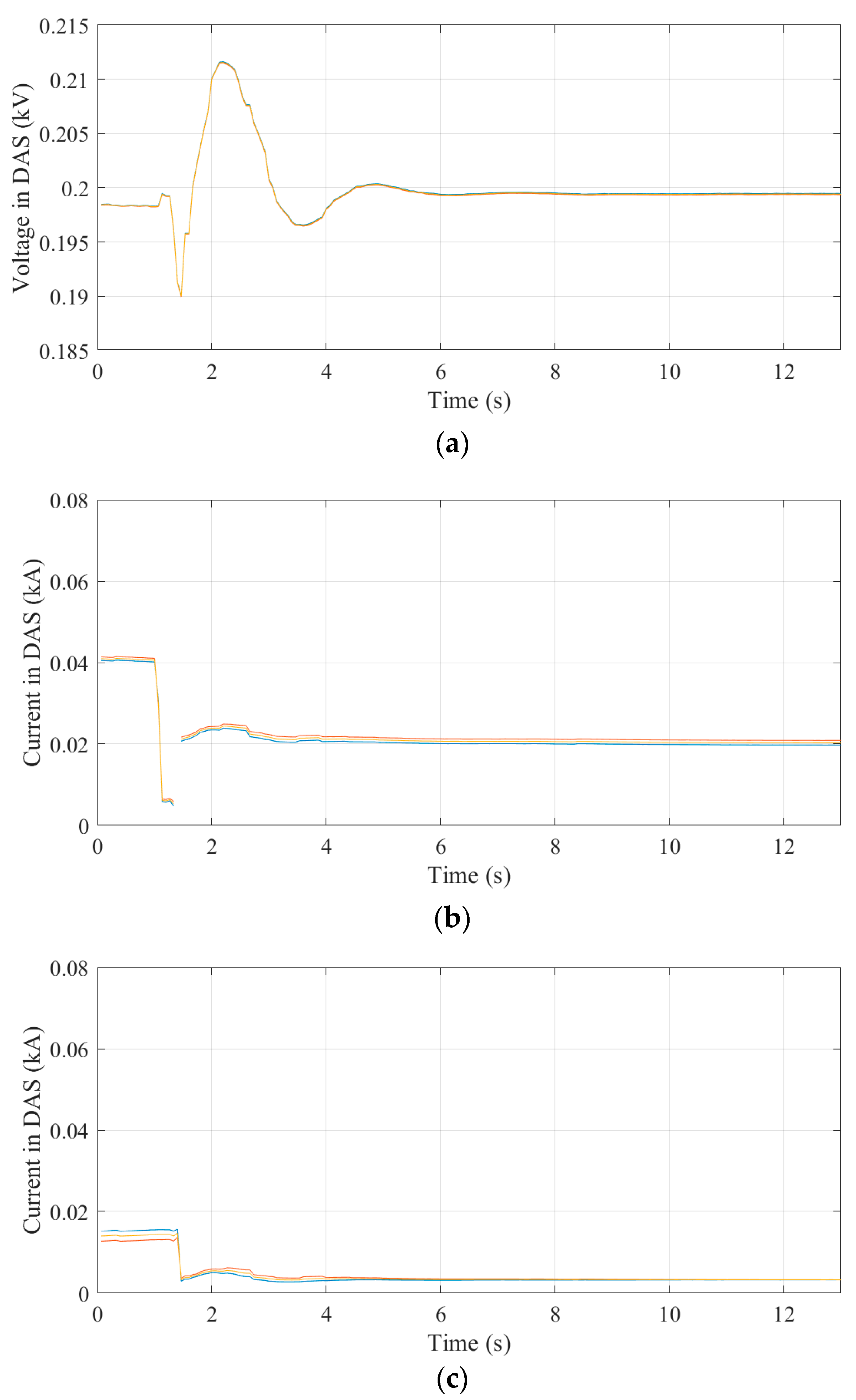
5.2. Testing Results When Both Functions 1 and 2 Are Activated
6. Conclusions
- can validate the communication between microgrid controller and components as well as the power interaction among microgrid components;
- scales the power rating between physical and simulated DUT for compensating the difference between the deployment site and the laboratory.
Author Contributions
Funding
Conflicts of Interest
Appendix A


References
- Almeshqab, F.; Ustun, T.S. Lessons learned from rural electrification initiatives in developing countries: Insights for technical, social, financial and public policy aspects. Renew. Sustain. Energy Rev. 2019, 102, 35–53. [Google Scholar] [CrossRef]
- Energy Access Outlook 2017; IEA: Paris, France, 2017; ISBN 9789264285569.
- National Energy Roadmaps for Islands; IRENA: Abu Dhabi, UAE, 2017.
- Hubble, A.H.; Ustun, T.S. Scaling renewable energy based microgrids in underserved communities: Latin America, South Asia, and Sub-Saharan Africa. In Proceedings of the 2016 IEEE PES PowerAfrica, Livingstone, Zambia, 29 June–3 July 2016. [Google Scholar]
- 2030.7-2017—IEEE Standard for the Specification of Microgrid Controllers; IEEE: New York, NY, USA, 2018; ISBN 9781504445153.
- 2030.8-2018—IEEE Standard for the Testing of Microgrid Controllers; IEEE: New York, NY, USA, 2018; ISBN 9781504450508.
- Hashimoto, J.; Rodríguez-Seco, J.E.; Merino, J.; Perez-Basante, A.; Jimeno, J.; Strasser, T.I.; Seitl, C.; Messner, C. Testing of Microgrid Control Systems According to IEEE 2030.8—Experiences and Learnings from Laboratory Tests. 36th Eur. Photovolt. Sol. Energy Conf. Exhib. 2019, 1357–1362. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Salcedo, R.; Corbett, E.; Smith, C.; Limpaecher, E.; Rekha, R.; Nowocin, J.; Lauss, G.; Fonkwe, E.; Almeida, M.; Gartner, P.; et al. Banshee distribution network benchmark and prototyping platform for hardware-in-the-loop integration of microgrid and device controllers. J. Eng. 2019, 2019, 5365–5373. [Google Scholar] [CrossRef]
- Meng, L.; Luna, A.; Diaz, E.; Sun, B.; Dragicevic, T.; Savaghebi, M.; Vasquez, J.; Guerrero, J.; Graells, M. Flexible System Integration and Advanced Hierarchical Control Architectures in the Microgrid Research Laboratory of Aalborg University. IEEE Trans. Ind. Appl. 2015, 52, 1736–1749. [Google Scholar] [CrossRef]
- Akagi, S.; Takahashi, R.; Kaneko, A.; Yoshinaga, J.; Ito, M.; Hayashi, Y.; Asano, H.; Konda, H. Upgrading the voltage control method based on the photovoltaic penetration rate. IEEE Trans. Smart Grid 2018, 9, 3994–4003. [Google Scholar] [CrossRef]
- Huerta, F.; Gruber, J.K.; Prodanovic, M.; Matatagui, P. Power-hardware-in-the-loop test beds: Evaluation tools for grid integration of distributed energy resources. IEEE Ind. Appl. Mag. 2016, 22, 18–26. [Google Scholar] [CrossRef]
- Kikusato, H.; Shimizu, T.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Shirakawa, K.; Yabuki, R.; Watanabe, K. Integrated Power Hardware-in-the-Loop and Lab Testing for Microgrid Controller. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2743–2747. [Google Scholar]
- Xiao, B.; Starke, M.; Liu, G.; Ollis, B.; Prabakar, K.; Dowling, K.; Xu, Y. Development of hardware-in-the-loop microgrid testbed. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1196–1202. [Google Scholar]
- Huo, Y.; Gruosso, G. Hardware-in-the-Loop Framework for Validation of Ancillary Service in Microgrids: Feasibility, Problems and Improvement. IEEE Access 2019, 7, 58104–58112. [Google Scholar] [CrossRef]
- Oh, S.-J.; Yoo, C.-H.; Chung, I.-Y.; Won, D.-J. Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids. Energies 2013, 6, 3263. [Google Scholar] [CrossRef]
- Wang, J.; Miller, B.; Pratt, A.; Fossum, J.; Bialek, T.; Manson, S.; Symko-Davies, M. Diesel Generator Controller Evaluation via Controller-Hardware-in-the-Loop for Various Microgrid Operation Modes. In Proceedings of the 2019 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–21 February 2019; pp. 1–5. [Google Scholar]
- Mentesidi, K.; Rikos, E.; Kleftakis, V.; Kotsampopoulos, P.; Santamaria, M.; Aguado, M. Implementation of a microgrid model for DER integration in real-time simulation platform. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2274–2279. [Google Scholar]
- Kotsampopoulos, P.; Lagos, D.; Hatziargyriou, N.; Faruque, M.O.; Lauss, G.; Nzimako, O.; Forsyth, P.; Steurer, M.; Ponci, F.; Monti, A.; et al. A Benchmark System for Hardware-in-the-Loop Testing of Distributed Energy Resources. IEEE Power Energy Technol. Syst. J. 2018, 5, 94–103. [Google Scholar] [CrossRef]
- Kakigano, H.; Hiraiwa, T.; Fujiwara, H.; Miura, Y.; Ise, T. An analysis method of a DC microgrid using hardware-in-the-loop simulation. In Proceedings of the 2012 IEEE 13th Workshop on Control and Modeling for Power Electronics (COMPEL), Kyoto, Japan, 10–13 June 2012; pp. 1–6. [Google Scholar]
- Kotsampopoulos, P.C.; Kleftakis, V.A.; Hatziargyriou, N.D. Laboratory Education of Modern Power Systems Using PHIL Simulation. IEEE Trans. Power Syst. 2017, 32, 3992–4001. [Google Scholar] [CrossRef]
- Wang, J.; Song, Y.; Li, W.; Guo, J.; Monti, A. Development of a Universal Platform for Hardware In-the-Loop Testing of Microgrids. IEEE Trans. Ind. Inform. 2014, 10, 2154–2165. [Google Scholar] [CrossRef]
- Ustun, T.S.; Nakamura, Y.; Hashimoto, J.; Otani, K. Performance analysis of PV panels based on different technologies after two years of outdoor exposure in Fukushima, Japan. Renew. Energy 2019, 136, 159–178. [Google Scholar] [CrossRef]
- Nippon Koei Develops Storage Battery Control System for Controlling Power Frequency Commencement of Balancing Services in the U.K. from 2018; Nippon Koei Co., Ltd.: Tokyo, Japan, 2018.
- Milano, F.; Florian, D.; Eth, Z.; Hill, D.J.; Verbič, G. Foundations and Challenges of Low-Inertia Systems. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Real Rating (in DRTS) | Lab Equipment | ||
|---|---|---|---|
| Capacity | Tested Rating (Scaled) | ||
| DG Set | 225 (kW) | 30 (kW) | 22.5 (kW) |
| PV System | 50 (kW) | 10 (kW) | 5 (kW) |
| Load | 250 (kW) | 250 (kW) | 25 (kW) |
| BESS | 100 (kW) | 50 (kW) | 10 (kW) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kikusato, H.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Shirakawa, K.; Yabuki, R.; Watanabe, K.; Shimizu, T. Microgrid Controller Testing Using Power Hardware-in-the-Loop. Energies 2020, 13, 2044. https://doi.org/10.3390/en13082044
Kikusato H, Ustun TS, Suzuki M, Sugahara S, Hashimoto J, Otani K, Shirakawa K, Yabuki R, Watanabe K, Shimizu T. Microgrid Controller Testing Using Power Hardware-in-the-Loop. Energies. 2020; 13(8):2044. https://doi.org/10.3390/en13082044
Chicago/Turabian StyleKikusato, Hiroshi, Taha Selim Ustun, Masaichi Suzuki, Shuichi Sugahara, Jun Hashimoto, Kenji Otani, Kenji Shirakawa, Rina Yabuki, Ken Watanabe, and Tatsuaki Shimizu. 2020. "Microgrid Controller Testing Using Power Hardware-in-the-Loop" Energies 13, no. 8: 2044. https://doi.org/10.3390/en13082044
APA StyleKikusato, H., Ustun, T. S., Suzuki, M., Sugahara, S., Hashimoto, J., Otani, K., Shirakawa, K., Yabuki, R., Watanabe, K., & Shimizu, T. (2020). Microgrid Controller Testing Using Power Hardware-in-the-Loop. Energies, 13(8), 2044. https://doi.org/10.3390/en13082044