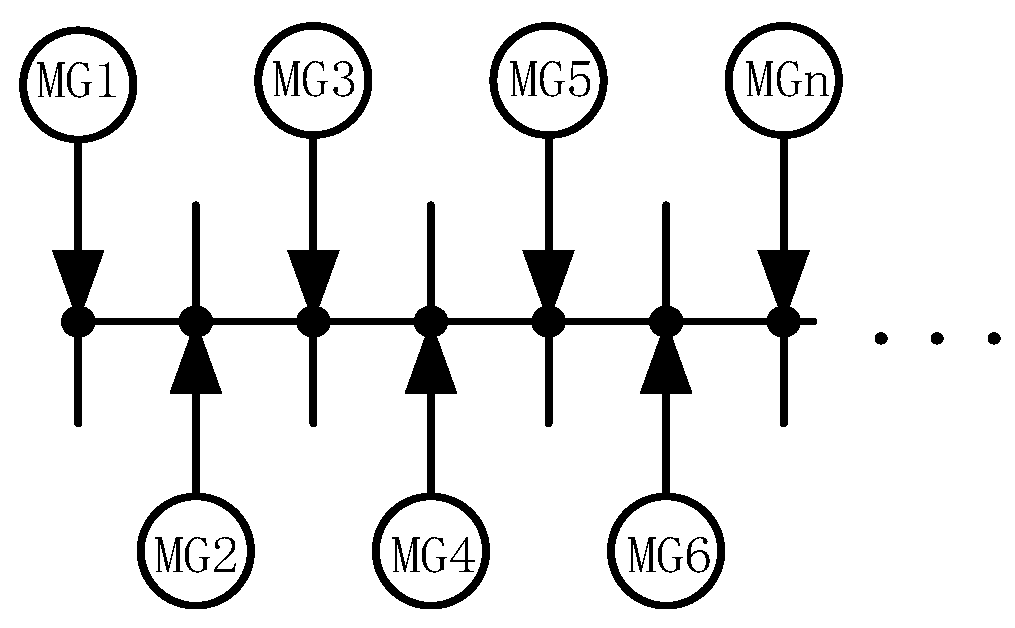
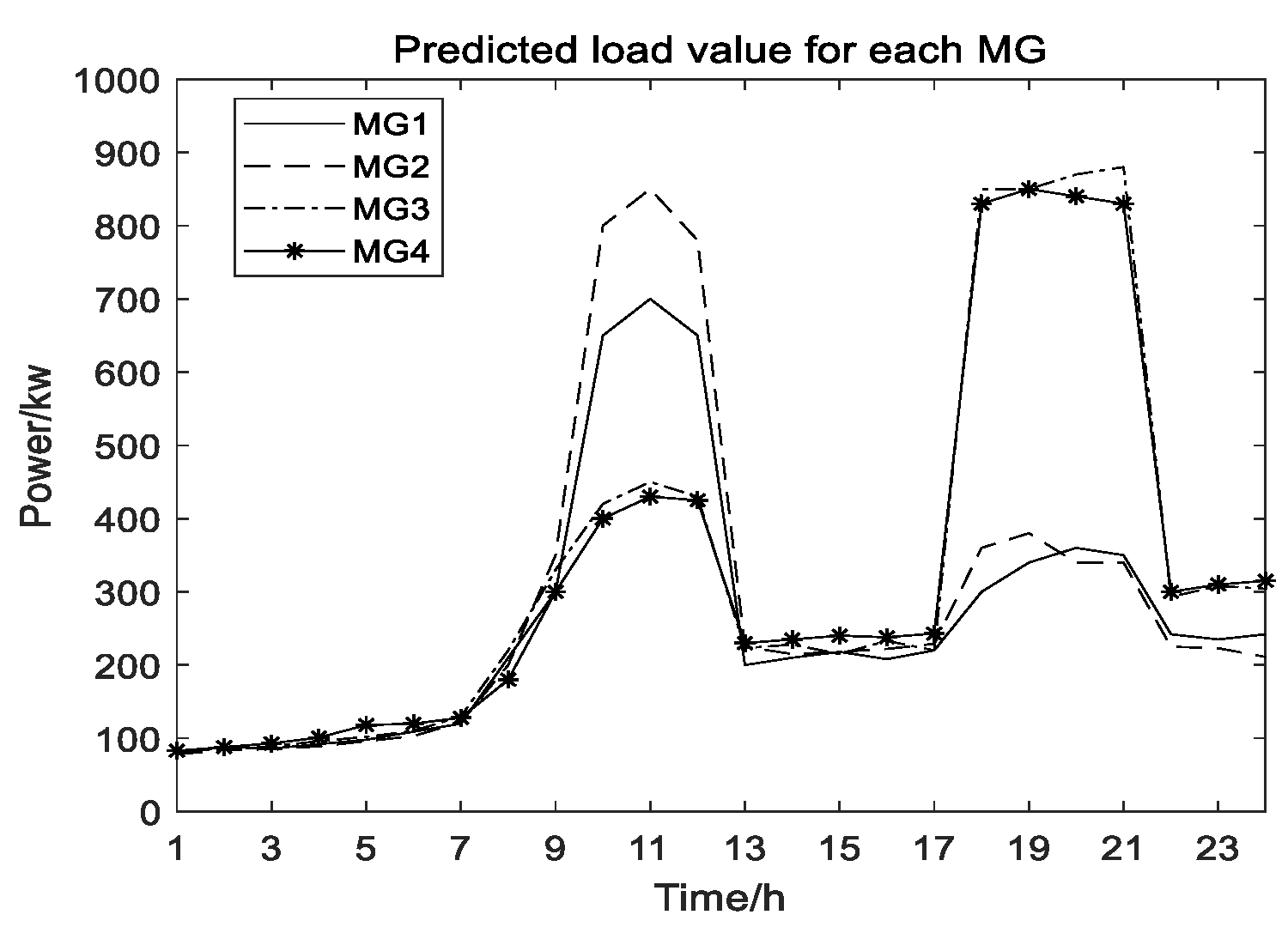
In the simulation example presented in this section, the multi-microgrid system is composed of four microgrids. The maximum rated power generation of MG1, MG2, MG3 and MG4 is 500, 600, 700 and 650 kW, respectively, and the 24-hour forecast load demand of each microgrid is shown in
Figure 5.
As can be seen from
Figure 5, the forecast load demand peak periods of the multi-microgrid system are between 9:00 and 12:00 and 18:00 and 21:00. Outside the peak periods, there is no need to purchase power from outside as the load demand of each microgrid is less than its maximum power generation. In the period between 10:00 and 12:00, the load demands of microgrid 1 and microgrid 2 exceed their maximum generation power. Therefore, they need to purchase electricity from other microgrids, which include microgrid 3 and microgrid 4, which have excess power generation capacity. In the period between 18:00 and 21:00, the load demand of microgrid 3 and microgrid 4 exceeds their maximum generating power. Therefore, they need to purchase electricity from other microgrids, which include microgrid 1 and microgrid 2 with excess generating capacity. During these two peak periods, each sub-microgrid in the multi-microgrid system requires the energy mutual aid.
6.1. Comparison between OPF Based on Second-Order Cone Programming and Dispatch Based on Equal Ratio Power Consensus Algorithm
Using scheme two described in
Section 3.1, the problem of energy exchange between microgrids during the two peak periods is transformed into an OPF problem of the four nodes system. From 9:00 to 12:00, the power to be purchased by microgrid 1 and microgrid 2 is represented as the power demand of virtual loads
PL1 and
PL2, and the excess generation capacity of microgrid 3 and microgrid 4 is represented as the maximum rated generation power of virtual powers
PG3 and
PG4. Similarly, from 18:00 to 21:00, the power to be purchased externally of microgrid 3 and microgrid 4 is considered as the power demand of virtual loads
PL3 and
PL4, and the excess generation capacity of microgrid 1 and microgrid 2 is considered as the maximum rated generation power of virtual powers
PG1 and
PG2.
The results after the nodal processing of prediction data of each microgrid for the two peak periods based on Scheme 2 are shown in
Table 1 and
Table 2.
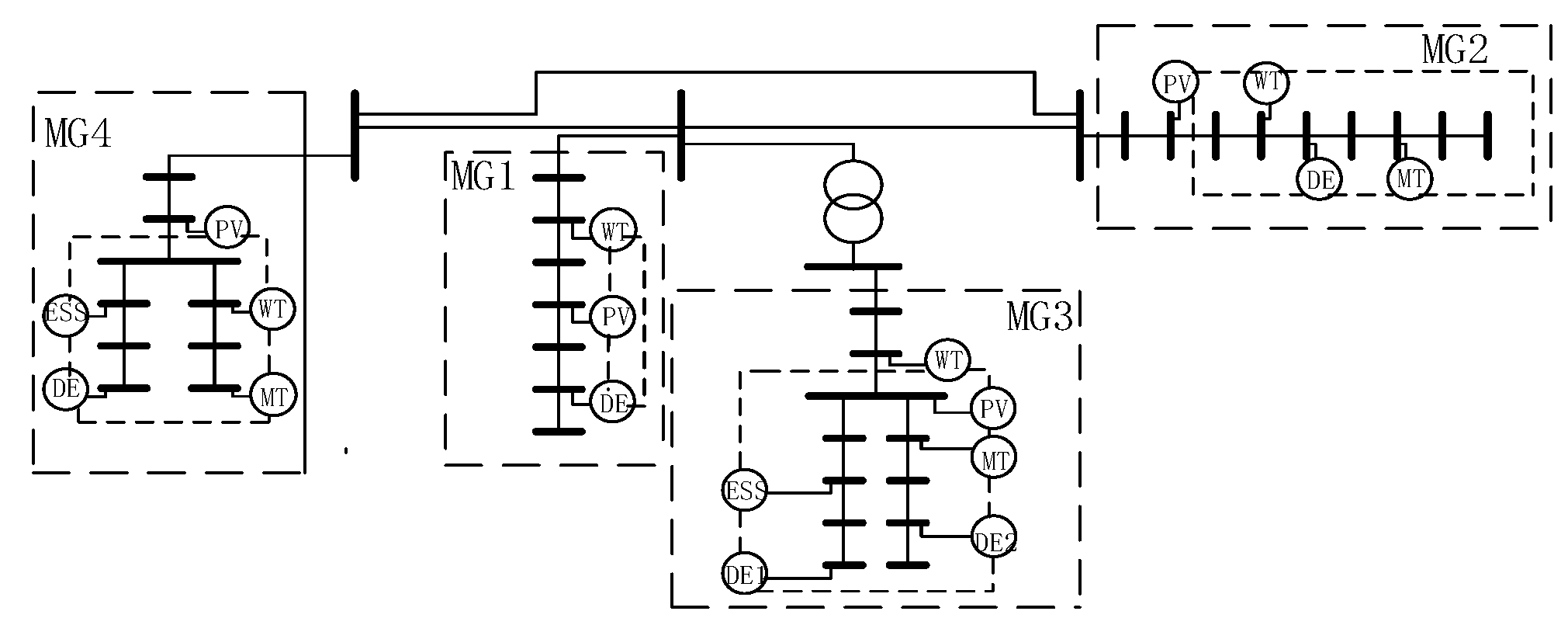
Through data processing, the microgrids during the time periods of 10:00–12:00 and 18:00–21:00 are either converted into virtual load or virtual power. The multi-microgrid system corresponding to the two peak periods is shown in
Figure 6.
Referring to the standard data of the IEEE 4 node system, the line parameters of multi-microgrid system are shown in
Table 3 and
Table 4.
All the parameters in the
Table 3 and
Table 4 are per unit value. Nodes 1–4 represent the PCC nodes connected by microgrids 1–4. R and X represent the resistance and reactance between node
i and node
j, respectively;
k represents the per unit ratio of the transformer, and
represent its upper and lower limits.
In the multi-microgrid system, the node with the maximum
PGimax is selected as the balance node, and the data in
Table 1 and
Table 2 are used to calculate OPF based on second-order cone programming. The final results are shown in
Table 5 and
Table 6.
Using the data in
Table 5 and
Table 6, the value of the objective function that gives the minimum value of network loss can be calculated. By solving the OPF, the active power of virtual power corresponding to the output power of the microgrid and the network loss are obtained.
Using scheme one described in
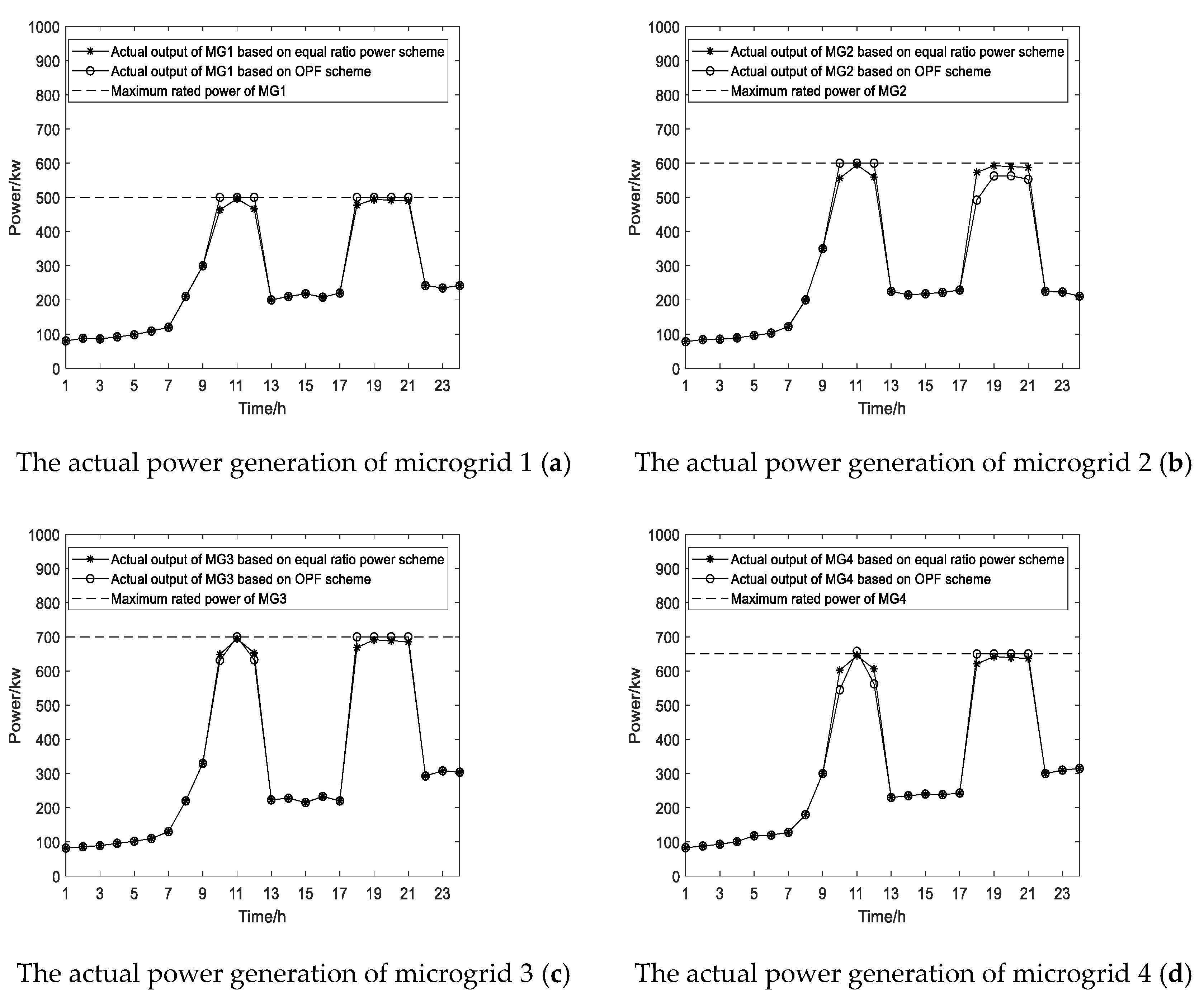
Section 3.1, after allocating the power of each microgrid in the upper based on the equal ratio power consensus algorithm, the actual generation power of each microgrid for 24 hours is obtained. The comparison results with the OPF scheme based on second-order cone programming in scheme two are shown in
Figure 7.
The corresponding network losses of the two schemes between 10:00 and 12:00 and 18:00 and 21:00 are shown in
Table 7 and
Table 8.
It can be observed from
Figure 7a,b that during the 10:00–12:00 period, based on the OPF scheme, microgrids 1 and 2 as power purchasers achieved the maximum power generation and resource utilization. By using the equal ratio scheme, the power distribution of each microgrid is realized under the condition of the power balancing of each microgrid in the multi-microgrid system. However, as power purchasers, the power output of microgrids 1 and 2 is not maximized, which means that the power needed to be purchased from other microgrids will increase, resulting in a more significant network loss. It can be concluded from the data shown in
Table 7 and
Table 8 that the network loss obtained using the equal ratio power scheme is higher than that using the OPF scheme.
As shown in
Figure 7c,d, during 18:00–21:00, under the condition of power balancing of each microgrid in the multi-microgrid system, the OPF scheme results in optimal energy mutual aid economic dispatch of each microgrid while minimizing the energy mutual aid network loss of each microgrid. As power purchasers, microgrids 3 and 4 achieve maximum power and resource utilization. According to the data shown in
Table 7 and
Table 8, the network loss obtained using the OPF scheme is lower than that based on the equal ratio power scheme.
Based on the above discussion, it can be concluded that in the islanded multi-microgrid system, the OPF scheme based on second-order cone programming can reduce the loss of each microgrid occurring during the process of energy exchange. In addition, it can also achieve the optimal power coordination distribution and power balance of each microgrid.
6.2. Economic Dispatch of Distributed Generators in the Lower Layer Microgrid
The actual generating power of each microgrid can be obtained when the energy exchange of each microgrid in the upper layer is complete. At this time, the economic cost in each microgrid is taken as the target, and it is optimized using the consensus algorithm of equal cost increase rate.
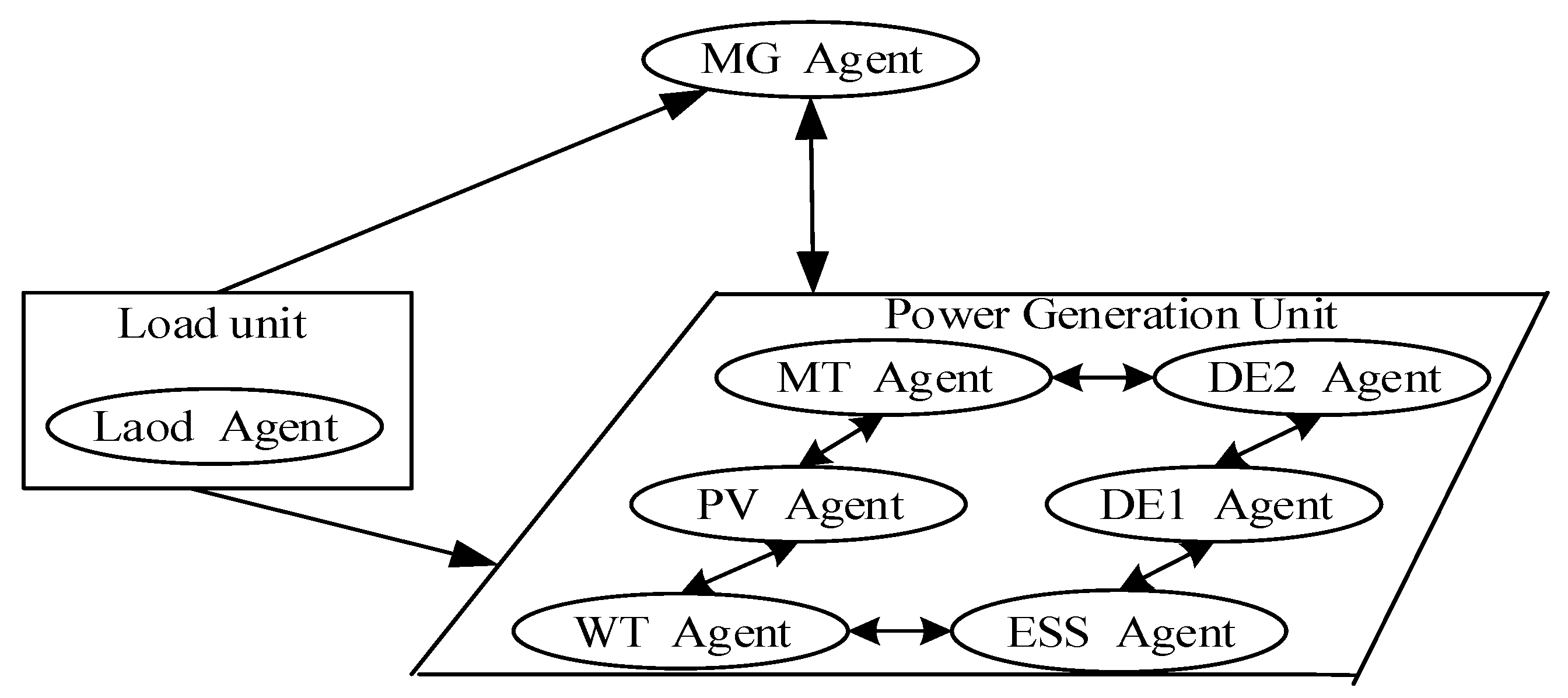
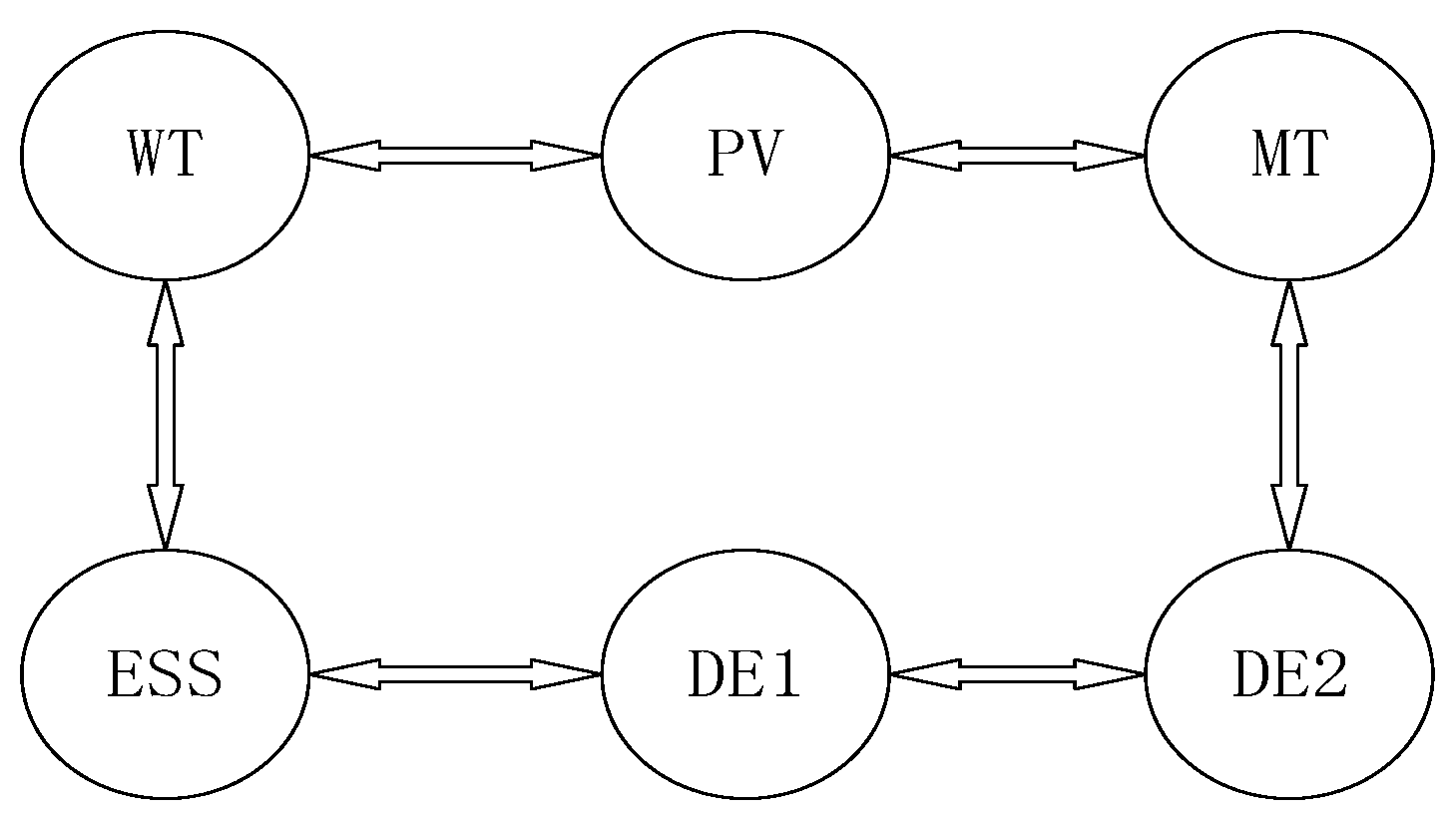
Taking the microgrid 3 as an example, the communication topology of its distributed generators is shown in
Figure 8.
The generation cost coefficient and upper and lower generation limits of each distributed generator are shown in
Table 9. In the following, three different operating scenarios are considered.
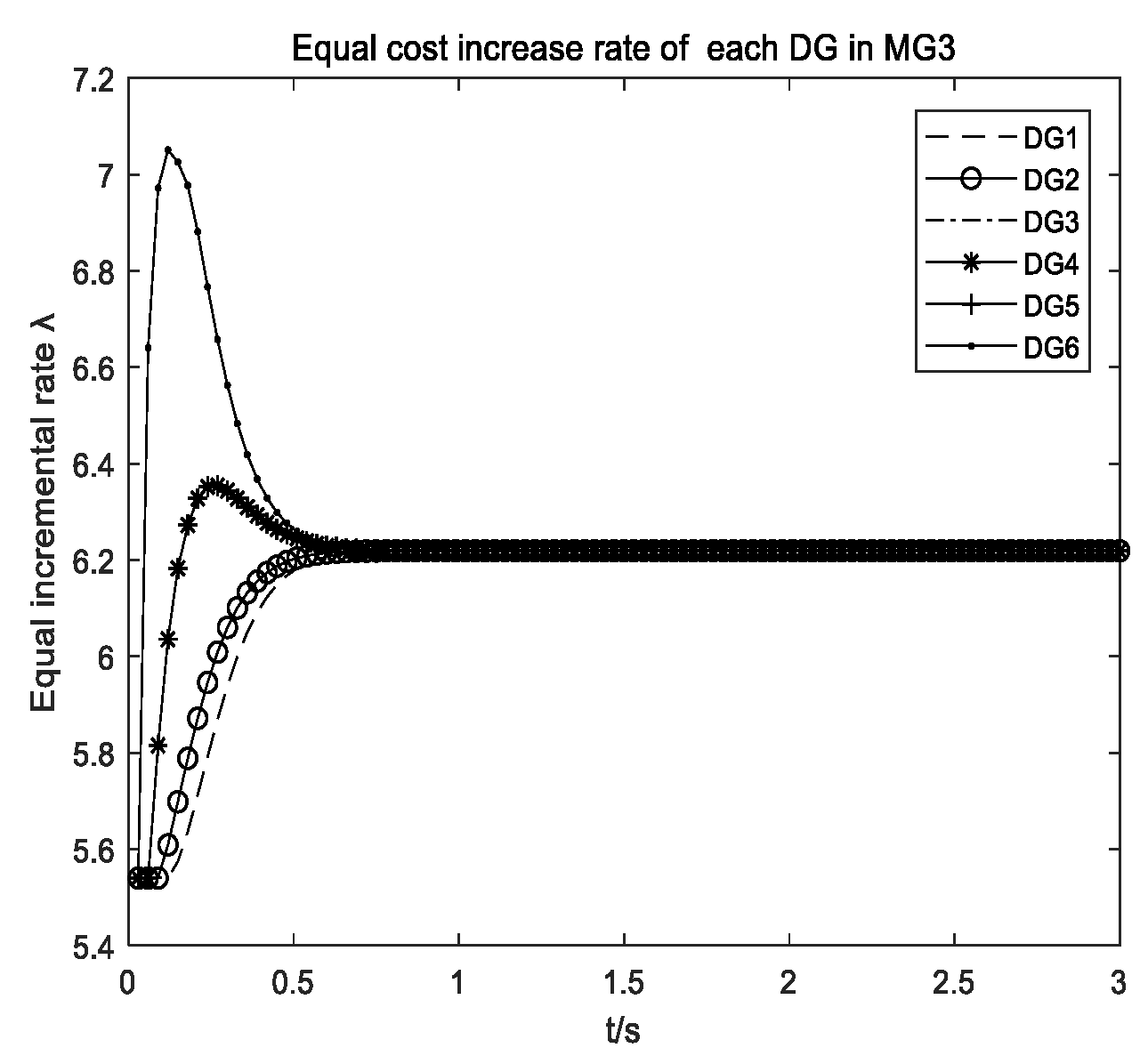
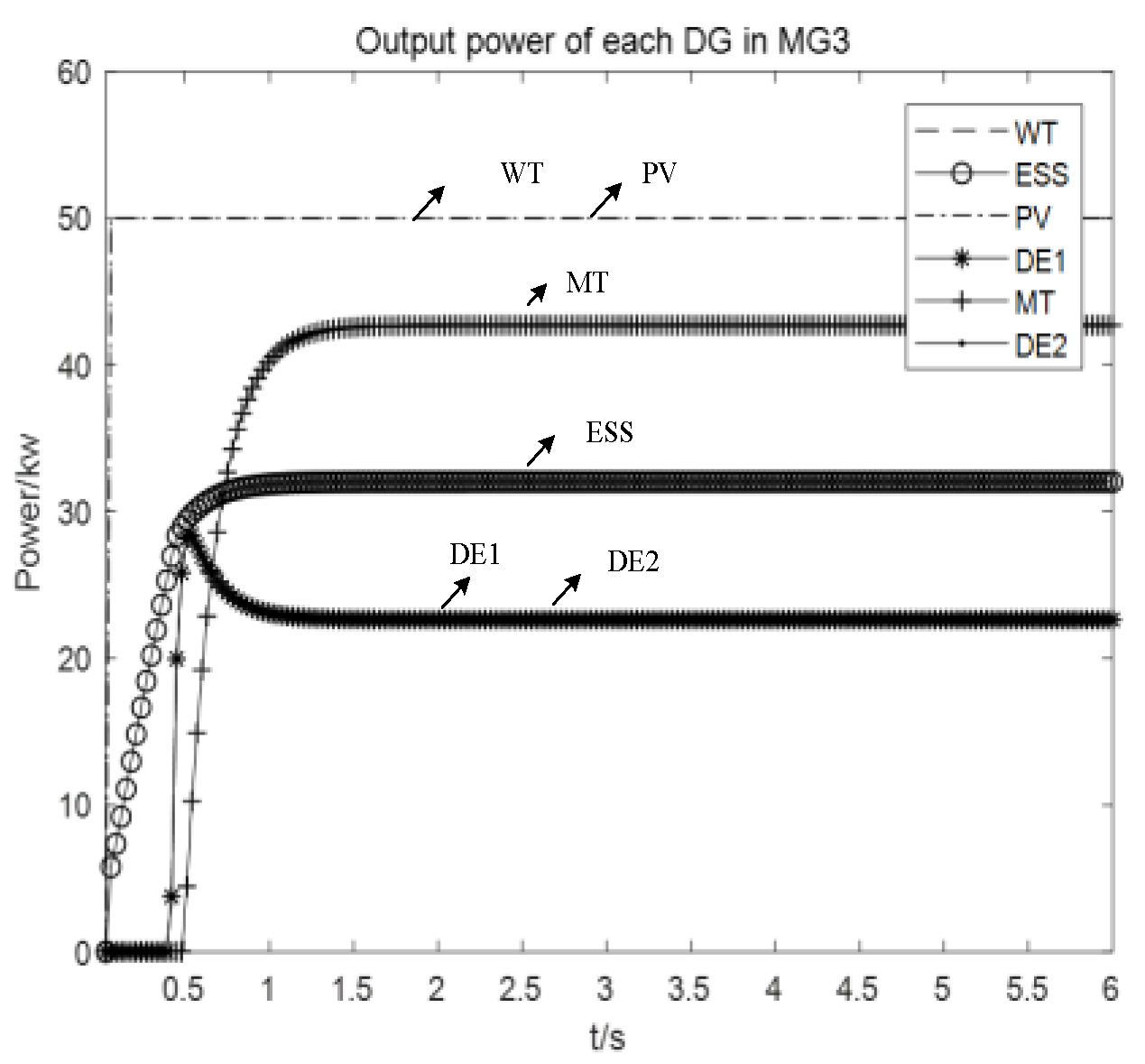
(1) Microgrid 3 and Distributed Generators Operating Normally
The power demand of microgrid 3 is 220 kW at 8:00. When all the distributed generators in the network are working regularly, simulation results obtained using the consensus algorithm based on equal cost increase rate are shown in
Figure 9 and
Figure 10.
It can be observed from
Figure 9 that the equal cost increase rate of each DG converges to the same value at 0.8 s. In
Figure 10, the output powers of the DGs after convergence at 0.8 s are equal to 53.0414, 30.7982, 30.7982, 30.7982, 53.0414, and 21.5226 kW, while the total power is 220 kW, which satisfies the power balancing constraint. The economic state of microgrid 3 is the optimum at this time.
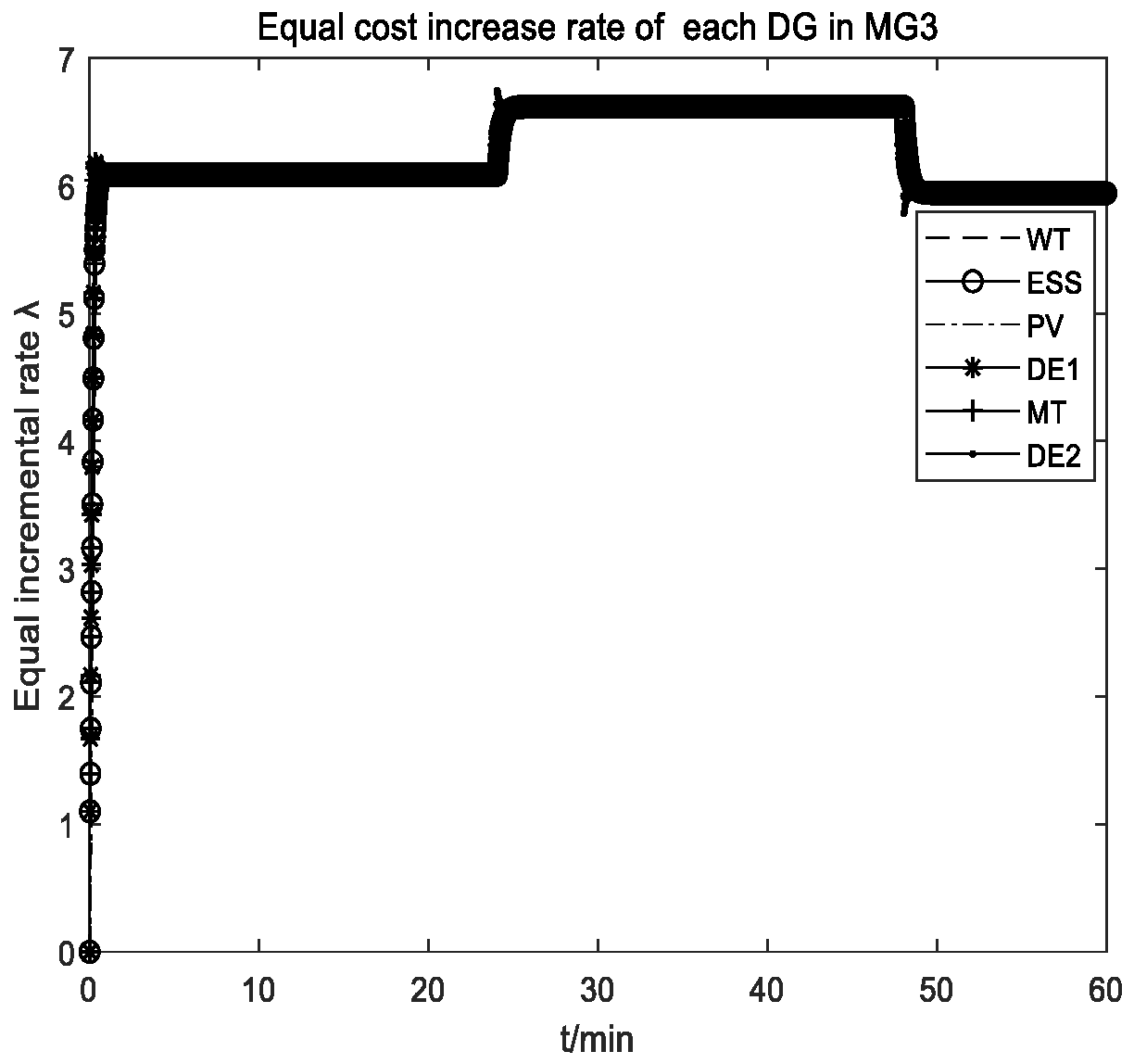
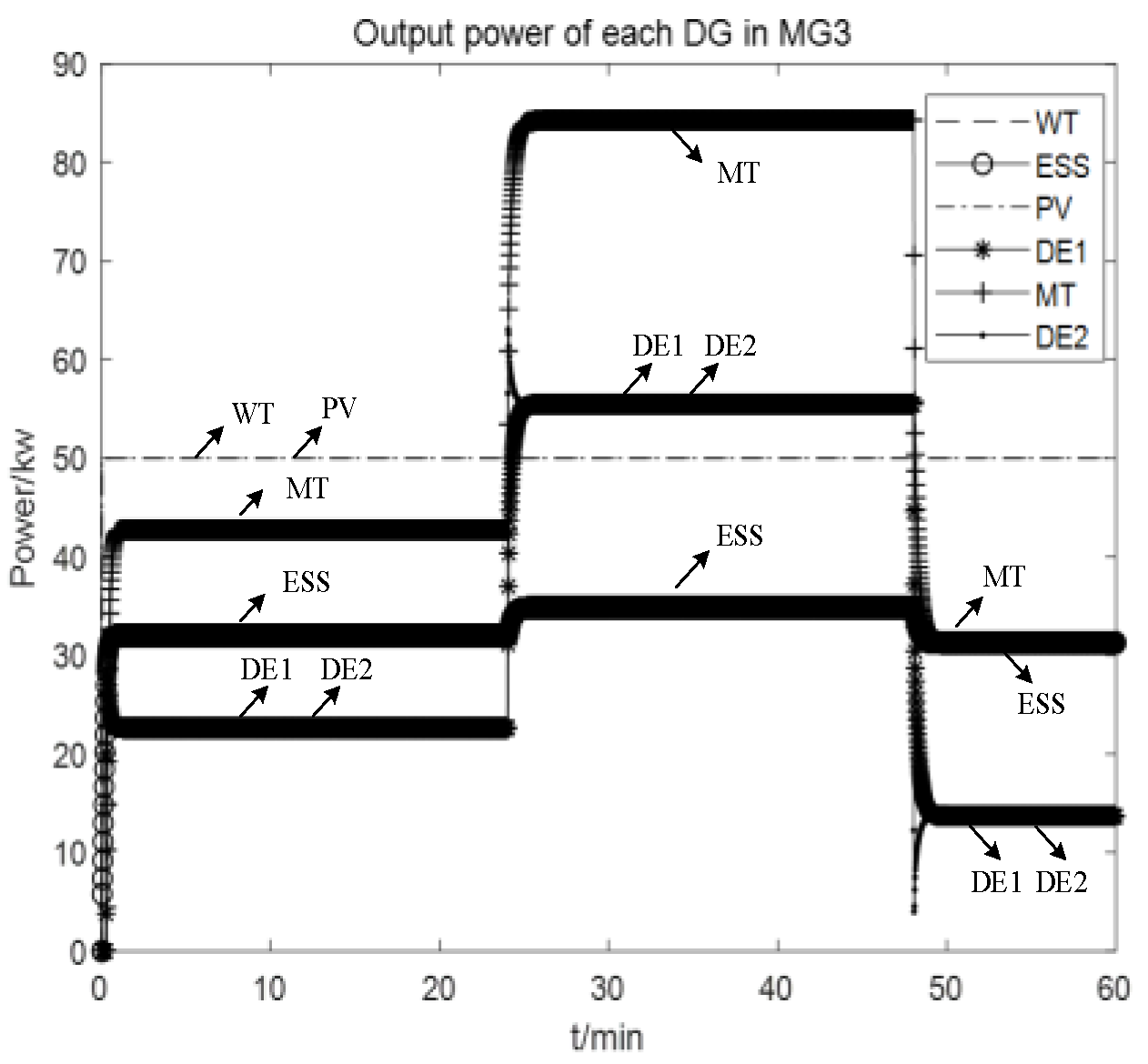
(2) Fluctuation of load demand in MG3
From 8:00 to 9:00, the load demand of MG3 fluctuates from 220 to 330 kW, then from 330 to 190 kW. Based on the consensus algorithm of equal cost increase rate, the output power of each distributed generator becomes stable again. The simulation results are shown in
Figure 11 and
Figure 12.
It can be observed from the simulation results that when the load demand power of microgrid 3 increases from 220 to 330 kW at 8:25, the distributed generators in the microgrid will adjust according to the updated information of the load demand and the equal cost increase rate converges again in 1.5 s. The output powers of distributed generators after achieving balance are 74.8493, 48.0291, 48.0291, 48.0291, 74.8493, and 36.2143 kW, while the total power is 330kW, which meets the power balancing constraint. When the load demand power of microgrid 3 drops from 330 to 190 kW at 8:48, the distributed generators in the microgrid will adjust according to the updated information of the load demand, and the equal cost increase rate converges again. The output powers of distributed generators after achieving balance are 50, 31.2715, 50, 13.6776, 31.3733, and 13.6776 kW, meeting the power balancing constraint. Therefore, load fluctuation in MG3 is suppressed, and the adverse influence of its on multi-microgrid system is reduced.
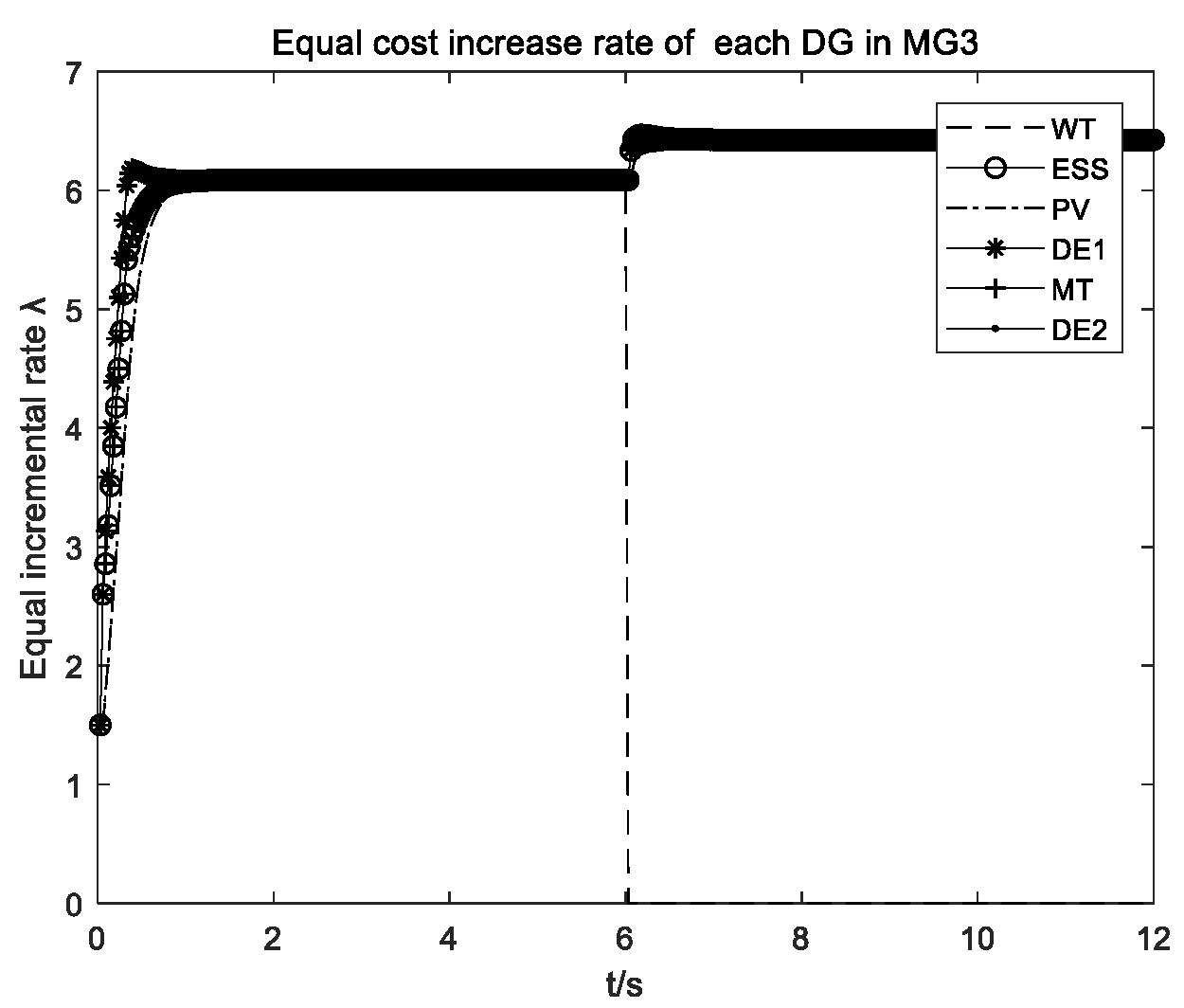
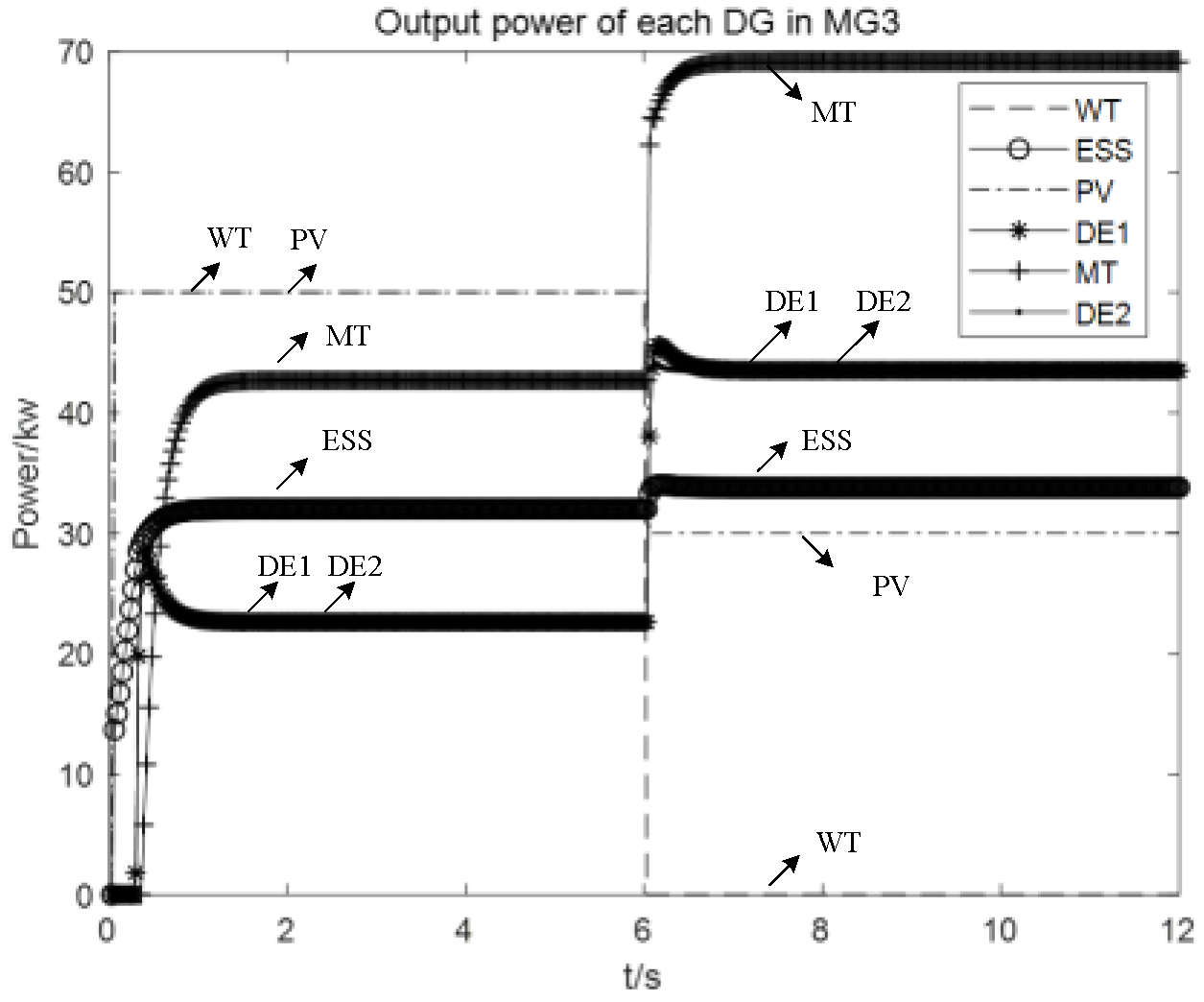
(3) The Output Power of PV Reduced, Exit of WT from Network Topology Due to Failure
From 8:00 to 9:00, the power demand of microgrid 3 is 220 kW. At some point,
PV power drops from 50 to 30 kW due to insufficient light intensity and a fault occurs in WT. The power demand of the microgrid 3 is 220 kW at 8:00. When the running state of microgrid 3 is stable, DG1 exits the network topology due to malfunction, and the corresponding simulation results are shown in
Figure 13 and
Figure 14.
Based on the simulation results, it can be concluded that when the wind turbine exits the network topology, the corresponding equal cost increase rate and output power become zero. The remaining five distributed generators exchange information, and the equal incremental rate converges within 0.6s. The output power of each DG after achieving stability is 41.1613, 41.1613, 41.1613, 66.1574 and 30.3587 kW, while the total power is 220 kW, which meets the power balance constraint. Therefore, the uncertainty of wind and solar output in microgrid 3 is also suppressed, and the adverse influence of its on multi-microgrid system is greatly reduced.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}