A Framework for Flexible and Cost-Efficient Retrofit Measures of Heat Exchanger Networks



Abstract
1. Introduction
2. Theoretical Background
2.1. (Structural) Flexibility Analysis
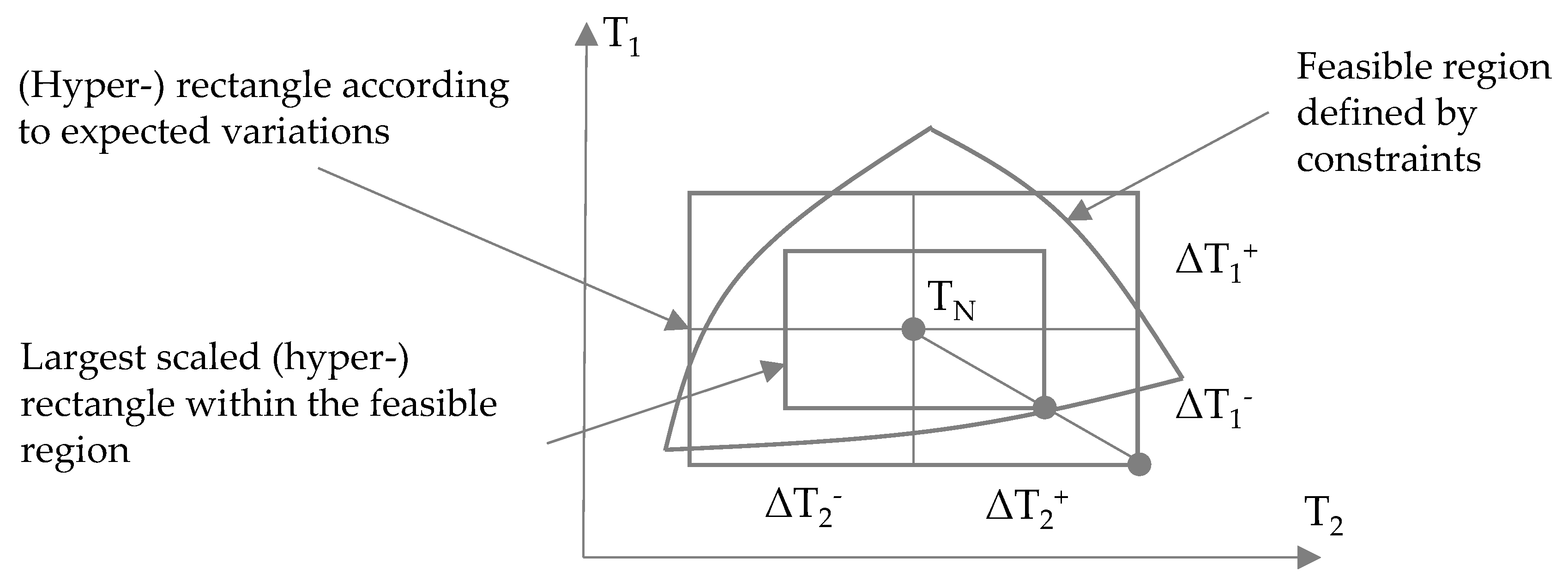
2.2. Multi-Period Design Problem and Critical Point Analysis
“The main idea is to identify points with the largest values of design variables at optimum objective function. This may be achieved by maximizing design variables one by one, while allowing uncertain parameters to obtain any value between the specified bounds, and simultaneously minimizing cost function.”[44] (p. 1607)
- The Karush–Kuhn–Tucker (KKT-) formulation;
- The two-level formulation; and
- The approximate one-level formulation.
3. Methodology
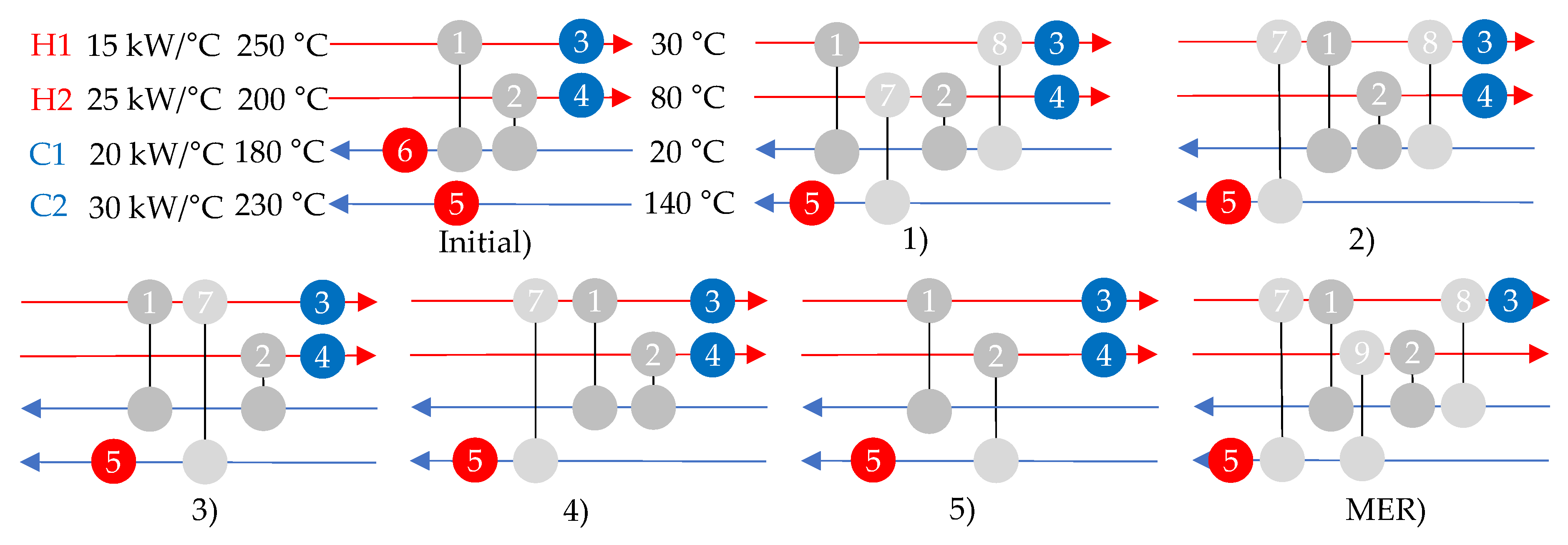
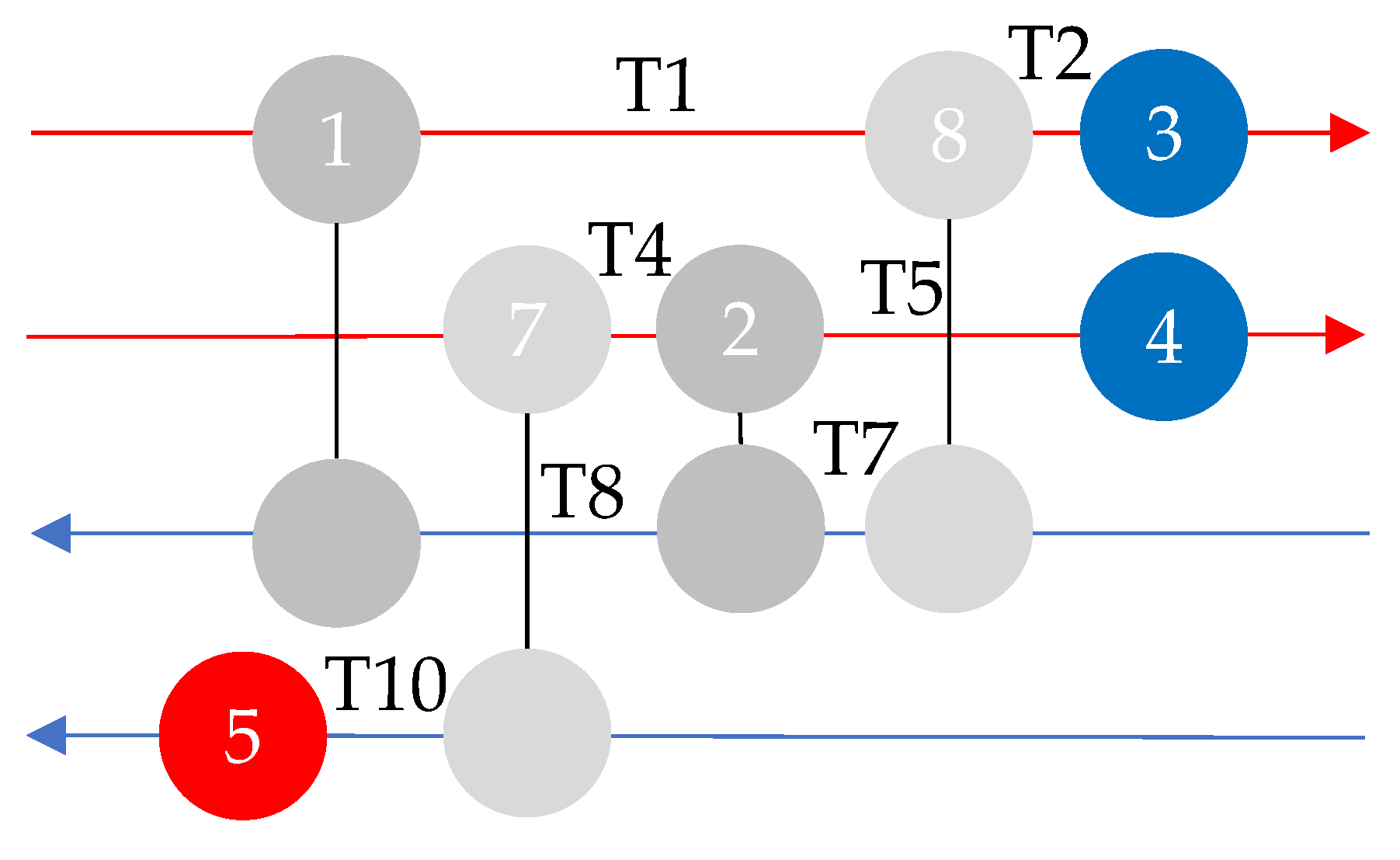
3.1. HEN Retrofit Design Proposals for Single Operating Point—Generation of Superstructure
3.2. Structural Feasibility Assessment—Reduction of Superstructure
3.3. Determination of Critical Points
3.4. Multi-Period Design Problem for Reduced Superstructure
3.5. Feasibility Check
4. Illustrative Example
4.1. Structural Feasibility Assessment
4.2. Economic Data and Identification of Critical Points
- Investment cost for a new HEX: ;
- Investment cost for increasing an existing HEX: ;
- Operational cost for utility cooling: ; and
- Operational cost for utility heating: .
4.3. Solution of the Multi-Period Design Problem and Final Feasibility Check
4.4. Discussion of the Results of the Illustrative Example
5. Conclusions
- Development of a novel framework to achieve flexible and cost-efficient retrofit measures for HENs operating at multiple periods;
- Implementation of critical point analysis in a retrofitting framework to achieve flexible retrofit solutions of HENs;
- Possibility to employ well-proven, single-period retrofit design methods, e.g., advanced composite curves, Bridge analysis, etc., but also “experience-based” retrofit design proposals in a framework that guarantees flexibility and cost efficiency (with respect to investment and operating cost) for the entire operating period;
- Possibility to compare design proposals of different single-period retrofit design methods in a superstructure-based mathematical program ensuring flexibility and cost efficiency with respect to investment and operating cost;
- Automatization of the KKT-formulation, the two-level formulation, and the set-covering algorithm initially suggested by Pintarič and Kravanja [44] to identify critical points of different design proposals (see Supplementary Material); and
- Extension of the set covering algorithm suggested by Pintarič and Kravanja [44] in order to handle more complex network structures (see Appendix A).
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Discussion on the Determination of Critical Points
Appendix A.1. Two-Level Formulation
- The lower (control-design) level problem; and
- The upper (uncertainty) level problem.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Variables | Critical Points (Read as Follows) [Tin,H1, Tin,H2, Tin,C1, Tin,C2, FcpH1, FcpH2, FcpC1, FcpC2] with T in [°C] and Fcp in [kW/°C] | Total Annualized Cost [€/y] | Flexibility Index [-] |
|---|---|---|---|
| Q3, Q4 | [240.0, 190.0, 19.0, 165.0, 20.0, 20.0, 20.8, 28.0] [255.0, 190.0, 21.0, 165.0, 20.0, 30.0, 19.2, 28.0] | 221,400 | 0.69 |
| Q3, Q5 | [240.0, 190.0, 21.0, 120.0, 10.0, 0, 20.8, 32.0] [255.0, 190.0, 21.0, 165.0, 20.0, 0, 20.8, 28.0] [0, 190.0, 21.0, 120.0, 20.0, 0, 20.8, 32.0] | 218,600 | 0.5 |
| Q4, Q5 | [240.0, 190.0, 21.0, 120.0, 10.0, 30.0, 19.2, 32.0] [240.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] | 250,000 | 1.00 |
| Control Variables | Critical Points (Read as Follows) [Tin,H1, Tin,H2, Tin,C1, Tin,C2, FcpH1, FcpH2, FcpC1, FcpC2] with T in [°C] and Fcp in [kW/°C] | Total Annualized Cost [€/y] | Flexibility Index [-] | Convergence between Upper and Lower Problem |
|---|---|---|---|---|
| Q4, Q5, Q6 | [240.0, 190.0, 19.0, 120.0, 20.0, 30.0, 20.8, 32.0] [240.0, 190.0, 19.0, 120.0, 20.0, 20.0, 20.8, 32.0] [255.0, 190.0, 21.0, 120.0, 20.0, 0, 19.2, 32.0] | 227,200 | 0.92 | Not converged (30 iterations) for some design variables |
| Q4, Q6, T8 | [240.0, 190.0, 19.0, 120.0, 20.0, 20.0, 20.8, 32.0] [255.0, 190.0, 19.0, 120.0, 20.0, 20.0, 19.2, 32.0] | 227,200 | 0.92 | converged |
| Q6, T2, T8 | [240.0, 190.0, 21.0, 120.0, 20.0, 0, 20.8, 32.0] [255.0, 190.0, 21.0, 120.0, 20.0, 0, 19.2, 32.0] | 227,200 | 0.92 | converged |
| T1, T4, T7 | [240.0, 210.0, 19.0, 165.0, 10.0, 30.0, 20.8, 28.0] [255.0, 210.0, 19.0, 165.0, 20.0, 30.0, 20.8, 28.0] | 227,200 | 0.92 | converged |
- Ratio between the number of process streams and the number of process-to-process HEX: The higher this number, the less complex the HEN; and
- Number of process-to-process HEX connected to a single process stream: The higher this number, the more complex the HEN.
Appendix A.2. A Karush–Kuhn–Tucker (KKT-)Formulation
| Proposal Number | Critical Points (Read as Follows) [Tin,H1, Tin,H2, Tin,C1, Tin,C2, FcpH1, FcpH2, FcpC1, FcpC2] with T in [°C] and Fcp in [kW/°C] | Total Annualized Cost [€/y] | Flexibility Index [-] |
|---|---|---|---|
| MER | [240.0, 190.0, 21.0, 120.0, 20.0, 0, 20.8, 32.0] [255.0, 0, 21.0, 165.0, 20.0, 30.0, 19.2, 28.0] [240.0, 210.0, 21.0, 120.0, 0, 30.0, 19.2, 32.0] [0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] | 202,000 | 0.75 |
Appendix A.3. Adding Critical Points via Flexibility Assessment
Appendix B
| Tin,H1 [°C] | Tin,H2 [°C] | Tin,HC1 [°C] | Tin,C2 [°C] | FcpH1 [kW/°C] | FcpH2 [kW/°C] | FcpC1 [kW/°C] | FcpC2 [kW/°C] | Ws [-] |
|---|---|---|---|---|---|---|---|---|
| 243.65 | 208.10 | 19.59 | 155.49 | 15.44 | 23.23 | 20.14 | 28.60 | 1/11 |
| 249.72 | 202.83 | 20.29 | 156.26 | 16.14 | 21.22 | 19.87 | 29.51 | 1/11 |
| 246.41 | 202.73 | 20.34 | 162.06 | 16.50 | 28.27 | 20.49 | 29.59 | 1/11 |
| 248.81 | 194.63 | 20.04 | 133.91 | 16.40 | 25.15 | 20.23 | 31.24 | 1/11 |
| 249.82 | 202.35 | 20.76 | 136.65 | 12.00 | 27.33 | 19.72 | 31.40 | 1/11 |
| 247.16 | 200.40 | 19.21 | 124.26 | 14.96 | 25.44 | 19.88 | 30.61 | 1/11 |
| 248.18 | 200.50 | 20.56 | 158.58 | 19.83 | 24.80 | 20.51 | 28.78 | 1/11 |
| 242.30 | 206.05 | 19.89 | 157.40 | 11.83 | 22.99 | 19.61 | 30.97 | 1/11 |
| 244.50 | 207.36 | 19.13 | 160.11 | 14.09 | 25.36 | 19.99 | 30.75 | 1/11 |
| 248.71 | 204.38 | 20.02 | 140.01 | 13.03 | 20.93 | 20.18 | 30.28 | 1/11 |
| 253.53 | 191.07 | 19.39 | 127.44 | 12.99 | 27.18 | 20.29 | 30.82 | 1/11 |
| Proposal Number | Critical Points (Read as Follows) [Tin,H1, Tin,H2, Tin,C1, Tin,C2, FcpH1, FcpH2, FcpC1, FcpC2] with T in [°C] and Fcp in [kW/°C] |
|---|---|
| 1) | [240.0, 190.0, 21.0, 120.0, 10.0, 20.0, 20.8, 32.0] |
| [255.0, 210.0, 19.0, 120.0, 10.0, 30.0, 20.8, 32.0] | |
| [240.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] | |
| 2) | [240.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] |
| [240.0, 190.0, 19.0, 120.0, 20.0, 20.0, 20.8, 32.0] | |
| [255.0, 190.0, 19.0, 165.0, 20.0, 20.0, 19.2, 28.0] | |
| [255.0, 190.0, 19.0, 165.0, 0, 20.0, 20.8, 28.0] | |
| 3) | [240.0, 190.0, 21.0, 120.0, 10.0, 20.0, 20.8, 28.0] |
| [240.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 28.0] | |
| [255.0, 190.0, 0, 120.0, 20.0, 20.0, 20.8, 28.0] | |
| 4) | [240.0, 190.0, 21.0, 120.0, 20.0, 20.0, 20.8, 32.0] |
| [240.0, 190.0, 19.0, 0, 10.0, 20.0, 20.8, 0] | |
| [255.0, 190.0, 0, 165.0, 20.0, 20.0, 19.2, 28.0] | |
| MER) | [255.0, 190.0, 21.0, 165.0, 20.0, 30.0, 19.2, 28.0] |
| [255.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] | |
| [240.0, 190.0, 21.0, 120.0, 20.0, 20.0, 20.8, 32.0] | |
| [240.0, 210.0, 21.0, 120.0, 10.0, 30.0, 19.2, 32.0] | |
| [255.0, 210.0, 21.0, 165.0, 20.0, 30.0, 19.2, 28.0] | |
| [240.0, 190.0, 21.0, 120.0, 20.0, 30.0, 20.8, 32.0] | |
| [240.0, 210.0, 21.0, 120.0, 20.0, 30.0, 19.2, 32.0] | |
| [240.0, 190.0, 19.0, 120.0, 10.0, 20.0, 20.8, 32.0] |
| HEX | ΔUA [kW/°C] | ΔA [m2] |
|---|---|---|
| 1 | 13.58 | 25.97 |
| 2 | 1.02 | 1.95 |
| 7 | 77.81 | 148.77 |
| 8 | 9.94 | 19.01 |
| HEX | ΔUA [kW/°C] | ΔA [m2] |
|---|---|---|
| 1 | 0.0 | 0.0 |
| 2 | 26.5 | 50.67 |
| 7 | 26.59 | 50.84 |
| 8 | 19.35 | 37.0 |
| HEX | ΔUA [kW/°C] | ΔA [m2] |
|---|---|---|
| 1 | 74.87 | 143.16 |
| 2 | 39.71 | 75.93 |
| 7 | 57.59 | 110.11 |
| HEX | ΔUA [kW/°C] | ΔA [m2] |
|---|---|---|
| 1 | 74.87 | 143.16 |
| 2 | 20.04 | 38.32 |
| 7 | 24.69 | 47.21 |
| HEX | ΔUA [kW/°C] | ΔA [m2] |
|---|---|---|
| 1 | 26.71 | 51.07 |
| 2 | 103.96 | 198.78 |
| 7 | 33.22 | 63.51 |
| 8 | 9.57 | 18.30 |
| 9 | 89.36 | 170.85 |
| Parameter | Value |
|---|---|
| Initial temperature | 10 K |
| Final temperature | 2 × 10−20 K |
| Annealing of temperature | 0.974*T |
| Stop criterion | No improvement after 2000 iterations |

References
- Linnhoff, B.; Hindmarsh, E. The pinch design method for heat exchanger networks. Chem. Eng. Sci. 1983, 38, 745–763. [Google Scholar] [CrossRef]
- Floudas, C.A.; Ciric, A.R.; Grossmann, I.E. Automatic synthesis of optimum heat exchanger network configurations. AIChE J. 1986, 32, 276–290. [Google Scholar] [CrossRef]
- Yee, T.F.; Grossmann, I.E. Simultaneous optimization models for heat integration. II. Heat exchanger network synthesis. Comput. Chem. Eng. 1990, 14, 1165–1184. [Google Scholar] [CrossRef]
- Jiang, N.; Bao, S.; Gao, Z. Heat Exchanger Network Integration Using Diverse Pinch Point and Mathematical Programming. Chem. Eng. Technol. 2011, 34, 985–990. [Google Scholar] [CrossRef]
- Axelsson, E.; Olsson, M.R.; Berntsson, T. Heat integration opportunities in average Scandinavian kraft pulp mills: Pinch analyses of model mills. Nord. Pulp Pap. Res. J. 2006, 21, 466–475. [Google Scholar] [CrossRef]
- Bengtsson, C.; Nordman, R.; Berntsson, T. Utilization of excess heat in the pulp and paper industry—A case study of technical and economic opportunities. Appl. Therm. Eng. 2002, 22, 1069–1081. [Google Scholar] [CrossRef]
- Escobar, M.; Trierweiler, J.O. Optimal heat exchanger network synthesis: A case study comparison. Appl. Therm. Eng. 2013, 51, 801–826. [Google Scholar] [CrossRef]
- Persson, J.; Berntsson, T. Influence of seasonal variations on energy-saving opportunities in a pulp mill. Energy 2009, 34, 1705–1714. [Google Scholar] [CrossRef]
- Kang, L.; Liu, Y. Synthesis of flexible heat exchanger networks: A review. Chin. J. Chem. Eng. 2019, 27, 1485–1497. [Google Scholar] [CrossRef]
- Kotjabasakis, E.; Linnhoff, B. Sensitivity tables for the design of flexible processes (1)—How much contingency in heat exchanger networks is cost-effective? Chem. Eng. Res. Des. 1986, 64, 197–211. [Google Scholar]
- Hafizan, A.M.; Klemeš, J.J.; Alwi, S.R.W.; Manan, Z.A.; Hamid, M.K.A. Temperature disturbance management in a heat exchanger network for maximum energy recovery considering economic analysis. Energies 2019, 12, 594. [Google Scholar] [CrossRef]
- Linnhoff, B.; Vredeveld, D.R. Pinch Technology Has Come of Age. Chem. Eng. Prog. 1984, 80, 33–40. [Google Scholar]
- Floudas, C.A.; Grossmann, I.E. Synthesis of flexible heat exchanger networks for multiperiod operation. Comput. Chem. Eng. 1986, 10, 153–168. [Google Scholar] [CrossRef]
- Floudas, C.A.; Grossmann, I.E. Automatic generation of multiperiod heat exchanger network configurations. Comput. Chem. Eng. 1987, 11, 123–142. [Google Scholar] [CrossRef]
- Floudas, C.A.; Grossmann, I.E. Synthesis of flexible heat exchanger networks with uncertain flowrates and temperatures. Comput. Chem. Eng. 1987, 11, 319–336. [Google Scholar] [CrossRef]
- Aaltola, J. Simultaneous synthesis of flexible heat exchanger network. Appl. Therm. Eng. 2002, 22, 907–918. [Google Scholar] [CrossRef]
- Verheyen, W.; Zhang, N. Design of flexible heat exchanger network for multi-period operation. Chem. Eng. Sci. 2006, 61, 7730–7753. [Google Scholar] [CrossRef]
- Short, M.; Isafiade, A.J.; Fraser, D.M.; Kravanja, Z. Two-step hybrid approach for the synthesis of multi-period heat exchanger networks with detailed exchanger design. Appl. Therm. Eng. 2016, 105, 807–821. [Google Scholar] [CrossRef]
- Tveit, T.M.; Aaltola, J.; Laukkanen, T.; Laihanen, M.; Fogelholm, C.J. A framework for local and regional energy system integration between industry and municipalities-Case study UPM-Kymmene Kaukas. Energy 2006, 31, 2162–2175. [Google Scholar] [CrossRef]
- Lai, Y.Q.; Manan, Z.A.; Alwi, S.R.W. Simultaneous diagnosis and retrofit of heat exchanger network via individual process stream mapping. Energy 2018, 155, 1113–1128. [Google Scholar] [CrossRef]
- Kamel, D.A.; Gadalla, M.A.; Abdelaziz, O.Y.; Labib, M.A.; Ashour, F.H. Temperature driving force (TDF) curves for heat exchanger network retrofit—A case study and implications. Energy 2017, 123, 283–295. [Google Scholar] [CrossRef]
- Bonhivers, J.C.; Srinivasan, B.; Stuart, P.R. New analysis method to reduce the industrial energy requirements by heat-exchanger network retrofit: Part 1—Concepts. Appl. Therm. Eng. 2017, 119, 659–669. [Google Scholar] [CrossRef]
- Ciric, A.R.; Floudas, C.A. A comprehensive optimization model of the heat exchanger network retrofit problem. Heat Recovery Syst. CHP 1990, 10, 407–422. [Google Scholar] [CrossRef]
- Asante, N.D.K.; Zhu, X.X. An automated and interactive approach for heat exchanger network retrofit. Chem. Eng. Res. Des. 1997, 75, 349–360. [Google Scholar] [CrossRef]
- Athier, G.; Floquet, P.; Pibouleau, L.; Domenech, S. A mixed method for retrofiting heat-exchanger networks. Comput. Chem. Eng. 1998. [Google Scholar] [CrossRef]
- Smith, R.; Jobson, M.; Chen, L. Recent development in the retrofit of heat exchanger networks. Appl. Therm. Eng. 2010, 30, 2281–2289. [Google Scholar] [CrossRef]
- Jiang, N.; Shelley, J.D.; Doyle, S.; Smith, R. Heat exchanger network retrofit with a fixed network structure. Appl. Energy 2014. [Google Scholar] [CrossRef]
- Akpomiemie, M.O.; Smith, R. Retrofit of heat exchanger networks with heat transfer enhancement based on an area ratio approach. Appl. Energy 2016. [Google Scholar] [CrossRef]
- Sreepathi, B.K.; Rangaiah, G.P. Review of Heat Exchanger Network Retrofitting Methodologies and Their Applications. Ind. Eng. Chem. Res. 2014, 53, 11205–11220. [Google Scholar] [CrossRef]
- Persson, J.; Berntsson, T. Influence of short-term variations on energy-saving opportunities in a pulp mill. J. Clean. Prod. 2010, 18, 935–943. [Google Scholar] [CrossRef]
- Kang, L.; Liu, Y. Retrofit of heat exchanger networks for multiperiod operations by matching heat transfer areas in reverse order. Ind. Eng. Chem. Res. 2014, 53, 4792–4804. [Google Scholar] [CrossRef]
- Papalexandri, K.P.; Pistikopoulos, E.N. A Retrofit Design Model for Improving the Operability of Heat Exchanger Networks. In Energy Efficiency in Process Technology; Pilavachi, P.A., Ed.; Springer: Dordrecht, The Netherlands, 1993; pp. 915–928. [Google Scholar]
- Nordman, R.; Berntsson, T. Use of advanced composite curves for assessing cost-effective HEN retrofit I: Theory and concepts. Appl. Therm. Eng. 2009, 29, 275–281. [Google Scholar] [CrossRef]
- Lal, N.S.; Atkins, M.J.; Walmsley, T.G.; Walmsley, M.R.W.; Neale, J.R. Insightful heat exchanger network retrofit design using Monte Carlo simulation. Energy 2019, 181, 1129–1141. [Google Scholar] [CrossRef]
- Langner, C.; Svensson, E.; Harvey, S. Combined Flexibility and Energy Analysis of Retrofit Actions for Heat Exchanger Networks. Chem. Eng. Trans. 2019, 76, 307–312. [Google Scholar] [CrossRef]
- Marselle, D.F.; Morari, M.; Rudd, D.F. Design of resilient processing plants—II Design and control of energy management systems. Chem. Eng. Sci. 1982, 37, 259–270. [Google Scholar] [CrossRef]
- Saboo, A.K.; Morari, M.; Woodcock, D.C. Design of resilient processing plants-VIII. A resilience index for heat exchanger networks. Chem. Eng. Sci. 1985, 40, 1553–1565. [Google Scholar] [CrossRef]
- Swaney, R.E.; Grossmann, I.E. An index for operational flexibility in chemical process design. Part I: Formulation and Theory. AIChE J. 1985, 31, 621–630. [Google Scholar] [CrossRef]
- Grossmann, I.E.; Floudas, C.A. Active constraint strategy for flexibility analysis in chemical processes. Comput. Chem. Eng. 1987, 11, 675–693. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Zhao, Z.; Yao, P. Efficient Method for Flexibility Analysis of Large-Scale Nonconvex Heat Exchanger Networks. Ind. Eng. Chem. Res. 2015, 54, 10757–10767. [Google Scholar] [CrossRef]
- Zhao, F.; Chen, X. Analytical and triangular solutions to operational flexibility analysis using quantifier elimination. AIChE J. 2018, 64, 3894–3911. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Zhao, Z.; Yao, P. Structure and area optimization of flexible heat exchanger networks. Ind. Eng. Chem. Res. 2014, 53, 11779–11793. [Google Scholar] [CrossRef]
- Pintarič, Z.N.; Kasaš, M.; Kravanja, Z. Sensitivity Analyses for Scenario Reduction in Flexible Flow Sheet Design with a Large Number of Uncertain Parameters. AIChE J. 2013, 59, 2862–2871. [Google Scholar] [CrossRef]
- Pintarič, Z.N.; Kravanja, Z. Identification of critical points for the design and synthesis of flexible processes. Comput. Chem. Eng. 2008, 32, 1603–1624. [Google Scholar] [CrossRef]
- Pintarič, Z.N.; Kravanja, Z. A methodology for the synthesis of heat exchanger networks having large numbers of uncertain parameters. Energy 2015, 92, 373–382. [Google Scholar] [CrossRef]
- Kachacha, C.; Zoughaib, A.; Tran, C.T. A methodology for the flexibility assessment of site wide heat integration scenarios. Energy 2018, 154, 231–239. [Google Scholar] [CrossRef]
- Pettersson, F. Heat exchanger network design using geometric mean temperature difference. Comput. Chem. Eng. 2008, 32, 1726–1734. [Google Scholar] [CrossRef]



| Proposal Number | Hot Utility Demand [kW] (at Average Conditions) | Hot Utility Savings [kW] (at Average Conditions) |
|---|---|---|
| Initial | 2700 | - |
| 1) | 1450 | 1250 |
| 2) | 1900 | 800 |
| 3) | 2000 | 700 |
| 4) | 2000 | 700 |
| 5) | 1450 | 1250 |
| MER) | 750 | 1950 |
| HEX | UA Value [kW/°C] | A [m2] |
|---|---|---|
| 1 | 33.68 | 64.4 |
| 2 | 12.71 | 24.3 |
| Stream | ΔT+ [°C] | ΔT− [°C] | ΔFcp+ [kW/°C] | ΔFcp− [kW/°C] |
|---|---|---|---|---|
| H1 | 5 | 10 | 5 | 5 |
| H2 | 10 | 10 | 5 | 5 |
| C1 | 1 | 1 | 0.8 | 0.8 |
| C2 | 25 | 20 | 2 | 2 |
| Proposal Number | Structural Flexibility Index |
|---|---|
| 1) | 1.47 |
| 2) | 1.47 |
| 3) | 1.0 |
| 4) | 1.0 |
| 5) | 0.07 |
| MER) | 1.18 |
| Utility | Price [€/MWh] |
|---|---|
| Cooling () | 1.7 × 10−3 |
| Heating (): | 15 |
| Proposal Number | Total Annualized Cost [€/y] | Net Savings [€/y] | Flexibility Index [-] |
|---|---|---|---|
| 1) | 228,000 | 86,600 | 1.00 |
| 2) | 237,300 | 77,300 | 1.19 |
| 3) | 250,000 | 64,600 | 1.00 |
| 4) | 262,900 | 51,700 | 1.00 |
| MER) | 223,100 | 91,500 | 1.00 |
| Proposal Number | Total Annualized (Capital) Cost [€/y] | Flexibility Index [-] |
|---|---|---|
| 1) | 19,600 | 1.00 |
| 2) | 19,600 | 1.00 |
| 3) | 37,200 | 1.00 |
| 4) | 37,200 | 1.00 |
| MER) | 95,600 | 1.00 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langner, C.; Svensson, E.; Harvey, S. A Framework for Flexible and Cost-Efficient Retrofit Measures of Heat Exchanger Networks. Energies 2020, 13, 1472. https://doi.org/10.3390/en13061472
Langner C, Svensson E, Harvey S. A Framework for Flexible and Cost-Efficient Retrofit Measures of Heat Exchanger Networks. Energies. 2020; 13(6):1472. https://doi.org/10.3390/en13061472
Chicago/Turabian StyleLangner, Christian, Elin Svensson, and Simon Harvey. 2020. "A Framework for Flexible and Cost-Efficient Retrofit Measures of Heat Exchanger Networks" Energies 13, no. 6: 1472. https://doi.org/10.3390/en13061472
APA StyleLangner, C., Svensson, E., & Harvey, S. (2020). A Framework for Flexible and Cost-Efficient Retrofit Measures of Heat Exchanger Networks. Energies, 13(6), 1472. https://doi.org/10.3390/en13061472