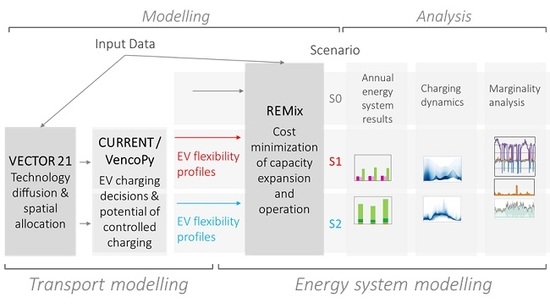
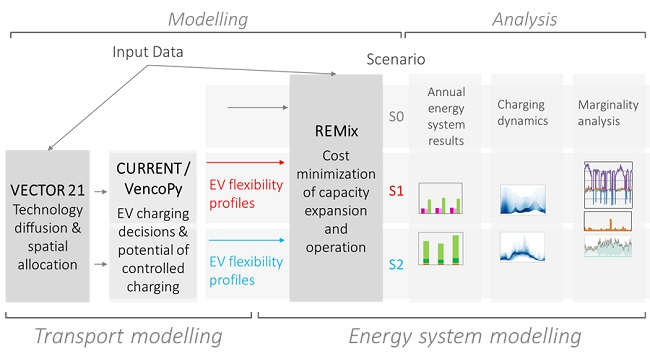
2.1.1. Vehicle Fleet Model (VECTOR21)
The model VECTOR21 (Vehicle Technologies Scenario Model) is a hybrid of an agent based and discrete choice market penetration model that assesses the competition between different powertrain alternatives. It simulates future passenger vehicles’ market shares of powertrain technologies under effects of changing political and technological conditions in an annual resolution. The basis of the simulation is the customer purchase decision. Therefore, different customer profiles (agents) choose a powertrain with the highest perceived value in a predefined framework such as regional policies or energy prices. To calculate each utility, five unique customer preferences are been identified: purchase price, operating cost, range, CO
2-emissions, and maximum vehicle acceleration [
25]. To take into account current market phenomena we implement boundaries for range anxiety, as well as the lack of charging infrastructure availability.
The model also incorporates various drivetrain technologies in three size segments (i.e., small, medium, large). In particular, the model differs between pure conventional internal combustion engines and minor electrification internal combustion engines both for diesel and gasoline. In addition, there are alternatives such as plug-in hybrid electric vehicle, battery electric vehicle, fuel cell electric vehicle, and combustion engine with compressed natural gas. Furthermore, VECTOR21 covers aspects like manufacturer strategies to comply with CO2 regulations and the regulation’s influence on the vehicle stock. Throughout the simulated year, customer purchase decisions affect the prices for new components (i.e., lithium-ion batteries, fuel cell systems) with a learning curve model.
In the second step, all new passenger vehicles are transferred into the stock model. The future evolution of a vehicle fleet is modeled based on segment specific survival rates [
26]. The survival rate depends on the vehicle age and vehicle miles thus far traveled. As a result, the model offers analysis on a ZIP-code level to see stock alteration.
For our study, the penetration of battery EVs calculated for the year 2030 by VECTOR21 is aggregated to the two model regions considered in REMix (i.e., Northern Germany and Southern Germany).
2.1.2. Electric Vehicle Charging Models (VencoPy, CURRENT)
User-optimal BEV charging strategies are not necessarily system-optimal strategies [
7]. Therefore, the consequence and differences of both approaches have to be considered in order to assess challenges and opportunities of high BEV-penetration scenarios and to draw conclusions on the detail of representing BEV charging for energy system optimization models.
In our paper, we compare two methods to simulate charging behavior of an electric fleet and then evaluate the influence of these different approaches on the energy system. First, we apply VencoPy (Vehicle Energy Consumption in Python), which is the original data preparation tool in the energy model REMix to simulate EVs and its load shifting potential in high temporal detail. VencoPy accounts for the electric demand of an electric fleet, but the charging decision and the average battery level of the fleet is determined by the power system. Second, we implement an existing transport model, CURRENT, which simulates charging behavior from a utility based approach, within the framework of REMix. This replaces the existing approach with VencoPy and accounts for detailed user behavior. We next present both models in detail. VencoPy does not directly calculate BEV charging but rather a best-case yielding high flexibility and a worst case yielding low flexibility for the energy system. Thus, when we talk about BEV charging in VencoPy’s results, we mean charging in its two respective cases.
VencoPy calculates BEV flexibility profiles constraining fleet battery charging and discharging for controlled charging in hourly temporal resolution. Only home charging is assumed with vehicle segment-dependent power (small, medium, large, see Table 4). This approach is backed by empirical findings, showing a 72% of charging energy is from home charging [
27]. Long-distance trips requiring fast charging events are excluded from the analysis. VencoPy calculates the hourly information of electric mileage, if a BEV is connected to the grid, and the maximum and minimum battery SOC possible to realize all travel demand. Demand data is taken from the trip dataset of the German travel survey for German household transportation demand (MiD) [
23]. The maximum SOC level profile represents a case where BEVs always charge when possible with maximum SOC at beginning of the day, while the minimum battery level describes the opposite case of minimum SOC and only needed electricity for the next trips is charged before departure. A similar approach is described in e.g., [
19]. Each vehicle profile is summed unweighted and normalized to a fleet profile for one day. The share of the BEV fleet that can shift its charging demand to conduct controlled charging is exogenously defined in REMix and used as a scaling factor for the normalized profiles (see next section).
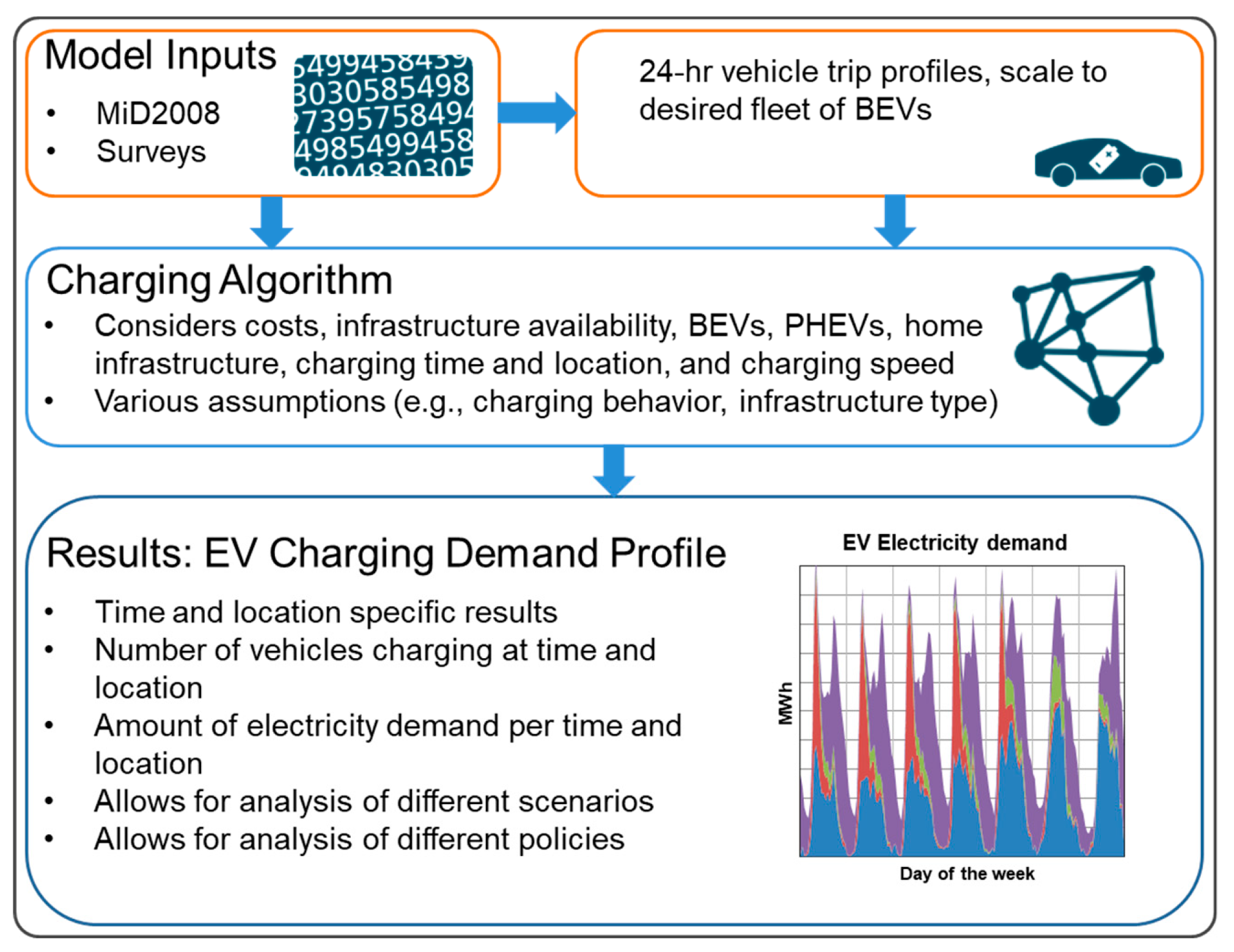
CURRENT stands for “charging infrastructure for electric vehicles analysis tool” [
28]. It is a microscopic charging demand tool for BEVs providing time and location-specific information about charging [
15]. CURRENT gives information on the hourly electricity demand of an electric fleet over the course of a week and shows flexibility potential for controlled charging. The overview of the model is presented in
Figure 2.
Two assumptions form the basis for CURRENT’s calculations. First, BEV users do not significantly change their travel pattern. Second, users predominantly charge where they already park. These assumptions are consistent with other research [
29,
30] and the anticipated user behavior for a mass-market of EVs. For our case study, we use the 2008 German household travel survey (MiD) [
23]. Next, we outline the workings of the model.
First, CURRENT takes the household travel dataset and creates 24-hour vehicle diaries with information for all trips and parking events for one day. Specific information for each vehicle is added to model it as an electric vehicle (e.g., electric range, charging power capacity). We then define the availability of charging infrastructure at different locations (e.g., home, work, shopping), available charging power, and a minimum parking time for a charging event. Using these assumptions and the vehicle diaries, every vehicle must run through the charging algorithm as a BEV. In the charging algorithm, every vehicle must complete every activity of the day (i.e., trip and parking event). Based on charging preferences and depending on charging opportunities during a day, a BEV is charged while parking or during a trip interruption at a fast charging station. At a fast charging event, a vehicle is charged up to 80% of its battery capacity with an average charging power of 37.5 kW. This results in an aggregated charging demand per hour of the week and per location for an entire fleet of EVs.
A charging event occurs stochastically based on a multinomial logit approach. The model enables users to account for charging preferences in their decision algorithm. A utility-based approach gives the probability of charging at each activity of the day and also for interrupting the trip for a fast charging event. The utility function of each activity considers the preference of charging per location and price per kWh. The charging decision is made by a Monte Carlo simulation according to the charging probability at the charging point. In addition, the probability of finding available charging infrastructure differs for each location (i.e., home, work, shopping, leisure, other). For each household with a vehicle and a private parking spot at home, we assign a private charging infrastructure with a maximum charging power of 7.4 kW. When interrupting a trip for a fast charging event, the probability to find a fast charging station is 100 percent. Fast chargers have a maximum charging power of 50 kW. At all other locations normal charging infrastructure with a maximum charging power of 11.1 kW is assumed. Due to a lack of empirical information, we make assumptions on the probability of finding available charging infrastructure based on [
28] and assigned the information for each parking event by a Monte-Carlo simulation.
As a vehicle user does not have to charge every day—the average German daily mileage of 40 kilometers is far below an electric range of a BEV—a non-choice opportunity of not charging the vehicle on the same day is included in the choice set of the charging decision in CURRENT. The non-choice opportunity gives a probability that a vehicle is not charged every day. By simulating every vehicle diary by several sequential runs, CURRENT can simulate charging events which do not occur daily. In the end, the utility based approach leads to charging events enabled by preferences for location, price, alternatives, and current SOC. These charging events do not occur every day and at every opportunity. The calibration of CURRENT aims to get the same average SOC for the fleet at the beginning and end of the week. Further detailed information on CURRENT, all assumptions, and the detailed algorithm are summarized in [
15,
28].
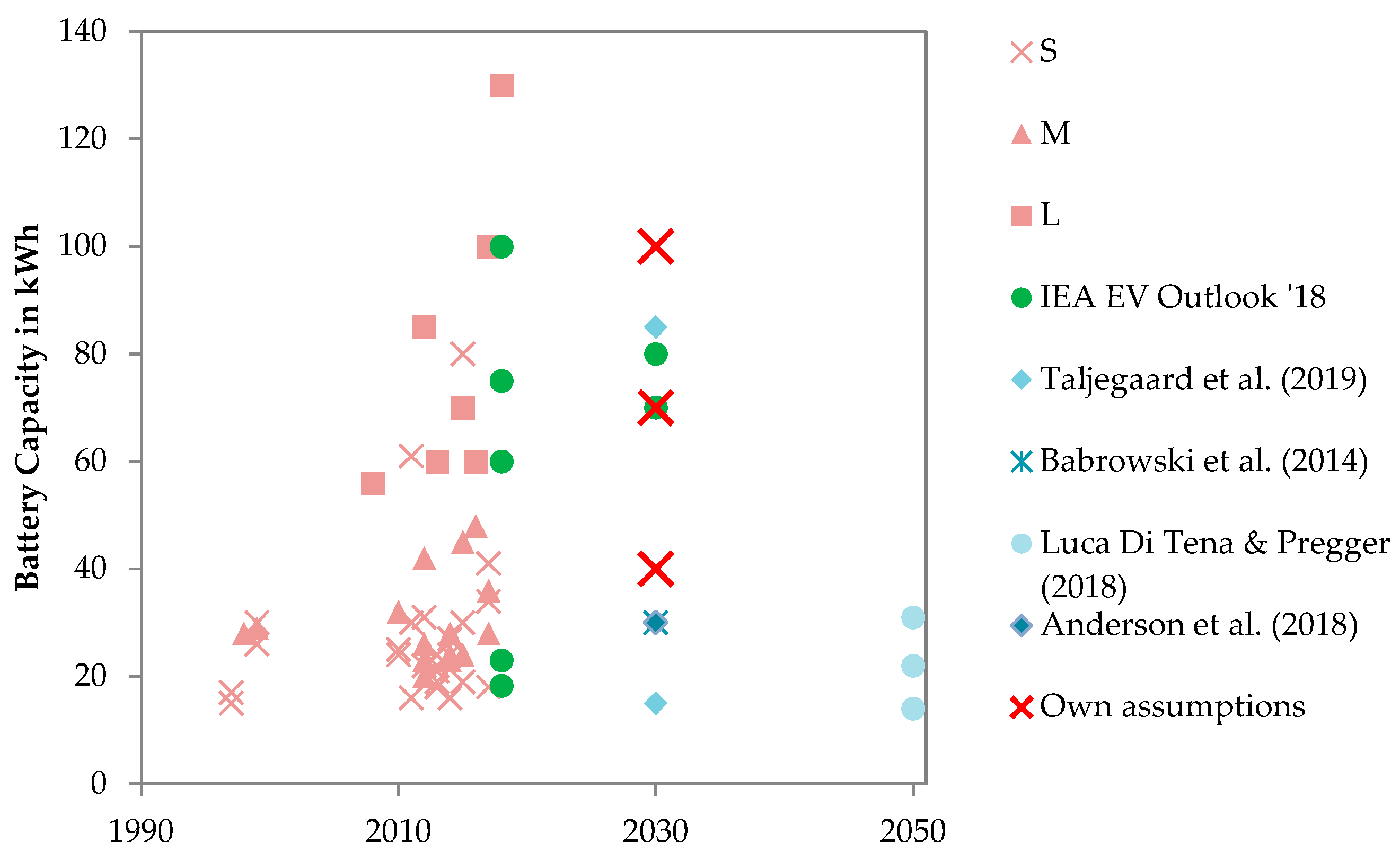
By using the 2008 German household travel survey (MiD) VencoPy and CURRENT use the same input data. The number of BEVs by segment and region differentiated for Northern Germany and Southern Germany are harmonized for both methods and based on the results of the aforementioned stock-and-flow model VECTOR21. Also, technological assumptions of BEVs such as battery capacity, consumption, and electric range are harmonized (see
Section 2.2.1).
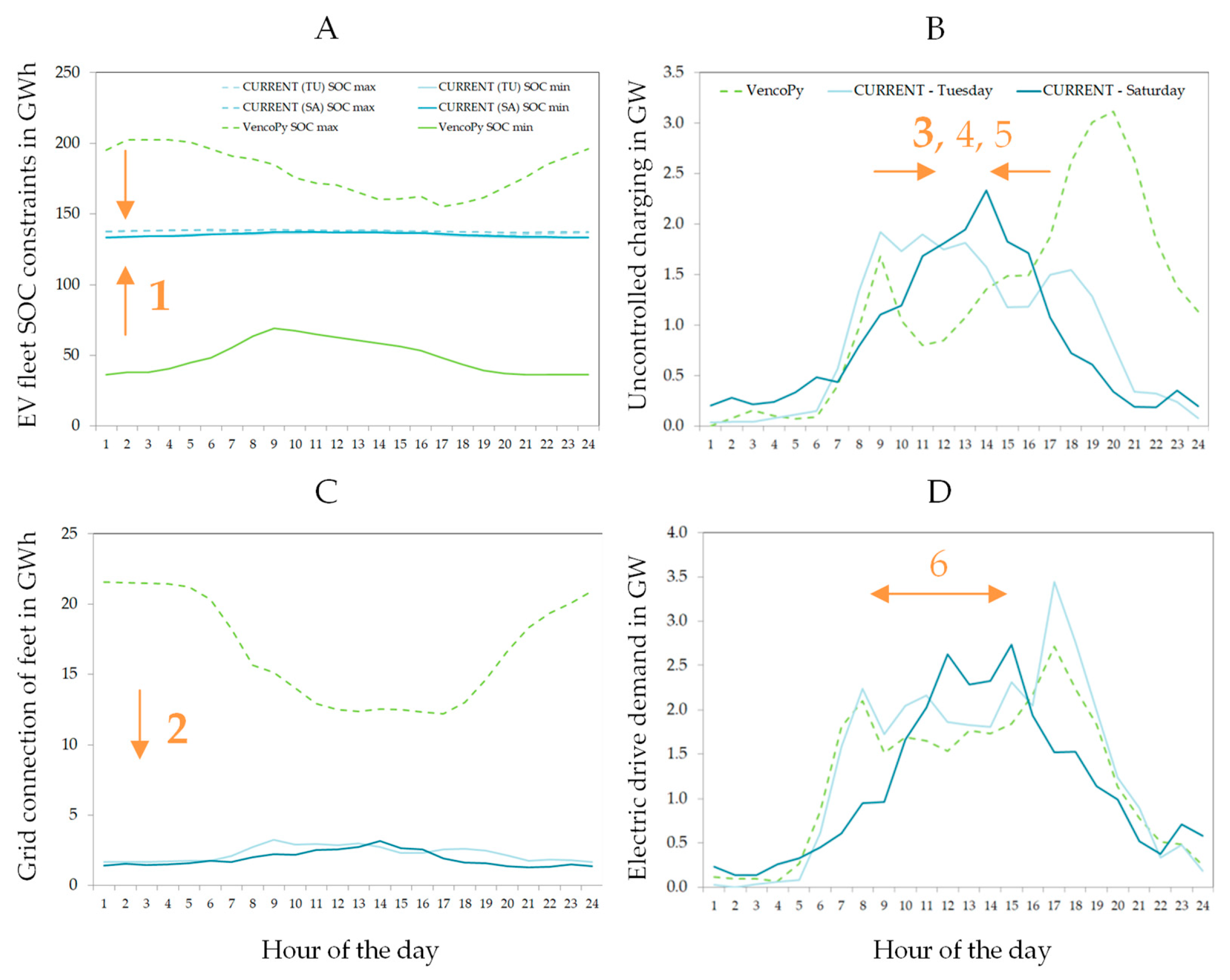
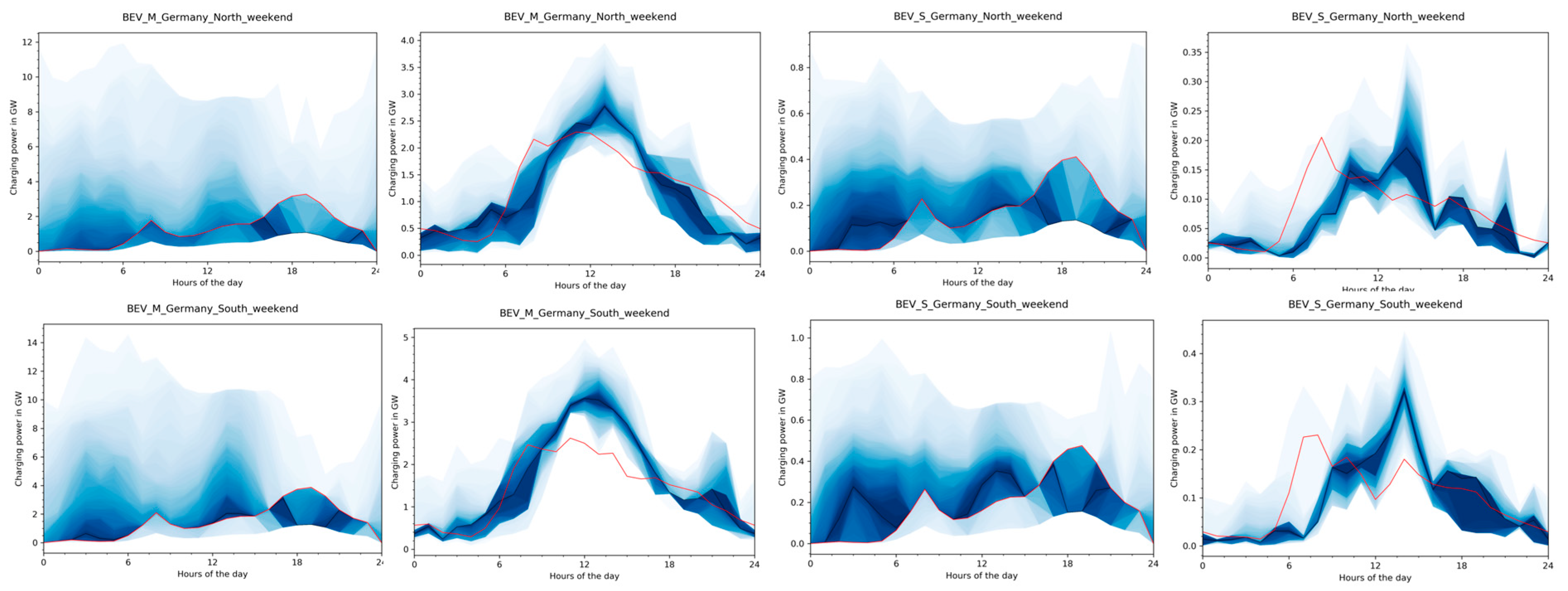
Both models differ in their degree of complexity regarding infrastructure, weekday differentiation, and users’ preferences. In comparison to VencoPy, CURRENT calculations lead to fewer charging events per day, but with the same amount of electric demand in total, and a lower number of vehicles connected to the grid because of BEV users charging and thus connecting their BEVs sufficiency-oriented in CURRENT. Also, fast charging during the trip generates a significant load due to the high charging power of each charging event and leads to high charging power during the day than in VencoPy yielding charging peaks during night hours. Fast charging events in CURRENT also give the energy system no potential to shift electricity demand, as charging time equals parking time. Since VencoPy only allows for charging at home nighttime charging is higher than during the day at other activities (i.e., work, during shopping). Allowing fast charging and charging apart from home in CURRENT, leads to more charging events during the day.
Deviating from VencoPy’s interpretation of uncontrolled charging as connecting their EV after returning home, CURRENT’s uncontrolled charging is a specific sub-part of the travel activities that require the BEV owner to recharge in order to reach sufficient SOC including fast-charging as an option of last resort. In CURRENT, minimum and maximum SOC levels of single profiles are determined via evaluating the charging time of an activity in comparison to the respective parking and thus connection time. Only if the latter is higher than necessary charging, minimum and maximum SOC profiles differ where maximum SOC represents direct charging after connection and minimum SOC the latest possible charging beginning. Thus, the power system has only little control over charging procedures under the condition of a user-oriented connection decision. This reduces the potential to shift charging demand as charging time is equal or almost equal to parking time during daytime and fast charging.
On a modeling level, a very relevant difference of the two models is their means of enforcing boundary conditions at the beginning and end of a day (VencoPy) and week (CURRENT). VencoPy assumes maximum and minimum SOC at beginning and end of a modelled day for SOC max and min respectively with a SOC security margin of 3% and secures meeting boundary conditions on each single profile basis, thus each profile and thus fleet has the same beginning and end SOC min and max. CURRENT on the other side calculates user specific SOCs for each profile under the assumption that the average BEV fleet SOC at beginning and end of the week is equal.
Table 1 summarizes the main structural differences between BEV charging representation using VencoPy or CURRENT.
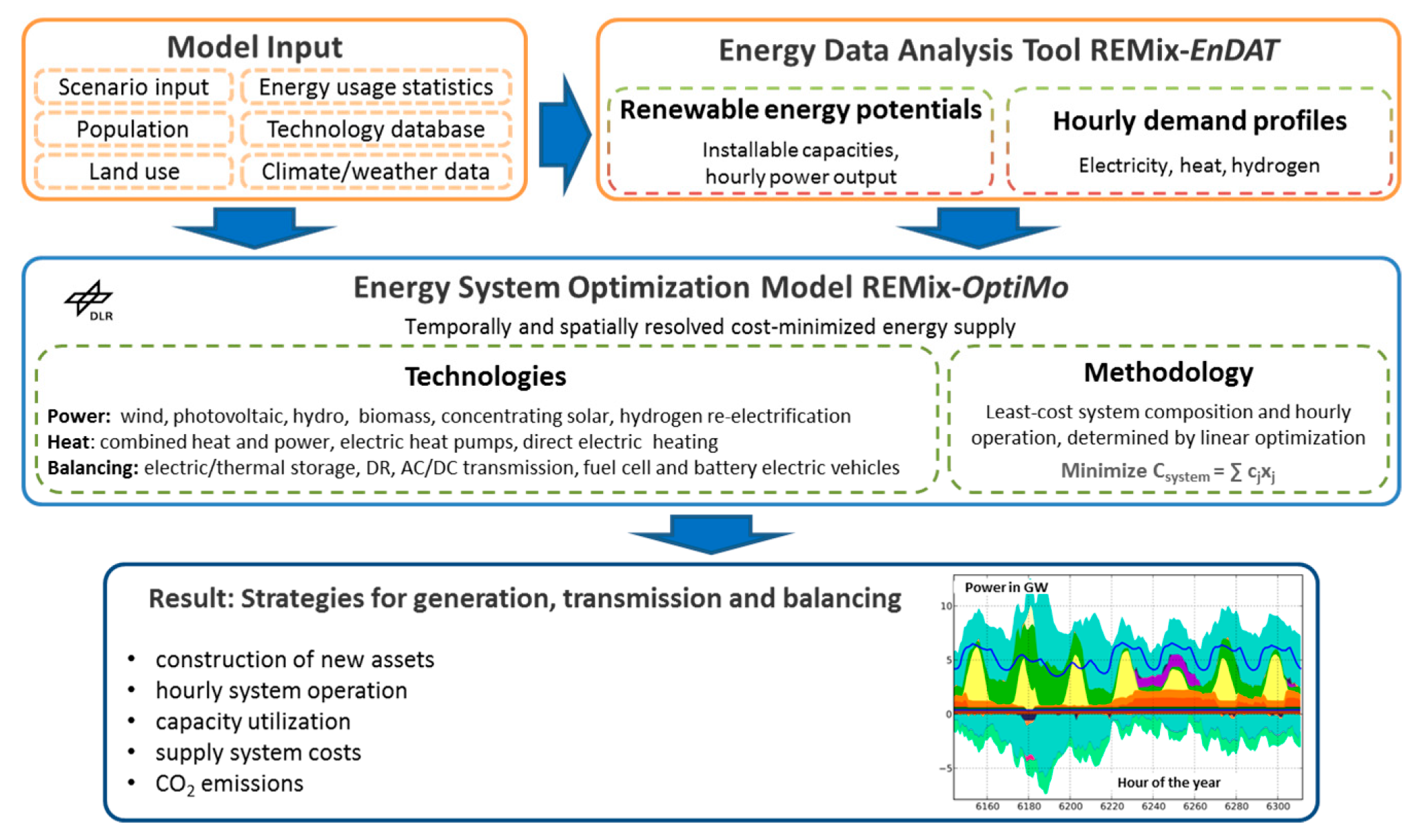
2.1.3. Energy System Optimization Model (REMix)
The main aim of REMix (renewable electricity mix) is to model future energy systems in high temporal and spatial resolution to adequately represent the influence of high shares of variable renewable energy sources. The model is composed of two sub models: the EnDat model for processing of input data and OptiMo to optimize the system design and operation.
Figure 3 shows the main elements of the REMix model. One of the main pillars of REMix-EnDat is an inventory of renewable energy source data. It contains potentials of hourly renewable energy generation and maximum installable capacities. The model and its database are described in detail in [
31]. The optimization model REMix-OptiMo relies on a linear optimization approach, which is formulated in the General Algebraic Modeling System (GAMS). The energy system is described in a system of linear equations and inequalities. The model optimizes both the hourly operation of the system during one year and the investment in additional capacities if needed to balance the energy demand. The objective function to be minimized contains the variable operational costs of all considered assets, including fuel as well as optional CO
2 emission costs, and the annuities and fixed operational costs of all endogenously added capacities.
REMix-OptiMo is a multi-node model, which implies that power generation, demand, and transmission are aggregated to predefined regional model nodes. The most important boundary condition is the power balance, which assures that power demand and supply are equal in each time step and model region. Power generation, storage, and grid technologies are represented by their cost, efficiency, availability, and maximum installable capacity. A detailed description of the general modeling approach and fundamental equations can be found in [
33]. Building upon the basic model setup introduced there, REMix-OptiMo has been continuously enhanced in its scope to not only include the power sector, but also the most relevant links to the heating and transport sectors as described in [
34].
The representation of EVs was originally developed within [
22] and has been developed further for this work. Due to REMix’ modular structure, the sets, variables, parameters, and equations of the module representing BEVs can easily be activated or deactivated for the optimization model of minimizing the overall system cost.
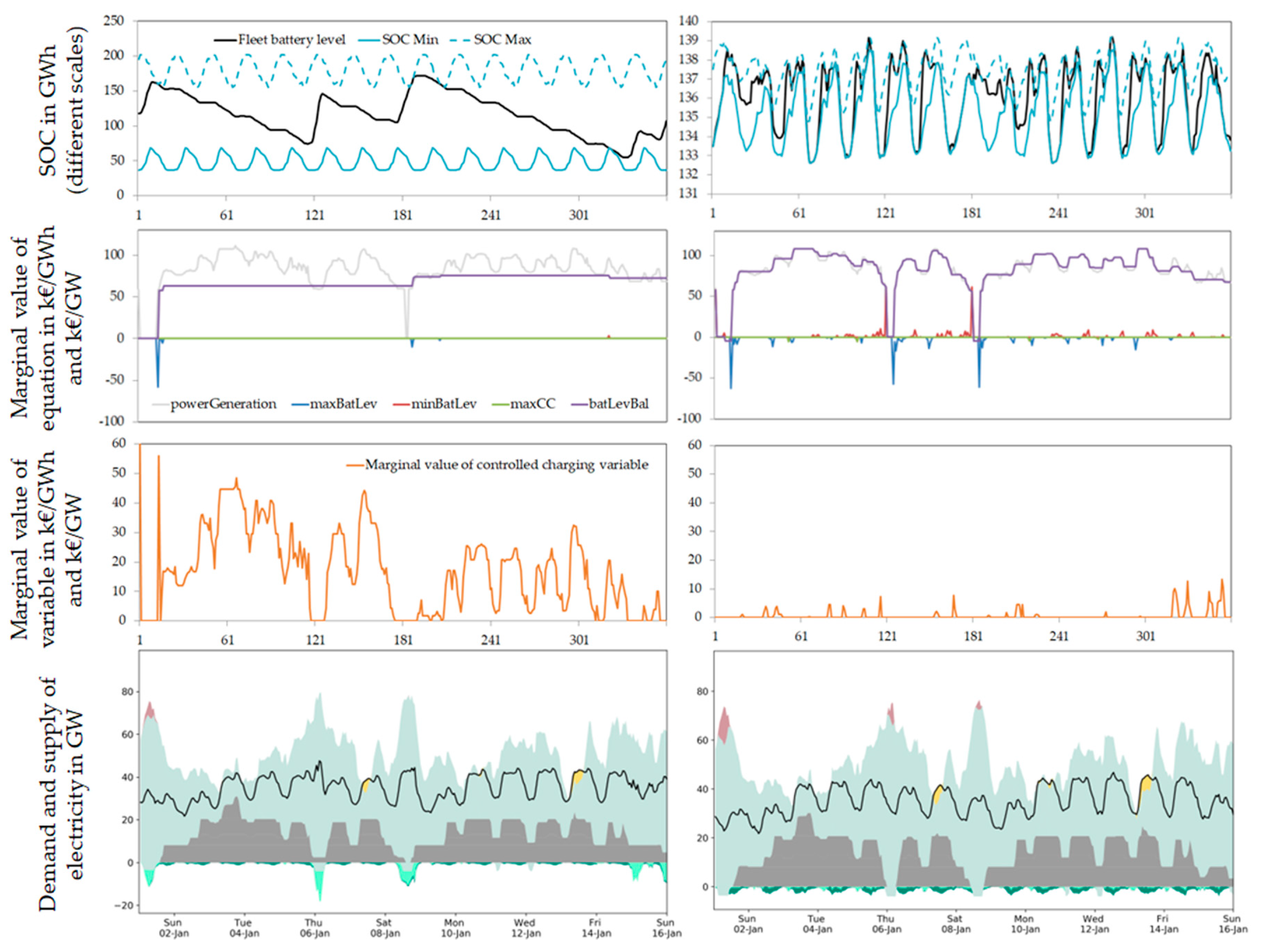
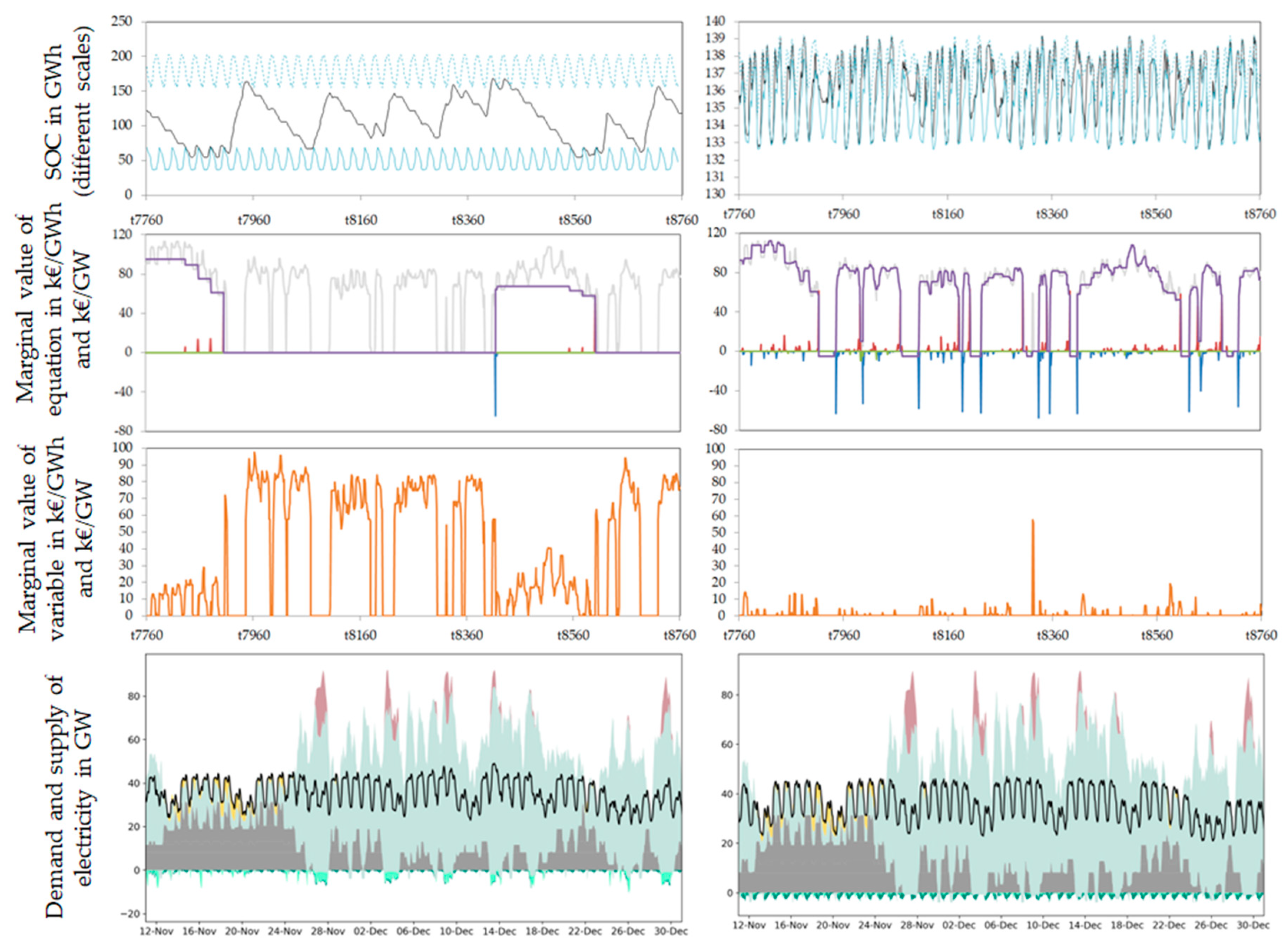
In order to represent load shifting, REMix-OptiMo requires five hourly input profiles, defining optimization constraints for charging of BEV fleet batteries. These time series input profiles contain information as follows:
The power demand in the case of uncontrolled charging;
The electric power demand required to fulfill mobility demand;
A maximum fleet battery state-of-charge level (SOC Max);
A minimum fleet battery state-of-charge level (SOC Min);
The maximum rated power of the vehicle fleet connected to the grid;
More details are given in [
22]. Profiles can either be given in normalized or absolute figures in units of GW and GWh. Scaling of normalized profiles to optimization input constraints is carried out in REMix’s pre-calculation phase with additional assumptions on battery capacity, vehicle numbers, charging efficiencies, and BEV segment-specific rated connection power. Non-linear effects such as the degradation of batteries depending on cycling frequency cannot be accounted for within REMix.
In [
22], Venco provided normalized profiles with battery capacity and vehicle consumption given as input parameters. These profiles were then scaled by regional technology specific vehicle numbers, battery sizes, and consumption rates in the data preparation stage of REMix. For S1, this approach is adopted with harmonized technical and fleet-size assumptions. For S2 on the other hand, scaling from single-profile level to fleet level as well as infrastructure assumptions are endogenous parts of CURRENT calculations, thus the scaling step is skipped.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















