1. Introduction
Modular multilevel converter (MMC) topology was first introduced in 2003 [
1,
2] and it has been widely used in high voltage and high power applications, due to its advantages of modularity, scalability, and power controllability. The stability of MMC itself is a significant premise to study the stability of MMC cascading with other cells, e.g., wind farm, PV inverters, weak grid, and so on. While the key is the modeling of MMC itself. However, MMC is characterized by the obvious internal dynamics in sub-module capacitor voltages and arm currents [
3,
4], which makes its modeling considerably more complicated than the conventional two/three-level voltage source converters (VSCs). Most of the initial researches [
5,
6,
7,
8] used the average model, which neglected these internal harmonic characteristics in the modeling process and only obtained the simplified mathematical equations of MMC in fundamental frequency.
Many scholars recently have done deep studies about the modeling of MMC to achieve high accuracy of small signal model of MMC. The state-space model of MMC based on dynamic phasors contains the internal dynamics, which is often used to model a nonlinear time-varying system as a linear time-invariant system [
9,
10,
11,
12]. The small signal state-space model of MMC with dual-loop controllers and circulating current suppression controller in
dq coordinate frame was established in [
13]. However, only the second harmonic components of submodule capacitor voltages were considered and harmonics of other variables, e.g., arm currents, were neglected. Another state-space model of MMC that was based on dynamic phasors was built in
dq coordinate frame [
14,
15], but this modeling method needs to take park transformations at different frequencies which makes the modeling process complicated. Additionally, this model only contained the internal harmonics but ignored the external harmonics, which would exist on the ac side and dc side of MMC and produce influence on the internal harmonics. Reference [
16] raised a dynamic phasor model method of MMC that was only applied to open-loop control. However, it required listing all of the relationships among the considered harmonic frequencies in advance; therefore, this method is not suitable for extending to higher harmonic frequencies. Additionally, it also neglected the external harmonics. The idea of multiple harmonic linearization was used in [
17] to obtain the small signal model of MMC with single current loop. However, this modeling process neglected the harmonics of dc side. Moreover, this small signal model did not have enough equations to solve the value of state variables, so it is only suitable for deriving the relative relationships, such as the output impedance of MMC. Therefore, it is necessary to propose a small signal modeling method of MMC, which takes the dynamic characteristics of both internal and external harmonics into account and establishes a complete model of MMC while considering the inner and outer control loops. The harmonic state-space (HSS) modeling method could characterize the frequency coupling mechanism of harmonics, and it has been successfully used in two/three-level VSCs [
18,
19,
20,
21]. The HSS method is also applicable to model the ac side impedance of MMC [
22], showing a satisfactory result. However, this small-signal impedance model only contributes to the stability analysis of the interconnected systems [
23]. Thus, it could not be used as a tool to estimate the stability of MMC itself.
In the MMC-based HVDC system, grid-side MMC often adopts dc voltage control mode. Therefore, this paper develops a precise small signal model of MMC under dc voltage control mode based on the HSS method in frequency domain, while considering both internal and external harmonic dynamics, as well as the interactions. Additionally, the stability of the system and the influence of controller parameters are then analyzed with the pacification factor method and eigenvalue analysis method.
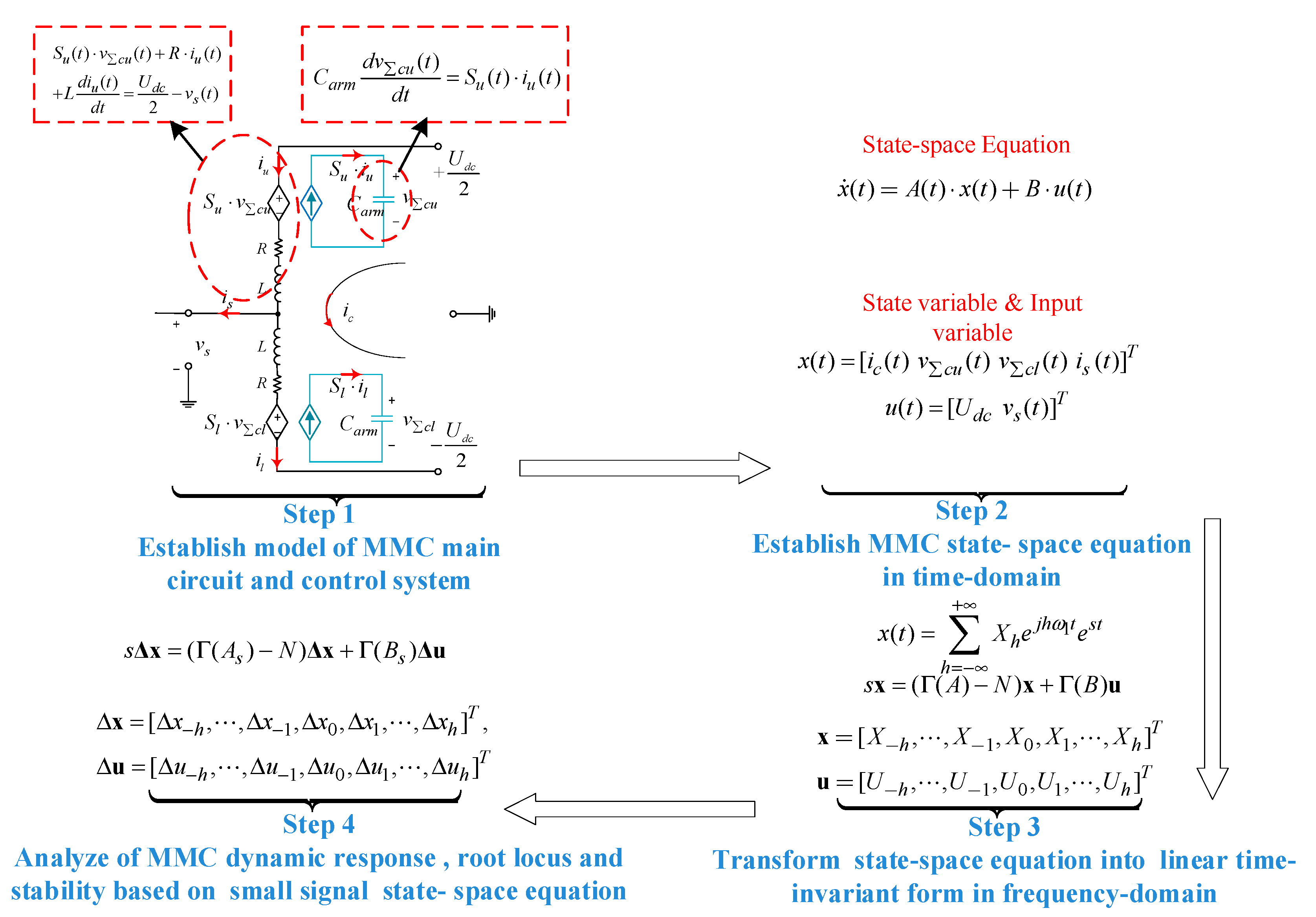
This paper follows the steps below, which are shown in
Figure 1, in order to analyze the stability of MMC system. First, a model of MMC main circuit and control system are established; Second, the MMC state-space equation in time-domain is established. Next, the state-space equations are transformed into linear time-invariant form in frequency-domain. Finally, MMC dynamic response, root locus, and stability based on small signal state-space equation are analyzed.
When compared with the traditional state-space equation, the signal
x(
t) is expressed as an exponentially modulated periodic (EMP) signal to represent harmonic of different orders in the tome domain in Step 3 of
Figure 1. On the other hand, because the MMC control system and electrical system are coupled with each other and control loops are coupled with each other, the Toeplitz matrix Γ(
A) is applied to express the coupling of state variables with different frequencies in Step 3. Therefore, as compared with the traditional state-space model, the MMC small signal model that is based on harmonic state-space in this paper makes the analysis of dynamic characteristics, steady-state characteristics, and stability of MMC more accurate.
The rest of this paper is organized, as follows.
Section 2 introduces the basic topology and operation theory of MMC and it derives the state-space equations in time domain.
Section 3 builds the steady-state model and the small signal model of MMC based on the HSS method in open-loop control mode and dc-voltage control mode, respectively.
Section 4 uses the eigenvalues and participation factors of the established HSS small signal model to analyze the stability of a dc-voltage controlled MMC system and the influence of controller parameters on the stability of the system.
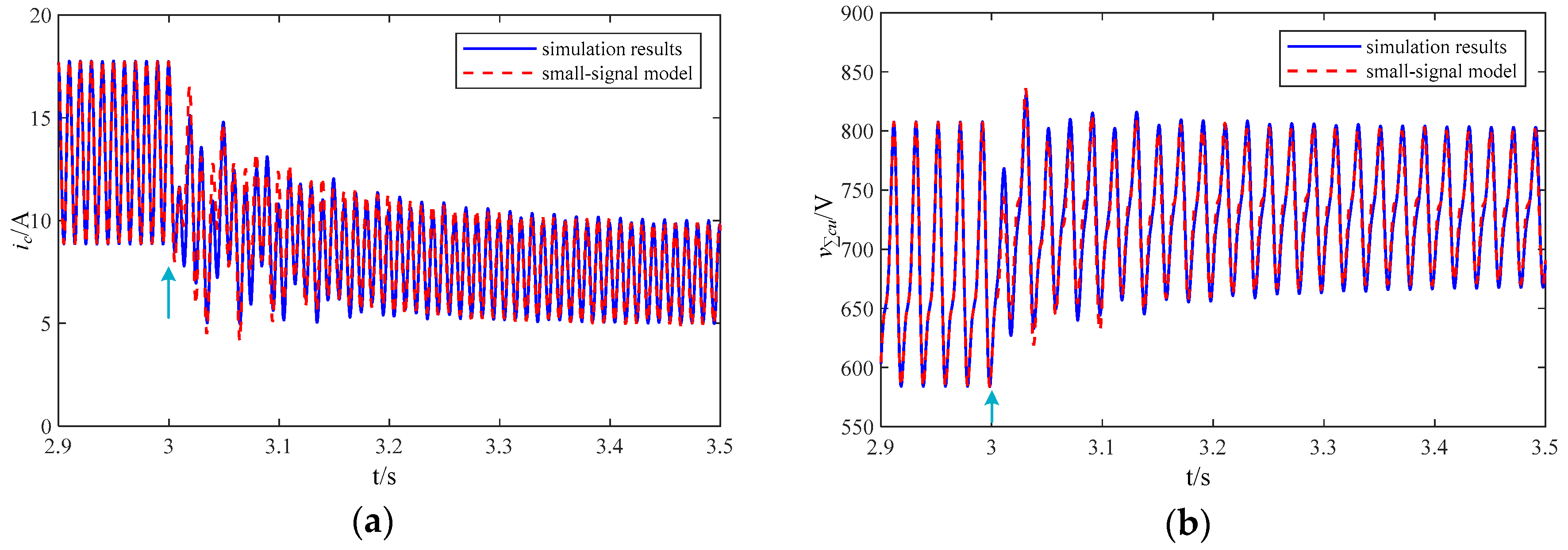
Section 5 provides a case study of dc voltage-mode controlled MMC, and the simulation result verifies the validity of theoretical analyses.
Section 6 concludes the work of this paper.
2. Basic Theory of MMC
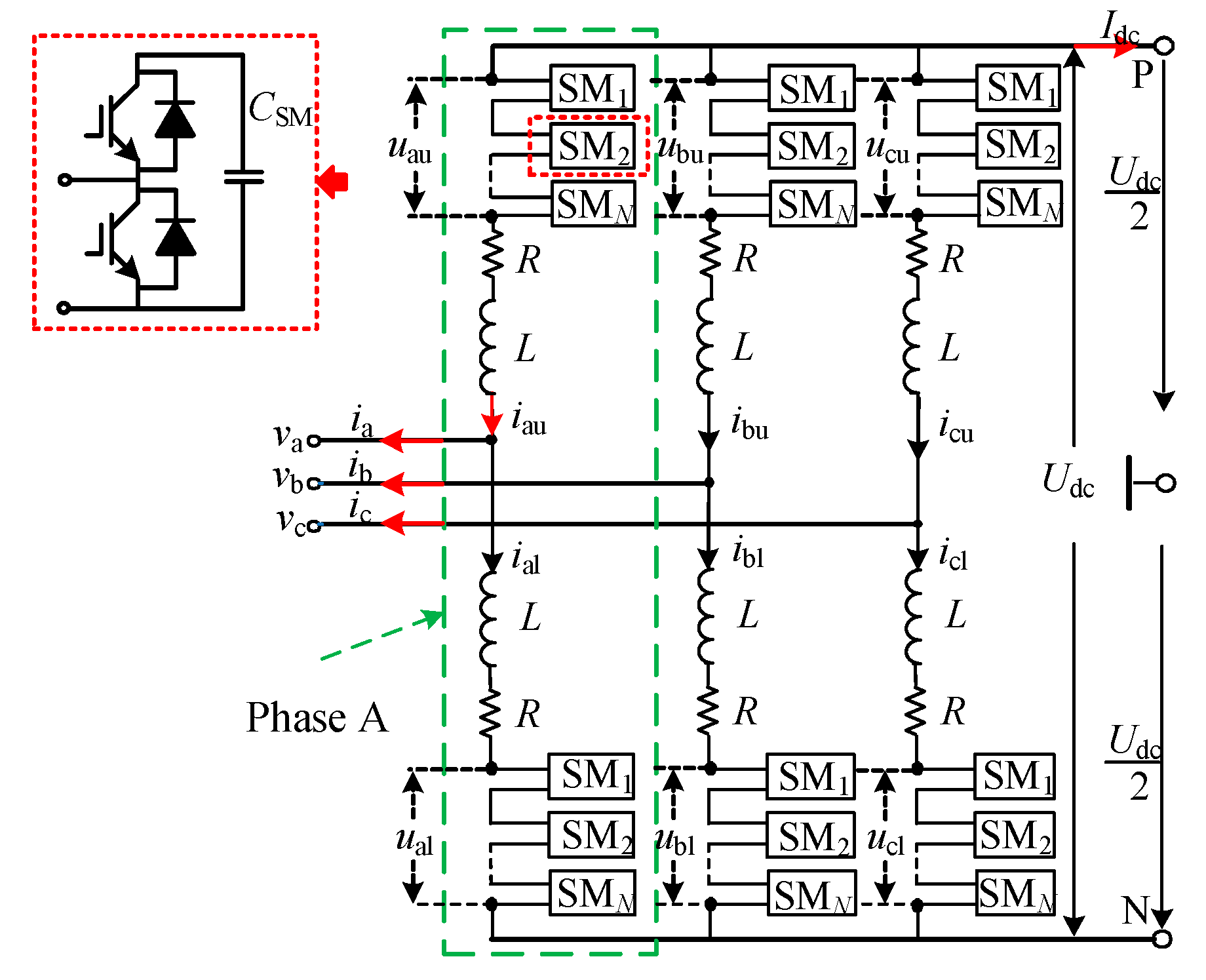
Figure 2 shows the basic structure of MMC. The converter consists of three phases, and each phase consists of one upper arm and one lower arm connected in series between two dc terminals. Each arm has
N series-connected half-bridge submodules (SM) and one arm inductor
L, the equivalent parasitic resistance of which is
R.
CSM is capacitance of submodule capacitors, whose nominal voltages are all
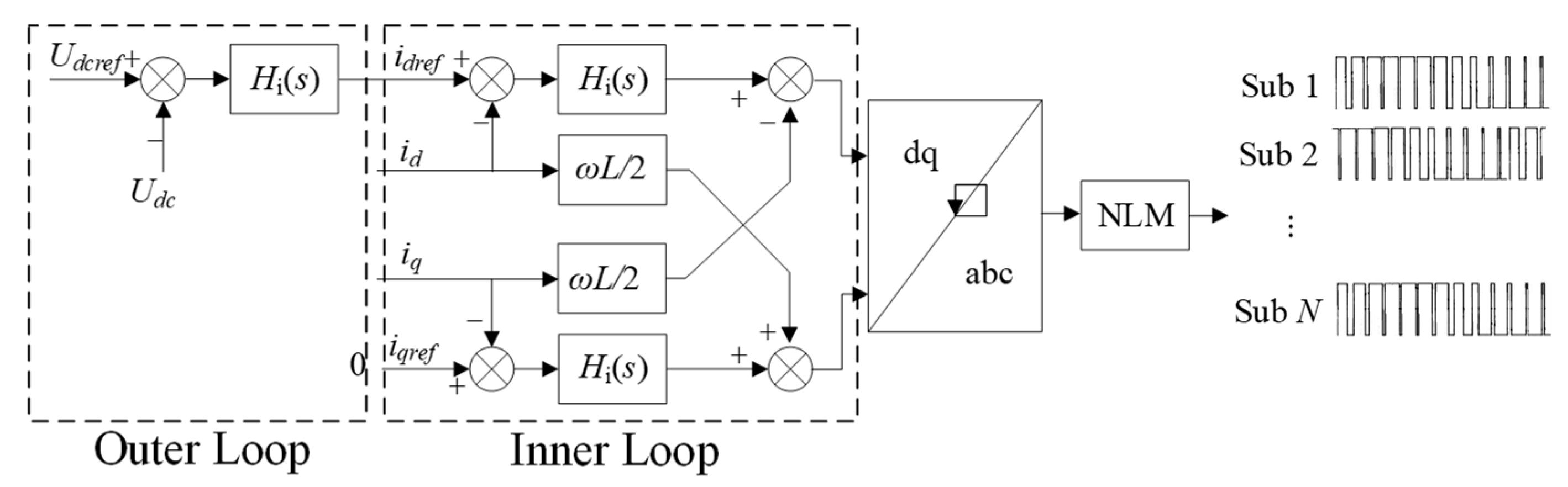
Udc/N. Figure 3 shows the control block diagram of MMC. The control system of MMC is divided into outer loop and inner loop, where outer loop is dc voltage control loop and inner loop is current control loop.
In outer control loop, the difference of dc voltage reference value and actual dc voltage value goes through a PI controller and generates current reference value in
d axis. Inner control loop adopts the basic
dq decoupling control strategy, as shown in
Figure 3, where
idref and
iqref are
d-axis and
q-axis current reference values, respectively.
idref is given by the outer dc voltage control loop and
iqref is 0. The differences between the current reference values and actual current values go through PI controllers,
dq inverse transformation, and nearest level approximation modulation (NLM) and modulation function in
abc reference frame are finally generated.
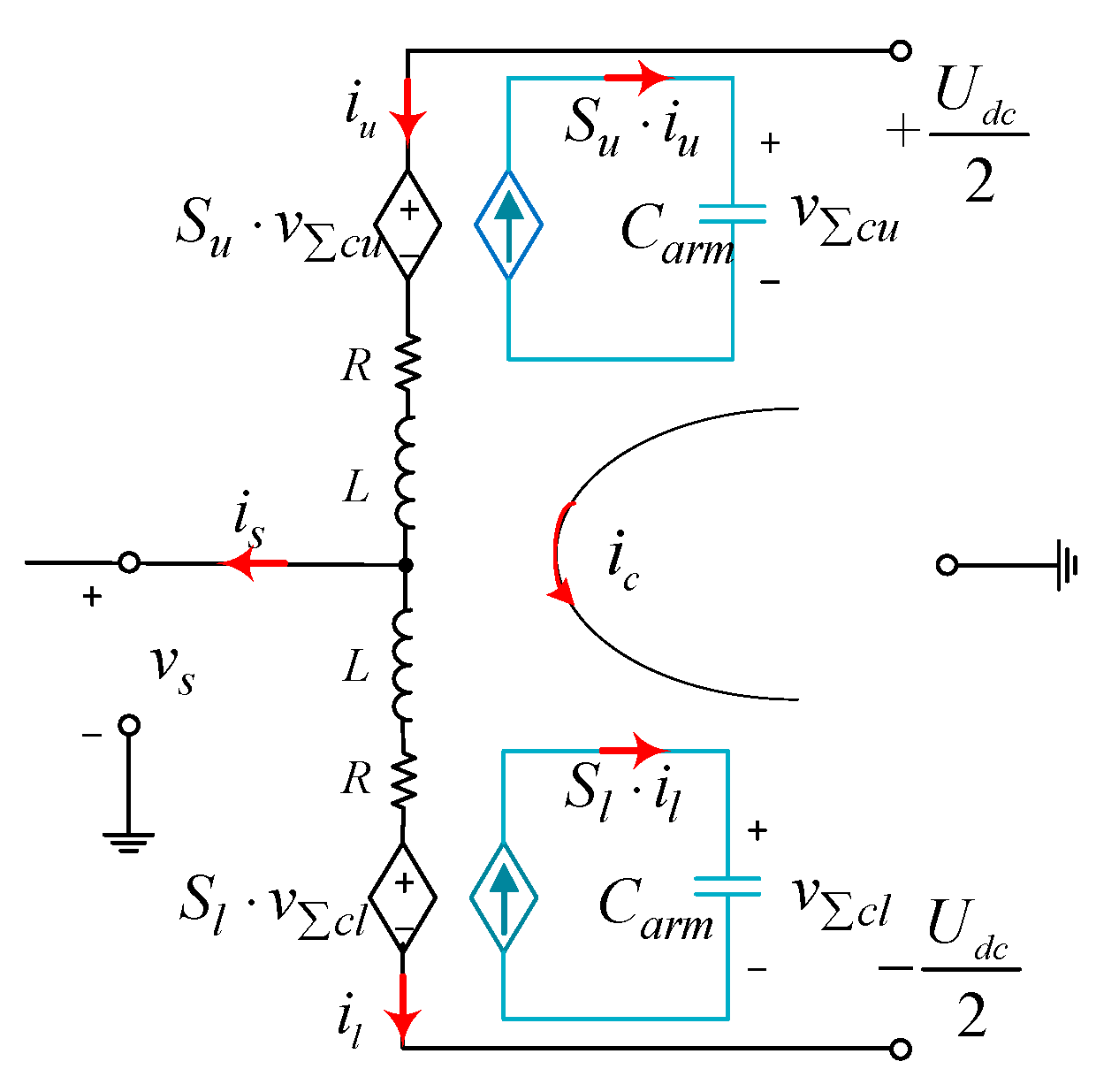
When the MMC operates in steady state, while assuming that capacitance voltages of all submodules are perfectly balanced, the average equivalent circuit of one phase could be constructed, as in
Figure 4 [
8]. Additionally,
Carm is the equivalent capacitance of one arm, where
Carm = CSM/N. The switching functions of upper and lower arms are
Su and
Sl respectively.
vs is the ac side phase voltage of the converter, and
Vdc is the dc terminal voltage.
v∑cu and
v∑cl are the sum of the capacitor voltages of the upper and lower arms, respectively.
In
Figure 4, the average switching functions of upper arm
Su and lower arm
Sl are defined as:
where
m(
t) is the modulation function of this phase:
m(
t) = 2
vs(
t)/
Udc.
While applying Kirchhoff’s law to this one-phase circuit of MMC, the equations of the upper and lower arms can be derived as:
The dynamic performance of the submodule capacitors can be obtained as:
The arm currents of upper and lower arms can be represented as:
where
is is ac side phase current of the converter and
ic = (
iu + il)/2, which refers to the circulating current flowing through the upper and lower arms of the converter at the same time.
Note that the dc component of
ic is
Ic0, and then the dc side current
Idc can be expressed as:
Substituting (7) and (8) into (3)–(6), the state-space equations of one-phase of MMC can be expressed as:
where
The above state-space equation of MMC indicates a nonlinear time periodic (NLTP) system. The detailed derivation process of converting this system into a linear time-invariant (LTI) system with the HSS method will be shown in the following section.
3. Small Signal Modeling of MMC Based on HSS
3.1. HSS-Based Large Signal Model of MMC Power Stage
Any time-varying periodic signal
y(
t) can be described as the form of Fourier series expansion:
where
ω1 =
2π/T1 and
T1 is the fundamental period of the periodic signal, and
h is the harmonic order.
Specially, the state variable
x(
t) is written as an exponentially modulated periodic (EMP) signal to represent the transient evolution of the harmonics:
where
s =
σ +
jω is used to modulate the Fourier coefficient for extracting the transient response of harmonic components [
18].
Based on the transformations (14) and (15), the NLTP state-space model in (10) of single phase of MMC in time-domain can be expressed as a LTI HSS model in the frequency-domain [
19,
20,
21]:
where
where
Xn,
Un are, respectively, the
nth Fourier coefficient of state variable
x(
t) and input variable
u(
t), and
n = −
h, … −1, 0, 1, …,
h.
where
Icn is the
nth Fourier coefficient of
ic(
t), and
V∑cun is the
nth Fourier coefficient of
v∑cuo(
t). Other parameters have similar meanings, which are not explained repeatedly here.
Γ(
A) and
N in (16) are expressed as:
Γ(A) is a Toeplitz matrix form of A, as shown in (19), which consists of the Fourier series of the matrix A, where An is the nth Fourier coefficient of A (n = −h, …, −1, 0, 1, …, h). O in (19) is zero matrix. I in (20) is the identity matrix, which has the same order as A.
Γ(B) in (16) is a Toeplitz matrix form of B, being similar to (19), which consists of the Fourier series of the matrix B, where Bn is the nth Fourier coefficient of B.
Equation (16) represents the steady-state model of single phase of MMC that is based on the HSS method, which is linearized from (10) and is a LTI system. Therefore, the stability of MMC can be analyzed with the classical control theory. This HSS model can not only obtain the information of the 0–hth harmonics, but also reflect the interactions between the harmonics.
Letting the left side of (16) to be zero, the steady-state solution of HSS model of MMC can be calculated by:
where the frequency-domain values of state variables can be obtained. Referring to (14), the time-domain values of
ico(
t),
v∑cuo(
t),
v∑clo(
t), and
iso(
t) can be solved.
3.2. HSS-Based Small Signal Model of MMC with Open-loop Control
Based on Equations (3)–(6), the small-signal model of MMC around an operation trajectory (characterized by
mo(
t),
v∑cuo(
t),
v∑clo(
t),
iso(
t)) can be derived as:
In open-loop control mode, the modulation signal
m(
t) is directly given, so it could serve as an input variable in the state-space model. While combining Equations (26)–(29), the small signal model of MMC in open-loop control mode, which is also the model of power stage of MMC, can be represented as:
where
where
ico(
t),
v∑cuo(
t),
v∑clo(
t), and
iso(
t) represent the steady operation point of MMC, which can be solved from Equation (25).
By converting Equation (30) into a HSS equation, the small signal model of MMC with open-loop control mode can be expressed as:
where
Γ(As) is the Toeplitz matrix form of As, and Γ(Bs) is the Toeplitz matrix form of Bs. The elements in (35), such as Δxn, Δun, Asn, and Bsn are the nth Fourier coefficients of Δx(t), Δu(t), As(t), Bs(t), and n = −h, …, −1, 0, 1, …, h.
3.3. HSS-Based Small Signal Model of MMC with DC-Voltage Control
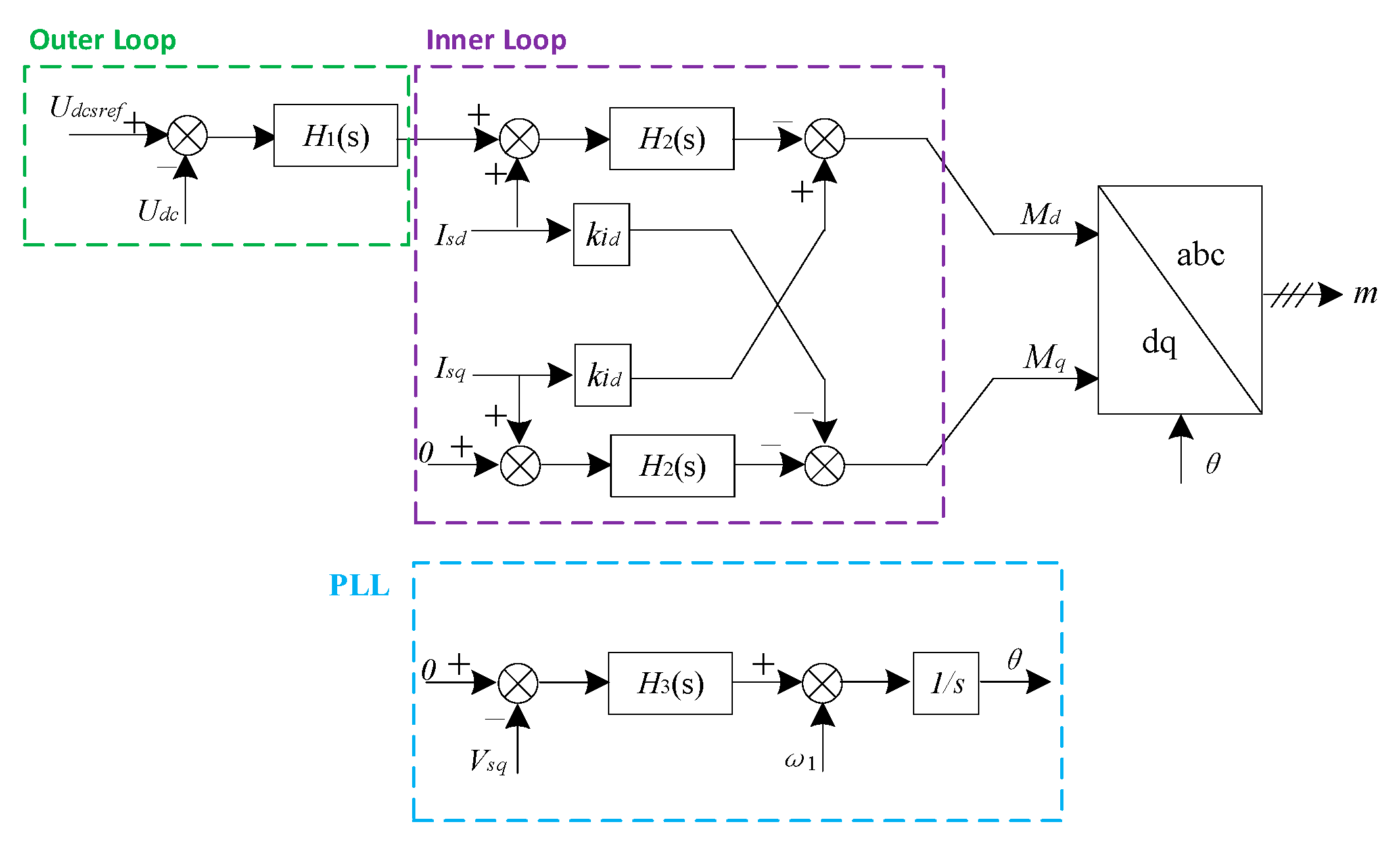
DC-voltage control is commonly used in an MMC-based HVDC system to maintain the dc bus voltage.
Figure 5 shows the control structure, which contains outer dc-voltage control loop, inner current control loop, and phase-locked loop (PLL), where
Udc and
Udcref are the dc side voltage of MMC and its reference value, respectively.
Isd,
Isq are the values of MMC ac side current in
dq coordinate system.
Vsd,
Vsq are the values of MMC ac side voltage in
dq coordinate system, and
Md,
Mq are the values of modulation signal in
dq coordinate system.
ω1 is the fundamental angular frequency of 314.1 rad/s, and
θ is the output phase angle of PLL.
H1(
s),
H2(
s), and
H3(
s) are the PI controllers of dc voltage control, current control, and PLL control, respectively.
kid is the decoupling coefficient. The effect of small signal disturbance on PLL can be neglected when the converter is integrated with a strong enough ac grid [
24]. Therefore, the small signal model of MMC in this paper does not take the effect of PLL into account.
3.3.1. Small Signal Model of Inner Current Control Loop
The inner current control loop contains two PI controller. Two additional state variables
xi1,
xi2 are introduced to simplify the integral operation:
where
kp2 and
ki2 are proportional coefficients and integral coefficients of the PI controllers in current control loop respectively.
Then the output small signal insertion indexes Δ
Md1, Δ
Mq1 in
dq coordinate system of the inner loop are:
The Δ
Md1, Δ
Mq1 in
dq coordinate system need to be transformed into Δ
mi(
t) in
abc coordinate system, where Δ
mi(
t) is the control signal of phase A that is produced by the inner loop. Firstly, according to the
dq transformation matrix,
Isd and
Isq can be expressed as:
where the Park transformation matrix
Tdq is:
From Equation (38), the relationships between
Isd,
Isq, the amplitude
I, and the phase angle
φ of phase A current are:
Combining Equations (14), (36) and (40), Equation (36) in time-domain can be represented in the frequency-domain:
According to inverse Park transformation matrix, Δ
mi(
t) could be calculated as:
where the inverse Park transformation matrix
Tdq−1 is:
According to the complex form of Fourier expansion, the ±1st coefficients of Δ
mi(
t) are:
Substituting (37) and (41) into (44) the ±1st coefficients of Δ
mi(
t) are:
3.3.2. Small Signal Model of Outer DC-Voltage Control Loop
As shown in
Figure 5, the difference between the actual value of the dc voltage and the reference value would pass through the outer loop PI controller and then the inner loop PI controller, producing small signal insertion index Δ
Md2 in
d axis. Two additional state variables
xv1,
xv2 are introduced to achieve the integral operation of dc components for two integral components:
where
kp1 and
ki1 are the proportional and integral coefficients of the PI controllers in outer DC voltage control loop, respectively. Afterwards, the output control signal Δ
Md2 is:
According to inverse Park transformation matrix, the control signal Δ
mv(t) of phase A in
abc coordinate system can be obtained from
According to the complex form of Fourier expansion, the ±1st coefficients of Δ
mv(
t) are:
Assume the equivalent impedance on the dc side is
ZL. According to Equation (9), Δ
Udc is
Substituting (47) and (50) into (49), the ±1st coefficients of Δ
mv(
t) can be represented, as follows:
3.3.3. Small Signal Model of DC-Voltage Controlled MMC
The models of control system and open-loop system need to be integrated into one state-space equation in order to establish the small signal model of the entire closed-loop system of MMC.
The state variables of the closed-loop system of MMC include four state variables of power stage (Δ
ic, Δ
v∑cu, Δ
v∑cl, Δ
is) and four state variables of control system (Δ
xi1, Δ
xi2, Δ
xv1, Δ
xv2):
The input variables of the closed-loop system of MMC are the same as the input variables of the power stage of MMC:
By combining the equations of control system (36), (45), (46) and (51) with the HSS model of power stage in (34), the HSS model of the entire closed-loop system can be expressed as:
where:
Additionally, N is the same as (20).
The variables Δxi1, Δxi2, Δxv1, Δxv2, and ΔUdcref in (55) are all dc components. When these variables are transformed into Fourier series, they only have values at the frequency of 0 Hz, and the components of other frequencies are zero.
The control signals Δ
mi+1, Δ
mi−1, Δ
mv+1, and Δ
mv−1 in (56) are added to the system matrix
Ac, and they are only related to the matrix components
A0O,
A0P,
A0N,
A−1O,
A−1N,
A1O, and
A1P. The other matrix components
A0,
A+1,
A−1,
A+2,
A−2 … are only dependent on the main circuit of MMC. Subsequently, the specific expressions of these matrix are presented in the
Appendix A.
Similarly, for the input matrix
Bc, as shown in (57), the controlling signals Δ
mv+1 and Δ
mv−1 need to be added into the matrix, and they are only related to the matrix components
B0O,
B+1O, and
B−1O. The specific expressions are also presented in the
Appendix A.
In general case, circulating current mainly contains dc and second harmonic components and the capacitor voltages mainly contains dc, fundamental, second and third harmonic components. Therefore, the harmonic order considered in the HSS model is h = 3.
4. Stability Analysis Based on the HSS-Based Small Signal Model
Table 1 shows the main parameters of the studied MMC. It is worth mentioning that the number of modules in one arm is 20 to reduce the simulation time.
Figure 5 shows the MMC operates in dc voltage control mode. Firstly, the outer loop controller parameters are set as
kp1 = 0.87 and
ki1 = 10, the inner loop controller parameters are set as
kp2 = 0.019 and
ki2 = 0.057. It needs to be noted that, since the four state variables of control system Δ
xi1, Δ
xi2, Δ
xv1, and Δ
xv2 only have values at the frequency of 0 Hz, they do not have significance at other frequencies (−3
ω1, −2
ω1, −1
ω1, 1
ω1, 2
ω1, 3
ω1). Thus, there are always 24 eigenvalues at the origin (0,
j0), having no effect on the stability analysis of the system. After calculation, it is confirmed that in addition to these 24 eigenvalues, there is another eigenvalue that is located at the origin. Therefore, these 25 eigenvalues will not be discussed in this paper. Additionally, other eigenvalues are plotted as shown in
Figure 6. It can be seen that all eigenvalues are on the left half plane of the complex plane, which indicated that the MMC system is stable with these controller parameters.
The concept of oscillation mode is introduced, that is, a real root or a pair of conjugate complex roots represent one oscillation mode of the system in order to further analyze the eigenvalues. Additionally, the participation factor analysis is introduced to analyze the interaction between state variables and oscillation modes. The participation factor of the
kth state variable in the
ith oscillation mode of the system can be calculated by [
25]:
where
Φki is the element in the
kth row and
ith column of the right eigenvector matrix, and
Ψik is the element in the
ith row and
kth column of the left eigenvector matrix.
Table 2 lists the oscillation modes of the MMC systems and their main participating state variables, according to the value of the participation factors.
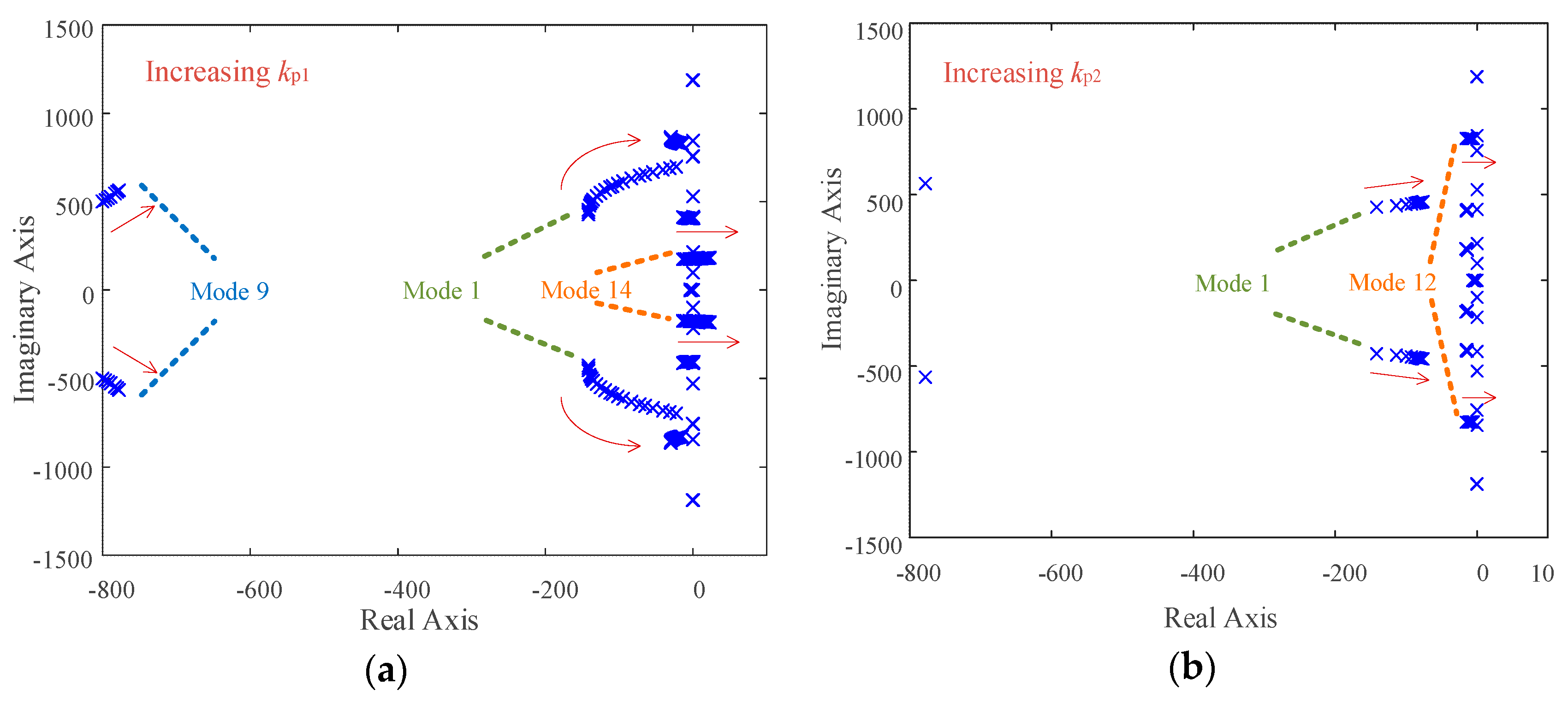
Eigenvalue loci when
kp1 and
kp2 changes are shown in
Figure 7a,b, respectively, to analyze the effect of the controller parameters on the stability of MMC. When increasing the parameter
kp1 of outer voltage loop with other parameters unchanged, as shown in
Figure 7a, oscillation modes 2, 3, 6, 7, 8, 10, 11 remain unchanged, which means that these eigenvalues are not affected by the change of
kp1 and most of other oscillation modes move to the right. As
kp1 gradually increases, oscillation modes 4, 12, 14, 15 move horizontally to the right whose imaginary parts are nearly unchanged. Additionally, when
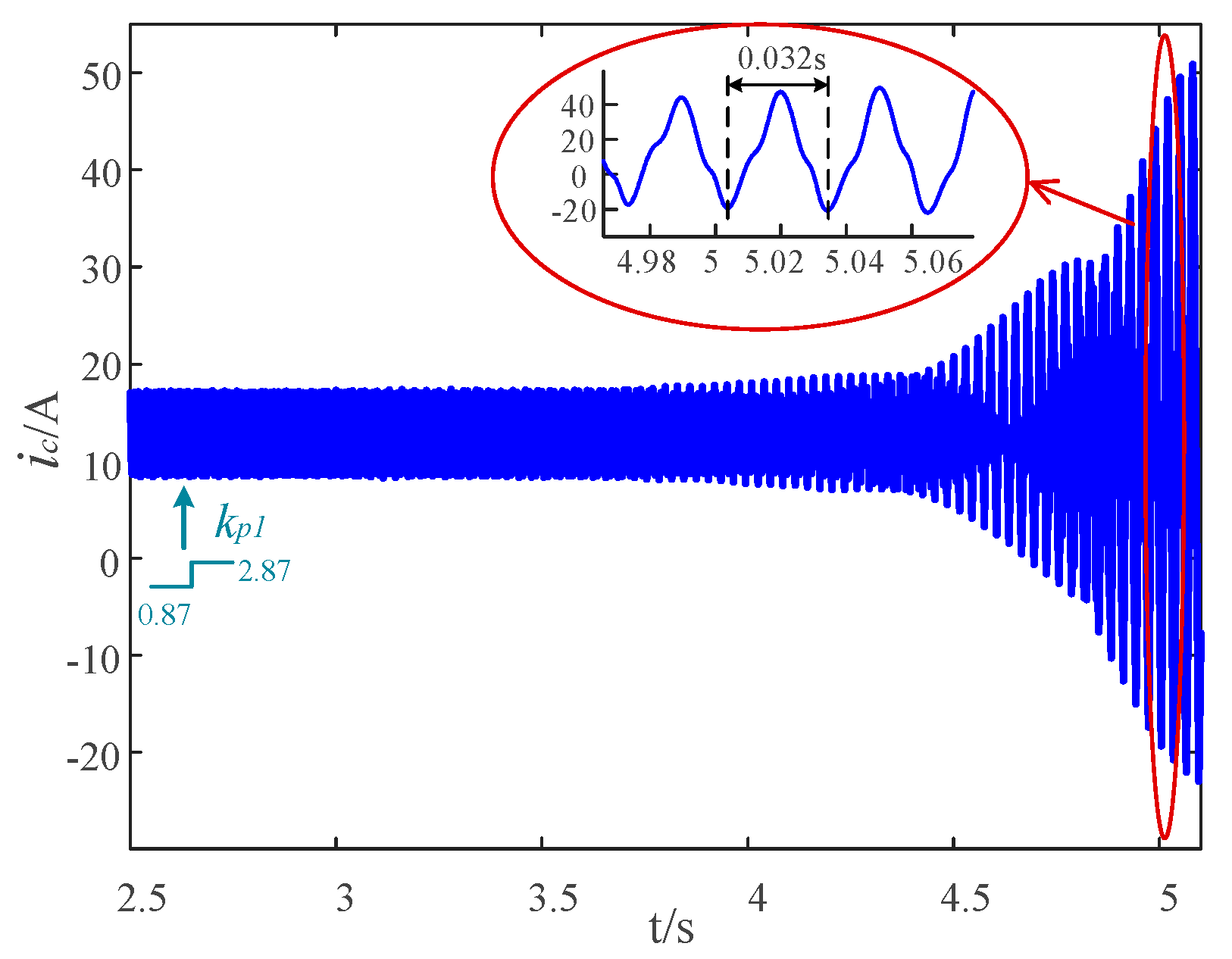
kp1 is 1.57, oscillation mode 14 firstly moves to the right half plane, which causes the instability of the system. For example, when
kp1 = 2.87, the eigenvalues of oscillation mode 14 are (4.196 ±
j176.9). The corresponding oscillation period is 2π/176.9 = 0.0355 s.
Based on the analysis of participation factor, the oscillation mode 14 is strongly related to the dc component of the submodule capacitor voltage. It indicates that the instability is due to the change of proportional coefficient kp1 of the outer dc voltage controller, which affects the dc component of submodule capacitor voltage, in turn causing oscillation mode 14 to move to the right half plane and causes instability.
Only the eigenvalues whose imaginary parts remain unchanged could cross into the right half plane, even if kp1 continues to increase. This indicates that with the dc-voltage control mode, the change of controller parameter kp1 will not change the unstable oscillation frequency of the MMC system.
When increasing the proportional coefficient
kp2 of inner current control loop with other parameters unchanged, as shown in
Figure 7b, oscillation modes 2, 3, 6, 7, 8, 10, 11 remain unchanged, which means that these eigenvalues will not be affected by the change of
kp2, and most of other oscillation modes move to the right. As
kp2 gradually increases, oscillation modes 5, 12, 13, and 15 move horizontally to the right, whose imaginary parts are nearly unchanged. Additionally, when
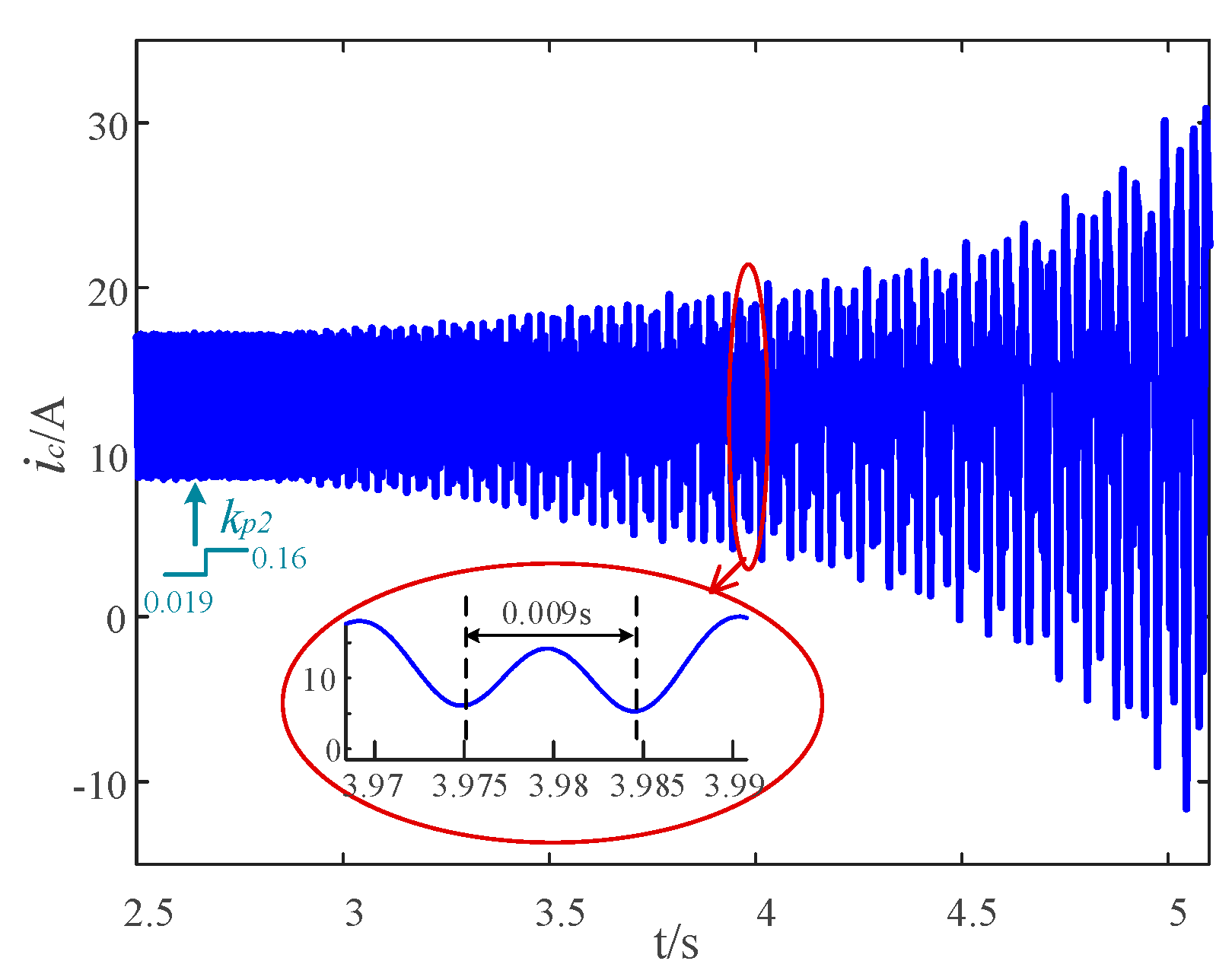
kp2 is 0.042, oscillation mode 12 firstly moves to the right half plane, which causes the instability of the system. For example, when
kp2 = 0.16, eigenvalues of oscillation mode 12 are (0.107 ±
j756.8). The corresponding oscillation period is 2π/756.8 = 0.0083 s.
The oscillating modes 12 is related to the third frequency component of the ac side current based on the analysis of participation factors. It indicates that the instability is due to the change of proportional coefficient kp2 of inner current controller, which affects the third frequency component of the ac side current, in turn causing the oscillation mode 12 to move to the right half plane and cause instability.
Even if kp2 continues to increase, only the eigenvalues whose imaginary parts remain unchanged could cross into the right half plane, which indicated that with the dc-voltage control mode, the change of controller parameter kp2 will also not change the unstable oscillation frequency of the MMC system.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}