True Amplitude Angle Gathers from Reverse Time Migration by Wavefield Decomposition at Excitation Amplitude Time

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Wavefield Decomposition in t–k Domain
2.2. Imaging in Angle Domain
3. Results
3.1. Angle Mesurement Analysis
3.2. Numerical Examples
3.2.1. Marmousi Model
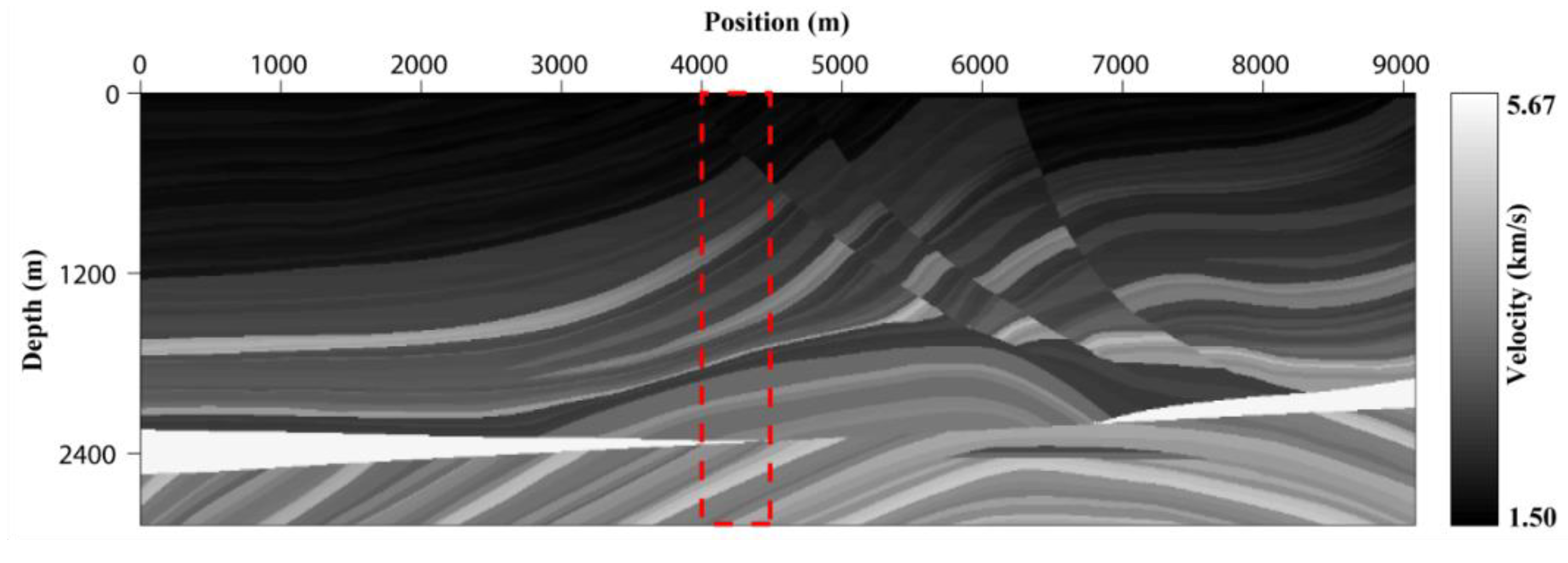
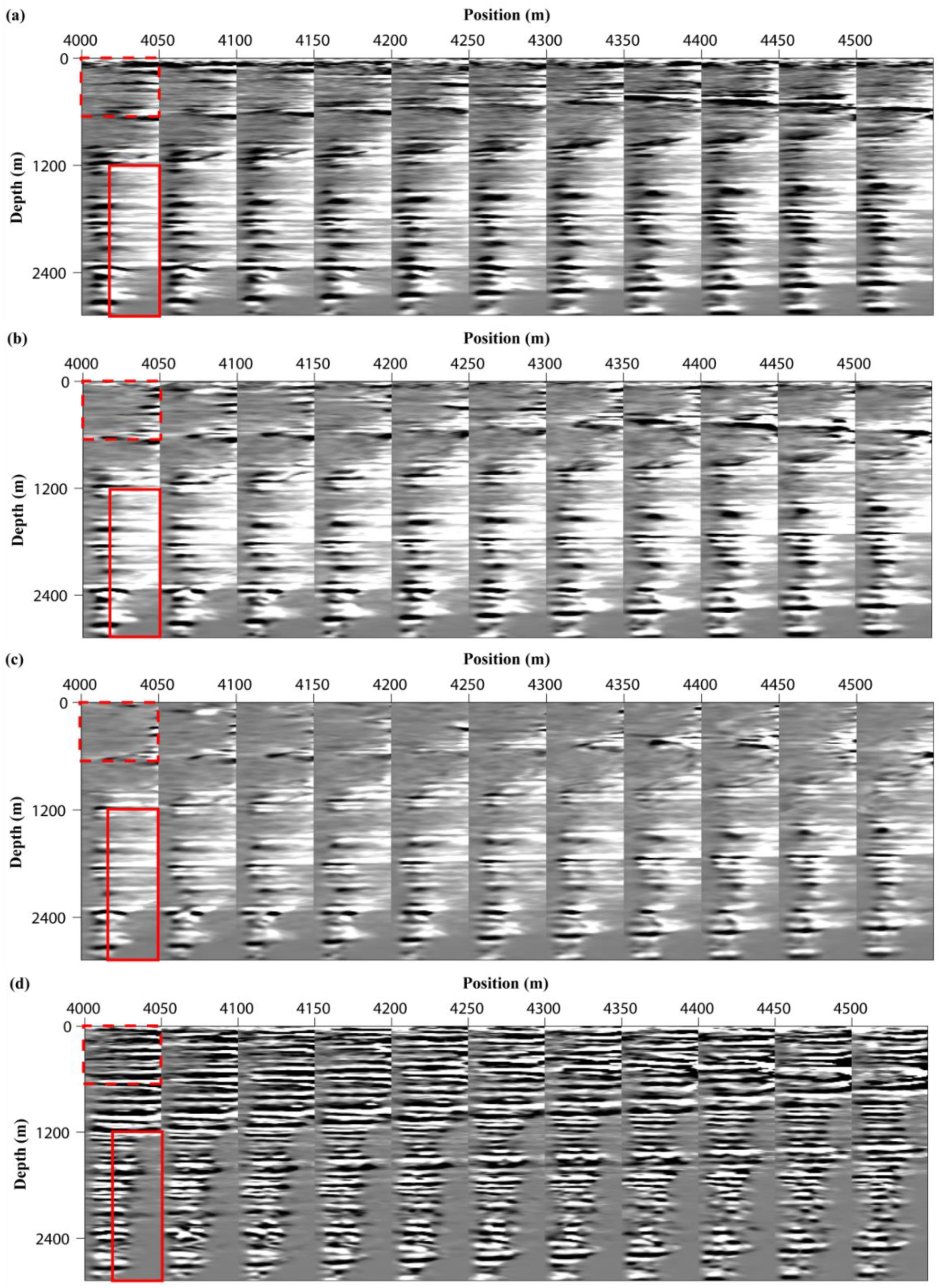
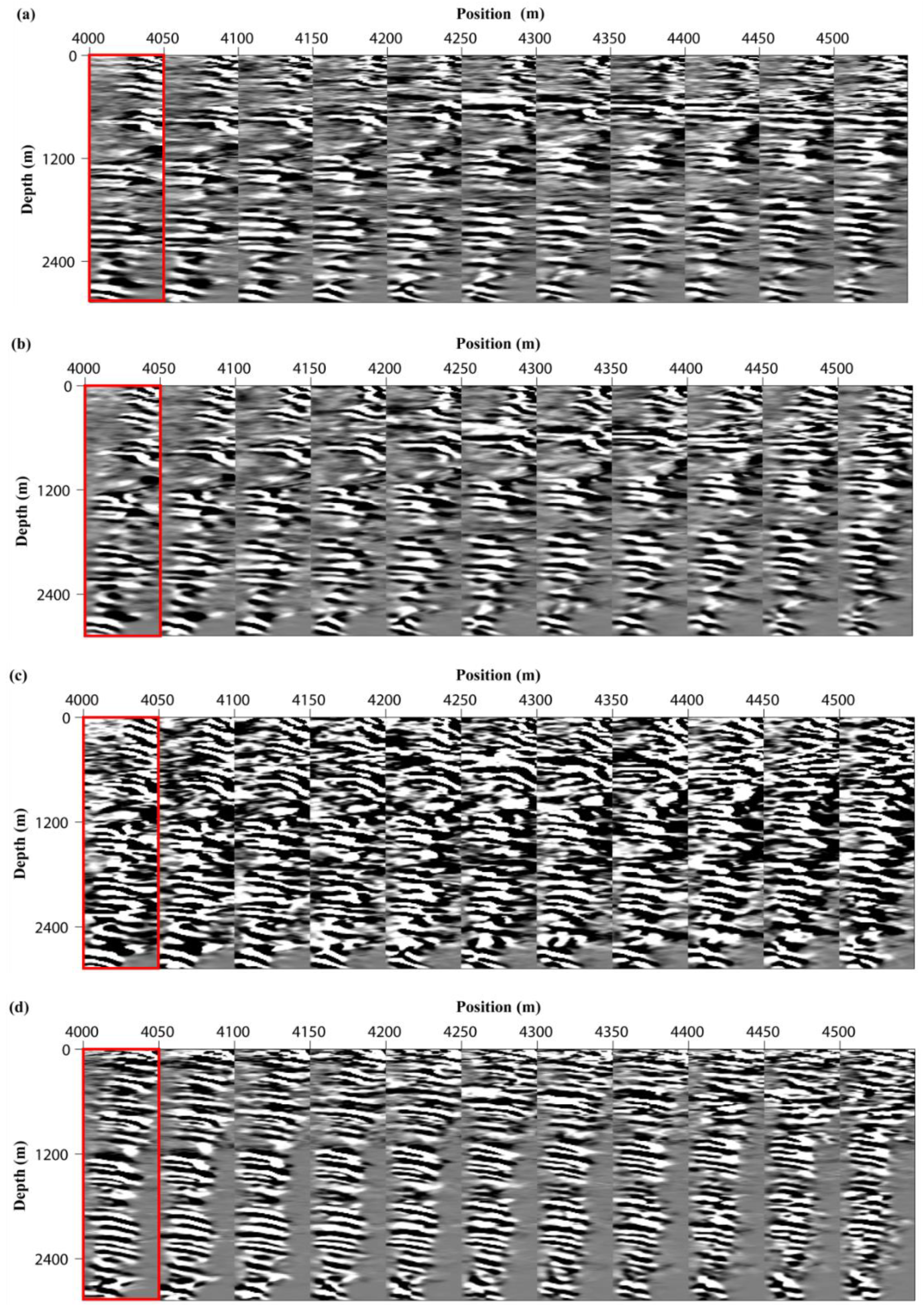
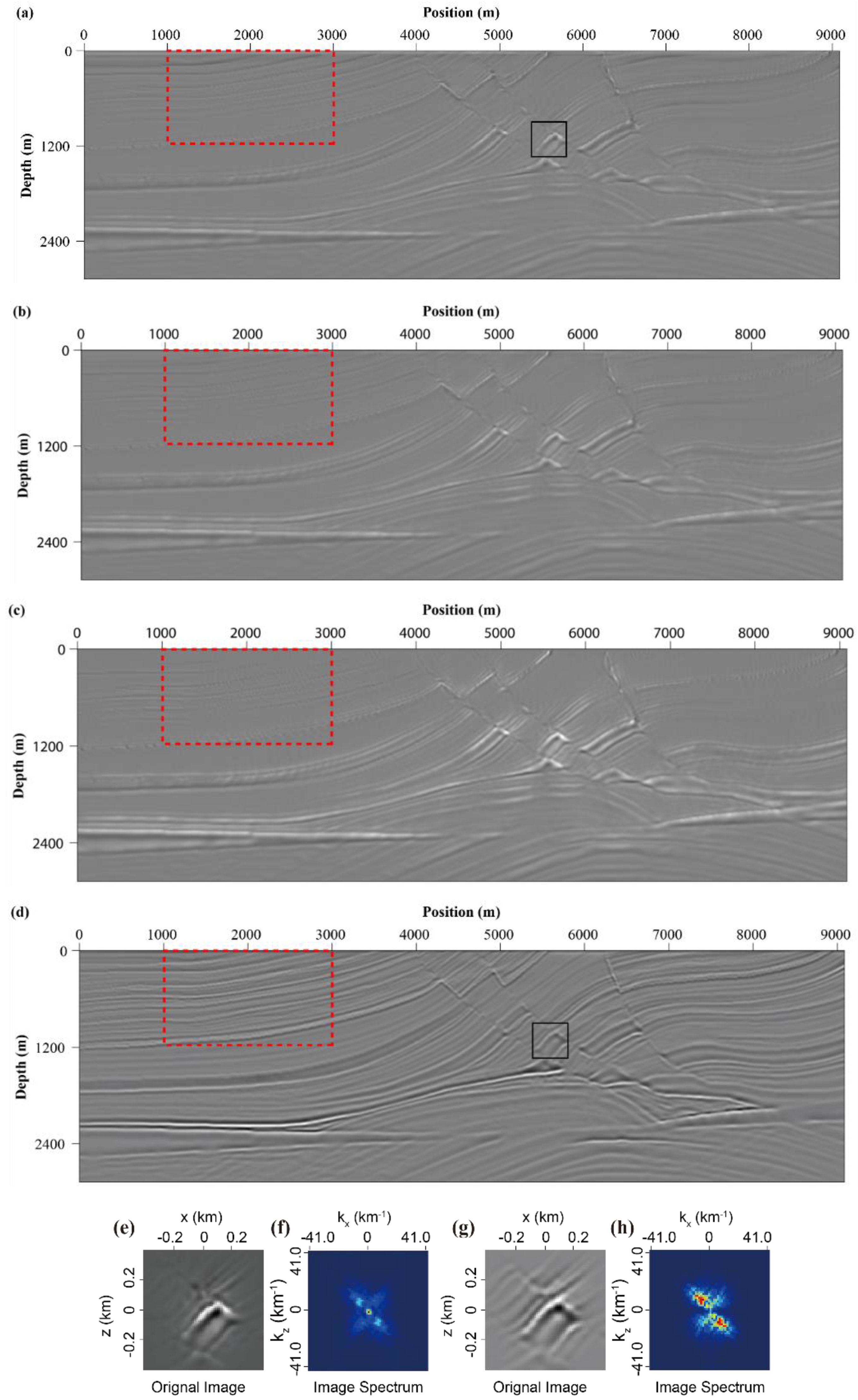
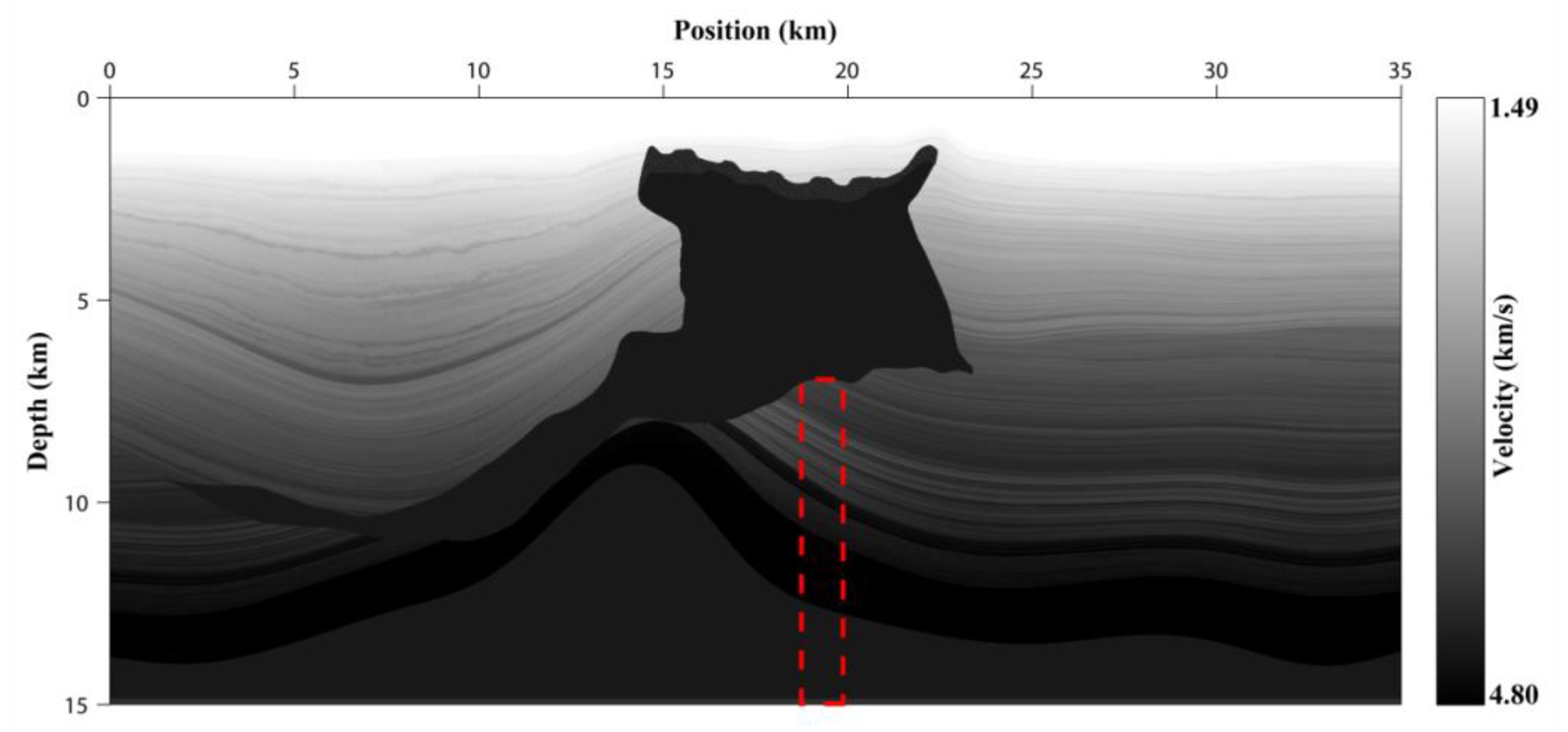
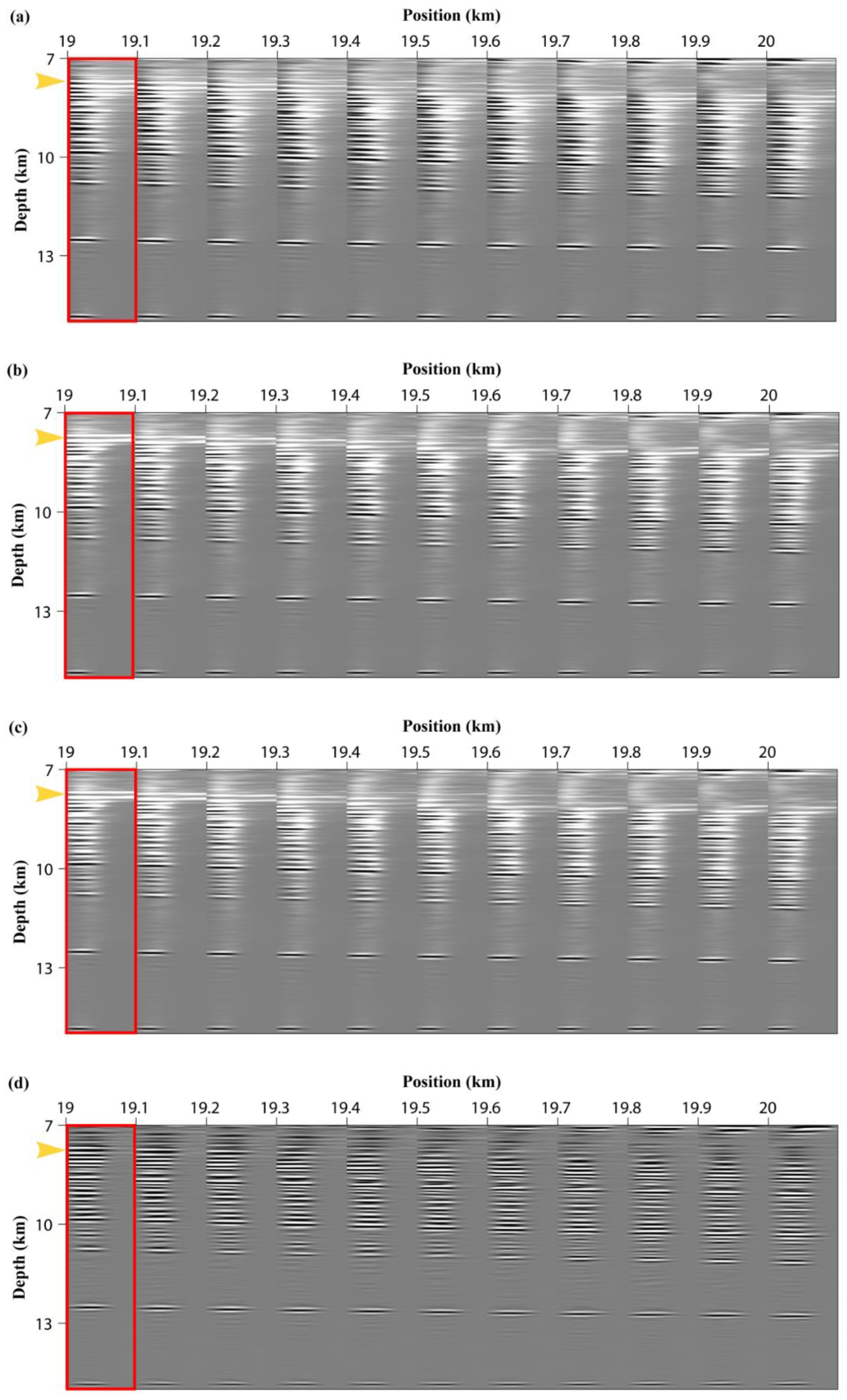
3.2.2. SEAM 2D Model
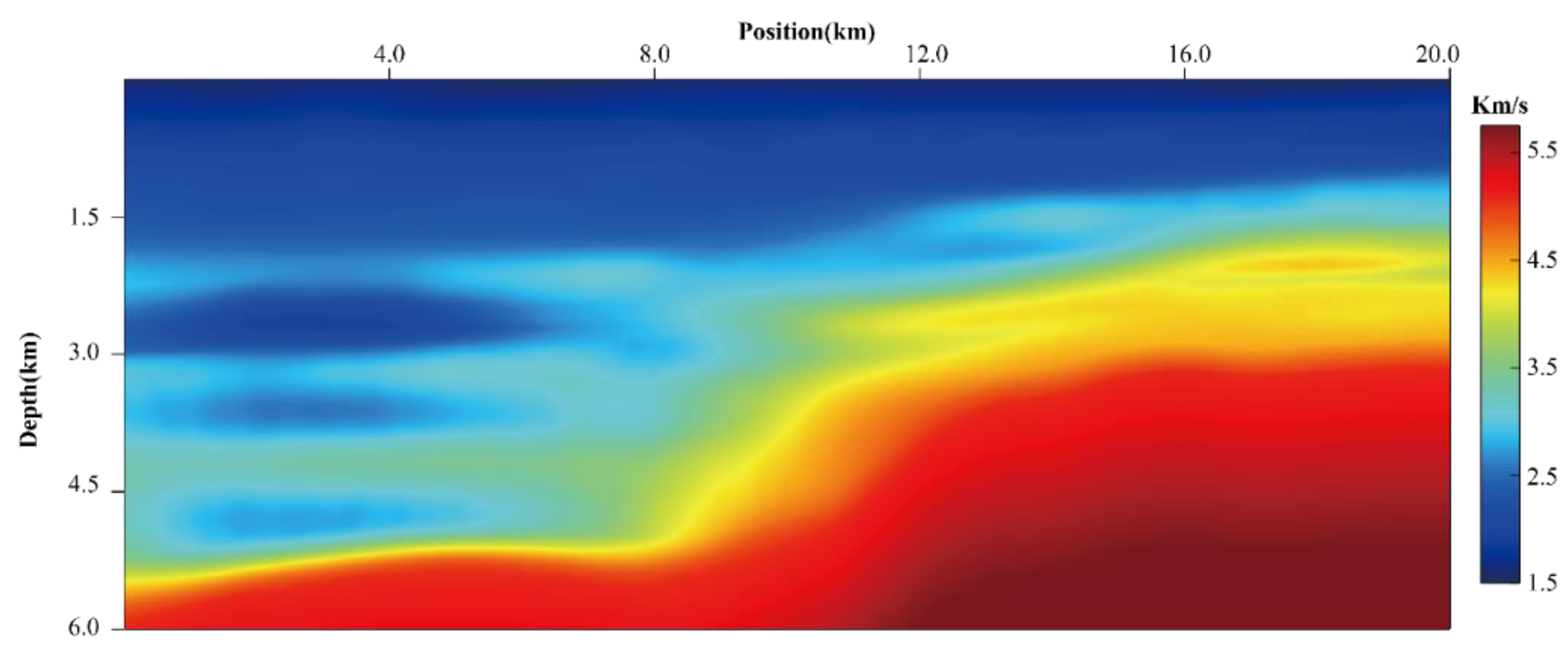
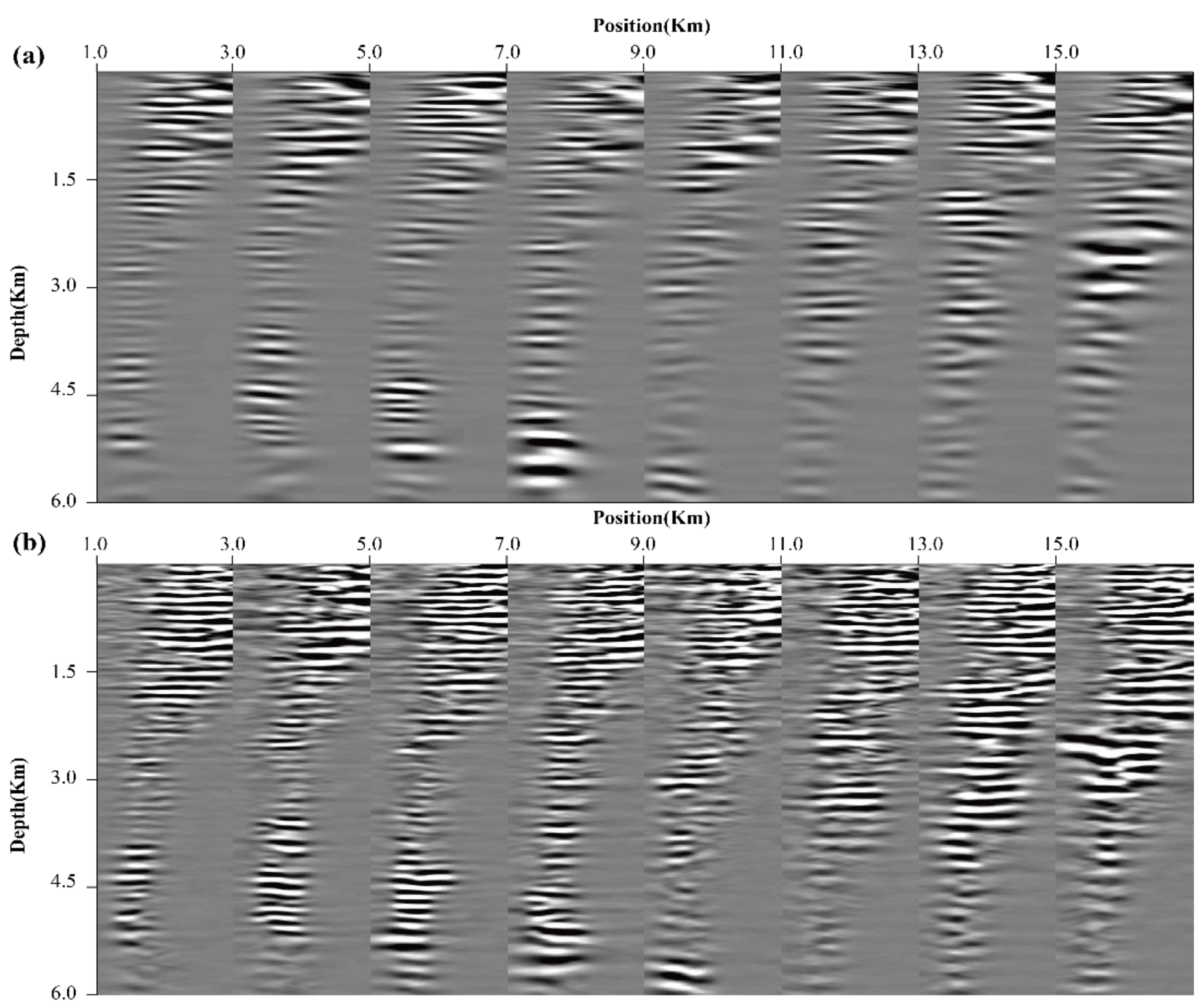
3.2.3. Field Data
3.3. Computational Issues
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fatti, J.L.; Smith, G.C.; Vail, P.J.; Strauss, P.J.; Levitt, P.R. Detection of gas in sandstone reservoirs using AVO analysis: A 3-D seismic case history using the Geostack technique. Geophysics 1994, 59, 1362–1376. [Google Scholar] [CrossRef]
- Shi, L.; Sun, Y.; Liu, Y.; Cova, D.; Liu, J. High-order AVO inversion for effective pore-fluid bulk modulus based on series reversion and bayesian theory. Energies 2020, 13, 1313. [Google Scholar] [CrossRef]
- Yang, Z.; Lu, J. Second-order approximation of the seismic reflection coefficient in thin interbeds. Energies 2020, 13, 1465. [Google Scholar] [CrossRef]
- Hoffmann, J. Illumination, resolution, and image quality of PP-and PS-waves for survey planning. Lead. Edge 2001, 20, 1008–1014. [Google Scholar] [CrossRef]
- Giboli, M.; Baina, R.; Nicoletis, L.; Duquet, B. Reverse Time Migration Surface Offset Gathers Part 1: A New Method to Produce ‘Classical’ common Image Gathers; SEG Expanded Abstracts: Las Vegas, NV, USA, 2012; pp. 1–5. [Google Scholar]
- Ma, C.; Gao, Y.; Lu, C. Numerical modeling of elastic wave in frequency-domain by using staggered grid fourth-order finite-difference scheme. Adv. Geo. Energy Res. 2019, 3, 410–423. [Google Scholar] [CrossRef]
- Xie, X.B.; Wu, R.S. Extracting Angle Domain Information from Migrated Wavefield; SEG Expanded Abstracts: Salt Lake City, UT, USA, 2002; pp. 1360–1363. [Google Scholar]
- Mao, J.; Wu, R.S.; Gao, J.H. Directional illumination analysis using the local exponential frame. Geophysics 2010, 75, S163–S174. [Google Scholar] [CrossRef]
- Yan, R.; Xie, X.B. An angle-domain imaging condition for elastic reverse time migration and its application to angle gather extraction. Geophysics 2012, 77, S105–S115. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, S.; Tang, B.; Bai, B.; Huang, Y.; Huang, T. Angle gathers from reverse time migration. Lead. Edge 2010, 29, 1364–1370. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Tang, B. 3D angle gathers from reverse time migration. Geophysics 2011, 76, S77–S92. [Google Scholar] [CrossRef]
- Yoon, K.; Marfurt, K.J. Reverse-time migration using the Poynting vector. Explor. Geophys. 2006, 37, 102–107. [Google Scholar] [CrossRef]
- Dickens, T.A.; Winbow, G.A. RTM Angle Gathers Using Poynting Vectors; SEG Expanded Abstracts: San Antonio, TX, USA, 2011; pp. 3109–3113. [Google Scholar]
- Yan, J.; Ross, W. Improving the Stability of Angle Gather Computation Using Poynting Vectors; SEG Expanded Abstracts: Houston, TX, USA, 2013; pp. 3784–3788. [Google Scholar]
- Tang, C.; McMechan, G.A. Multidirectional slowness vector for computing angle gathers from reverse time migration. Geophysics 2016, 81, S55–S68. [Google Scholar] [CrossRef]
- Yan, Z.; Xie, X.B. Full-wave seismic illumination and resolution analyses: A Poynting-vector-based method. Geophysics 2016, 81, S447–S458. [Google Scholar] [CrossRef]
- Yoon, K.; Guo, M.; Cai, J.; Wang, B. 3D RTM Angle Gathers from Source Wave Propagation Direction and Dip of Reflector; SEG Expanded Abstracts: San Antonio, TX, USA, 2011; pp. 3136–3140. [Google Scholar]
- Tang, C.; Wang, D.; Jiang, H. RTM Angle Gathers with Gaussian Weighted Time-Lapse Poynting Vectors and Receiver Wavefield Reconstruction in Forward Time Direction; SEG Expanded Abstracts: Houston, TX, USA, 2013; pp. 3779–3783. [Google Scholar]
- Vyas, M.; Du, X.; Mobley, E.; Fletcher, R. Methods for computing angle gathers using RTM. In 73rd EAGE Conference & Exhibition; European Association of Geoscientists & Engineers: Vienna, Austria, 2011; p. cp–238. [Google Scholar]
- Zhang, Q. RTM Angle Gathers and Specular Filter (SF) RTM Using Optical Flow; SEG Expanded Abstracts: Denver, CO, USA, 2014; pp. 3816–3820. [Google Scholar]
- Gong, T.; Nguyen, B.D.; McMechan, G.A. Polarized wavefield magnitudes with optical flow for elastic angle-domain common-image gathers. Geophysics 2016, 81, S239–S251. [Google Scholar] [CrossRef]
- Tang, Y.; Gu, H.; Liu, S.; Han, B. Angle Gathers from RTM Based on Excitation Time Representation for Isotropic and Anisotropic Media; SEG Expanded Abstracts: San Antonio, TX, USA, 2019; pp. 4351–4355. [Google Scholar]
- Tang, Y.; Gu, H.; Liu, S.; Han, B.; Liu, C. A stable and effective strategy for angle gather extraction from reverse time migration using traveltime gradient. Explor. Geophys. 2019, 50, 613–624. [Google Scholar] [CrossRef]
- Yan, R.; Xie, X.B. AVA Analysis Based on RTM Angle-Domain Common Image Gather; SEG Expanded Abstracts: Las Vegas, NV, USA, 2012; pp. 1–6. [Google Scholar]
- Liu, F.; Zhang, G.; Morton, S.A.; Leveille, J.P. An effective imaging condition for reverse-time migration using wavefield decomposition. Geophysics 2011, 76, S29–S39. [Google Scholar] [CrossRef]
- Wang, W.; McMechan, G.A.; Tang, C.; Xie, F. Up/down and P/S decompositions of elastic wavefield using complex seismic traces with applications to calculating Poynting vectors and angle-domain common-image gathers from reverse time migrations. Geophysics 2016, 81, S181–S194. [Google Scholar] [CrossRef]
- Hu, J.; Wang, H.; Wang, X. Angle gathers from reverse time migration using analytic wavefield propagation and decomposition in the time domain. Geophysics 2016, 81, S1–S9. [Google Scholar] [CrossRef]
- Kalita, M.; Alkhalifah, T. Common-image gathers using the excitation amplitude imaging condition. Geophysics 2016, 81, S261–S269. [Google Scholar] [CrossRef]
- Nguyen, B.D.; McMechan, G.A. Excitation amplitude imaging condition for prestack reverse-time migration. Geophysics 2013, 78, S37–S46. [Google Scholar] [CrossRef]
- Chang, W.F.; McMechan, G.A. Reverse-time migration of offset vertical seismic profiling data using the excitation-time imaging condition. Geophysics 1986, 51, 67–84. [Google Scholar] [CrossRef]
- Jin, H.; McMechan, G.A. Removing smearing-effect artifacts in angle-domain common-image gathers from reverse time migration. Geophysics 2015, 80, U13–U24. [Google Scholar] [CrossRef][Green Version]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Yang, Y.; Liu, S. True Amplitude Angle Gathers from Reverse Time Migration by Wavefield Decomposition at Excitation Amplitude Time. Energies 2020, 13, 6204. https://doi.org/10.3390/en13236204
Yan Z, Yang Y, Liu S. True Amplitude Angle Gathers from Reverse Time Migration by Wavefield Decomposition at Excitation Amplitude Time. Energies. 2020; 13(23):6204. https://doi.org/10.3390/en13236204
Chicago/Turabian StyleYan, Zhe, Yonglong Yang, and Shaoyong Liu. 2020. "True Amplitude Angle Gathers from Reverse Time Migration by Wavefield Decomposition at Excitation Amplitude Time" Energies 13, no. 23: 6204. https://doi.org/10.3390/en13236204
APA StyleYan, Z., Yang, Y., & Liu, S. (2020). True Amplitude Angle Gathers from Reverse Time Migration by Wavefield Decomposition at Excitation Amplitude Time. Energies, 13(23), 6204. https://doi.org/10.3390/en13236204