1. Introduction
In 2014, the EU raised the targets of reducing greenhouse gas (GHG) emissions by at least 40% and below the levels of 1990 by 2030, increasing the renewable energy share to 32% and improving energy efficiency by 32.5% [
1]. Accomplishing such a transformation is strongly related to the capability of local power systems to incorporate renewable energy technologies while keeping sufficient levels of security and reliability [
2]. Variable renewable energy sources (vRESs), i.e., wind and solar, have a levelized cost of energy (LCOE) of one-and-a-half to two-times less than dispatchable RESs [
3], presenting significant prospects of decreasing reliance on fossil fuel and GHG emissions in electric sectors. Efforts to reduce climate change impacts, governmental policies and end-user consciousness-raising led to increased deployments of vRES [
4]. At the same time, power systems undergo considerable change in operating requirements due to the stochastic nature of these technologies [
5].
The case is even more challenging for the non-interconnected island (NII) systems as they have unique features associated with their small size, low inertia, lack of external interconnections and usually high-power generation share of RES [
6]. The stability of NII systems of various scales has been engaged in the research field. Several studies have been conducted since they have the potential to become places of demonstration and act as testbeds for solutions for which value is difficult to demonstrate in larger systems.
A promising solution mitigating these stability problems is the integration of energy storage systems such as batteries, supercapacitors and flywheels. Battery energy storage systems (BESSs) in particular can provide a variety of services to the grid, such as frequency control [
7,
8,
9], voltage control in the distribution grid [
10,
11,
12] and energy management services [
13,
14,
15].
Although several studies have investigated the provision of ancillary services by BESSs in macro- and microgrids, studies regarding NII systems are sparse despite the weightier interest from the stability point of view. More particularly, in [
16], a scheme for an enabling technology that capitalizes on the advantages of both battery energy storage and synchronous generation by combining a synchronous condenser with a battery was proposed and demonstrated in Australia’s King Island. A similar study has been conducted for the Seychelles islands [
17], where solutions such as demand-side management (DSM) and diesel generators’ brief operation at lower turn-down rates—enabling the compensation of abrupt decreases of photovoltaic (PV) power generation by adding spinning reserves to the system—were evaluated. A concept combining wind and pumped storage power production, along with the appropriate operation strategy, was introduced in [
18] to support El Hierro’s power grid. This concept is based on the inertial energy and reactive current to maintain stability in cases of large disturbances. Similarly, several studies have been carried out for the Bornholm island in Denmark. Specifically, Cha et al. [
19] proposed a coordinated control scheme where batteries were used to supply frequency support as a fast-acting primary control and a microgrid management system acted as a second primary reserve to assist in keeping a constant frequency and voltage under islanding operation mode. Pillai et al. [
20] proposed that EV battery storages can support the grid during frequency events by controlling their charging rate. Furthermore, in [
21], the integration of BESS for mitigating inertia and primary frequency control issues in Sardinia island, Italy, is addressed. For similar studies, refer to [
22,
23,
24,
25,
26].
The presented literature survey shows that the number of studies regarding insular NII power systems is limited. Moreover, in these works, proprietary software is utilized for conducting simulations, preventing the reader from replicating or improving the experiments. Another important point to remark is that many of these studies incorporate root mean square (RMS) modeling instead of EMT, which is crucial for low-inertia grid studies, since RMS simulations cannot always predict instabilities [
27].
Dynamic models used in stability simulations are critical components of the system’s reliability assessment in planning and operational horizons [
28]. Commercial proprietary tools, namely PowerFactory, NEPLAN, PSS
®E, etc., offer automated calculations with closed “black box” models. On the contrary, a more transparent approach can be implemented using the Modelica language [
29], allowing the simulators to customize real operating parameters and strategies in more detail. Modelica is an object-oriented, declarative, multidomain modeling language for the component-oriented modeling of complex systems. Users can define custom models utilizing its acausal equation-based nature. Modelica environments include open-source environments like OpenModelica [
30] and proprietary environments like Dymola, SystemModeler, SimulationX, etc. Several open-source power system libraries have been developed, and a review can be found in [
31]. The main noteworthy Modelica libraries for electric power systems modeling studies are PowerSystems [
32] and OpenIPSL [
33]. However, few simulation studies dedicated to islanded high-RES systems problems have been conducted using Modelica so far.
The scope of the study presented in this paper is twofold: (i) to examine the impact of the vRES penetration increase on frequency stability in a large NII system, and (ii) propose an effective solution to the frequency stability issue by utilizing a battery storage system. The island system under consideration is Madeira of Portugal, located in the Pacific Ocean, 520 km west of Morocco. Madeira constitutes a NII system with a yearly peak load of 134 MW
e and incorporates various renewable sources in its energy mix. Furthermore, the island belongs to the innovator islands in terms of energy transition, and, in the near future, there are extension plans for the introduction of a high percentage of intermittent generation capacities into the HV/MV grid, supported by energy storage units [
34,
35,
36]. For all these characteristics, Madeira’s power system is a considerably valuable case study.
The main novel aspects of the present study include:
The transient modeling of a complex NII power system with a wide range of renewable and conventional power generation units, utilizing exclusively open-source software. This feature enhances the innovative character of the current work, as the value of open-source software for power systems’ simulations has already been emphasized by the research community [
37]. There are no publications of such complex real systems without using a commercial package, making this paper innovative.
A novel methodological approach for the impact assessment of high-RES penetration on the island’s frequency stability. This approach involves examining both the current and future states in terms of stability and considering all the additional RES capacities with the simultaneous reduction of fossil-based plant capacity. Furthermore, power flow analysis is incorporated as an ancillary step in the scenario determination procedure to identify extreme cases in terms of the online inertia and primary frequency reserves. The final part of the methodological approach regards the conduction of transient simulations for disturbances such as rapid load changes and the tripping of generation units and short-circuits. The comparative analysis of the results reveals the impact of increased vRES capacities, decreased inertia and limited primary frequency reserves on the system’s stability.
The consideration of energy storage technologies (BESS, FESS) to address the revealed instabilities in future low-inertia scenarios.
The following approach revealed the presence of stability issues in the future high-RES scenario. These issues are tackled by considering a BESS that contributes to power system inertia and primary frequency ancillary services, ensuring frequency stability. Simulations demonstrate the crucial role that such systems will play, along with the continuous increase of vRES deployment in order to support the frequency in contingency events. Additionally, a short comparison between BESS and a flywheel energy storage system (FESS) is investigated in terms of response time.
This paper is structured as follows: In
Section 2, a description of the methodology used, scenarios considered and proposed BESS is presented.
Section 3 presents a detailed description of Madeira’s power system as it is currently and in the near future after the scheduled installation of new RES plants. Finally,
Section 4 includes the dynamic simulation results accompanied by the relevant discussion.
2. Theoretical Background
2.1. Frequency Control Ancillary Services
Frequency stability concerns the ability of the system to maintain a steady frequency after a severe system upset, leading to a considerable imbalance between power production and demand. Traditionally, the subject of frequency stability was closely related to the operation of SGs, as they were predominant generation units. SGs present particular features that have greatly affected power system planning and operation since the introduction of electric machinery. From a physics standpoint, the turbine system and rotating components of each machine present mechanical inertia, and therefore, they are able to store kinetic energy in this rotating mass. Because energy can be withdrawn by or directed to these rotating masses during system disturbances, a system of machines is capable of adequately responding to fluctuations in net load and generation [
38]. Furthermore, the active power of a SG can be controlled through the shaft torque. To ensure the resilience of a power system, its frequency is tightly adjusted by a combination of fast-acting closed-loop controllers at each machine (primary frequency response through governor controls), which are constantly controlling the machine’s mechanical power [
39].
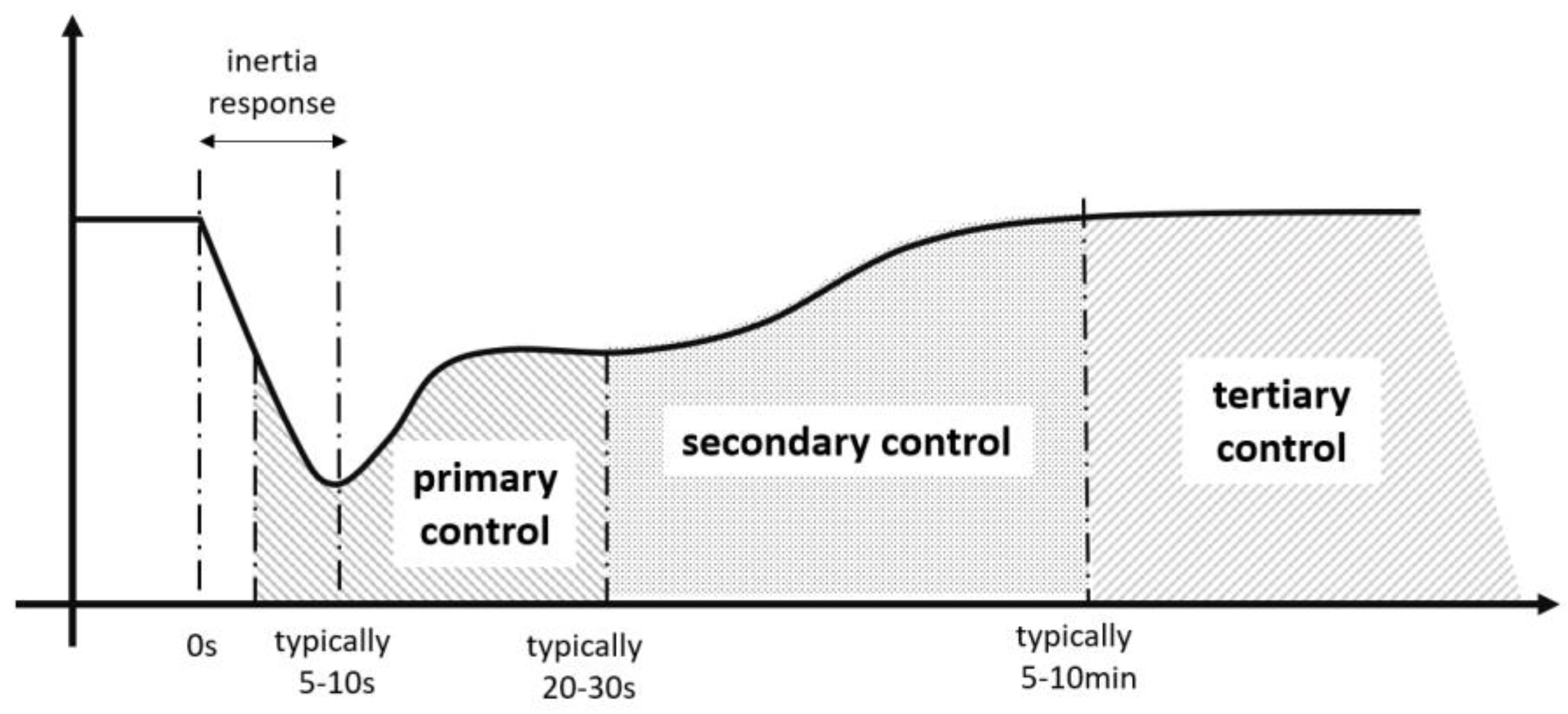
Figure 1 presents a typical frequency response of generation loss. Three main areas can be distinguished, namely inertia response, primary frequency control and secondary frequency control. Each area corresponds to different transient phenomena which require the provision of corresponding ancillary services.
Based on this categorization, conventional power plants (e.g., hydro, gas, coal) can offer the following frequency control ancillary services:
Inertia response [
40]: Because of the synchronous coupling of the machines with the grid, their rotational speed (i.e.,
ωm) is aligned with the angular velocity of the electromagnetic field (i.e.,
ωe). When a disturbance occurs leading to an imbalance between the two opposing torques, their sum on the rotor is nonzero, resulting in acceleration or deceleration according to the electromechanical swing equation (Equation (1)):
where
J represents the combined moment of inertia of the generator and the turbine (kg·m
2),
Tm and
Te represent mechanical and electrical torque, respectively (N·m) and
Ta represents acceleration/deceleration torque (N·m). From the above equation, it can be deduced that mitigating the effect of power imbalances in terms of the rate of change of frequency (RoCoF) can be realized by enhancing the system’s rotational inertia, utilizing fast reserves with RoCoF-based control.
RoCoF is a key variable in the inertia response, defined as the time derivative of the power system frequency (
df/
dt). This variable was considered of low importance for systems with a generation mix dominated by synchronous generators due to the high inertia presence, which inherently compensates load imbalances and checks RoCoF in these cases. Recently, RoCoF has become important during considerable load–generation imbalances (attributed to the disconnection of either large loads or generators or system splits), as higher RoCoF values may be detected. This is due to low system inertia in cases of high instantaneous penetration of inverter-based units that are not synchronously connected to generation facilities. High
df/
dt values may threaten reliable system operation because of mechanical limitations of individual synchronous machines (inherent capability), protection devices triggered by a particular RoCoF threshold value or timing issues related to load-shedding schemes [
41].
Inverter-based generation lacking any control does not exhibit such inherent characteristics; consequently, high inverter penetration could result in higher df/dt values in a power system. The relationship between inverter penetration and RoCoF is, however, not straightforward and countermeasures, mostly in the form of control algorithms, need to be implemented carefully.
Primary control-droop control [
42]: The coupling of active power to frequency forms the basis of frequency control where active power is adjusted according to linear characteristics, based on the following control equation (Equation (2)):
where
f is the system frequency,
f0 the nominal frequency,
rp the droop gain,
P is the active power of the unit and
P0 to the initial active power.
Secondary control: The secondary control is responsible for restoring the frequency value to nominal (i.e., 50 or 60 Hz). This operation is needed, as the new operating point gained by the primary control has a steady-state frequency error, which must be reset. This method of control is called secondary control and is achieved through an integrator.
2.2. BESS Primary Frequency Ancillary Services
As already explained, the replacement of SGs with inverter-based RESs results in low inertia, as inverters provide small or zero inertia to the system due to their nonsynchronous connection to the grid and primary reserves reduction. The replacement of conventional units by inverter-based RES units reduces the number of units contributing to frequency support. To compensate for these effects, battery storage systems can assist primary frequency regulation with the appropriate control implementation in the inverter units. The general aim of the implemented inverter control through which the BESS interfaces with the grid is to modulate battery behavior to act as a synchronous generator in the event of a frequency change.
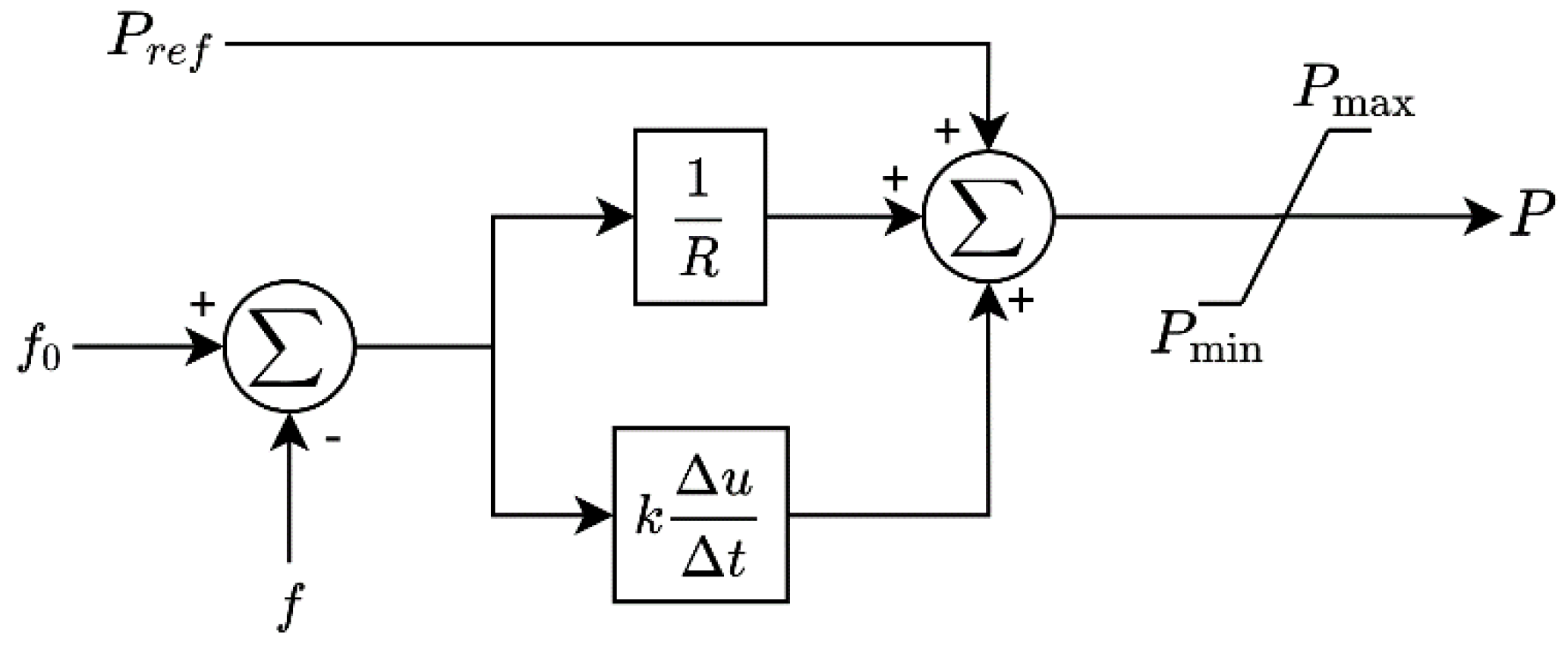
Since BESSs are capable of absorbing and delivering real power to the grid, they can offer ancillary services by properly controlling the inverter interfaced to the grid. This paper focuses only on inertial response and droop control, which are power-based services. The main challenge is to maintain a steady-state frequency in an acceptable value after disturbances.
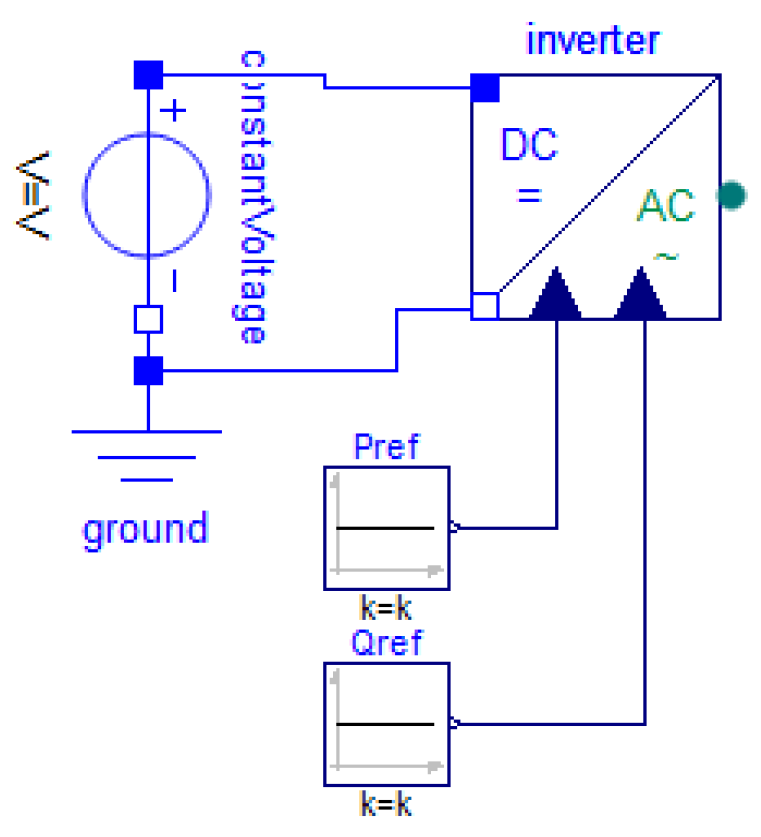
Figure 2 presents the schematic diagram for the BESS control that can provide the required services. Besides the setpoint for the active power (
Pref), the control also receives a signal for the system frequency (
f), which is compared with the nominal value (
f0) to compute the error. The error signal is routed through proportional and derivative sides, implementing droop and synthetic inertia control, respectively. For parameters, it receives two gains: one for the droop control (
R) and one for the inertia response (
k) [
43], as well as the limits for the rated power exchange (
Pmax and
Pmin).
3. Methodology
A custom methodology was utilized to evaluate the impact of increasing RES penetration in the Madeira island system. The approach is schematically depicted in
Figure 3 and includes the following steps.
Initially, two scenarios are defined based on the current state of the power system (“reference scenario”) and the planned future case of the system (“future scenario”), the latter including the additional variable RES capacities. The two scenarios were modeled in Matpower [
44] and simulations were carried out utilizing the optimal power flow (OPF) engine. Through power flow analysis over a one-year period, the resulting dispatches are analyzed. For each one, extreme cases (best and worst) are identified with respect to the online instantaneous rotational inertia and available primary reserve. The rationale behind this calculation is to identify the time at which maximum RES penetration (low demand and high RES production) is observed. When the grid’s stability is maintained in the worst case, the robustness of the grid in the examined scenario is verified.
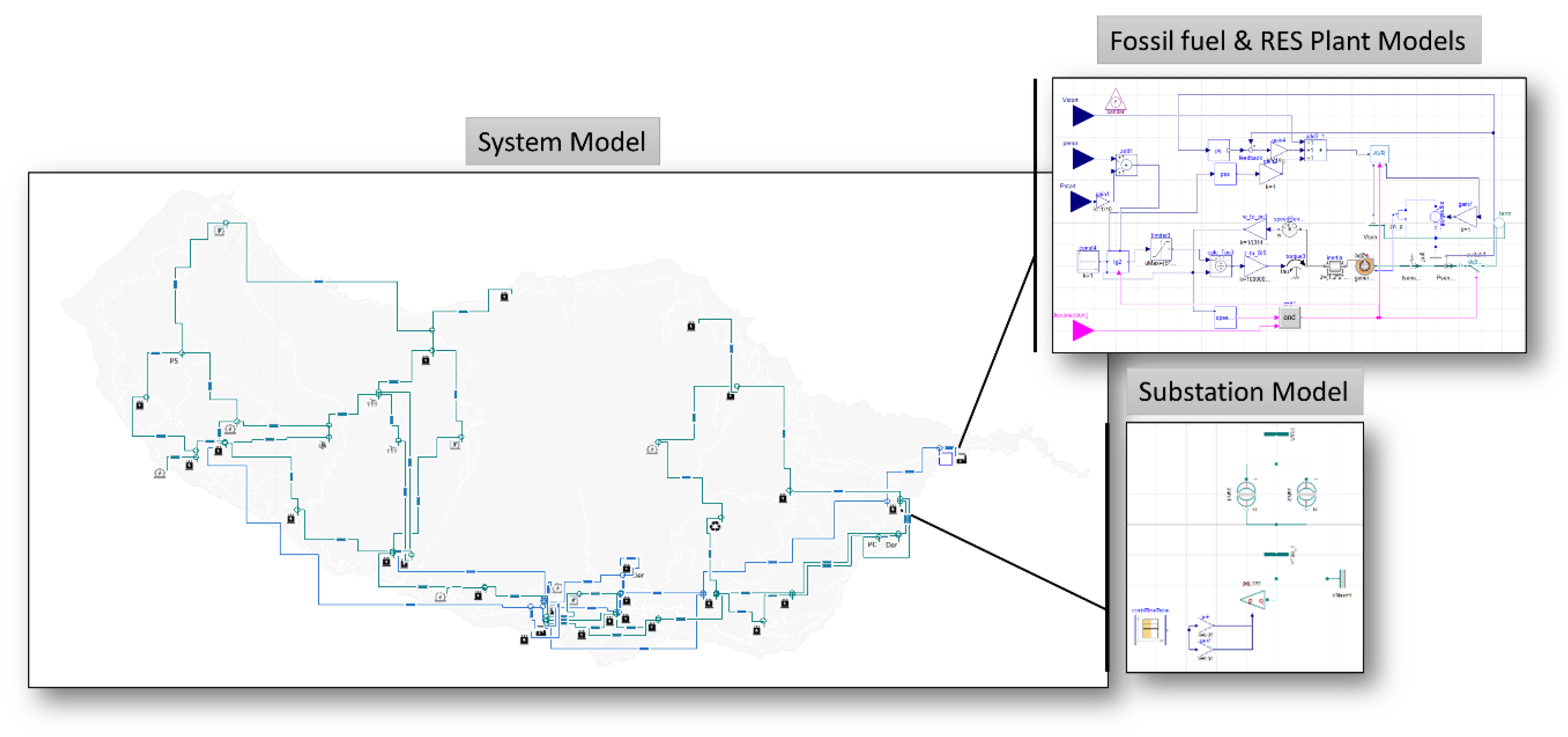
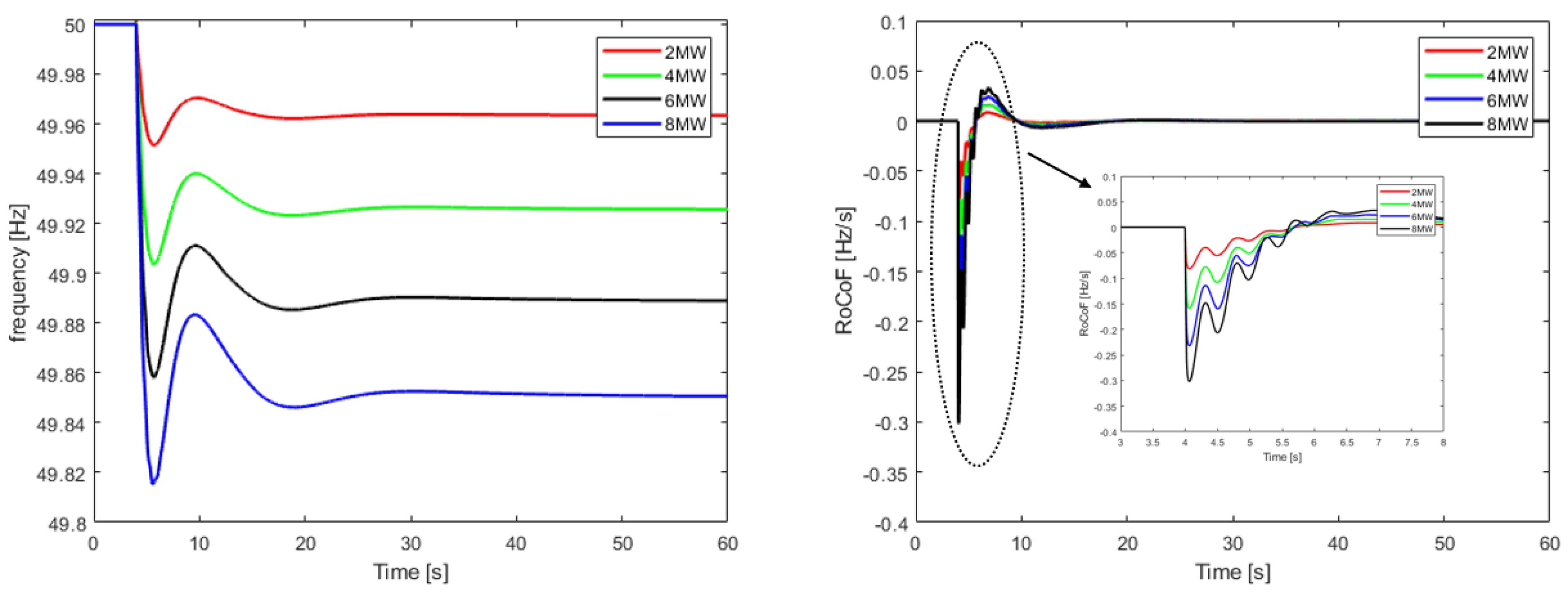
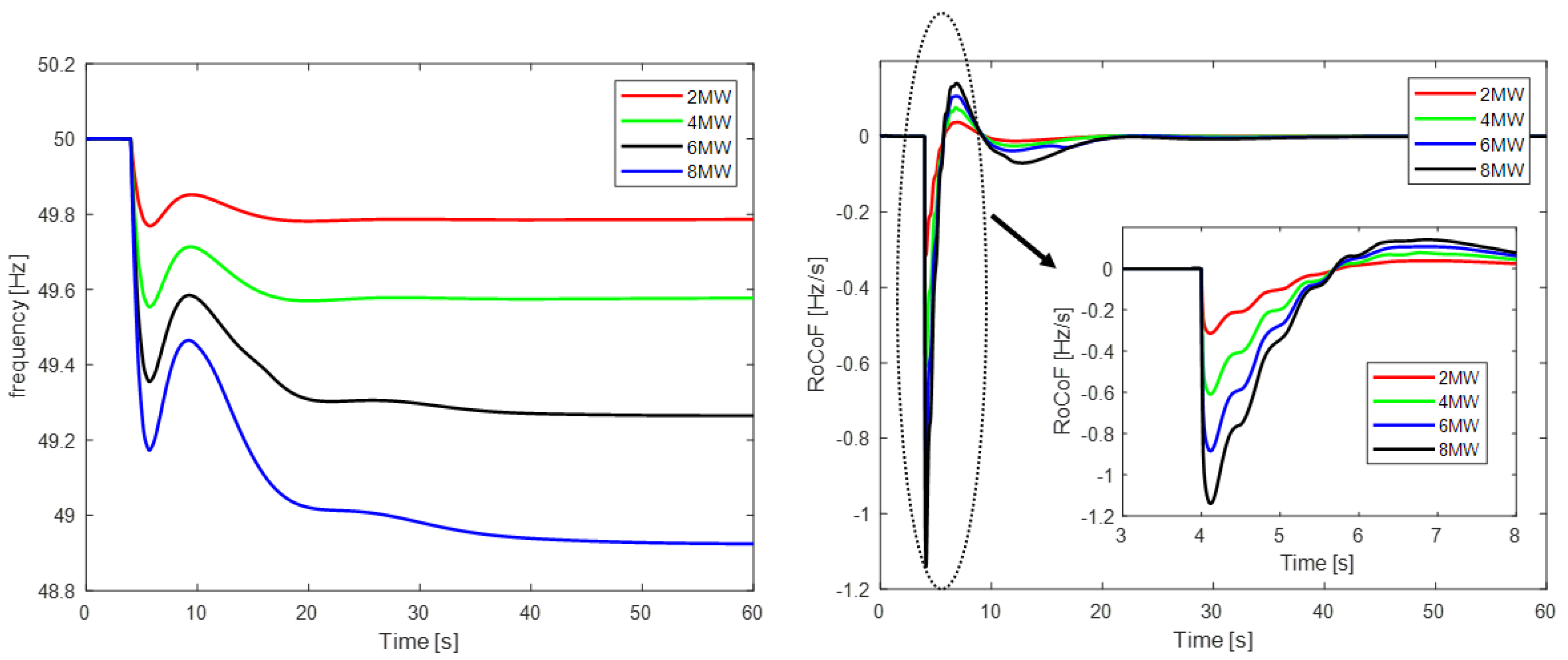
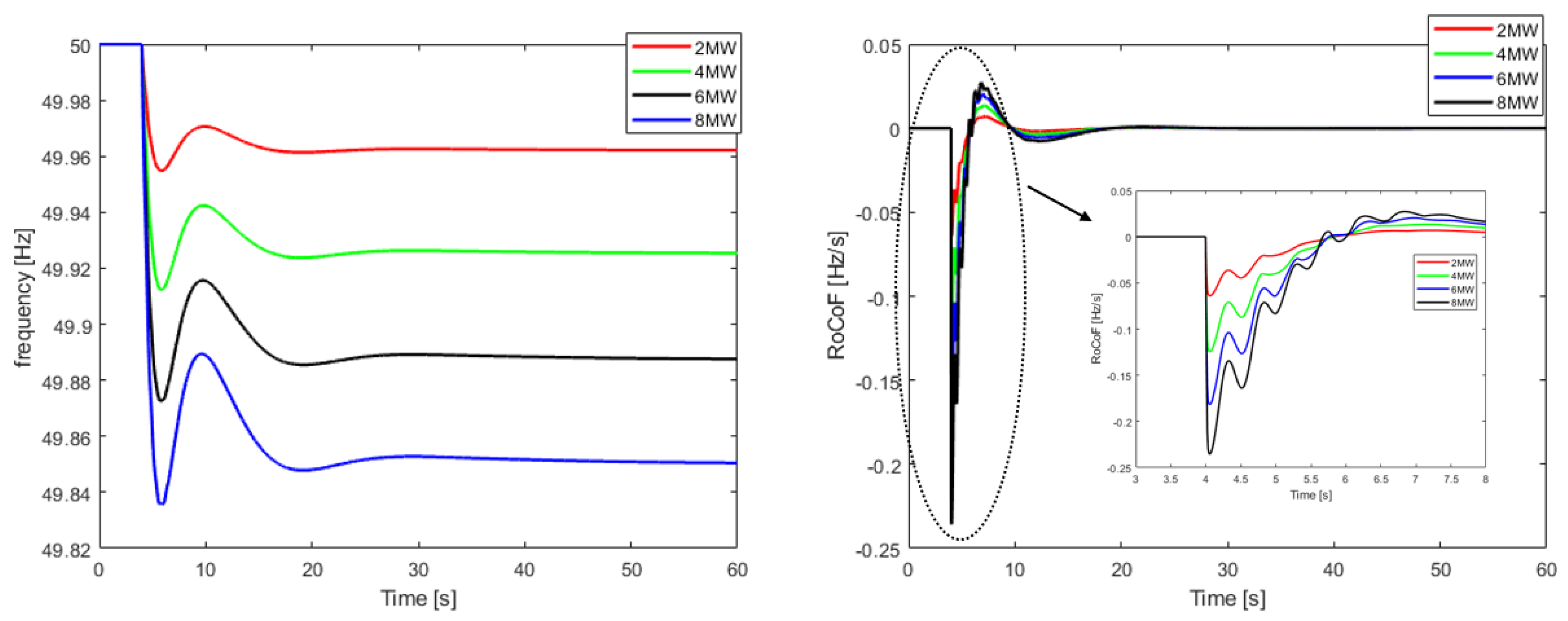
The next step includes transient grid modeling in Modelica and simulation conduction for each case and the three disturbances examined, namely “load sudden change (2–8 MWe with a step of 2 MWe),” “short-circuit (SC)” of a transmission line 60 kV with the requirement of a 100 ms clearance time and “loss of the island’s second-largest production unit online.” After the evaluation and comparison of the results, a third scenario is considered, which corresponds to the future scenario with the additional integration of a BESS to mitigate the frequency stability issues that are revealed in the high-RES case. Lastly, the results are thoroughly assessed and taken into account in the decision-making process in the context of the long-term planning of the island’s power system.
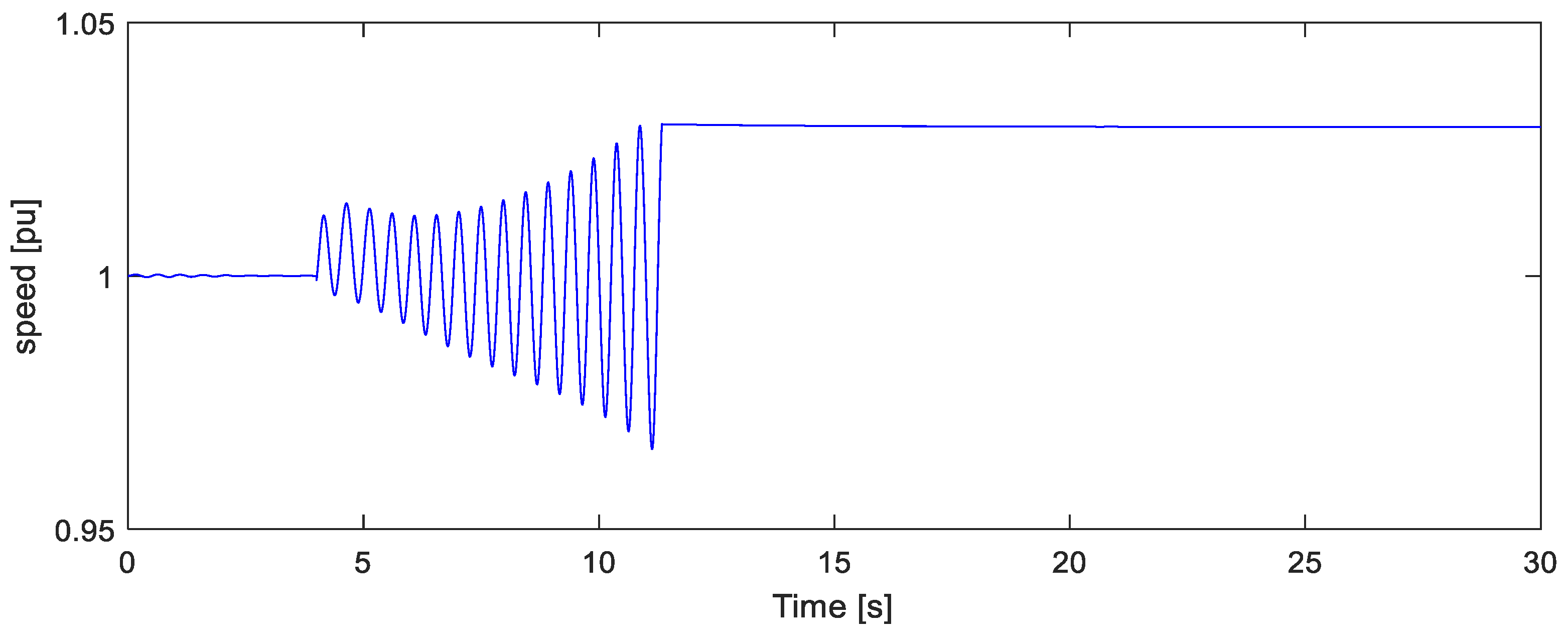
At this point, it is worth noting that the simulated model does not contain any underfrequency shedding relays, which may activate during severe transients. However, a relay is included on every SG, which activates when the generator speed is higher than 1.03 pu or lower than 0.92 pu (overfrequency/underfrequency relay).
A critical security constraint for the Madeira system is the need to avoid automatic underfrequency load-shedding situations [
45]. Specifically, it is assumed that load-shedding occurs if the RoCoF is lower than −1.5 Hz/s and the absolute frequency value is lower than 49 Hz [
46].
4. System Description and Scenarios Definition
The present section aims to introduce the investigated power system to the reader by gathering its main operational components for production and consumption, as well as some passive elements, while avoiding a lengthy detailed description of each asset, for which the reader can refer to [
47].
Madeira’s power system has a yearly load peak of approximately 134 MW
e. Its generation fleet is composed of two thermal plants, nine hydro plants, one pump-hydro plant, one solid-waste plant and a number of wind turbines (WTs) and photovoltaic (PV) parks, as well as some distributed PV generation rooftop-mounted systems [
48].
Table 1 summarizes the installed power for all generation units per type, along with the number of generating units for conventional power plants.
Regarding the passive grid components that are incorporated in the developed model, the following aspects are considered:
A set of 11 busses at the 60 kV level, 35 at the 30 kV level and 27 at the 6.6 kV level (73 in total).
A set of 57 transmission lines (or cables) with their appropriate parameters, 13 at the 60 kV and 44 at the 30 kV level (114 in total).
Forty-six transformers: 6: 60 kV/30 kV, 6: 60 kV/6.6 kV, 21: 30 kV/6.6 kV, 4: 6.6 kV/60 kV and 9: 6.6 kV/30 kV.
The future scenario has been elaborated in communication with the Madeira’s system operator, Eletricidade da Madeira, S.A. (EEM), and incorporates specific actions towards the energy transition of the island. An existing power plant will be entirely renovated in this framework, and an additional pumped-hydro plant will be constructed. Furthermore, the installed vRES power will be increased. The existing wind farm capacities will be extended, new solar plants will be created and the energy production from solar PV microproducers will be increased. Additionally, a BESS is planned to be installed in the central substation (60 kV), mainly providing ancillary services (primary, secondary frequency control and synthetic inertia response). Dedicated studies regarding the sizing of the BESS in Madeira have been performed [
34,
35,
36] and their results were adopted in the context of the present study, considering a BESS of 10 MWh
e and 15 MW
e. In this study, the future scenario is investigated considering the inclusion and nonuse of the BESS, aiming to examine the battery’s impact on the grid. Although the battery’s location has been indicated by EMM, this option was further examined with the conduction of several simulations with the BESS installed in different busses. The simulations proved that the location of the BESS was irrelevant to its performance during disturbances.
Table 2 gathers the new total installed capacities per technology.
5. Case Definition
Following the definition of reference and future scenarios, this section elaborates on the identification of the examined cases. As mentioned in
Section 3, yearly OPF simulations were conducted for both scenarios to reveal the best and worst cases in terms of online instantaneous rotational inertia and available primary reserve. The only difference regarding the optimal dispatch formulation between the two scenarios is that, in the reference case, there is a requirement of 30 MW
e minimum thermal production to ensure the system’s stability, which translates into a considerable RES curtailment mainly during the night hours. This restriction is not present in the future scenario, as the BESS is responsible for securing the power system operation.
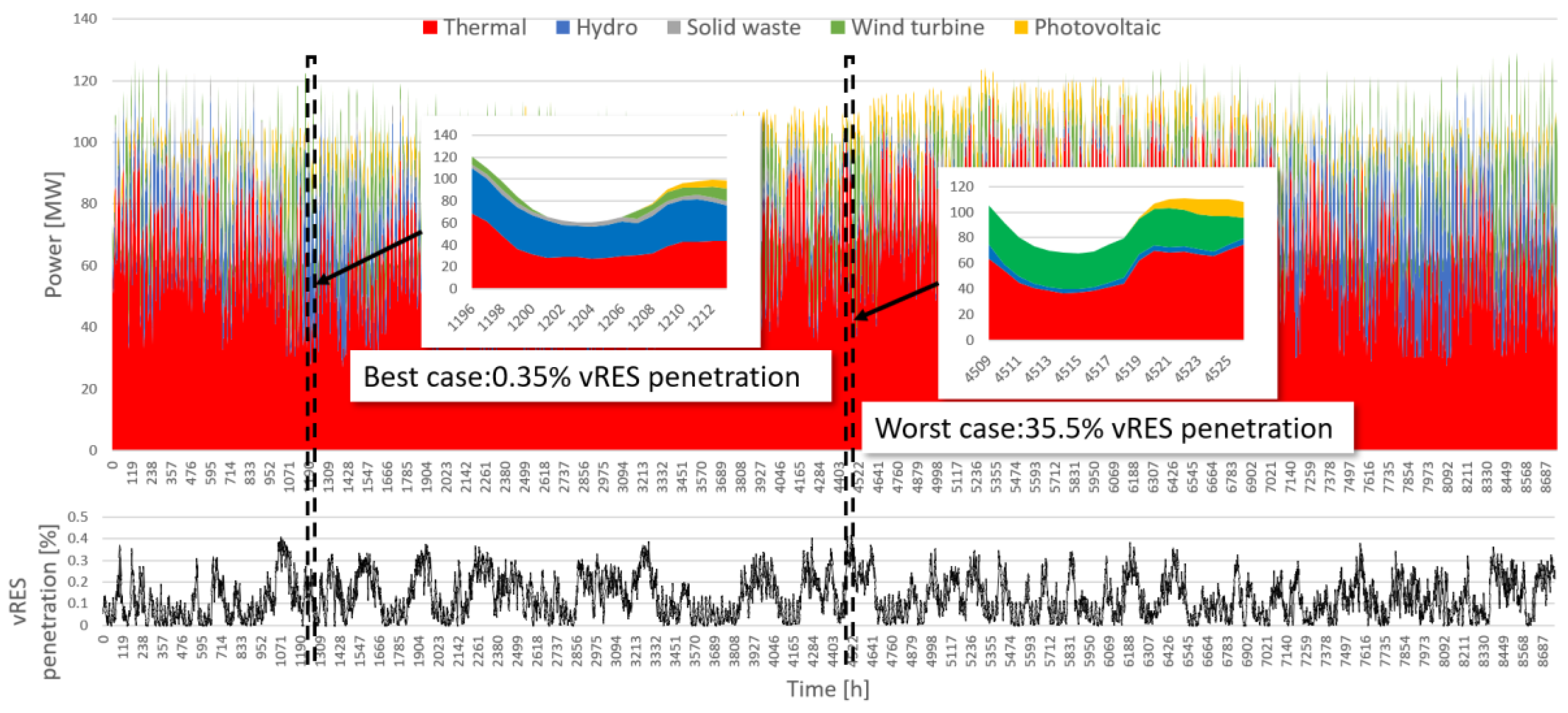
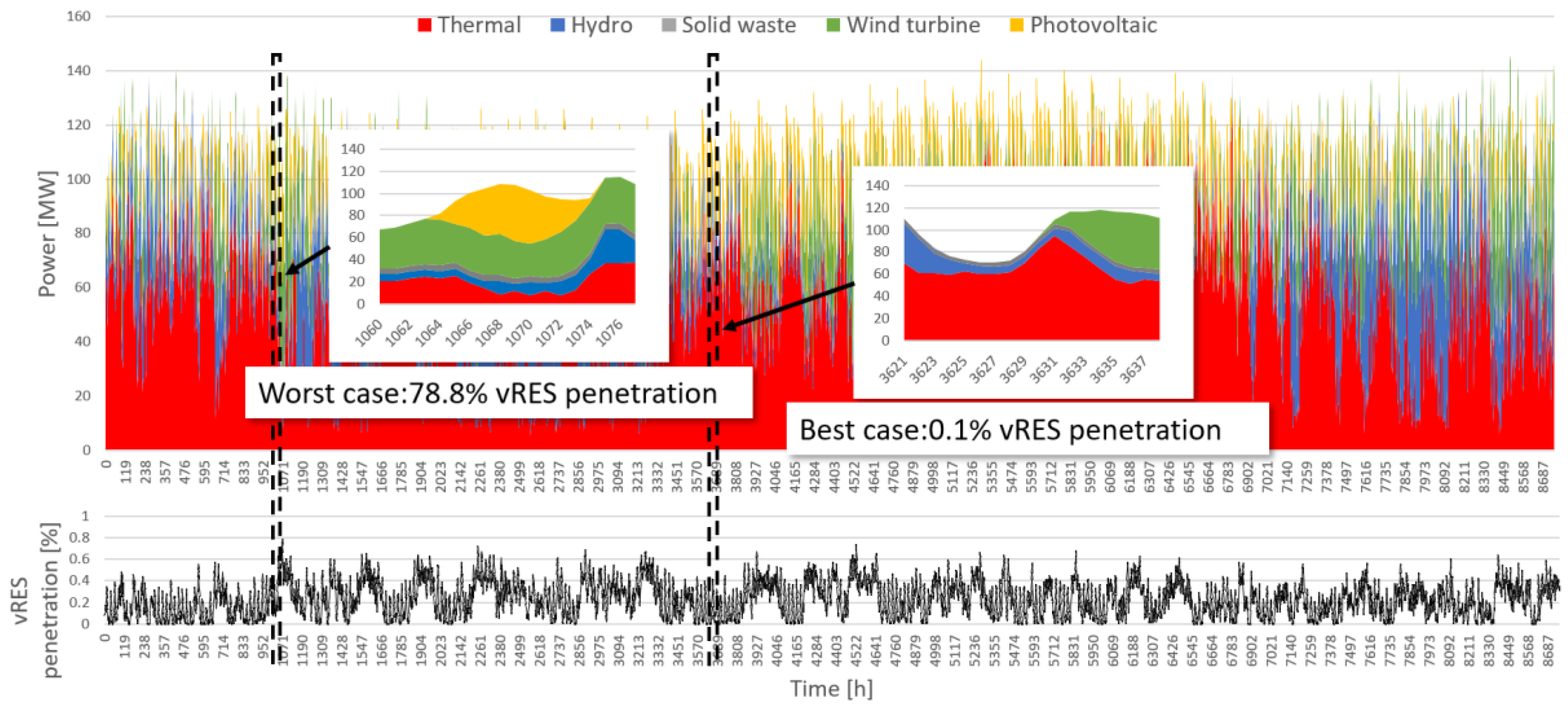
Figure 4 and
Figure 5 depict the resulting operation for the two scenarios and highlight the extreme points that form the basis for the transient simulations.
Table 3 and
Table 4 focus on the identified best and worst cases and present units of operation. The purpose of including this information is to clarify which units are active at that time and which units can offer ancillary services. All conventional generation units can offer inertia response to the power system, since they are all composed of SGs, which contain rotating masses. Accordingly, all conventional units except steam plants contribute to primary frequency control according to their droop curve (2% for thermal, 3% for hydro). An important point is that many hydro units (mainly those with smaller installed power) operate close to their rated power; therefore, although they can assist in primary frequency control, this capability is limited by their rated power.
Finally,
Table 5 presents the calculated available primary reserves and online inertia for each case under consideration. As shown, the reduction of primary frequency reserves and online inertia among worst cases (26.87 MW
e to 11.33 MW
e and 1.36 pu to 0.65 pu, respectively) is substantial and renders the system particularly sensitive under disturbances. It is mentioned that due to an increase in the installed hydropower plants’ capacity, the power system base is 250.17 MW
e and 289.95 MW
e for the reference and future cases, respectively.
7. Conclusions
The transition from a fossil-fuel-based power system to a sustainable system with very high instantaneous penetrations of vRES requires the development of efficient methods for matching supply and demand over multiple timescales. Since traditional power system operation and security are based on synchronous generator characteristics, it is of utmost importance to ensure that vRES power systems operate in such a way that does not endanger grid stability. This includes designing an inverter-based system to provide system stability and additional grid services necessary for proper system operations.
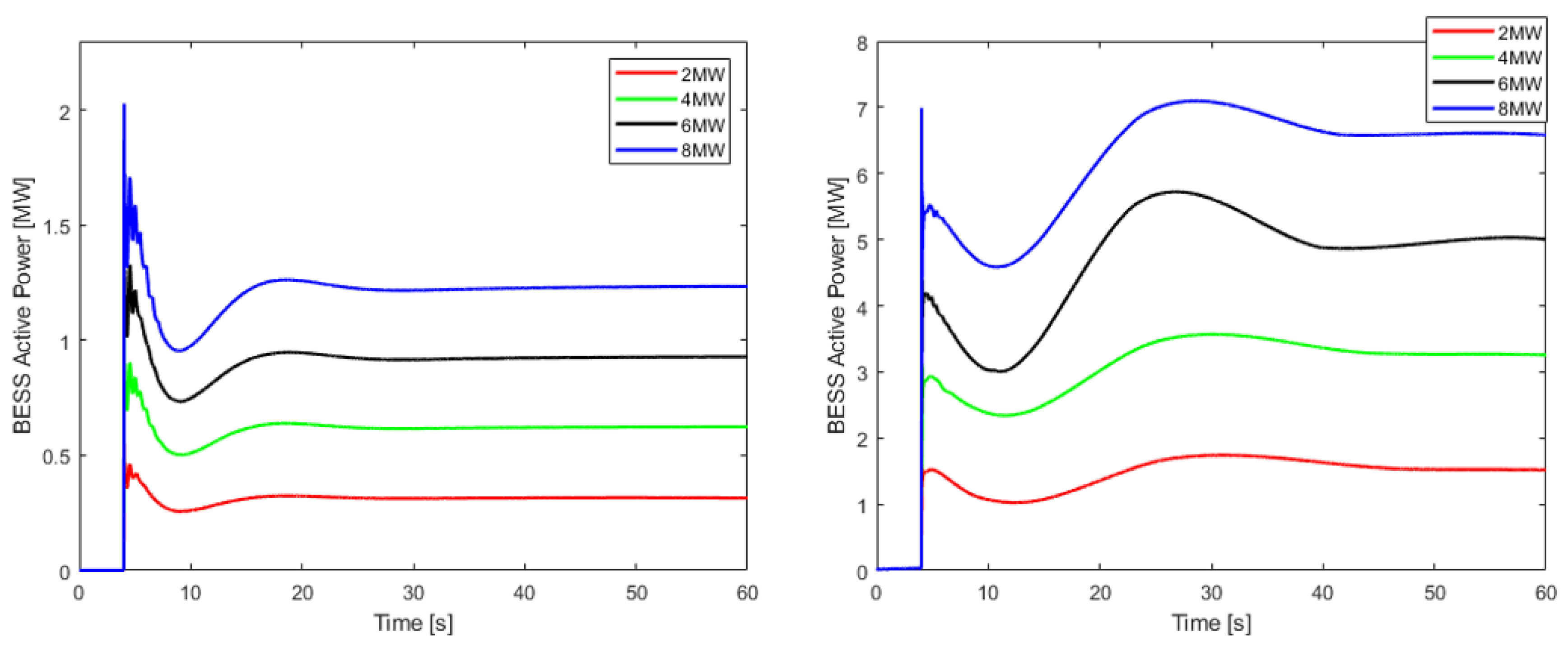
This paper focused on the primary frequency control of the Madeira island power system under high vRES penetration with the integration of a BESS (15 MWe, 10 MWhe) to provide frequency support under severe disturbances. In island systems, the location of a BESS is of minor importance, and in the context of the present study, the battery is considered to be installed in one of the major nodes of the system.
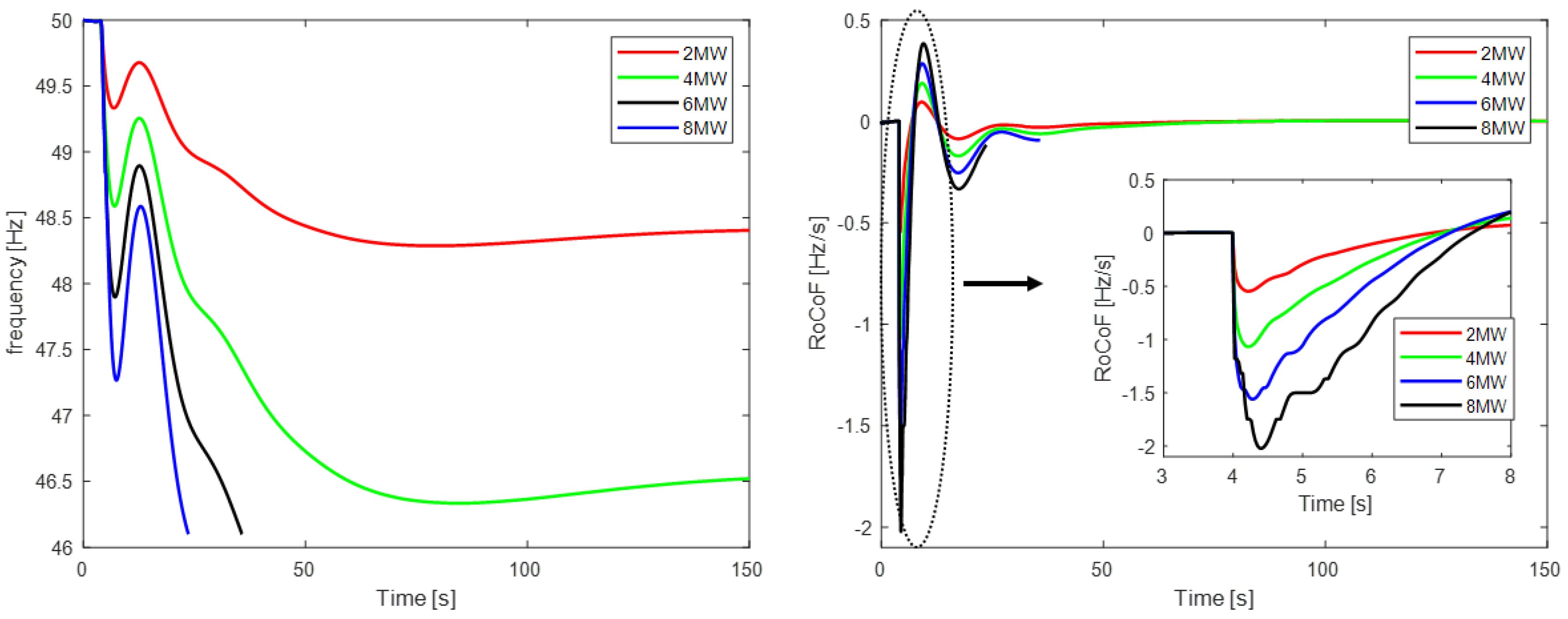
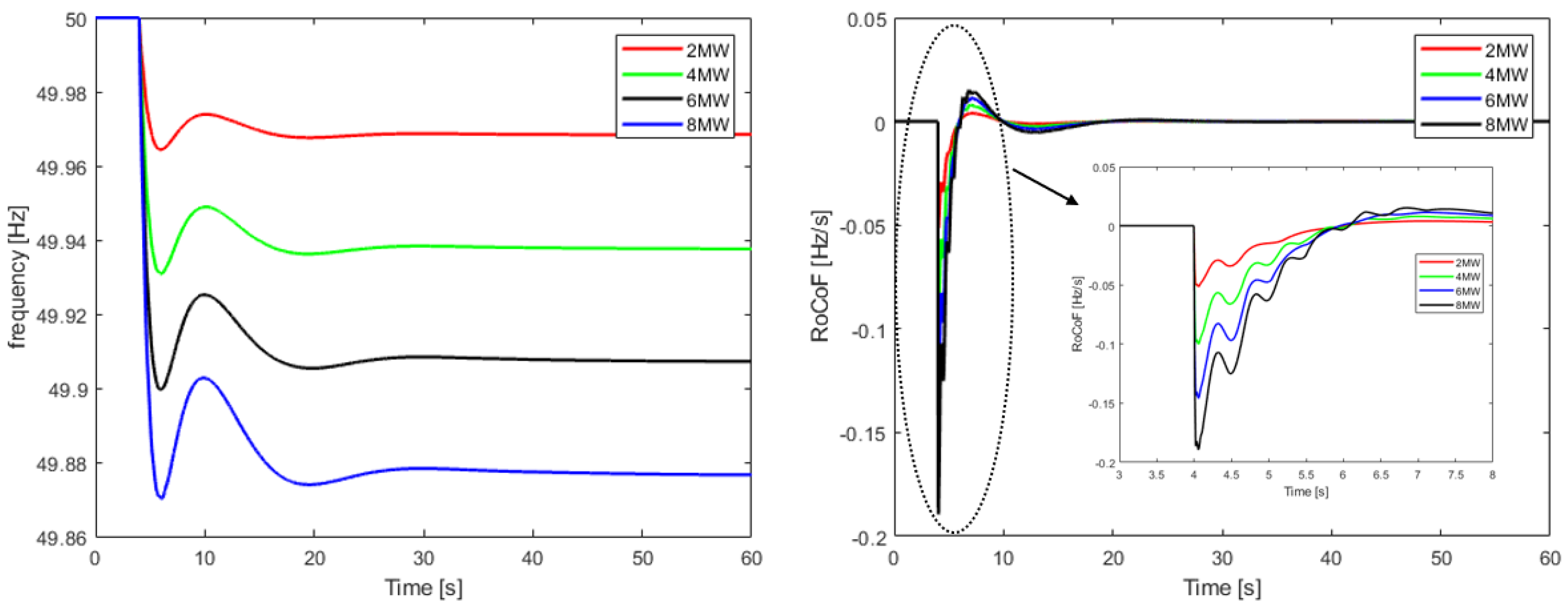
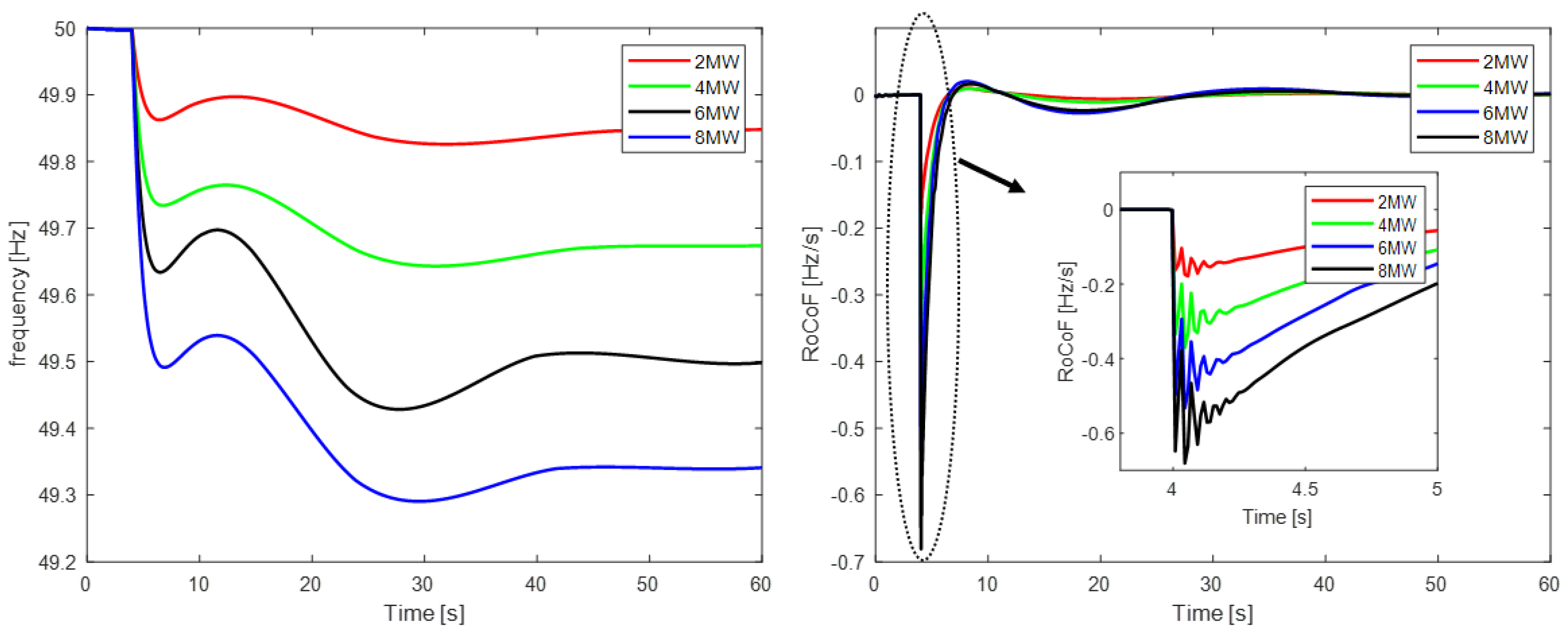
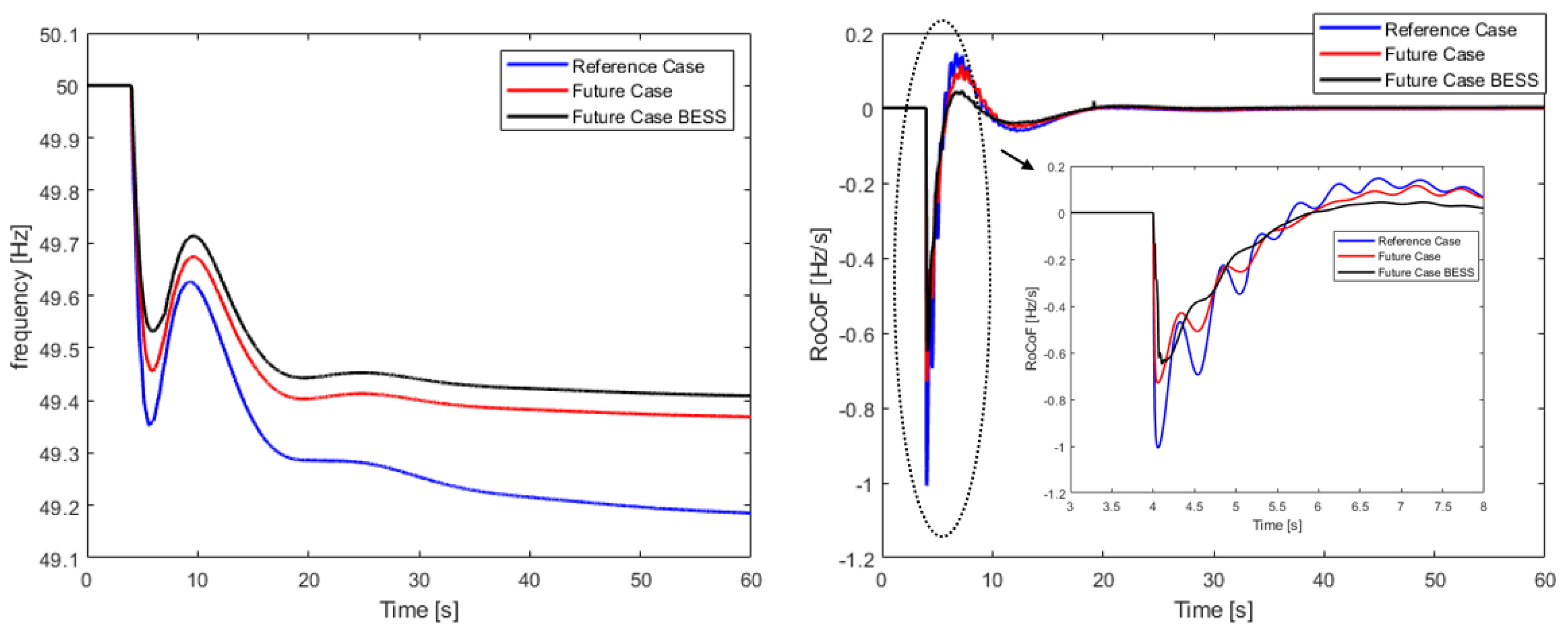
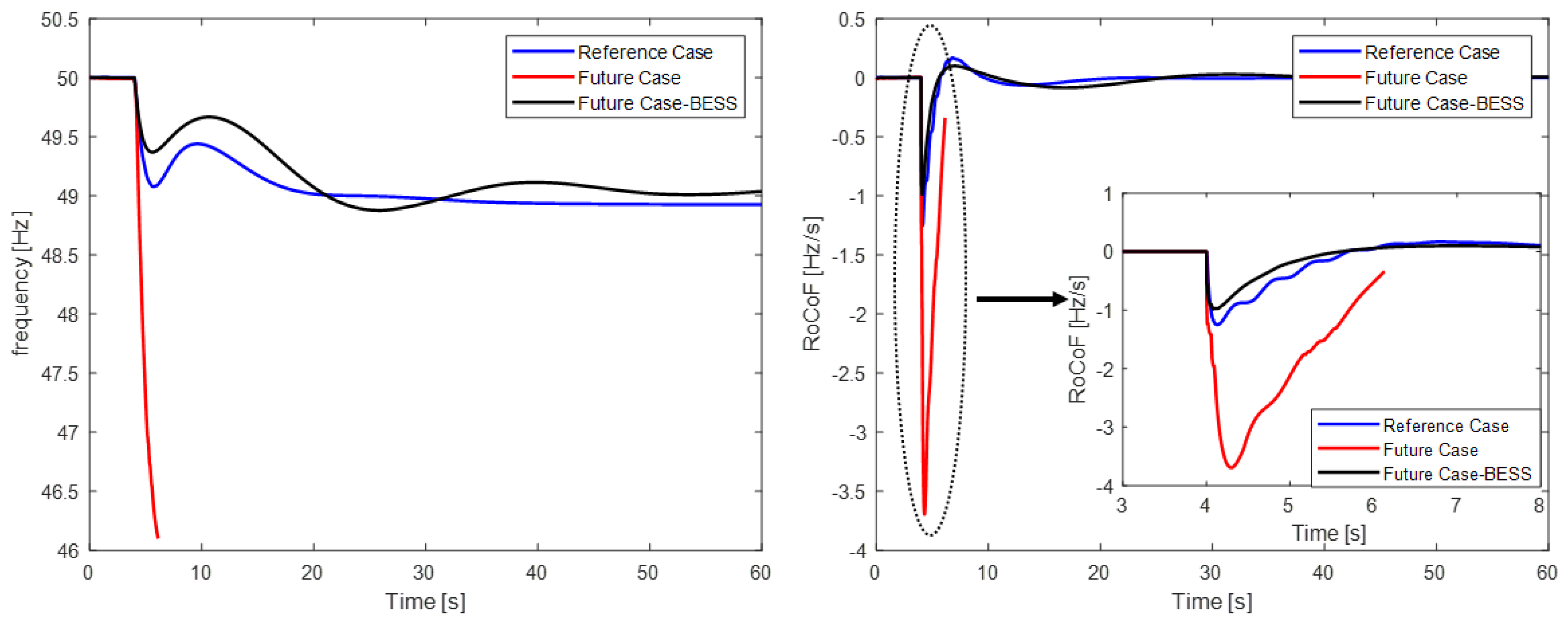
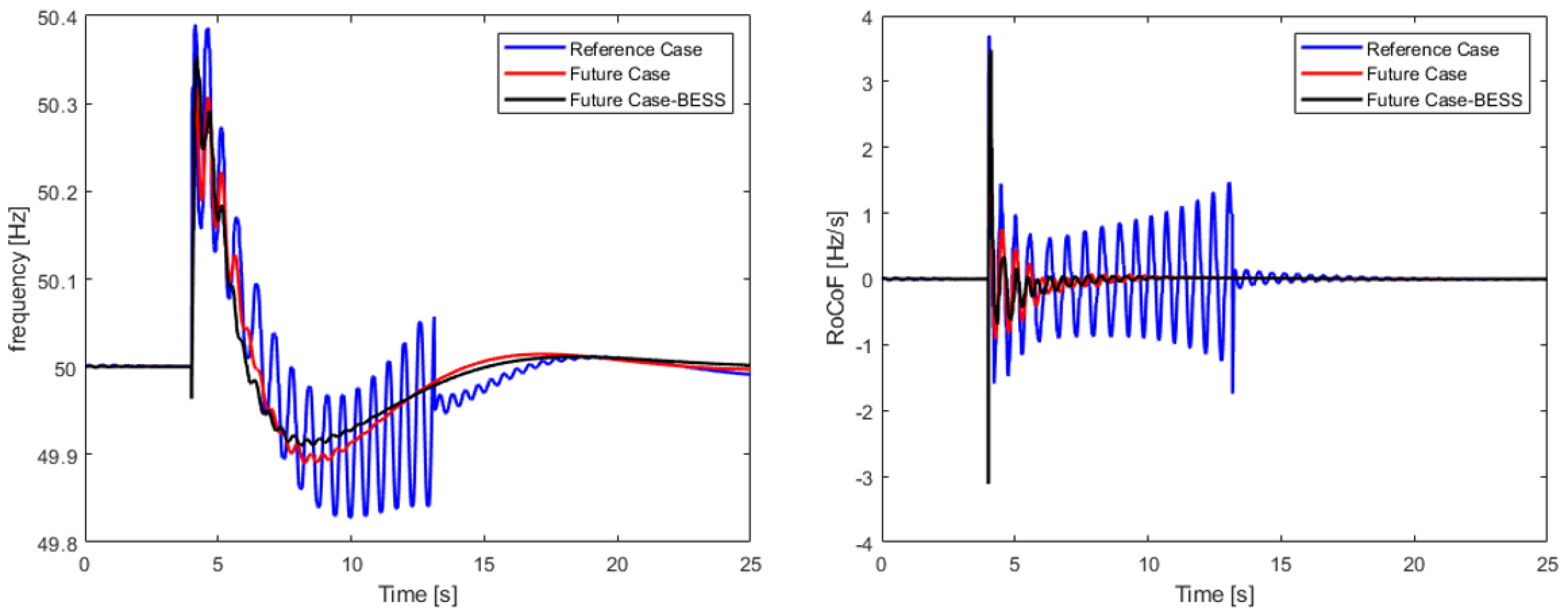
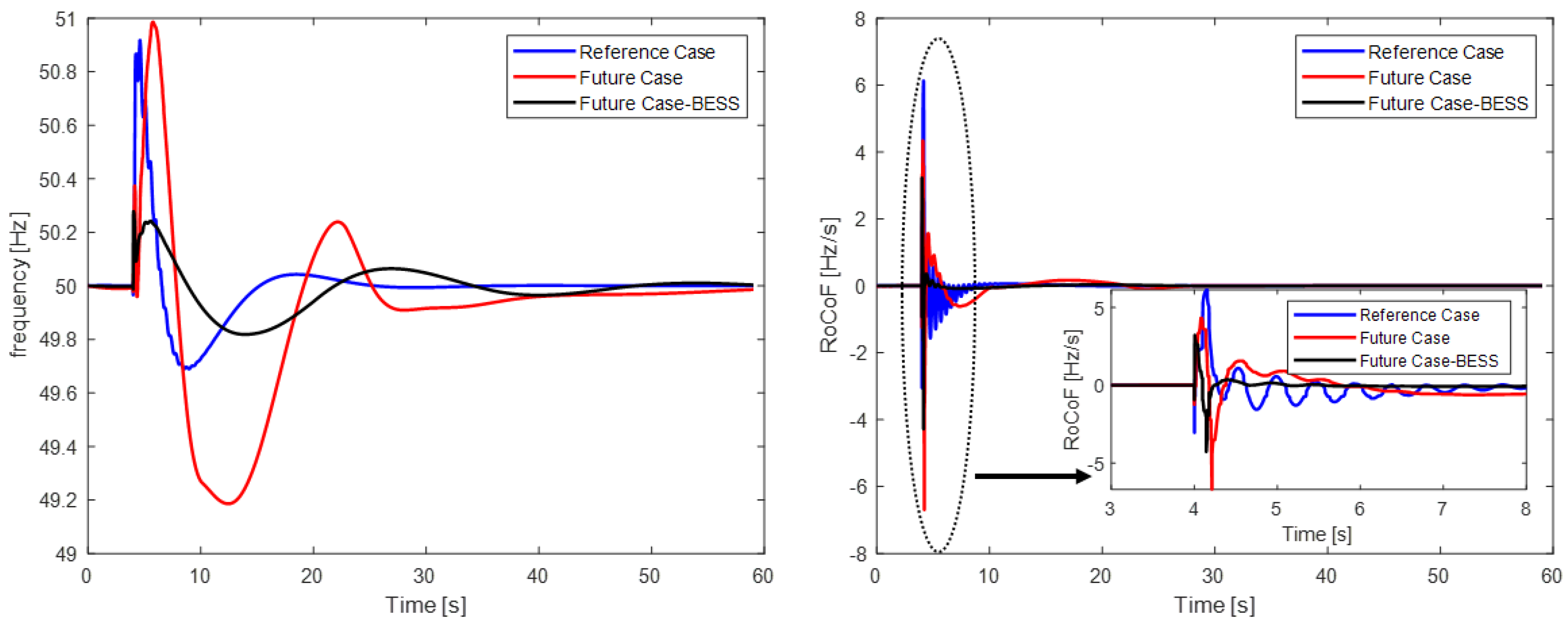
Through scenario-based fault simulation, the system’s response has been examined. It is demonstrated that with the proposed BESS, fault scenarios that would otherwise lead to load-shedding procedures can be mitigated with success. More precisely, three contingency events have been examined, i.e., load step-change, generation loss and short-circuit in a transmission line. For the most severe load step-change case of 8 MWe, in the future with BESS scenario, the resulting RoCoF oscillates in the interval [−0.18, −0.015] Hz/s and is constrained between [−0.3, −0.03] Hz/s for the reference scenario. Likewise, in the generation loss event, system collapse was prevented, while the RoCoF’s nadir between the future and future with BESS scenarios increased from −3.69 Hz/s to −1.5 Hz/s. Finally, the RoCoF of the future scenario oscillated between [−6.69, −4.32] Hz/s in the short-circuit event and [−4.27, −3.22] Hz/s in the same case of the future with BESS scenario.
It is also important to remark on some of the difficulties that occurred during the conduction of the present study. The most challenging part regards the high level of expertise required to develop the necessary modules and successfully perform the simulations using open-source software tools. There are many procedures that must be performed manually in contrast to the automated methods of corresponding proprietary tools. Modelica, in particular, requires deep user knowledge to develop and debug models in the power system domain. Additionally, there were conflicts about the compatibility of RMS simulations with high-RES scenarios and if the use of the phasor domain simulation, which is the most common for these studies, can predict all instabilities. Another important issue that is always present in these studies is the gathering and quality of the input data, which is often a sensitive subject, especially in the context of power consumption.
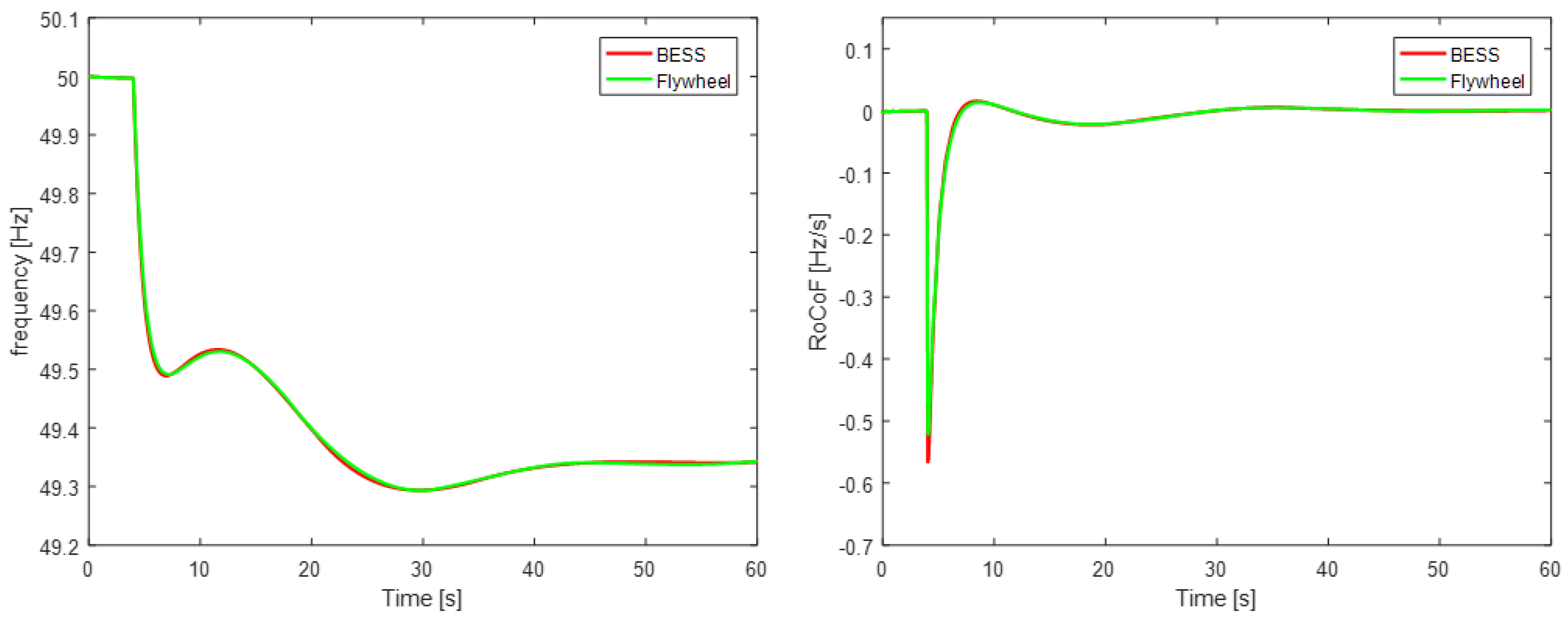
The simulation results proved that using a BESS for this purpose in an islanded non-interconnected island can prevent possible curtailment or load-shedding actions and is a promising solution for even higher RES penetration, ensuring grid security and stability. Similar conclusions were extracted from the analysis of using FESS for the frequency control of the island’s system, revealing that both batteries and flywheels are two energy storage technologies that guarantee the grid’s stability in a high-RES NII.

 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}