Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid




Abstract

1. Introduction
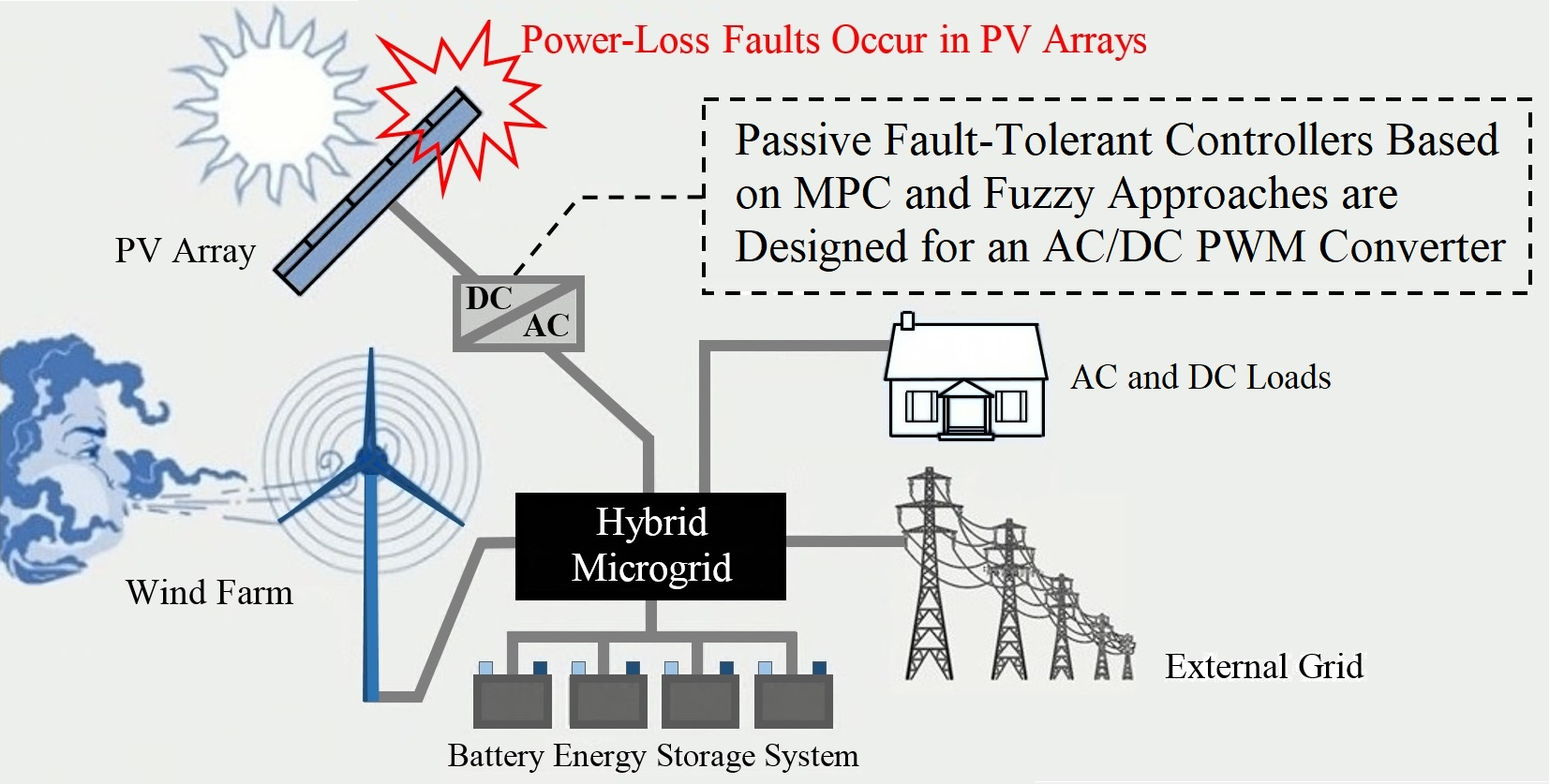
- A new design of hybrid microgrid benchmark with the integration of distributed renewable energy resources (wind farm and solar array) suitable for FTC investigations is considered in MATLAB/Simulink environment. This benchmark simulates the highly nonlinear dynamics of a hybrid AC/DC microgrid as well as the uncertainties and disturbances involved in different components.
- Severe power-loss faults due to open-circuit malfunctions at the string level in a PV array is modeled and investigated. Such faults can destabilize the operation of the entire microgrid which is indeed a low-inertia power grid in which any abrupt changes or severe faults in any location of the microgrid may have adverse impacts on other locations of the microgrid too.
- The applications of fuzzy logic and MPC techniques for designing PFTC schemes in order to tolerate and accommodate power-loss faults in a PV array at microgrid level are investigated. The results confirm that an appropriate FTC design for power electronic converters can effectively handle the fault effects and prevent their propagation throughout the microgrid.
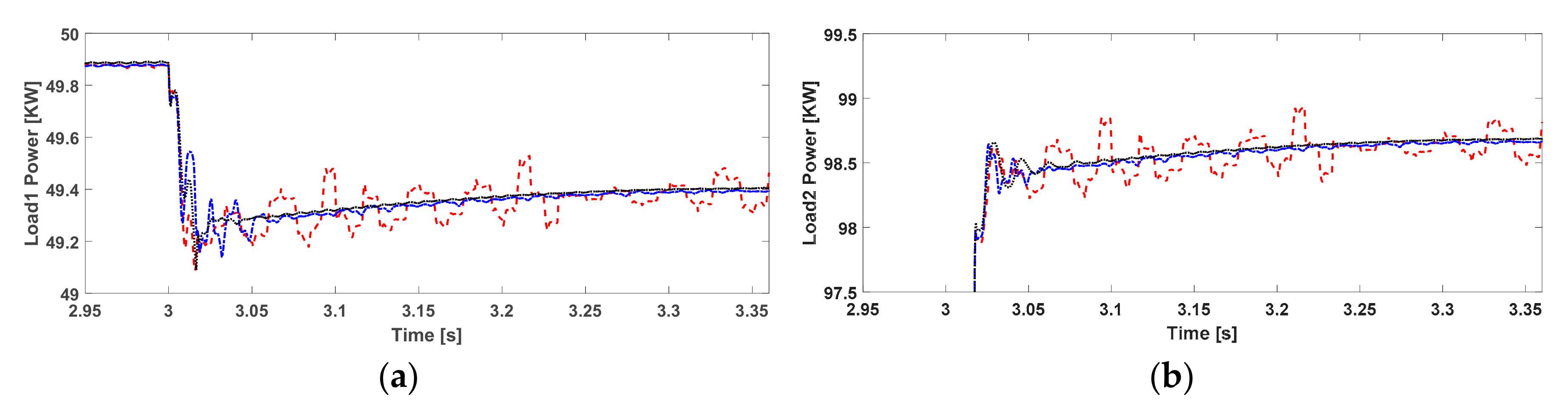
- Abrupt connection and disconnection of dynamic loads is another critical issue which is considered. Basically, if not effectively handled, dynamic loads can easily destabilize microgrids especially the low-voltage ones. This issue is even more challenging during the severe power-loss faults since the required balance between demanded and generated powers can be broken and the microgrid becomes unstable. Such disturbances due to variations in dynamic loads besides severe power-loss faults are simultaneously considered and investigated in this paper.
- During FTC control design procedure, the application of windowed Fourier analysis is investigated for the first time in order to achieve more suitable input signal for control.
- The rest of this paper is organized as follows: Section 2 presents the considered microgrid benchmark model. PV array system modeling and its failure modes with their effects on the microgrid are discussed in Section 3. Design of PFTC schemes for an AC/DC PWM converter is described in Section 4. The simulation results are discussed and demonstrated in Section 5, and finally, conclusions and future works are presented in Section 6.
2. Microgrid Benchmark
2.1. Wind Farm
2.2. Solar Farm
2.3. BESS
3. PV Array Modeling and Fault Analysis
3.1. PV Array Modeling
3.2. Power-Loss Faults in PV Arrays
4. Fault-Tolerant Control Design for AC/DC PWM Converter
4.1. PFTC Design using FGS
4.1.1. Windowed Fourier Analysis
4.1.2. FGS-PI Control
4.2. PFTC Design using MPC
4.2.1. Prediction Model
4.2.2. State Estimation and Output Prediction
| Algorithm 1. State estimation method used by MPC controller |
| 1: Inputs: : controller state estimation from previous time step , : actual manipulated variable used from to , : optimal manipulated variable that was recommended by MPC to be used from to , : current disturbances, : current measured plant output, : columns of corresponding to and , : rows of corresponding to plant output, : rows and columns of corresponding to , : constant Kalman gain matrices. 2: Outputs: , : controller state estimation at time step , : the MPC-recommended MV to be used between time steps and , : controller state prediction for the time step . 3: Variables: , : revised , : error used in the procedure. 4: if then 5: ; 6: else 7: ; 8: end if 9: ; 10: ; // Update the controller state estimate 11: ; // Solve the QP problem at time step 12: . |
| Algorithm 2. Output variable prediction method used by MPC controller |
| 1: Inputs: : prediction horizon, : controller state estimates, : current disturbances, : projected future disturbances in which , : natural numbers set, : constant matrices in the generalized model, where , and show columns of and matrices relates to and . 2: Output: : the predicted noise-free plant output at any step in which . 3: ; // From the generalized model 4: for each do 5: 6: end for 7: for each do 8: 9 end for |
4.2.3. Optimization Problem
5. Simulation Results
5.1. Fault-Free Operation
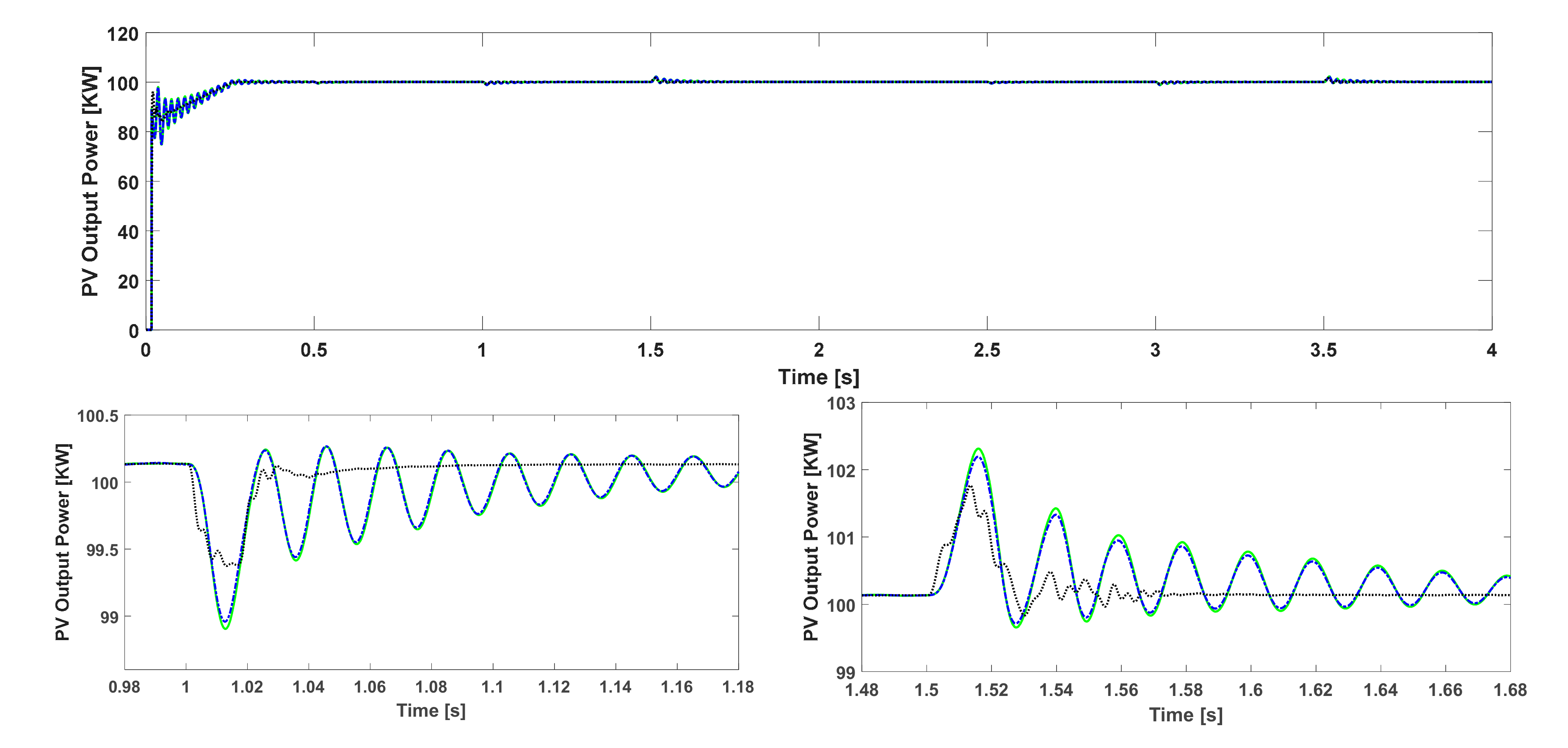
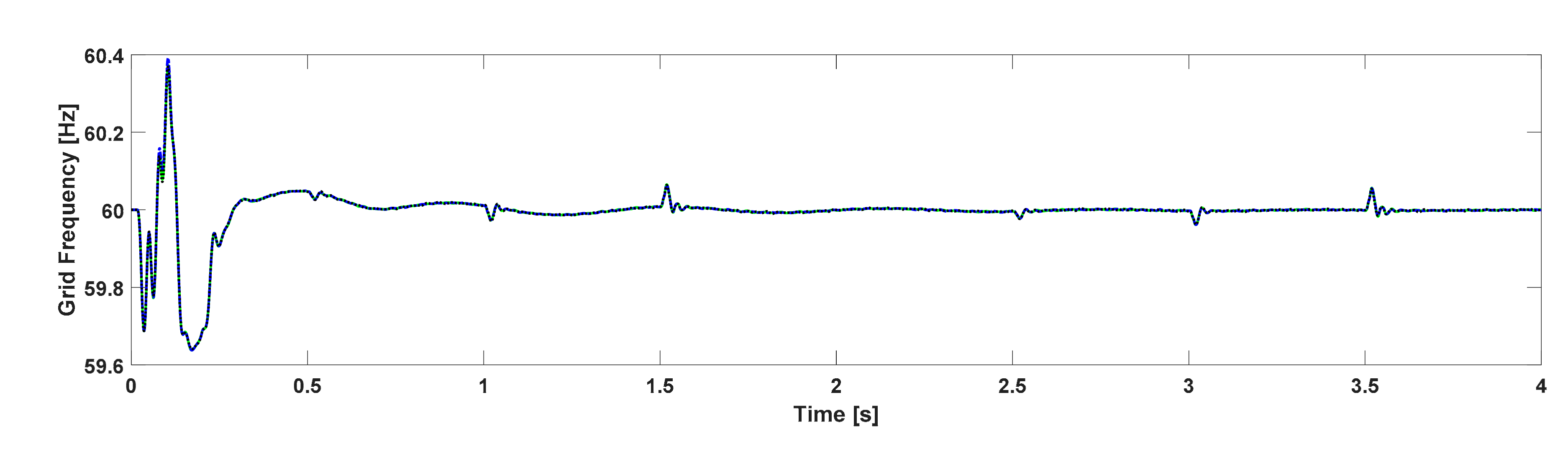
5.2. Faulty Operation under Fault Scenario 1 (65% Power Loss in PV Array)
5.3. Faulty Operation under Fault Scenario 2 (80% Power Loss in PV Array)
5.4. Identification and Validation of the MPC Model
6. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2010, 8, 18–28. [Google Scholar] [CrossRef]
- Lasseter, B. Microgrids distributed power generation. Power Eng. Soc. IEEE 2001, 1, 146–149. [Google Scholar] [CrossRef]
- Lasseter, R.; Akhil, A.; Marnay, C.; Stephens, J.; Dagle, J.; Guttromsom, R.; Meliopoulous, A.S.; Yinger, R.; Eto, J. Integration of Distributed Energy Resources—The CERTS Microgrid Concept; Lawrence Berkeley National Lab. (LBNL): Berkeley, CA, USA, 2002; Available online: http://bnrg.eecs.berkeley.edu/~randy/Courses/CS294.F09/MicroGrid.pdf (accessed on 21 September 2020).
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Villalón, A.; Rivera, M.; Salgueiro, Y.; Muñoz, J.; Dragičević, T.; Blaabjerg, F. Predictive control for microgrid applications: A review study. Energies 2020, 13, 2454. [Google Scholar] [CrossRef]
- Keyhani, A. Design of Smart Power Grid Renewable Energy Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Bae, S.; Kwasinski, A. Dynamic modeling and operation strategy for a microgrid with wind and photovoltaic resources. IEEE Trans. Smart Grid 2012, 3, 1867–1876. [Google Scholar] [CrossRef]
- Oudalov, A.; Fidigatti, A. Adaptive network protection in microgrids. Int. J. Distrib. Energy Resour. 2009, 5, 201–226. Available online: http://www.microgrids.eu/documents/519.pdf (accessed on 21 September 2020).
- Hosseinzadeh, M.; Rajaei Salmasi, F. Islanding Fault detection in microgrids—A survey. Energies 2020, 13, 3479. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. Fault diagnosis in microgrids with integration of solar photovoltaic systems: A review. In IFAC World Congress; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Badihi, H.; Jadidi, S.; Zhang, Y.M.; Su, C.Y.; Xie, W.F. AI-driven intelligent fault detection and diagnosis in a hybrid AC/DC microgrid. In Proceedings of the the 1st International Conference on Industrial Artificial Intelligence, Shenyang, China, 22–26 July 2019. [Google Scholar] [CrossRef]
- Gholami, S.; Saha, S.; Aldeen, M. Fault tolerant control of electronically coupled distributed energy resources in microgrid systems. Int. J. Electr. Power Energy Syst. 2018, 95, 327–340. [Google Scholar] [CrossRef]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. Passive fault-tolerant control of PWM converter in a hybrid AC/DC microgrid. In Proceedings of the IEEE 2nd International Conference on Renewable Energy and Power Engineering (REPE), Toronto, ON, Canada, 2–4 November 2019. [Google Scholar] [CrossRef]
- Prodan, I.; Zio, E.; Stoican, F. Fault tolerant predictive control design for reliable microgrid energy management under uncertainties. Energy 2015, 91, 20–34. [Google Scholar] [CrossRef]
- Morato, M.M.; Mendes, P.R.; Normey-Rico, J.E.; Bordons, C. LPV-MPC fault-tolerant energy management strategy for renewable microgrids. Int. J. Electr. Power Energy Syst. 2020, 117, 105644. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Fault-tolerant supervisory controller for a hybrid AC/DC micro-grid. IEEE Trans. Smart Grid 2018, 9, 2809–2823. [Google Scholar] [CrossRef]
- Lin, X.; Wang, Y.; Pedram, M.; Kim, J.; Chang, N. Designing fault-tolerant photovoltaic systems. IEEE Des. Test 2013, 31, 76–84. [Google Scholar] [CrossRef]
- Boutasseta, N.; Ramdani, M.; Mekhilef, S. Fault-tolerant power extraction strategy for photovoltaic energy systems. Sol. Energy 2018, 169, 594–606. [Google Scholar] [CrossRef]
- Kim, G.S.; Lee, K.B.; Lee, D.C.; Kim, J.M. Fault diagnosis and fault-tolerant control of DC-link voltage sensor for two-stage three-phase grid-connected PV inverters. J. Electr. Eng. Technol. 2013, 8, 752–759. [Google Scholar] [CrossRef][Green Version]
- Ribeiro, E.; Cardoso, A.J.; Boccaletti, C. Fault-tolerant strategy for a photovoltaic DC-DC converter. IEEE Trans. Power Electron. 2012, 28, 3008–3018. [Google Scholar] [CrossRef]
- Guilbert, D.; Gaillard, A.; N’Diaye, A.; Djerdir, A. Power switch failures tolerance and remedial strategies of a 4-leg floating interleaved DC/DC boost converter for photovoltaic/fuel cell applications. Renew. Energy 2016, 90, 14–27. [Google Scholar] [CrossRef]
- Li, Z.; Peng, T.; Zhang, P.F.; Han, H.; Yang, J. Fault diagnosis and fault-tolerant control of photovoltaic micro-inverter. J. Cent. South Univ. 2016, 23, 2284–2295. [Google Scholar] [CrossRef]
- Boudjellal, B.; Benslimane, T. Open-switch fault-tolerant control of power converters in a grid-connected photovoltaic system. Int. J. Power Electron. Drive Syst. 2016, 7, 1294–1308. [Google Scholar] [CrossRef]
- Guatam, V.; Illindala, M.S.; Sensarma, P. A fault tolerant controller for PV inverter in microgrid application. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Miller, N.W.; Sanchez-Gasca, J.; Price, W.; Delmerico, R.W. Dynamic modeling of GE 1.5 and 3.6 MW wind turbine-generators for stability simulations. IEEE Power Eng. Soc. Gen. Meet. 2003, 3, 1977–1983. [Google Scholar] [CrossRef]
- Blair, N.; Dobos, A.P.; Freeman, J.; Neises, T.; Wagner, M.; Ferguson, T.; Gilman, P.; Janzou, S. System Advisor Model, SAM 2014.1.14: General Description; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. Available online: https://www.nrel.gov/docs/fy14osti/61019.pdf (accessed on 21 September 2020).
- Poulek, V.; Dang, M.Q.; Libra, M.; Beránek, V.; Šafránková, J. PV Panel with Integrated Lithium Accumulators for BAPV Applications—One Year Thermal Evaluation. IEEE J. Photovolt. 2020, 10, 150–152. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A. Experimental validation of a battery dynamic model for EV applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Bouraiou, A.; Hamouda, M.; Chaker, A.; Sadok, M.; Mostefaoui, M.; Lachtar, S. Modeling and simulation of photovoltaic module and array based on one and two diode model using MATLAB/Simulink. Energy Procedia 2015, 74, 864–877. [Google Scholar] [CrossRef][Green Version]
- Zdiri, M.A.; Bouzidi, B.; Kahouli, O.; Abdallah, H. Fault detection method for boost converters in solar PV systems. In Proceedings of the The 19th IEEE International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019. [Google Scholar] [CrossRef]
- Sabbaghpur Arani, M.; Hejazi, M.A. The comprehensive study of electrical faults in PV arrays. J. Electr. Comput. Eng. 2016, 8712960. [Google Scholar] [CrossRef]
- Pei, T.; Hao, X. A fault detection method for photovoltaic systems based on voltage and current observation and evaluation. Energies 2019, 12, 1712. [Google Scholar] [CrossRef]
- Madeti, S.R.; Singh, S.N. A comprehensive study on different types of faults and detection techniques for solar photovoltaic system. Sol. Energy 2017, 158, 161–185. [Google Scholar] [CrossRef]
- Momeni, H.; Sadoogi, N.; Farrokhifar, M.; Gharibeh, H.F. Fault Diagnosis in Photovoltaic Arrays Using GBSSL Method and Proposing a Fault Correction System. IEEE Trans. Ind. Inform. 2020, 16, 5300–5308. [Google Scholar] [CrossRef]
- Hare, J.; Shi, X.; Gupta, S.; Bazzi, A. A review of faults and fault diagnosis in micro-grids electrical energy infrastructure. IEEE Energy Convers. Congr. Expo. 2014, 3325–3332. [Google Scholar] [CrossRef]
- Mellit, A.; Tina, G.M.; Kalogirou, S.A. Fault detection and diagnosis methods for photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 1–17. [Google Scholar] [CrossRef]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. A review on operation, control and protection of smart microgrids. In Proceedings of the IEEE 2nd International Conference on Renewable Energy and Power Engineering (REPE), Toronto, ON, Canada, 2–4 November 2019. [Google Scholar] [CrossRef]
- Zhao, Z.; Tomizuka, M.; Isaka, S. Fuzzy gain scheduling of PID controllers. IEEE Trans. Syst. ManCybern. 1993, 23, 1392–1398. [Google Scholar] [CrossRef]
- Bemporad, A.; Ricker, N.; Owen, J.G. Model predictive control—New tools for design and evaluation. Am. Control Conf. 2004, 6, 5622–5627. [Google Scholar] [CrossRef]
- Bemporad, A.; Ricker, N.; Morari, M. Model Predictive Control Toolbox for MATLAB: User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2014; Available online: http://fumblog.um.ac.ir/gallery/839/mpc_ug.pdf (accessed on 26 October 2020).
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Overschee, P.V.; Moor, B.D. Subspace Identification for Linear Systems: Theory, Implementation, Applications; Springer: Boston, MA, USA, 1996; ISBN 978-1-4613-8061-0. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | SunPower |
| Model number | SPR-415E-WHT-D |
| Module type | Monocrystalline |
| Cells per module | 128 |
| Maximum power | 414.801 |
| Open circuit voltage | 85.3 |
| Short circuit current | 6.0978 |
| Voltage at maximum power point | 72.9 |
| Current at maximum power point | 5.69 |
| Temperature coefficient of | −0.229 |
| Temperature coefficient of | 0.030706 |
| ZO | S | SP | M | MP | B | BP | ||
|---|---|---|---|---|---|---|---|---|
| ZO | ZO/ZO | ZO/ZO | ZO/ZO | ZO/ZO | ZO/ZO | ZO/ZO | ZO/ZO | |
| S | S/ZO | S/ZO | S/ZO | SP/S | SP/S | SP/S | SP/S | |
| SP | SP/SP | SP/SP | M/M | M/M | MP/M | MP/MP | MP/MP | |
| M | M/SP | M/M | MP/M | MP/MP | MP/MP | B/MP | B/MP | |
| MP | MP/MP | MP/MP | MP/MP | B/MP | B/B | B/B | B/B | |
| B | B/B | B/B | B/B | B/B | BP/BP | BP/BP | BP/BP | |
| BP | BP/BP | BP/BP | BP/BP | BP/BP | BP/BP | BP/BP | BP/BP | |
| High-DC Voltage | Transformer Secondary Current | |||
|---|---|---|---|---|
| Mean | STD | Mean | STD | |
| Baseline PI Control | 460.1123 | 5.7112 | −5.5873 | 476.4369 |
| PFTC using FGS | 460.1114 | 5.665 | −5.4916 | 476.4261 |
| PFTC using MPC | 460.0165 | 4.7919 | −0.464 | 475.4873 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jadidi, S.; Badihi, H.; Zhang, Y. Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid. Energies 2020, 13, 5625. https://doi.org/10.3390/en13215625
Jadidi S, Badihi H, Zhang Y. Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid. Energies. 2020; 13(21):5625. https://doi.org/10.3390/en13215625
Chicago/Turabian StyleJadidi, Saeedreza, Hamed Badihi, and Youmin Zhang. 2020. "Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid" Energies 13, no. 21: 5625. https://doi.org/10.3390/en13215625
APA StyleJadidi, S., Badihi, H., & Zhang, Y. (2020). Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid. Energies, 13(21), 5625. https://doi.org/10.3390/en13215625