Longitudinal Actuated Abdomen Control for Energy Efficient Flight of Insects

 , , and
, , and 
Abstract

1. Introduction
2. System Model
2.1. Reference Frames
2.2. Equations of Motion
2.2.1. Kinematics
2.2.2. Dynamics
- Earth is flat and non-rotating and is the inertial frame.
- The aircraft is electrically powered, has a constant total mass but varying mass distribution.
- The mass and mass distribution of the rigid body remains the same throughout the flight.
Model 1 Aircraft Dynamics
Model 2 Aircraft Dynamics
2.3. Forces and Moments
2.4. Control Inputs
2.5. Energy Maneuverability
3. Aircraft Model Specifications
3.1. Physical Properties
3.2. Aerodynamic Model
3.3. Control Inputs
4. Analysis and Results
4.1. Longitudinal Trim for Steady State Flight
4.2. Correction of Imbalance in Cruise Flight
4.2.1. Model 1
4.2.2. Model 2
4.3. Pull up Maneuver
4.3.1. Model 1
4.3.2. Model 2
5. Discussion
5.1. Correction of Imbalance in Steady Level Flight
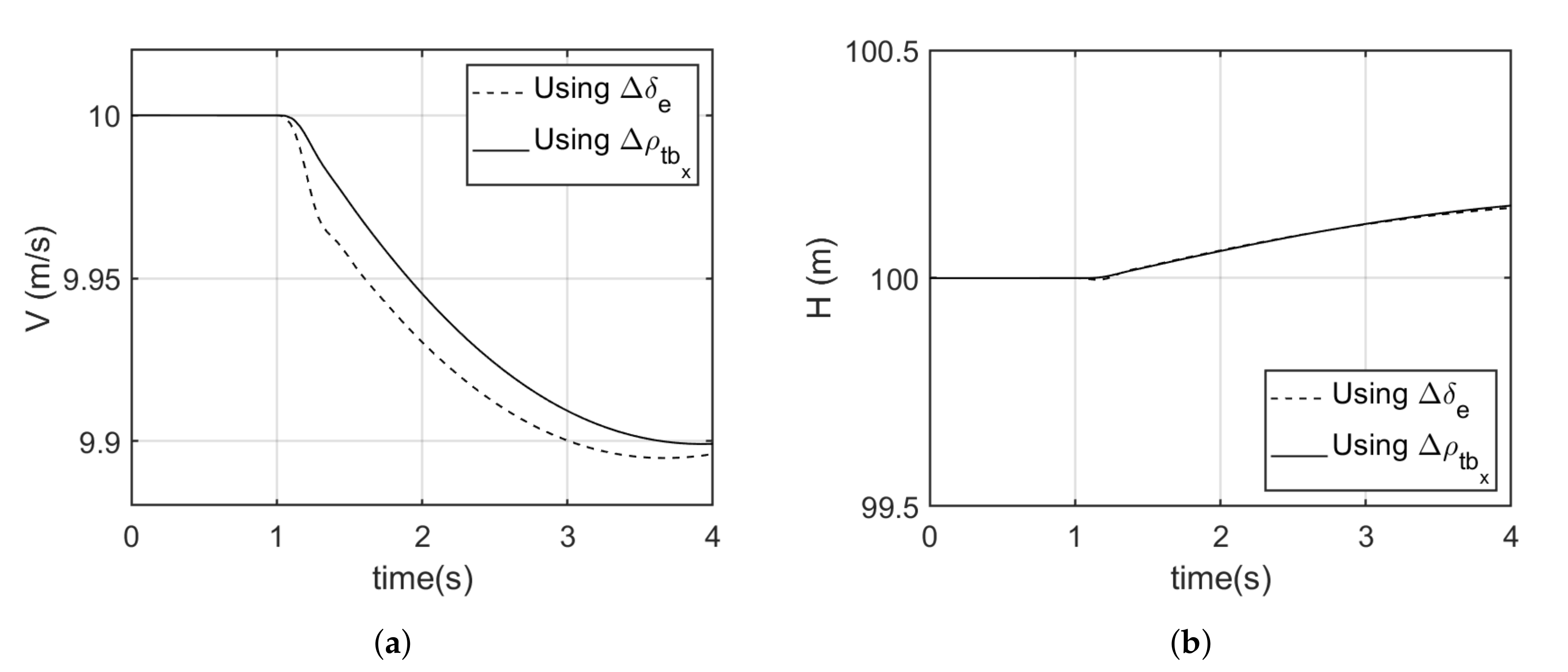
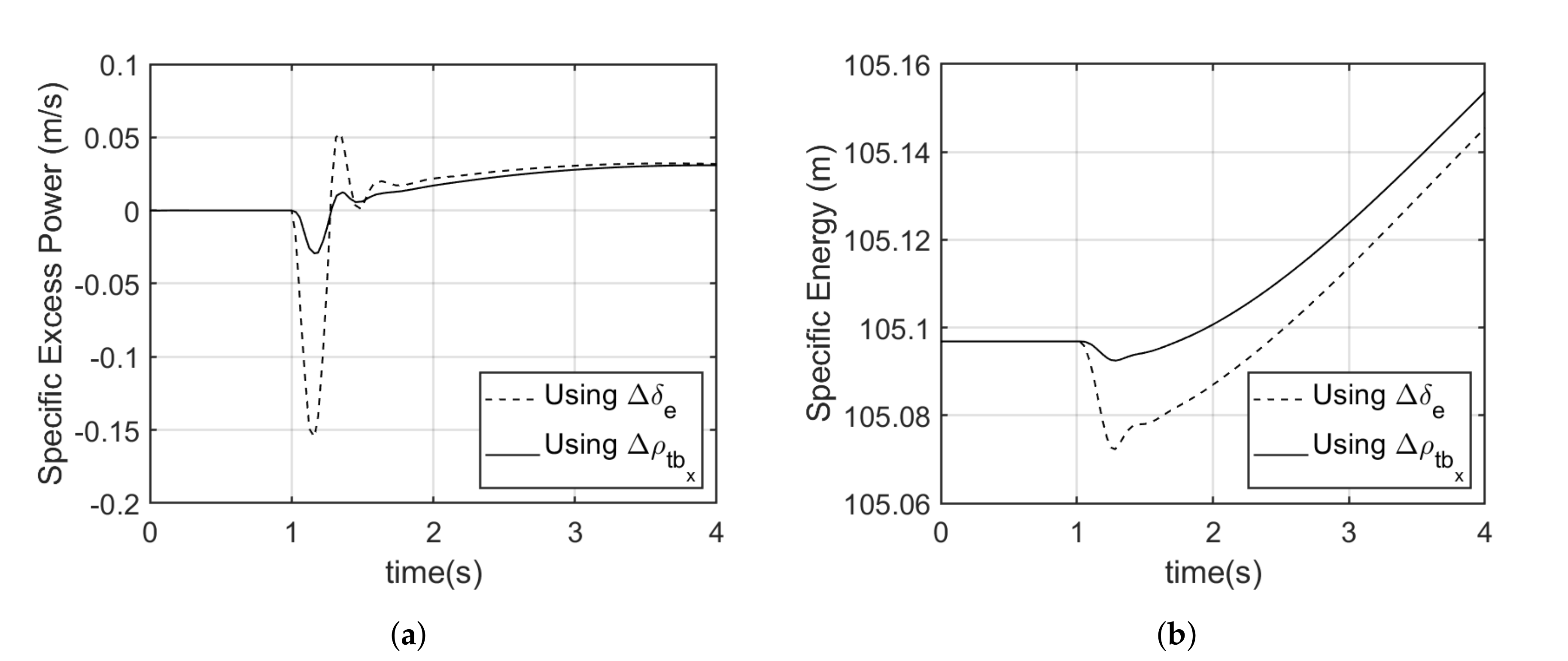
5.2. Pull up Maneuver
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Position of point a relative to point b | |
| Velocity of the centre of mass of a rigid body relative to reference frame B | |
| Angular velocity of frame A relative to frame B | |
| Mass of rigid body | |
| Rigid body | |
| Inertia tensor of rigid body about its centre of mass at point a | |
| (X (model, vector or tensor) expressed in reference frame A | |
| The rotation matrix from reference frame A to B | |
| Transpose of rotation matrix | |
| Skew symmetric matrix associated with vector A | |
| Subscript depicts initial/nominal value | |
| Represents a change from nominal value |
References
- Dyhr, J.P.; Cowan, N.J.; Colmenares, D.J.; Morgansen, K.A.; Daniel, T.L. Autostabilizing airframe articulation: Animal inspired air vehicle control. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Hawaii, HI, USA, 10–13 December 2012; pp. 3715–3720. [Google Scholar]
- Kohut, N.J. Inertial and Aerodynamic Tail Steering of a Meso-scale Legged Robot; University of California: Berkeley, CA, USA, 2013. [Google Scholar]
- Patel, A. Understanding the Motions of the Cheetah Tail Using Robotics. Ph.D. Thesis, University of Cape Town, Cape Town, South Africa, 2015. [Google Scholar]
- Camhi, J.M. Yaw-correcting postural changes in locusts. J. Exp. Biol. 1970, 52, 519–531. [Google Scholar]
- Camhi, J.M. Sensory control of abdomen posture in flying locusts. J. Exp. Biol. 1970, 52, 533–537. [Google Scholar]
- Götz, K.G.; Hengstenberg, B.; Biesinger, R. Optomotor control of wing beat and body posture in Drosophila. Biol. Cybern. 1979, 35, 101–112. [Google Scholar] [CrossRef]
- Zanker, J.M. How does lateral abdomen deflection contribute to flight control of Drosophila melanogaster? J. Comp. Physiol. A 1988, 162, 581–588. [Google Scholar] [CrossRef]
- Zanker, J. On the mechanism of speed and altitude control in Drosophila melanogaster. Physiol. Entomol. 1988, 13, 351–361. [Google Scholar] [CrossRef]
- Luu, T.; Cheung, A.; Ball, D.; Srinivasan, M.V. Honeybee flight: A novel ‘streamlining’response. J. Exp. Biol. 2011, 214, 2215–2225. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Hinterwirth, A.J.; Daniel, T.L. Antennae in the hawkmoth Manduca sexta (Lepidoptera, Sphingidae) mediate abdominal flexion in response to mechanical stimuli. J. Comp. Physiol. 2010, 196, 947–956. [Google Scholar] [CrossRef] [PubMed]
- Rüppell, G.; Hilfert-Rüppell, D.; Schneider, B.; Dedenbach, H. On the firing line–interactions between hunting frogs and Odonata. Int. J. Odonatol. 2020, 23, 199–217. [Google Scholar] [CrossRef]
- Du, C.; Xu, J.; Zheng, Y. Modeling and control of a dragonfly-like micro aerial vehicle. Adv Robot. Autom. S 2015, 2, 2. [Google Scholar]
- Dyhr, J.P.; Morgansen, K.A.; Daniel, T.L.; Cowan, N.J. Flexible strategies for flight control: An active role for the abdomen. J. Exp. Biol. 2013, 216, 1523–1536. [Google Scholar] [CrossRef]
- Anderson, J. Aircraft Performance and Design; McGraw-Hill International Editions: Aerospace Science/ Technology Series; WCB/McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Koerhuis, C.; Hof, A.; van der Heide, F. Energy consumption in static muscle contraction. Eur. J. Appl. Physiol. 2003, 88, 588–592. [Google Scholar] [CrossRef] [PubMed]
- Chahl, J.; Dorrington, G.; Premachandran, S.; Mizutani, A. The dragonfly flight envelope and its application to micro uav research and development. IFAC Proc. Vol. 2013, 46, 231–234. [Google Scholar] [CrossRef]
- Marden, J.H. Maximum lift production during takeoff in flying animals. J. Exp. Biol. 1987, 130, 235–258. [Google Scholar]
- Olberg, R.M. Visual control of prey-capture flight in dragonflies. Curr. Opin. Neurobiol. 2012, 22, 267–271. [Google Scholar] [CrossRef]
- Olberg, R.; Worthington, A.; Venator, K. Prey pursuit and interception in dragonflies. J. Comp. Physiol. A 2000, 186, 155–162. [Google Scholar] [CrossRef]
- Combes, S.; Rundle, D.; Iwasaki, J.; Crall, J.D. Linking biomechanics and ecology through predator–prey interactions: Flight performance of dragonflies and their prey. J. Exp. Biol. 2012, 215, 903–913. [Google Scholar] [CrossRef]
- Wakeling, J.; Ellington, C.P. Dragonfly flight. I. Gliding flight and steady-state aerodynamic forces. J. Exp. Biol. 1997, 200, 543–556. [Google Scholar] [PubMed]
- Azuma, A.; Watanabe, T. Flight performance of a dragonfly. J. Exp. Biol. 1988, 137, 221–252. [Google Scholar]
- Newman, B. Model test on a wing section of a dragonfly. Scale Eff. Anim. Locomot. 1977, 445–477. [Google Scholar]
- May, M.L. A critical overview of progress in studies of migration of dragonflies (Odonata: Anisoptera), with emphasis on North America. J. Insect Conserv. 2013, 17, 1–15. [Google Scholar] [CrossRef]
- Scorer, R. The nature of convection as revealed by soaring birds and dragonflies. Q. J. R. Meteorol. Soc. 1954, 80, 68–77. [Google Scholar] [CrossRef]
- Heinrich, B.; Casey, T.M. Heat transfer in dragonflies:‘Fliers’ and ‘perchers’. J. Exp. Biol. 1978, 74, 17–36. [Google Scholar]
- Mitchell, F.L.; Lasswell, J.L. Digital Dragonflies. Am. Entomol. 2000, 46, 110–115. [Google Scholar] [CrossRef]
- Silsby, J. Dragonflies of the World; CSIRO Publishing: Melbourne, Australia, 2001. [Google Scholar]
- Nelson, R.C. Flight Stability and Automatic Control; WCB/McGraw Hill: New York, NY, USA, 1998; Volume 2. [Google Scholar]
- Cook, M.V. Flight Dynamics Principles: A Linear Systems Approach to Aircraft Stability and Control; Butterworth-Heinemann: Cambridge, UK, 2012. [Google Scholar]
- May, M.L. Thermoregulation and adaptation to temperature in dragonflies (Odonata: Anisoptera). Ecol. Monogr. 1976, 46, 1–32. [Google Scholar] [CrossRef]
- May, M. Dependence of flight behavior and heat production on air temperature in the green darner dragonfly Anax junius (Odonata: Aeshnidae). J. Exp. Biol. 1995, 198, 2385–2392. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Erturk, S.A. Performance Analysis, Dynamic Simulation and Control of Mass-Actuated Airplane. Ph.D. Thesis, University of Texas at Arlington, Arlington, TX, USA, 2016. [Google Scholar]
- Waishek, J.; Dogan, A.; Blake, W. Derivation of the dynamics equations of receiver aircraft in aerial refueling. J. Guid. Control. Dyn. 2009, 32, 586–598. [Google Scholar] [CrossRef]
- Sakhaei, A. Dynamic Modelling And Predictive Control For Insect-Like Flapping Wing Aerial Micro Robots. Ph.D. Thesis, Ryerson University, Toronto, ON, USA, 2010. [Google Scholar]
- Zipfel, P.H. Modeling and Simulation of Aerospace Vehicle Dynamics; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2007. [Google Scholar]
- Nel, A.; Prokop, J.; Pecharová, M.; Engel, M.S.; Garrouste, R. Palaeozoic giant dragonflies were hawker predators. Sci. Rep. 2018, 8, 12141. [Google Scholar] [CrossRef] [PubMed]
- Mohammad, H.S. Aircraft Design: A Systems Engineering Approach; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Shaw, R.L. Fighter Combat. In Tactics and Maneuvering; Naval Institute Press: Annapolis, MD, USA, 1985. [Google Scholar]
- Lambregts, A. Automatic flight control: Concepts and methods. J. FAA Natl. Resour. Spec. Adv. Control. 1995, 2001–2003. [Google Scholar]
- Balmer, G.R. Modelling and Control of a Fixed-wing UAV for Landings on Mobile Landing Platforms. Master’s Thesis, Royal Institute of Technology, Stockholm, Sweden, 2015. [Google Scholar]
- MATLAB. 9.7.0.1190202 (R2019b); The MathWorks Inc.: Natick, MA, USA, 2019. [Google Scholar]
- Okamoto, M.; Yasuda, K.; Azuma, A. Aerodynamic characteristics of the wings and body of a dragonfly. J. Exp. Biol. 1996, 199, 281–294. [Google Scholar]
- Chitsaz, N.; Marian, R.; Chahl, J. Experimental method for 3D reconstruction of Odonata wings (methodology and dataset). PloS ONE 2020, 15, e0232193. [Google Scholar] [CrossRef]
- Drela, M.; Youngren, H. AVL Overview. 2014. Available online: http://web.mit.edu/drela/Public/web/avl/ (accessed on 12 June 2020).
- Drela, M.; Youngren, H. XFOIL Manual. 2001. Available online: http://web.mit.edu/aeroutil_v1.0/xfoil_doc.txt (accessed on 10 June 2020).
- Deperrois, A. XFLR5 Analysis of Foils and Wings Operating at Low Reynolds Numbers. 2009. Available online: https://engineering.purdue.edu/~aerodyn/AAE333/FALL10/HOMEWORKS/HW13/XFLR5_v6.01_Beta_Win32%282%29/Release/Guidelines.pdf (accessed on 10 June 2020).
- Budziak, K. Aerodynamic Analysis with Athena Vortex Lattice (AVL); Aircraft Design and Systems Group (AERO), Department of Automotive: Hamburg, Germany, 2015. [Google Scholar]
- Tsagarakis, M. Project Solaris-Analysis of Airfoil for Solar Powered Flying Wing UAV. Master’s Thesis, Mälardalen University, Västerås, Sweden, 2011. [Google Scholar]
- Airfoil Database for Tailless and Flying Wings. Available online: https://www.aerodesign.de/english/profile/profile_s.htm (accessed on 6 April 2020).
- Wick, P. Peter Wick on Planks. Part 3: The good slope plank. Radio Control. Soar. Dig. 2006, 23, 7–11. [Google Scholar]
- Song, L.; Yang, H.; Zhang, Y.; Zhang, H.; Huang, J. Dihedral influence on lateral–directional dynamic stability on large aspect ratio tailless flying wing aircraft. Chin. J. Aeronaut. 2014, 27, 1149–1155. [Google Scholar] [CrossRef]
- Loth, J. Engineering Approach to Aerodynamics and Aircraft Performance; McGraw Hill: New York, NY, USA, 2007. [Google Scholar]
- Drela, M.; Youngren, H. AVL 3.36 User Primer. 2017. Available online: http://web.mit.edu/drela/Public/web/avl/avl_doc.txt (accessed on 10 June 2020).
- Abzug, M.J.; Larrabee, E.E. Airplane Stability and Control: A History of the Technologies that Made Aviation Possible; Cambridge University Press: Cambridge, UK, 2005; Volume 14. [Google Scholar]
- Borri, M.; Trainelli, L. Basic airplane equilibrium and stability revisited. In Proceedings of the International Conference on Aeronautical Science and Air Transportation (ICASAT) Tripoli, Tripoli, Libya, 23–25 April 2007; Volume 23, p. 25. [Google Scholar]
- Dantsker, O.D.; Theile, M.; Caccamo, M. A High-Fidelity, Low-Order Propulsion Power Model for Fixed-Wing Electric Unmanned Aircraft. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 12–14 July 2018; pp. 1–16. [Google Scholar]
- Ly, J.K. Angle of Attack Determination Using Inertial Navigation System Data from Flight Tests. Ph.D. Thesis, University of Tennessee, Knoxville, TX, USA, 2017. [Google Scholar]
- Bomphrey, R.J.; Nakata, T.; Henningsson, P.; Lin, H.T. Flight of the dragonflies and damselflies. Philos. Trans. R. Soc. Biol. Sci. 2016, 371, 20150389. [Google Scholar] [CrossRef] [PubMed]
- Kilkenny, E. Full Scale Wind Tunnel Tests on Hang Glider Pilots; College of Aeronautics Report 8416; Cranfield Institute of Technology: Bedford, UK, 1984. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (kg) | 0.325 | (kg) | 0.06 |
| Body length, (m) | 0.3 | Max. tail length, (m) | 0.4 |
| Max. body diameter, (m) | 0.14 | Tail diameter, (m) | 0.05 |
| (kgm) | 0.00187 | (m) | 1.4 |
| (kgm) | 0.01117 | (m) | 0.19434 |
| (kgm) | 0.00934 | S (m) | 0.26865 |
| (m) | [−0.064; 0; 0.003] | (m) | [0.025; 0; 0] |
| Limitations | Unit |
|---|---|
| deg | |
| deg | |
| m |
| Model Type | (m/s) | (m) | (m) | (N) | |||
|---|---|---|---|---|---|---|---|
| Model 1 | 10 | 100 | 0.564 | - | −0.252 | −1.79 | 0.825 |
| Model 2 | 0 | −0.252 | −1.79 | 0.825 |
| Parameter | Value |
|---|---|
| (kg) | 0.04 |
| (m) | −0.05 |
| (m) | [−0.062;0;0.003] |
| (kgm) | 0.00934 |
| (kgm) | 0.00188 |
| (kgm) | 0.01118 |
| Model 1 Case | Description | Illustration |
|---|---|---|
| Case 1 | Initially balanced with contracted tail, 0.385 kg, 0.564 m. |  |
| Case 2 | Disturbed and unbalanced with contracted tail, 0.425 kg, 0.564 m. |  |
| Case 3 | Disturbed and balanced with extended tail, 0.385 kg, 0.614 m. |  |
 represents the added mass.
represents the added mass.| Model 1 Case | Range of | Range of |
|---|---|---|
| Case 1 | −14.5 to −0.0798 | 4.18 W to 23 W |
| Case 2 | −21.2 to −0.763 | 5.4 W to 24 W |
| Case 3 | −17 to −0.309 | 5.07 W to 23.4 W |
| Model 2 Case | Description | Illustration |
|---|---|---|
| Case 1 | Initially balanced with deflected tail, 0.385 kg, . |  |
| Case 2 | Disturbed and unbalanced with deflected tail, 0.425 kg ,. |  |
| Case 3 | Disturbed and balanced with undeflected tail, 0.425 kg, |  |
 represents the added mass.
represents the added mass.| Model 2 Case | Range of | Range of |
|---|---|---|
| Case 1 | −6.9 to 0.251 | 3.57 W to 22.6 W |
| Case 2 | −13 to −0.415 | 4.74 W to 23.5 W |
| Case 3 | −12.7 to 0.142 | 4.71 W to 22.9 W |
| Control Effector Used | Average Specific Energy (m) | Average Specific Excess Power (m/s) |
|---|---|---|
| 105.096 | −0.007 | |
| (m) | 105.105 | 0.0069 |
| (m/s) | (m) | (m) | (m) | (N) | |||
|---|---|---|---|---|---|---|---|
| 10 | 100 | 0.264 | 0.4 | −30 | −0.66 | −0.863 | 0.786 |
| Control Effector Used | Average Specific Energy (m) | Average Specific Excess Power (m/s) |
|---|---|---|
| 105.093 | −0.014 | |
| 105.103 | 0.0043 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogunwa, T.; McIvor, B.; Jumat, N.A.; Abdullah, E.; Chahl, J. Longitudinal Actuated Abdomen Control for Energy Efficient Flight of Insects. Energies 2020, 13, 5480. https://doi.org/10.3390/en13205480
Ogunwa T, McIvor B, Jumat NA, Abdullah E, Chahl J. Longitudinal Actuated Abdomen Control for Energy Efficient Flight of Insects. Energies. 2020; 13(20):5480. https://doi.org/10.3390/en13205480
Chicago/Turabian StyleOgunwa, Titilayo, Blake McIvor, Nurkhairunisa Awang Jumat, Ermira Abdullah, and Javaan Chahl. 2020. "Longitudinal Actuated Abdomen Control for Energy Efficient Flight of Insects" Energies 13, no. 20: 5480. https://doi.org/10.3390/en13205480
APA StyleOgunwa, T., McIvor, B., Jumat, N. A., Abdullah, E., & Chahl, J. (2020). Longitudinal Actuated Abdomen Control for Energy Efficient Flight of Insects. Energies, 13(20), 5480. https://doi.org/10.3390/en13205480