Development and Assessment of an Over-Expanded Engine to be Used as an Efficiency-Oriented Range Extender for Electric Vehicles

 ,
,  ,
,  and
and 
Abstract
1. Introduction
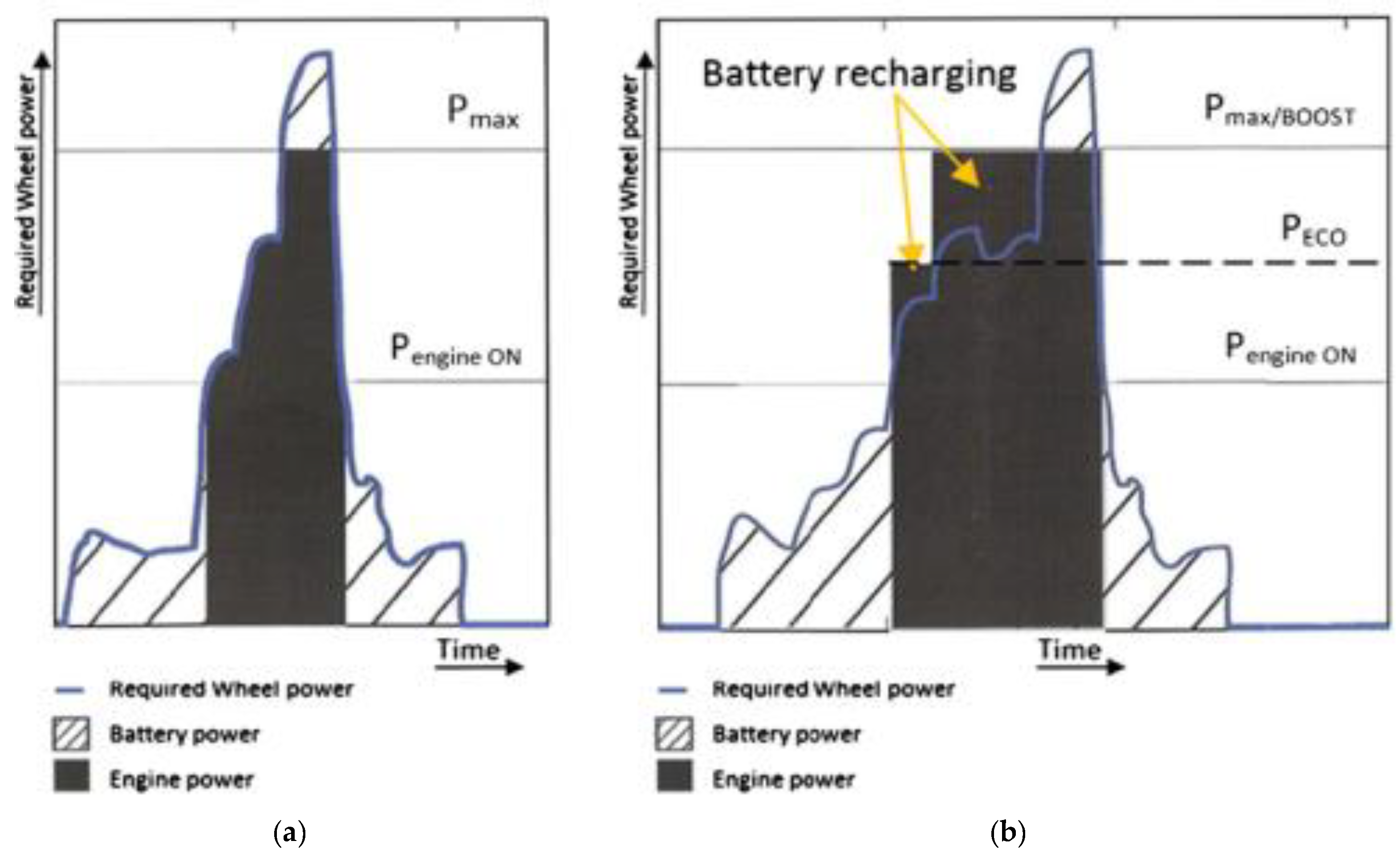
- (a)
- As the RE should be seldom used, the main interest is for it to be as small and as light as possible, not to interfere with the already heavy EV;
- (b)
- As the RE is a part of a very efficient and sustainable vehicle (the EV), it should be designed to be as efficient as possible.
2. Concept, Modeling Approach
3. Materials and Methods
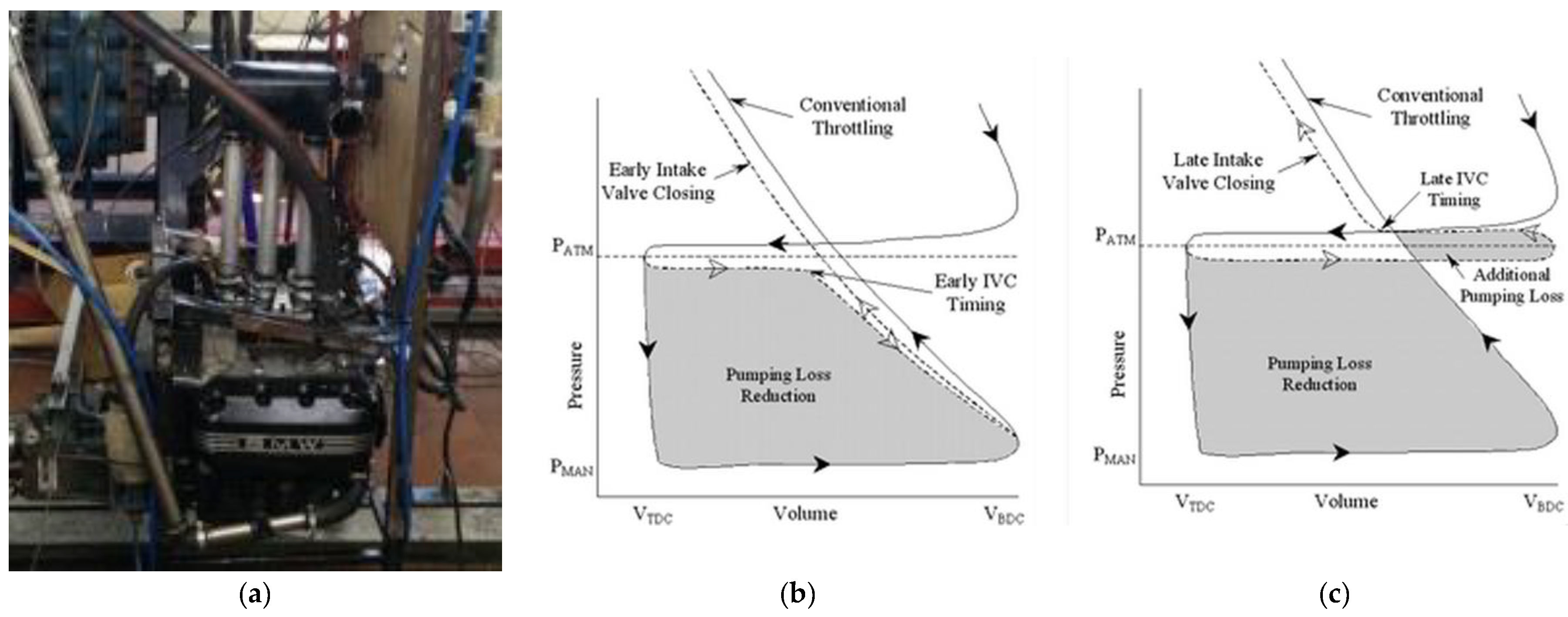
3.1. Engine Test Rig
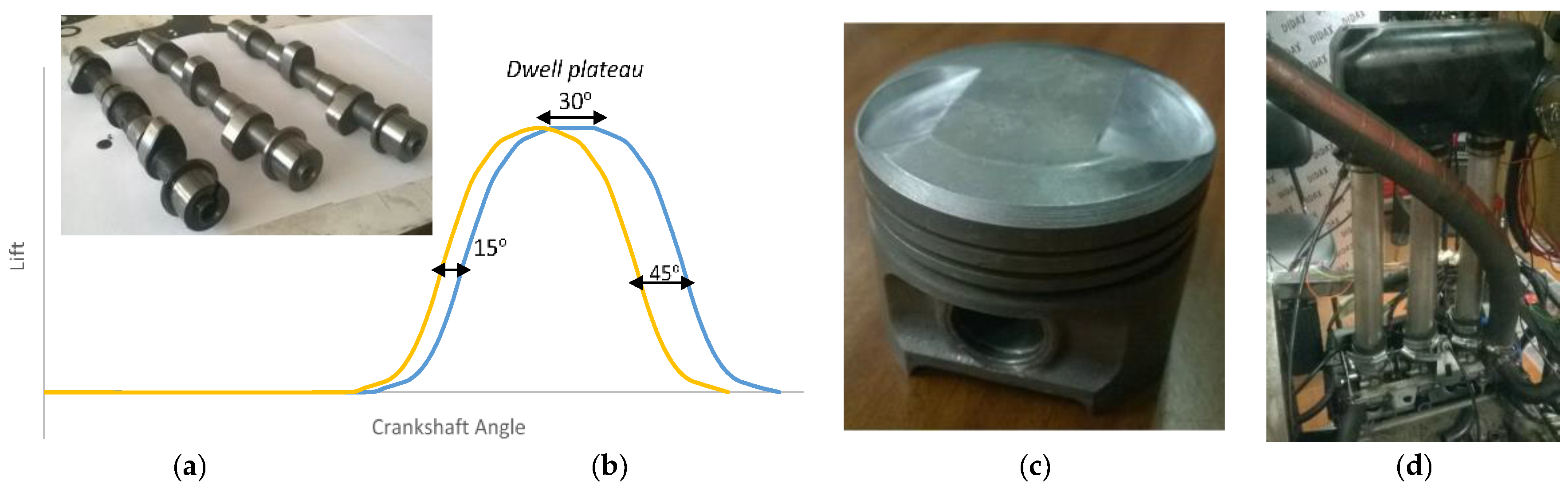
3.2. Engine Modifications
3.3. Driving Cycle Simulation Conditions
4. Results
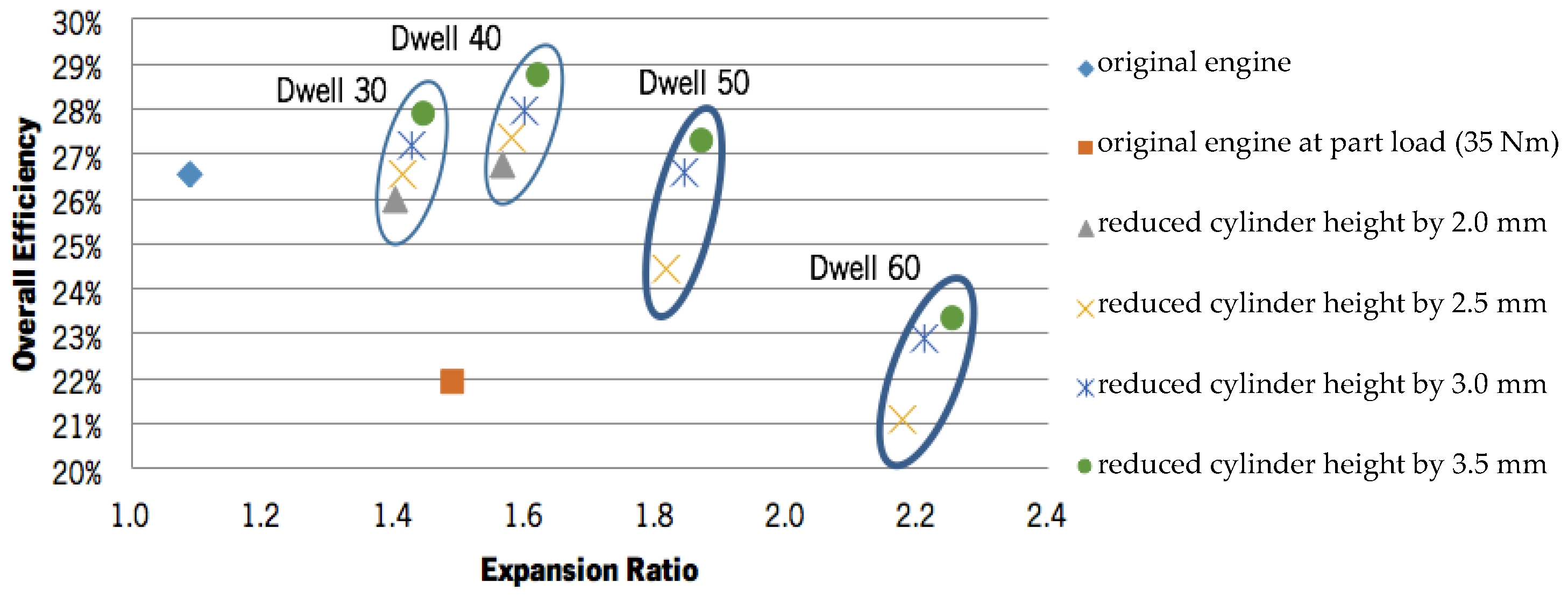
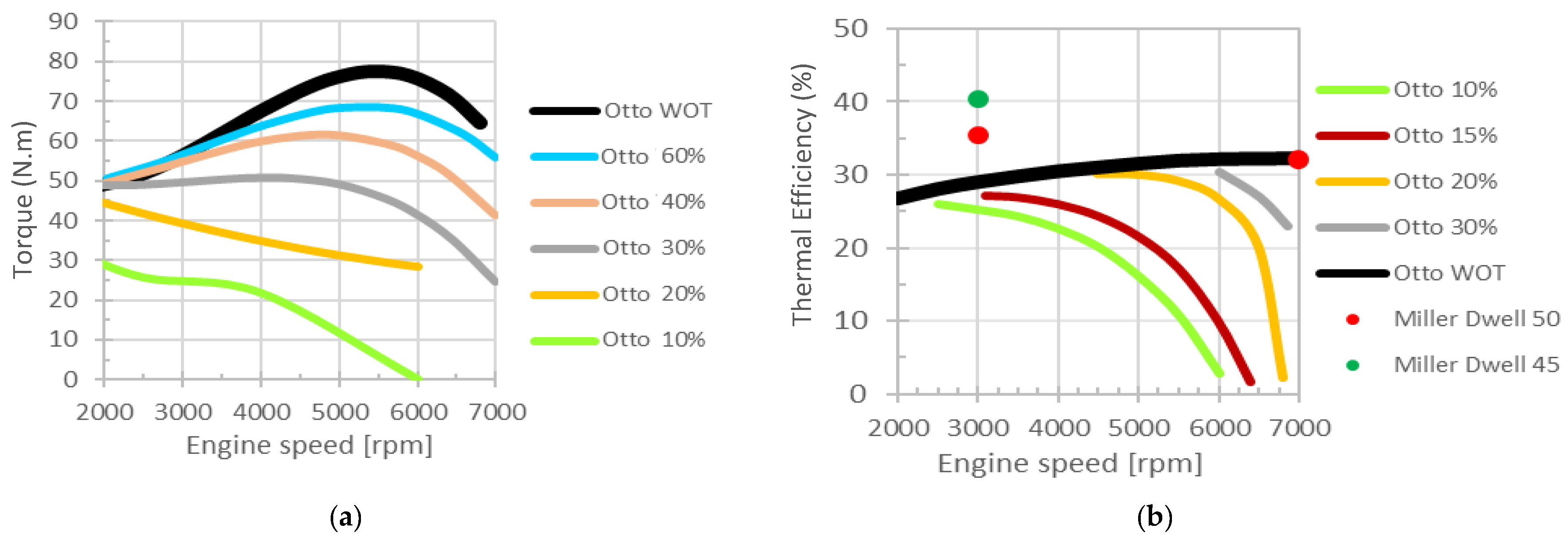
4.1. Engine Assessment
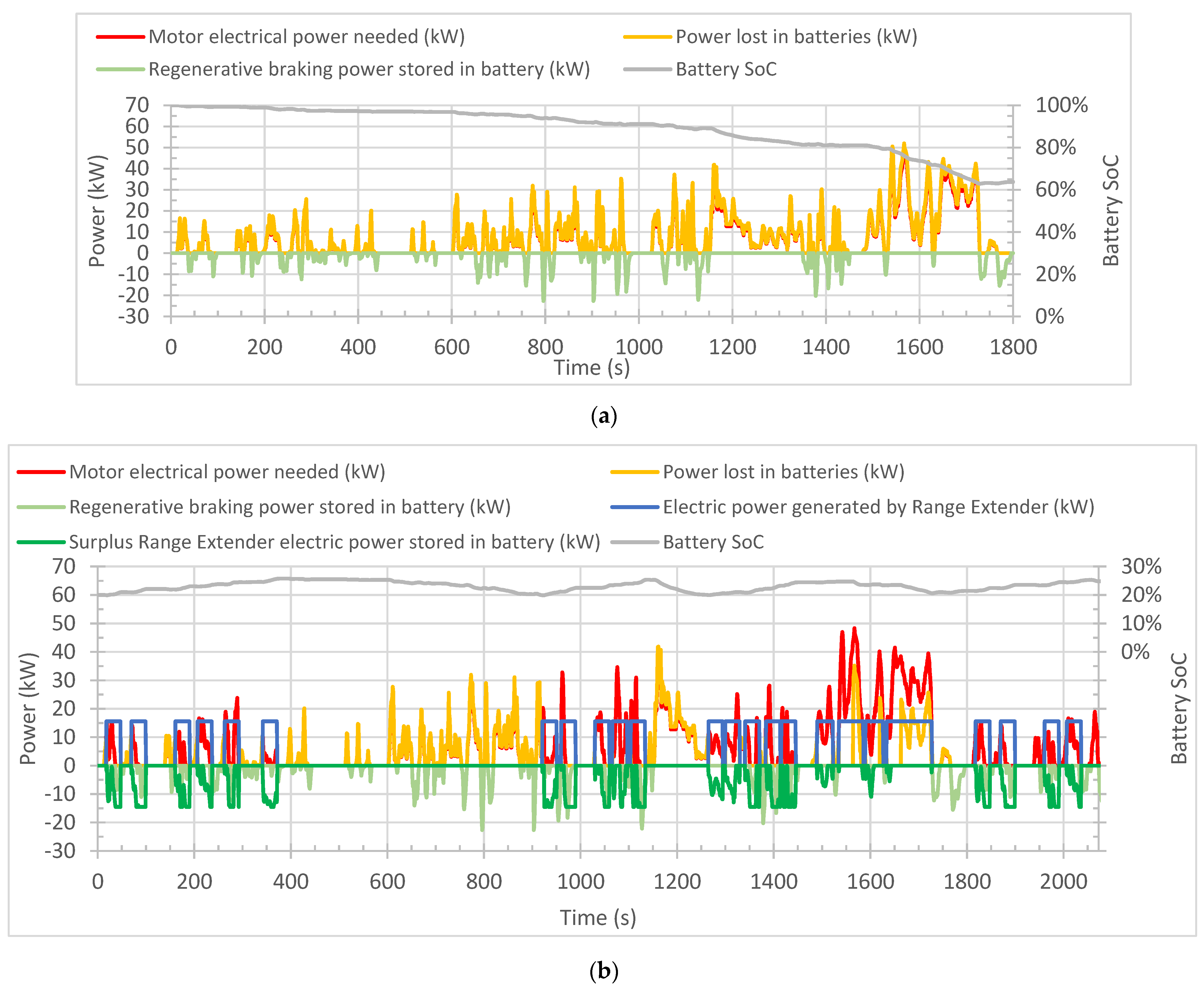
4.2. Driving Cycle Simulation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| λ | Air-fuel mixture strength |
| Kfuel | Coefficient for correcting the consumption according to the UN-ECE procedure |
| BEV | Battery Electric Vehicle |
| BOOST | High Power mode of operation of the developed Range Extender |
| BSFC | Brake Specific Fuel Consumption (g/kWh) |
| CD | Charge Depleting |
| CS | Charge Sustaining |
| CR | Compression Ratio |
| ECU | Engine Control Unit |
| ECO | High efficiency mode of operation of the developed Range Extender |
| EDAM | MIT-Portugal Engineering Design and Advanced Manufacturing program |
| EIVC | Early Intake Valve Closure |
| ER | Expansion Ratio |
| ERDF | European Regional Development Fund (FEDER in Portuguese) |
| EREV | Extended Range Electric Vehicle |
| EV | Electric Vehicle |
| FCT | Fundação para a Ciência e a Tecnologia (Portuguese funding agency) |
| LCA | Life Cycle Analysis |
| LIVC | Late Intake Valve Closure |
| MEtRICs | Mechanical Engineering and Resource Sustainability Centre |
| PHEV | Plug-in Hybrid Electric Vehicle |
| PIDDAC | Central Administration Program for Investment and Developt. Costs (Portuguese) |
| RE | Range Extender |
| SoC | Battery State of Charge |
| TCO | Total Costs of Ownership |
| TDC | Top Dead Centre |
| TPS | Throttle Position Sensor |
| UF | Utility Factor |
| UN-ECE | United Nations Economic Commission for Europe |
| WLTC | Worldwide-harmonized Light-vehicle Test driving Cycle |
| WLTP | Worldwide-harmonized Light-vehicle Test Procedure |
| WOT | Wide Open Throttle |
References
- Chen, W.; Liang, J.; Yang, Z.; Li, G. A Review of Lithium-Ion Battery for Electric Vehicle Applications and Beyond. Energy Procedia 2019, 158, 4363–4368. [Google Scholar] [CrossRef]
- Ribau, J.; Silva, C.; Brito, F.P.; Martins, J. Analysis of four-stroke, Wankel, and microturbine based range extenders for electric vehicles. Energy Convers. Manag. 2012, 58, 120–133. [Google Scholar] [CrossRef]
- The Media Portal by Porsche Ultra-High-Power Charging Technology for the Electric Vehicle of The Future. Available online: https://newsroom.porsche.com/en/company/porsche-fastcharge-prototype-charging-station-ultra-high-power-charging-technology-electric-vehicle-16606.html (accessed on 15 November 2019).
- Martins, J.; Brito, F.P. Carros Elétricos; Publindústria: Porto, Portugal, 2012; ISBN 978-972-8692-64-3. [Google Scholar]
- Simeu, S.K.; Brokate, J.; Stephens, T.; Rousseau, A. Factors influencing energy consumption and cost-competiveness of plug-in electric vehicles. World Electr. Veh. J. 2018, 9, 23. [Google Scholar] [CrossRef]
- Letmathe, P.; Suares, M. A consumer-oriented total cost of ownership model for different vehicle types in Germany. Transp. Res. Part D Transp. Environ. 2017, 57, 314–335. [Google Scholar] [CrossRef]
- Cunha, Á.; Brito, F.P.; Martins, J.; Rodrigues, N.; Monteiro, V.; Afonso, J.L.; Ferreira, P. Assessment of the use of vanadium redox flow batteries for energy storage and fast charging of electric vehicles in gas stations. Energy 2016, 115, 1478–1494. [Google Scholar] [CrossRef]
- Redelbach, M.; Özdemir, E.D.; Friedrich, H.E. Optimizing battery sizes of plug-in hybrid and extended range electric vehicles for different user types. Energy Policy 2014, 73, 158–168. [Google Scholar] [CrossRef]
- United Nations Economic Commission for Europe (UN-ECE) UN Regulation UN-ECE R101. Available online: https://www.unece.org/trans/main/wp29/wp29regs101-120.html (accessed on 15 November 2019).
- Riemersma, I.; Mock, P. Too Low to be True? How to Measure Fuel Consumption and CO2 Emissions of Plug-In Hybrid Vehicles, Today and in the Future; ICCT Briefing; International Council on Clean Transportation: Washington, DC, USA, 2017. [Google Scholar]
- Pavlovic, J.; Tansini, A.; Fontaras, G.; Ciuffo, B.; Otura, M.G.; Trentadue, G.; Bertoa, R.S.; Torino, P. The Impact of WLTP on the Official Fuel Consumption and Electric Range of Plug-in Hybrid Electric Vehicles in Europe. SAE Tech. Pap. 2017, 2017-24-0133. [Google Scholar] [CrossRef]
- SAE International Hybrid-EV Committee. J2841: Utility Factor Definitions for Plug-In Hybrid Electric Vehicles Using Travel Survey Data-SAE International; SAE International Hybrid-EV Committee, SAE International: Warrendale, PA, USA, 2010. [Google Scholar] [CrossRef]
- Vehicle Certification Agency Download Car Fuel and Emissions Information. Available online: https://carfueldata.vehicle-certification-agency.gov.uk/downloads/default.aspx (accessed on 21 November 2019).
- EV Database UK. Available online: https://ev-database.uk/ (accessed on 21 November 2019).
- Electric Car Database | EVDB.io. Available online: https://evdb.io/ (accessed on 21 November 2019).
- Heywood, B.J. Internal Combustion Engine Fundamentals; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- Evarts, C. How the Media May Have Punctured Plug-In Hybrids’ Balloon, Green Car Reports. Available online: https://www.greencarreports.com/news/1120073_commentary-how-the-media-may-have-punctured-plug-in-hybrids-balloon (accessed on 24 November 2019).
- Berman, B. BMW Keeps Doubling Energy Density of I3 Batteries, Enough to Kill Range-Extending Engine for Good-Electrek. Available online: https://electrek.co/2019/11/22/bmw-keeps-doubling-energy-density-of-i3-batteries-enough-to-kill-range-extending-engine-for-good/ (accessed on 24 November 2019).
- Frost & Sullivan Electrics are the Future for Light Commercial Vehicles. Available online: https://ww2.frost.com/frost-perspectives/electrics-are-future-light-commercial-vehicles/ (accessed on 27 November 2019).
- Burgess, R. Mazda RX-9 Hopes Boosted by New Rotary-Engine Technology | Autocar. Available online: https://www.autocar.co.uk/car-news/new-cars/mazda-rx-9-hopes-boosted-new-rotary-engine-technology (accessed on 27 November 2019).
- Ortego, A.; Valero, A.; Valero, A.; Restrepo, E. Vehicles and critical raw materials: A sustainability assessment using thermodynamic rarity. J. Ind. Ecol. 2018, 22, 1005–1015. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2018; ISBN 9780429504884. [Google Scholar]
- Ribeiro, B.; Brito, F.; Martins, J. A Survey on Electric/Hybrid Vehicles. SAE Tech. Pap. 2010, 2010-01-0856. [Google Scholar] [CrossRef]
- Hu, P.S.; Reuscher, T.R. Summary of Travel Trends: 2001 National Household Travel Survey; U. S. Department of Transportation, Federal Highway Administration: Washington, DC, USA, 2004.
- Ribeiro, B.; Martins, J. Direct comparison of an engine working under otto, miller and diesel cycles: Thermodynamic analysis and real engine performance. SAE Tech. Pap. 2007. [Google Scholar] [CrossRef]
- LEVC TX—The Electric Taxi | Order Book Now Open | LEVC. Available online: https://www.levc.com/media-pr/tx-electric-taxi/ (accessed on 28 February 2019).
- Noga, M. Application of the internal combustion engine as a range-extender for electric vehicles. Combust. Engines 2013, 154, 781–786. [Google Scholar]
- Mahle MAHLE Powertrain | MAHLE Compact Range Extender Engine. Available online: https://www.mahle-powertrain.com/en/experience/mahle-compact-range-extender-engine/ (accessed on 28 February 2019).
- Rheinmetall Automotive Range Extender Rheinmetall Automotive. Available online: https://www.rheinmetall-automotive.com/en/products/range-extender/ (accessed on 28 February 2019).
- Martins, L.A.S.B.; Araujo, B.J.O.; Martins, J.J.G.; Brito, F.C.P. Methodology for the energy characterization of type-approval and realworld driving cycles for passenger vehicles. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Proceedings (IMECE), Houston, TX, USA, 13–19 November 2015; Volume 6A-2015. [Google Scholar]
- Martins, J.J.G.; Uzuneanu, K.; Ribeiro, B.S.; Jasasky, O. Thermodynamic Analysis of an Over-Expanded Engine. SAE Trans. 2004, 113, 476–490. [Google Scholar]
- Annand, W.J.D.; Ma, T.H. Instantaneous Heat Transfer Rates to the Cylinder Head Surface of a Small Compression-Ignition Engine. Proc. Inst. Mech. Eng. 1970, 185, 976–987. [Google Scholar] [CrossRef]
- Sandoval, D.; Heywood, J.B. An Improved Friction Model for Spark-Ignition Engines. SAE Trans. 2003, 112, 1041–1052. [Google Scholar]
- AVL AVL BOOST-avl.com. Available online: https://www.avl.com/boost (accessed on 28 February 2019).
- Mechadyne Intake Valve Closing Strategies. Available online: https://www.mechadyne-int.com/reference/throttle-less-operation/intake-valve-closing-strategies/ (accessed on 1 March 2019).
- MegaSquirt MegaSquirt 2 | MegaSquirt. Available online: http://megasquirt.info/products/ms-complete/ms2/ (accessed on 28 February 2019).
- Santos, P.J. Desenvolvimento de um Range Extender baseado num motor BMW K75-Transformação de ciclo Otto para ciclo Miller. Master’s Thesis, Universidade do Minho, Escola de Engenharia, Guimaraes, Portugal, 2013. [Google Scholar]
- Martins, J. Internal Combustion Engines, 5th ed.; Publindústria: Porto, Portugal, 2016; ISBN 972895302X. (In Portuguese) [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Vehicle Mass | Reported Battery Capacity | WLTP | ||||
|---|---|---|---|---|---|---|---|
| Elect. Range | Elect. Consump. | Fuel Consump. | Calculated Battery Capacity | Europe Sale Label Consump. | |||
| kg | kWh | km (CD) | kWh/100 km (CD) | L/100 km (CS) | kWh | L/100 km | |
| Hyundai Ioniq Plug-In | 1495 | 7.6 | 52 | 14.1 | 4.2 | 7.3 | 1.1 |
| Toyota Prius Plug-In | 1530 | 6.4–7.0 | 43 | 14.4 | 4.1 | 6.2 | 1 |
| BMW I3 REx 120 Ah | 1365 | 37.9 | 308 | 13.2 | 6.7 | 40.7 | - |
| VW Golf GTE | 1499 | 7 | 37 | 18.9 | 5.4 | 7.0 | 1.6 |
| Vehicle, Fuel Specifications | |
| Vehicle Mass, M (kg)/Rotational Inertia Coefficient, IR | 1400/1.05 |
| Distance between Axes (m) | 2.64 |
| Centre of Mass height/distance to front-axis (m) | 0.59/0.5 |
| Rolling Resistance Coefficient, RRC/Slip Ratio Coefficient (K) | 0.008/0.15 |
| Vehicle Frontal Area, (m2)/Drag Coefficient, Cd | 2.22/0.27 |
| Fuel Lower Heating value (MJ/kg)/density (kg/L) | 44/750 |
| Hybrid Powertrain Specifications | |
| Battery max. power (kW)/capacity total (kWh)/usable CD mode (kWh) | 50/9.1/7.3 |
| Battery average one way efficiency (either charging or discharging) | 93% |
| Electric motor/regen maximum power (kW)/average efficiency | 50/85% |
| RE ECO engine power (kW)/efficiency | 16.4/41% |
| RE BOOST engine power (kW)/efficiency | 36.7/32% |
| RE generator efficiency/Minimum straight RE operation time (s) | 95%/30 |
| Power and SoC Threshold Levels | |
| Maximum Power for EV mode under CS (kW) | <10 |
| Battery SoC lower limit for EV mode under CS | <5% |
| Battery SoC level for switching from CD to CS | <20% |
| Battery SoC level for switching from CS to CD | >25% |
| CD Mode—WLTC | |
| Distance (km) | 23.3 |
| Initial—Final battery SoC | 36.3% |
| Initial—Final battery energy (kWh) | 3.32 |
| Range Extender—Total consumption per 100 km (L/100 km) | 0.0 |
| CD Electric consumption (kWh/100 km) | 14.3 |
| CD Specific electric consumption (kWh/km/kg) | 1.02 |
| Range in CD mode (100% to minimum CD SoC 20%) (km) | 52.3 |
| CS mode—Extended WLTC (25 km) | |
| Distance (km) | 25 |
| Initial—Final battery SoC | −4.8% |
| Initial—Final battery energy (kWh) | −0.44 |
| Range Extender—Total consumption (L/100 km) | 3.96 |
| Parameters for consumption correction (due to different initial/final SoC): | |
| Motor electrical energy needed (kWh) for whole cycle (25 km) | 4.0 |
| Energy requirement kWh/100 km | 15.9 |
| Kfuel (L/100 km)/(kWh/100 km) | 0.25 |
| Corrected CS consumption (higher final SoC) (L/100 km) | 3.85 |
| Corrected CS specific consumption (higher final SoC) (L/(km·kg)) | 0.28 |
| Corrected CS CO2 emissions (g/km) | 88.9 |
| Estimation of official consumption (UF = 0.77) L/100 km | 0.88 |
| Estimation of official CO2 emissions (UF = 0.77) g/km | 20.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brito, F.P.; Martins, J.; Lopes, F.; Castro, C.; Martins, L.; Moreira, A.L.N. Development and Assessment of an Over-Expanded Engine to be Used as an Efficiency-Oriented Range Extender for Electric Vehicles. Energies 2020, 13, 430. https://doi.org/10.3390/en13020430
Brito FP, Martins J, Lopes F, Castro C, Martins L, Moreira ALN. Development and Assessment of an Over-Expanded Engine to be Used as an Efficiency-Oriented Range Extender for Electric Vehicles. Energies. 2020; 13(2):430. https://doi.org/10.3390/en13020430
Chicago/Turabian StyleBrito, F. P., Jorge Martins, Francisco Lopes, Carlos Castro, Luís Martins, and A. L. N. Moreira. 2020. "Development and Assessment of an Over-Expanded Engine to be Used as an Efficiency-Oriented Range Extender for Electric Vehicles" Energies 13, no. 2: 430. https://doi.org/10.3390/en13020430
APA StyleBrito, F. P., Martins, J., Lopes, F., Castro, C., Martins, L., & Moreira, A. L. N. (2020). Development and Assessment of an Over-Expanded Engine to be Used as an Efficiency-Oriented Range Extender for Electric Vehicles. Energies, 13(2), 430. https://doi.org/10.3390/en13020430