Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems





Abstract
1. Introduction
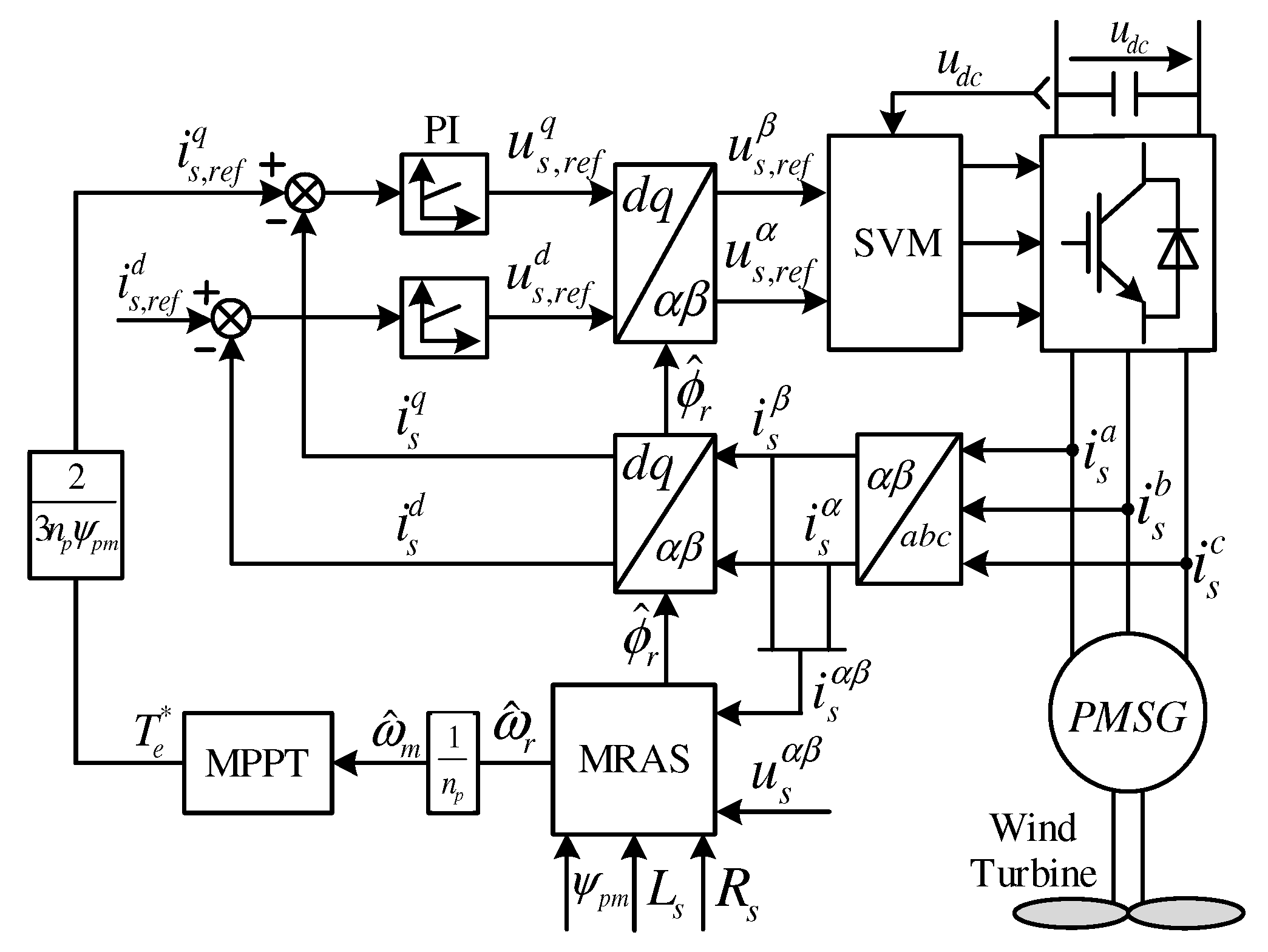
2. Modeling and Control of the SMPMSG
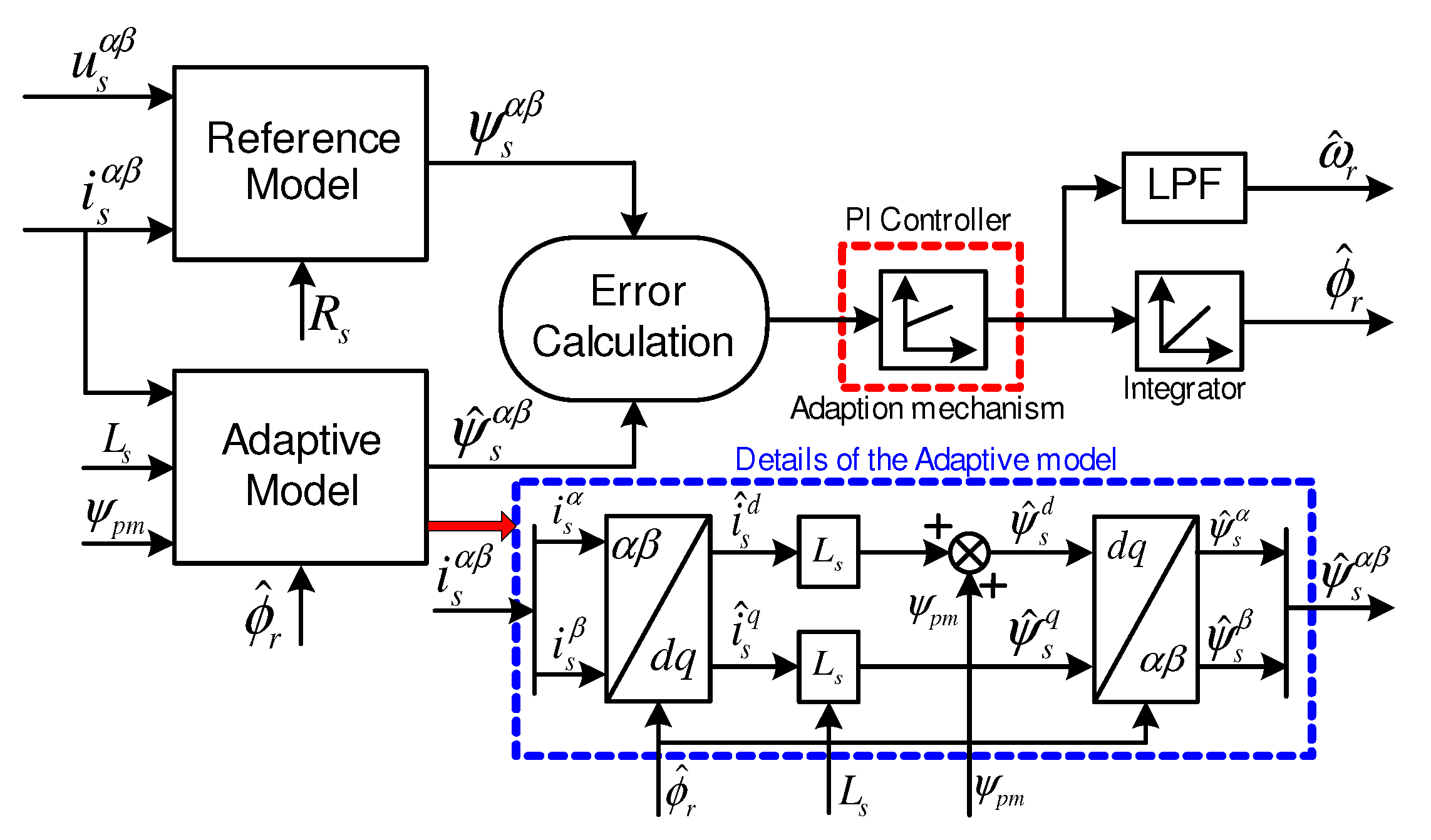
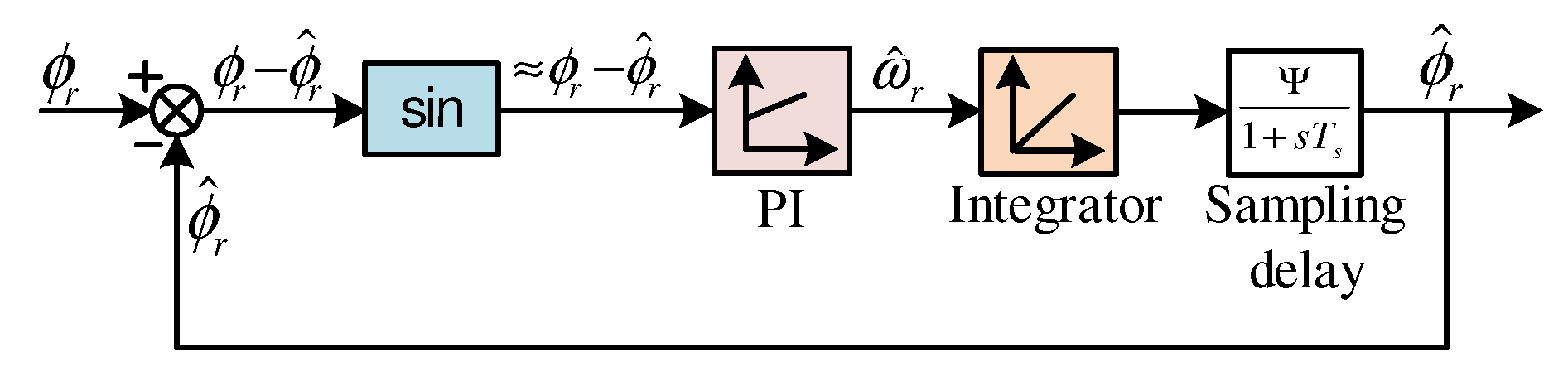
3. Classical MRAS Observer for SMPMSGs
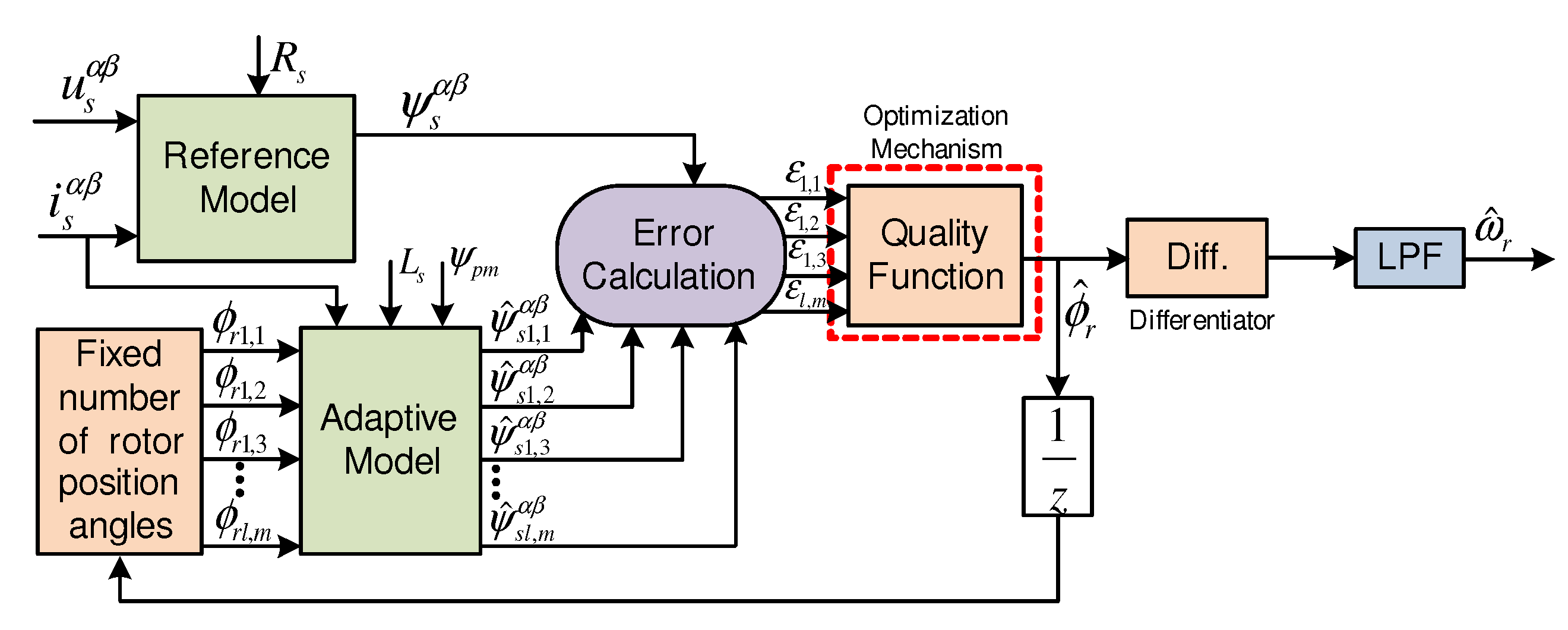
4. Proposed MRAS with Finite-Set Observer for SMPMSGs
| Algorithm 1 MRAS-FS Observer for SMPMSGs |
|
Advantages and Disadvantages of the Proposed MRAS-FS Observer
- no gains to tune, i.e., the effort and time consumed in the tuning of the fixed gain PI regulator in the conventional MRAS observer are avoided in the proposed MRAS-FS observer;
- the dynamics of the presented MRAS-FS observer are better than the traditional dynamics due to the use of FCS-MPC principles in the design of the suggested MRAS-FS observer;
- the suggested algorithm is not complicated and can be used in other types of machines with only small modifications.
- based on Algorithm 1, 64 iterations were essential for estimating the optimal angle of the rotor position of the SMPMSG, in other words, the calculation burden of the suggested MRAS-FS observer is high. However, the current digital signal processors (DSPs) have a high calculation power, and accordingly, execution of such advanced observers can be easily realized.
5. Description of the Laboratory Setup
6. Experimental Results
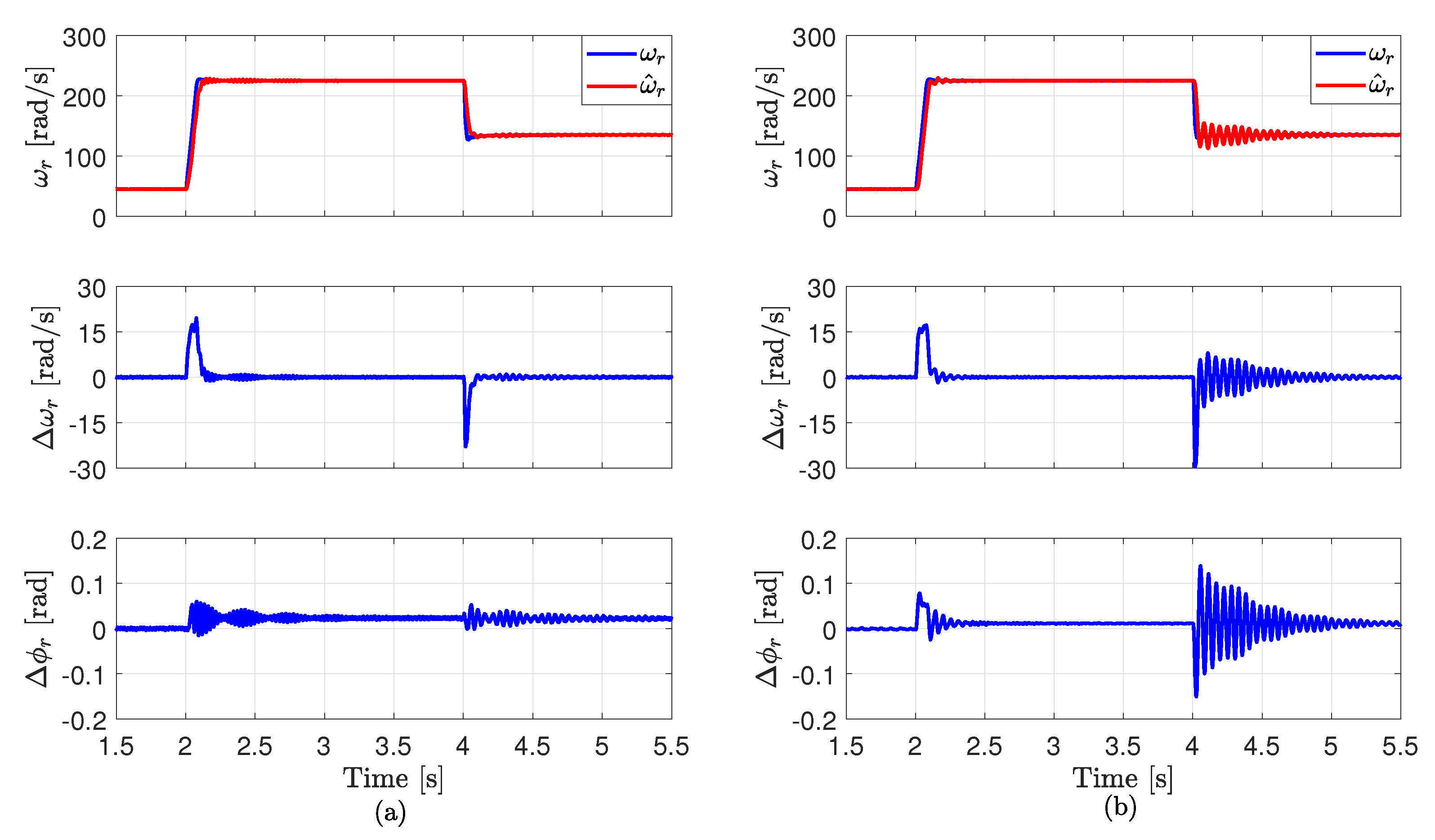
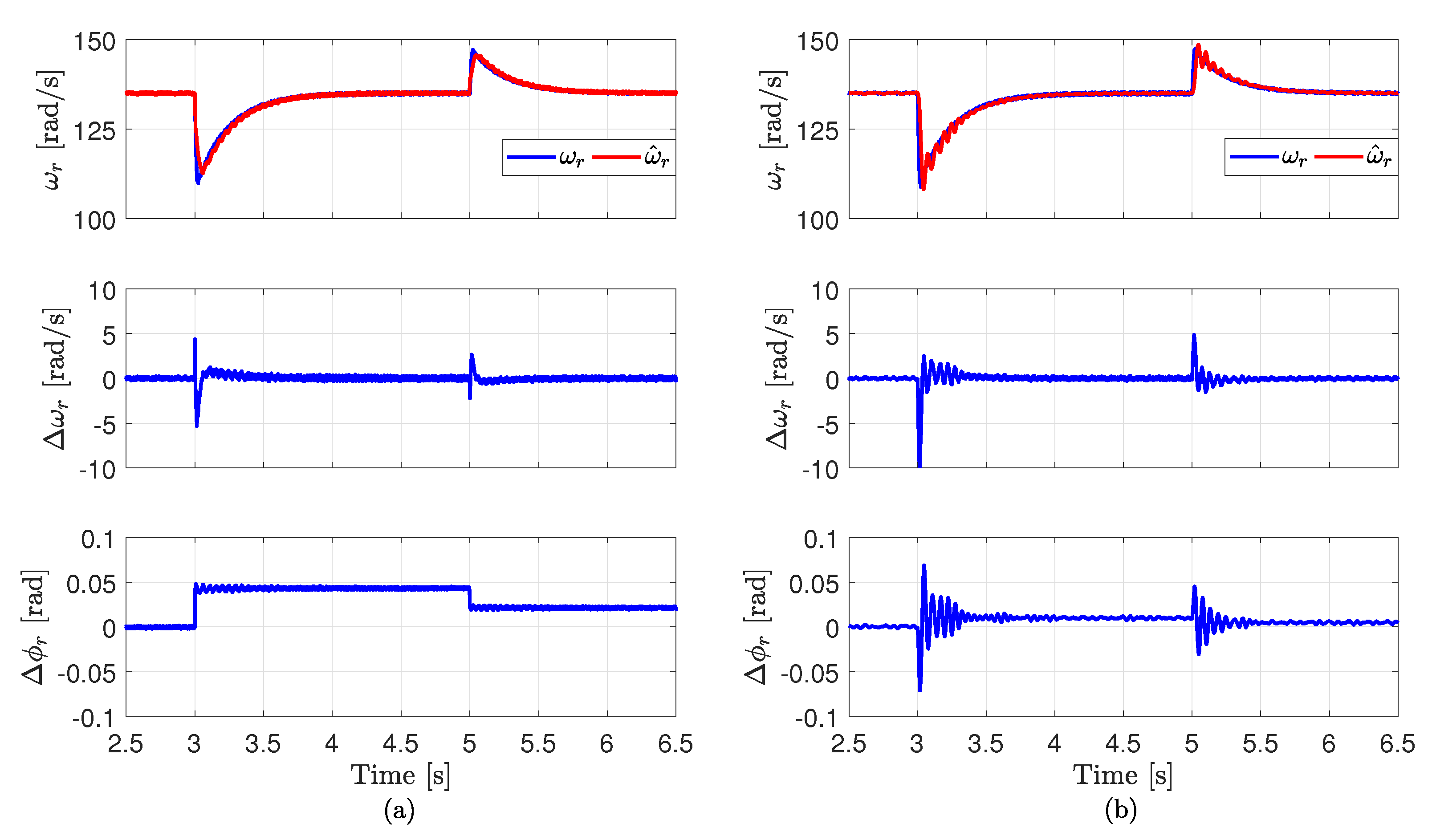
6.1. Dynamic Performance
- In Figure 6, step changes in the reference value of the mechanical angular speed from to and then back to were applied to the RSM control system, respectively. The reference electro-magnetic torque is regulated to be fixed at by the control algorithm of the SMPMSG.
- In Figure 7, the rotor reference mechanical angular speed is controlled to be constant at by the RSM. Step changes in the reference electro-magnetic torque from to and then back to were applied to the SMPMSG control scheme, respectively.
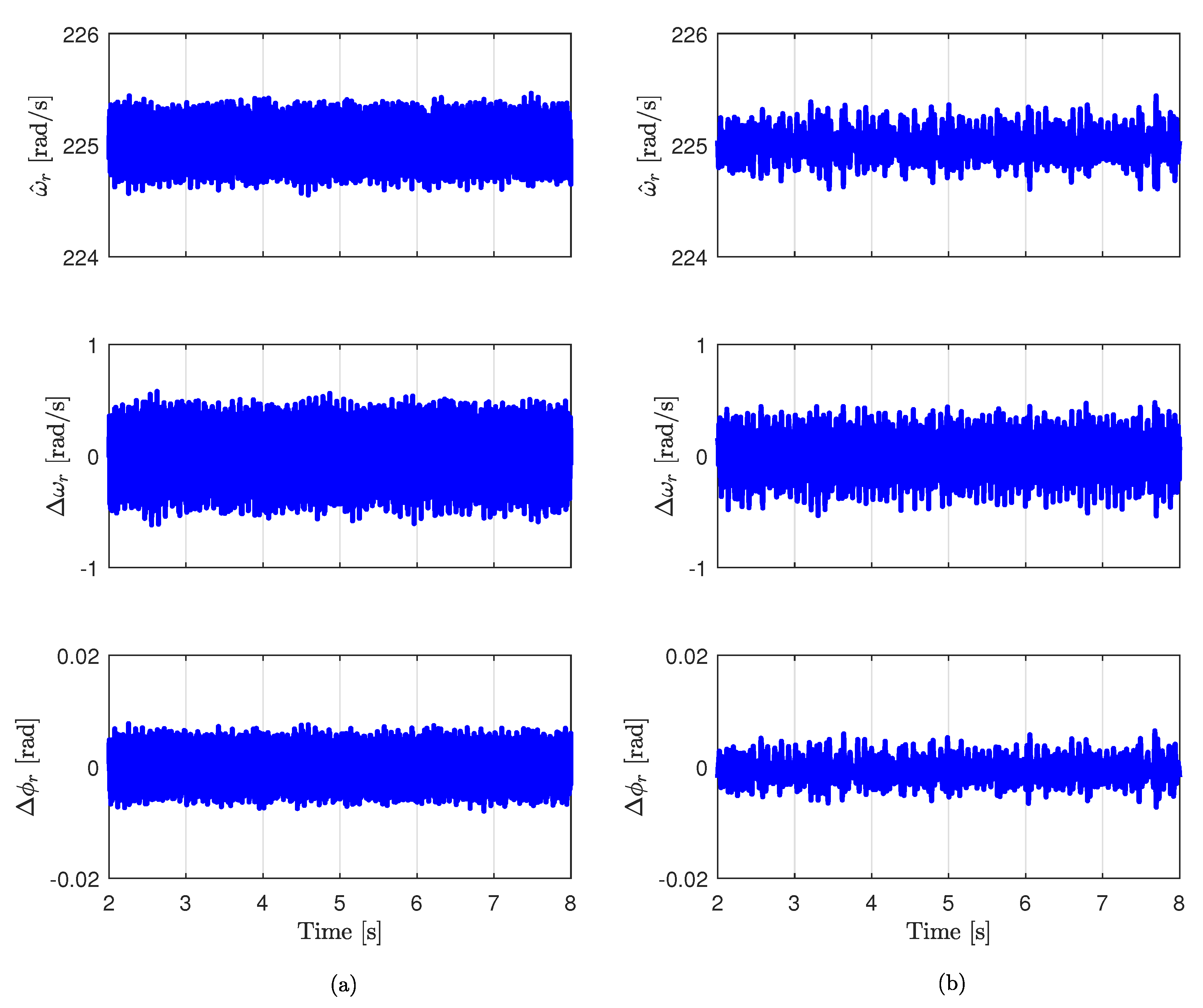
6.2. Steady-State Performance
- the rotor reference mechanical angular speed is regulated to using the RSM, and the reference electro-magnetic torque is regulated to be constant at by the control algorithm of the SMPMSG.
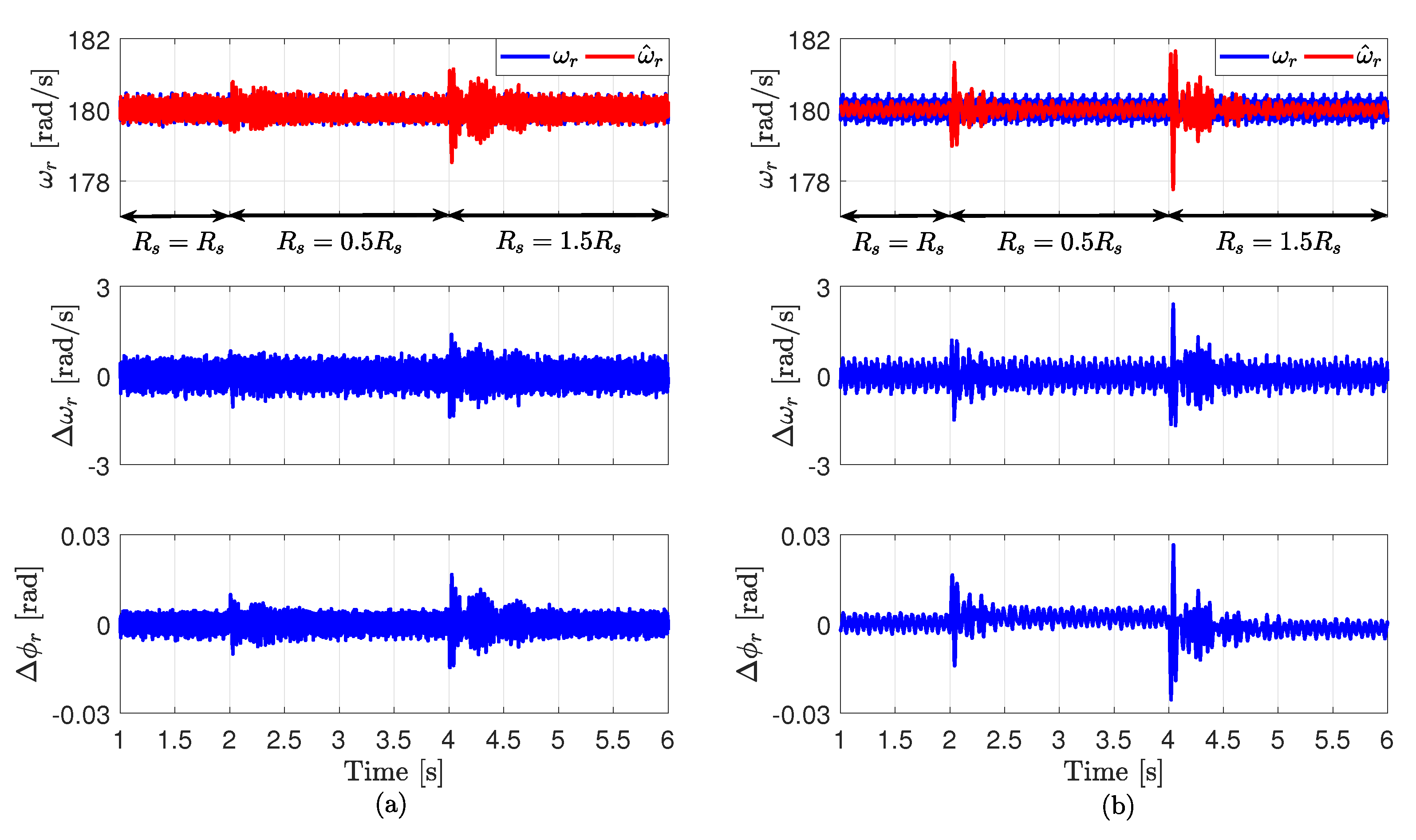
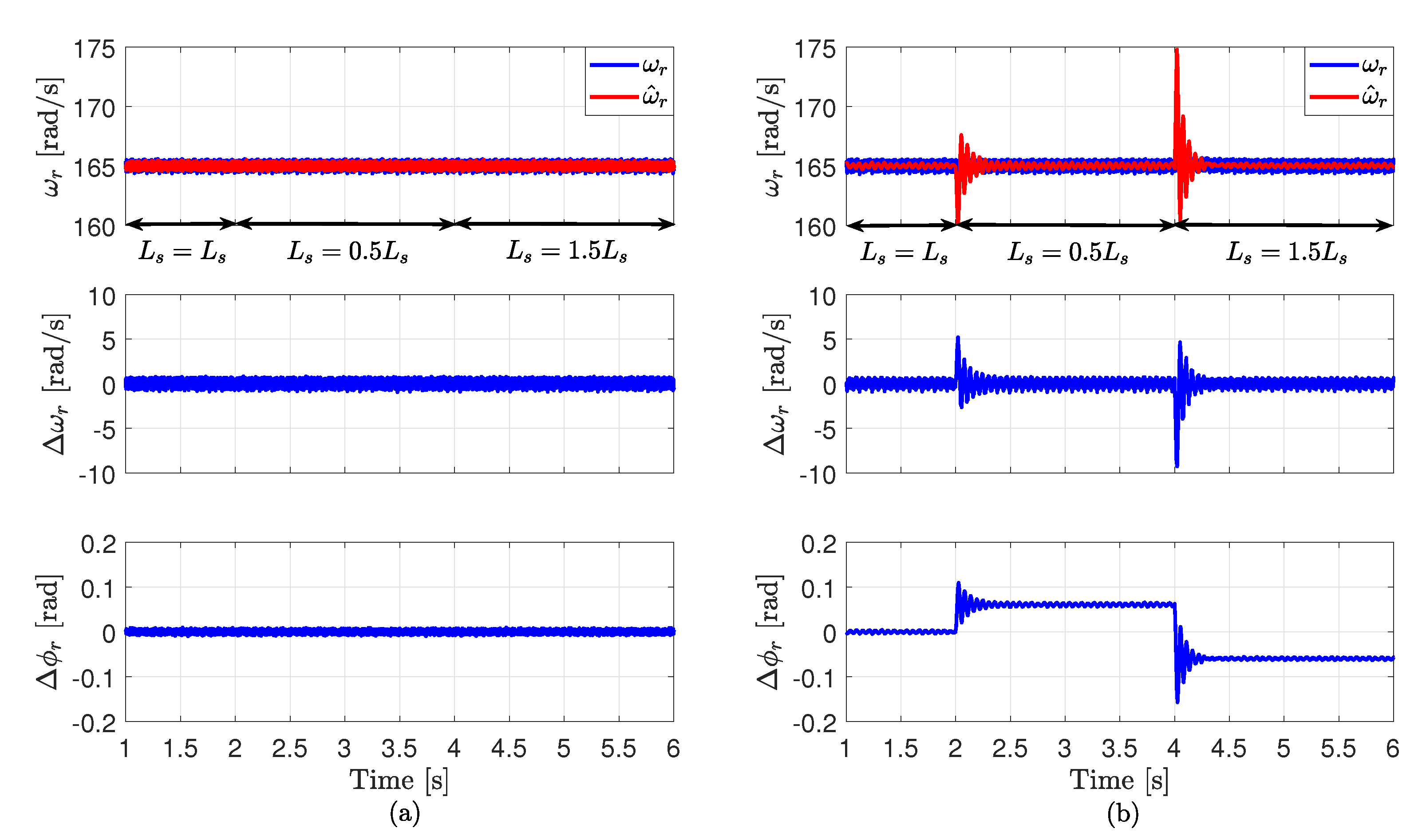
6.3. Performance at Variations of the SMPMSG Parameters
- in Figure 9, the reference mechanical angular speed of the rotor is set to by the RSM control strategy, and the reference electro-magnetic torque is regulated to be constant at by the control algorithm of the SMPMSG. The stator resistance is changed below/above its nominal value in the real-time model (i.e., within the software model);
- in Figure 10, the reference mechanical angular speed of the rotor is set to by the RSM control strategy, and the reference electro-magnetic torque is regulated to be constant at by the control algorithm of the SMPMSG.The stator inductance is changed below/above its nominal value in the real-time model (i.e., within the software model).
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| , , , | Stator voltages | SMPMSG | Surface-mounted permanent-magnet synchronous generator |
| , , , | Stator currents | VS-WGS | Variable-speed wind generation system |
| , , , | Stator fluxes | MRAS-FS | Model reference adaptive system with finite-set |
| Stator resistance | DMPC | Direct-model predictive control | |
| Stator inductance | DGS | Distributed generation system | |
| PM flux-linkage | RES | Renewable energy system | |
| Rotor electrical speed | DFIG | Doubly-fed induction generator | |
| Rotor electrical position | BTB | Back-to-back | |
| Electro-magnetic torque | WECS | Wind energy conversion system | |
| Mechanical torque | PI | Proportional-integral |
References
- Dasgupta, S.; Mohan, S.N.; Sahoo, S.K.; Panda, S.K. A Plug and Play Operational Approach for Implementation of an Autonomous-Micro-Grid System. IEEE Trans. Ind. Inform. 2012, 8, 615–629. [Google Scholar] [CrossRef]
- Kohn, W.; Zabinsky, Z.B.; Nerode, A. A Micro-Grid Distributed Intelligent Control and Management System. IEEE Trans. Smart Grid 2015, 6, 2964–2974. [Google Scholar] [CrossRef]
- Subramaniam, U.; Vavilapalli, S.; Padmanaban, S.; Blaabjerg, F.; Holm-Nielsen, J.B.; Almakhles, D. A Hybrid PV-Battery System for ON-Grid and OFF-Grid Applications—Controller-In-Loop Simulation Validation. Energies 2020, 13, 755. [Google Scholar] [CrossRef]
- Wind Energy in Europe in 2018, Annual Report. Available online: WindEurope.org (accessed on 7 September 2020).
- Datta, R.; Ranganathan, V.T. Variable-speed wind power generation using doubly fed wound rotor induction machine-a comparison with alternative schemes. IEEE Trans. Energy Convers. 2002, 17, 414–421. [Google Scholar] [CrossRef]
- Polinder, H.; van der Pijl, F.; de Vilder, G.; Tavner, P. Comparison of direct-drive and geared generator concepts for wind turbines. IEEE Trans. Energy Convers. 2006, 21, 725–733. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z. Overview of different wind generator systems and their comparisons. IET Renew. Power Gener. 2008, 2, 123–138. [Google Scholar] [CrossRef]
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in Wind Turbine Generator Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Li, S.; Haskew, T.A.; Swatloski, R.P.; Gathings, W. Optimal and Direct-Current Vector Control of Direct-Driven PMSG Wind Turbines. IEEE Trans. Power Electron. 2012, 27, 2325–2337. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Alepuz, S.; Asher, G. Overview of Control Systems for the Operation of DFIGs in Wind Energy Applications. IEEE Trans. Ind. Electron. 2013, 60, 2776–2798. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, C.; Zhang, Z.; Qiao, W. A Review on Position/Speed Sensorless Control for Permanent-Magnet Synchronous Machine-Based Wind Energy Conversion Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 203–216. [Google Scholar] [CrossRef]
- Tong, L.; Zou, X.; Feng, S.; Chen, Y.; Kang, Y.; Huang, Q.; Huang, Y. An SRF-PLL-Based Sensorless Vector Control Using the Predictive Deadbeat Algorithm for the Direct-Driven Permanent Magnet Synchronous Generator. IEEE Trans. Power Electron. 2014, 29, 2837–2849. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Implementation and experimental investigation of a sensorless field-oriented control scheme for permanent-magnet synchronous generators. Electr. Eng. 2018, 100, 849–856. [Google Scholar] [CrossRef]
- Mwinyiwiwa, B.; Zhang, Y.; Shen, B.; Ooi, B. Rotor Position Phase-Locked Loop for Decoupled P-Q Control of DFIG for Wind Power Generation. IEEE Trans. Energy Convers. 2009, 24, 758–765. [Google Scholar] [CrossRef]
- Uddin, M.N.; Patel, N. Maximum Power Point Tracking Control of IPMSG Incorporating Loss Minimization and Speed Sensorless Schemes for Wind Energy System. IEEE Trans. Ind. Appl. 2016, 52, 1902–1912. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Model Predictive Control of Permanent Magnet Synchronous Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the Power and Energy Student Summit (PESS 2016), Aachen, Germany, 19–20 January 2016. [Google Scholar]
- Cardenas, R.; Pena, R.; Clare, J.; Asher, G.; Proboste, J. MRAS observers for sensorless control of doubly-fed induction generators. IEEE Trans. Power Electron. 2008, 23, 1075–1084. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Encoderless Model Predictive Control of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. J. Phys. Conf. Ser. 2016, 753, 1–10. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Farhan, A.; Kennel, R. Finite-Set MRAS Observer for Encoderless Control of PMSGs in Wind Turbine Applications. In Proceedings of the IEEE Conference on Power Electronics and Renewable Energy (CPERE), Aswan City, Egypt, 23–25 October 2019; pp. 431–436. [Google Scholar]
- Abdelrahem, M.; Hackl, C.; Kennel, R. A Robust Encoderless Predictive Current Control Using Novel MRAS Observer for Surface-Mounted Permanent-Magnet Synchronous Generators. In Proceedings of the International Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management (PCIM), Nuremberg, Germany, 16–18 May 2017; pp. 113–120. [Google Scholar]
- Abdelrahem, M.; Hackl, C.; Dal, M.; Kennel, R.; Rodriguez, J. Efficient Finite-Position-Set MRAS Observer for Encoder-less Control of DFIGs. In Proceedings of the IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Quanzhou, China, 31 May–2 June 2019; pp. 1–6. [Google Scholar]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A Space-Vector-Modulated Sensorless Direct-Torque Control for Direct-Drive PMSG Wind Turbines. IEEE Trans. Ind. Appl. 2014, 50, 2331–2341. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Catterfeld, P.; Hackl, C.; Kennel, R. A Sliding-Mode-Observer for Encoderless Direct Model Predictive Control of PMSGs. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management (PCIM), Nuremberg, Germany, 5–7 June 2018; pp. 1–8. [Google Scholar]
- Mbukani, M.W.K.; Gule, N. Comparison of high-order and second-order sliding mode observer based estimators for speed sensorless control of rotor-tied DFIG systems. IET Power Electron. 2019, 12, 3231–3241. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Zhang, Z.; Kennel, R. Robust Predictive Control for Direct-Driven Surface-Mounted Permanent-Magnet Synchronous Generators Without Mechanical Sensors. IEEE Trans. Energy Convers. 2018, 33, 179–189. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Simplified Model Predictive Current Control without Mechanical Sensors for Variable-Speed Wind Energy Conversion Systems. Electr. Eng. 2017, 99, 367–377. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Sensorless Control of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the 5th International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 406–413. [Google Scholar]
- Afrasiabi, S.; Afrasiabi, M.; Rastegar, M.; Mohammadi, M.; Parang, B.; Ferdowsi, F. Ensemble Kalman Filter based Dynamic State Estimation of PMSG-based Wind Turbine. In Proceedings of the IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; pp. 1–4. [Google Scholar]
- Azad, S.P.; Tate, J.E. Parameter estimation of doubly fed induction generator driven by wind turbine. In Proceedings of the IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011; pp. 1–8. [Google Scholar]
- Prajapat, G.P.; Bhui, P.; Kumar, P.; Varma, S. Estimation based Maximum Power Point Control of DFIG based Wind Turbine Systems. In Proceedings of the IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 673–678. [Google Scholar]
- Elbuluk, M.; Tong, L.; Husain, I. Neural-network-based model reference adaptive systems for high-performance motor drives and motion controls. IEEE Trans. Ind. Appl. 2002, 38, 879–886. [Google Scholar] [CrossRef]
- Cirrincione, M.; Pucci, M. An MRAS-based sensorless high-performance induction motor drive with a predictive adaptive model. IEEE Trans. Ind. Electron. 2005, 52, 532–551. [Google Scholar] [CrossRef]
- Maiti, S.; Verma, V.; Chakraborty, C.; Hori, Y. An Adaptive Speed Sensorless Induction Motor Drive with Artificial Neural Network for Stability Enhancement. IEEE Trans. Ind. Inform. 2012, 8, 757–766. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. A new fuzzy logic based adaptation mechanism for MRAS sensorless vector control induction motor drives. In Proceedings of the IET Conference on Power Electronics, Machines and Drives (PEMD), York, UK, 2–4 April 2008; pp. 179–183. [Google Scholar]
- Samat, A.; Ishak, D.; Iqbal, S.; Tajudin, A. Implementation of Sugeno FIS in model reference adaptive system adaptation scheme for speed sensorless control of PMSM. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Batu Ferringhi, Malaysia, 28–30 November 2014; pp. 652–657. [Google Scholar]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. MRAS Sensorless Vector Control of an Induction Motor Using New Sliding-Mode and Fuzzy-Logic Adaptation Mechanisms. IEEE Trans. Energy Convers. 2010, 25, 394–402. [Google Scholar] [CrossRef]
- Azza, H.B.; Zaidi, N.; Jemli, M.; Boussak, M. Development and Experimental Evaluation of a Sensorless Speed Control of SPIM Using Adaptive Sliding Mode-MRAS Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 319–328. [Google Scholar] [CrossRef]
- Yan, J.; Lin, H.; Feng, Y.; Guo, X.; Huang, Y.; Zhu, Z.Q. Improved sliding mode model reference adaptive system speed observer for fuzzy control of direct-drive permanent magnet synchronous generator wind power generation system. IET Renew. Power Gener. 2013, 7, 28–35. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.; Franquelo, L.; Rodriguez, J.; Young, H.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R.; Rodriguez, J. Efficient Direct-Model Predictive Control with Discrete-Time Integral Action for PMSGs. IEEE Trans. Energy Convers. 2019, 34, 1063–1072. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Kennel, R. Efficient Direct Model Predictive Control for Doubly-Fed Induction Generators. Electr. Power Compon. Syst. 2017, 45, 574–587. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Finite set model predictive control with on-line parameter estimation for active frond-end converters. Electr. Eng. 2018, 100, 1497–1507. [Google Scholar]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Finite Position Set-Phase Locked Loop for Sensorless Control of Direct-Driven Permanent-Magnet Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 3097–3105. [Google Scholar]
- Schauder, C. Adaptive speed identification for vector control of induction motors without rotational transducers. IEEE Trans. Ind. Appl. 1992, 28, 1054–1061. [Google Scholar]
- Andreescu, G.D. Position and Speed Sensorless Control of PMSM Drives Based on Adaptive Observer. In Proceedings of the 8th European Conference on Power Electronics and Applications (EPE ’99), Lausanne, Switzerland, 7–9 September 1999; pp. 1–10. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Symbol | Value |
|---|---|---|
| Nominal power | ||
| Nominal line-line voltage of the SMPMSG stator | ||
| Rated voltage of the DC-link | ||
| Nominal mechanical angular speed of the rotor | ||
| Resistance of the SMPMSG stator | ||
| Inductance of the SMPMSG stator | ||
| Permanent-magnet flux linkage | ||
| Number of pole pairs | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahem, M.; Hackl, C.M.; Rodríguez, J.; Kennel, R. Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems. Energies 2020, 13, 4844. https://doi.org/10.3390/en13184844
Abdelrahem M, Hackl CM, Rodríguez J, Kennel R. Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems. Energies. 2020; 13(18):4844. https://doi.org/10.3390/en13184844
Chicago/Turabian StyleAbdelrahem, Mohamed, Christoph M. Hackl, José Rodríguez, and Ralph Kennel. 2020. "Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems" Energies 13, no. 18: 4844. https://doi.org/10.3390/en13184844
APA StyleAbdelrahem, M., Hackl, C. M., Rodríguez, J., & Kennel, R. (2020). Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems. Energies, 13(18), 4844. https://doi.org/10.3390/en13184844