Author Contributions
Conceptualization, Z.Z. and Z.X.; methodology, Z.X.; software, Z.Z.; validation, J.Y.; formal analysis, J.Y.; investigation, J.Y.; resources, Z.X.; data curation, Z.X.; writing—original draft preparation, J.Y.; writing—review and editing, Z.Z.; visualization, Z.Z.; supervision, Z.X.; project administration, Z.X.; funding acquisition, Z.X. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Structure of the hybrid high voltage direct current circuit breaker (HVDC CB).
Figure 1.
Structure of the hybrid high voltage direct current circuit breaker (HVDC CB).
Figure 2.
Protection action sequence of strategy 1.
Figure 2.
Protection action sequence of strategy 1.
Figure 3.
Protection action sequence of strategy 2.
Figure 3.
Protection action sequence of strategy 2.
Figure 4.
Structure of the designed test system.
Figure 4.
Structure of the designed test system.
Figure 5.
Responses of B24 under strategy 1: (a) currents flowing through load commutation switch (LCS), main breakers (MBs), and arrester; (b) voltages across ultra-fast disconnector (UFD), LCS, and arrester.
Figure 5.
Responses of B24 under strategy 1: (a) currents flowing through load commutation switch (LCS), main breakers (MBs), and arrester; (b) voltages across ultra-fast disconnector (UFD), LCS, and arrester.
Figure 6.
Responses of B42 under strategy 1: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
Figure 6.
Responses of B42 under strategy 1: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
Figure 7.
Responses of MMCs under strategy 1: (a) currents flowing through the smoothing reactors; (b) voltages across MMCs; (c) arm currents.
Figure 7.
Responses of MMCs under strategy 1: (a) currents flowing through the smoothing reactors; (b) voltages across MMCs; (c) arm currents.
Figure 8.
Currents flowing through eight HVDC breakers.
Figure 8.
Currents flowing through eight HVDC breakers.
Figure 9.
Responses of B24 under strategy 2: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
Figure 9.
Responses of B24 under strategy 2: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
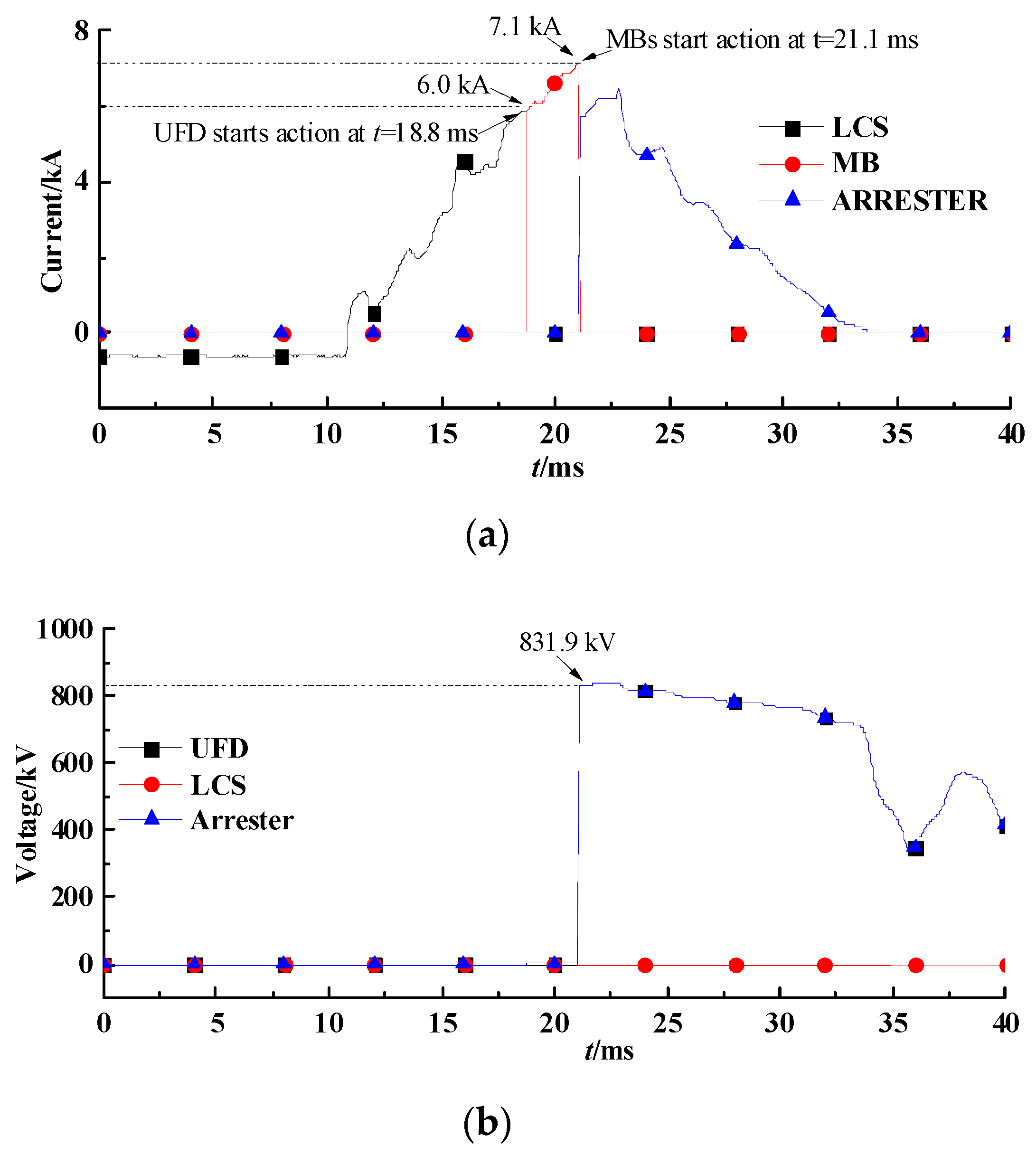
Figure 10.
Responses of B42 under strategy 2: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
Figure 10.
Responses of B42 under strategy 2: (a) currents flowing through LCS, MBs, and arrester; (b) voltages across UFD, LCS, and arrester.
Figure 11.
Responses of MMCs under strategy 2: (a) currents flowing through the smoothing reactors; (b) voltages across MMCs; (c) arm currents.
Figure 11.
Responses of MMCs under strategy 2: (a) currents flowing through the smoothing reactors; (b) voltages across MMCs; (c) arm currents.
Table 1.
Main parameters of the four-generator alternating current (AC) system.
Table 1.
Main parameters of the four-generator alternating current (AC) system.
| Item | Values |
|---|
| Generator G1-G4 |
| Rated RMS voltage | 20 kV |
| Rated 3 Phase MVA | 900 MVA |
| Td0′ | 8.0 s |
| Tq0′ | 0.4 s |
| Td0″ | 0.25 s |
| Tq0″ | 0.25 s |
| Xd | 7.2 Ω |
| Xq | 6.8 Ω |
| Xd’ | 1.2 Ω |
| Xq’ | 2.2 Ω |
| Xd″ | 1.0 Ω |
| Xq″ | 1.0 Ω |
| Transformer |
| Transformer ratio | 20 kV/230 kV |
| Positive sequence leakage reactance | 8.82 Ω |
| AC lines |
| Length | 100 km |
| +ve sequence R | 1.32 × 10−2 Ω/km |
| +ve sequence L | 1.32 × 10−1 H/km |
| +ve sequence C | 8.28 × 10−7 F/km |
Table 2.
Main parameters of multi-level modular converters (MMCs) in the test system.
Table 2.
Main parameters of multi-level modular converters (MMCs) in the test system.
| | MMC 1 | MMC 2 | MMC 3 | MMC 4 |
|---|
| Rated capacity/MVA | 750 | 1500 | 750 | 1500 |
| AC bus voltage/kV | 230 | 230 | 230 | 230 |
| Rated DC voltage/kV | 500 | 500 | 500 | 500 |
| Transformer rated capacity/MVA | 900 | 1800 | 900 | 1800 |
| Transformer nominal ratio | 230/255 | 230/255 | 230/255 | 230/255 |
| Transformer inductance/% | 15 | 15 | 15 | 15 |
| SM rated voltage/kV | 1.6 | 2.2 | 1.6 | 2.2 |
| Number of SMs per arm | 313 | 228 | 313 | 228 |
| SM capacitance/mF | 12 | 18 | 12 | 18 |
| Arm inductance/mH | 66 | 32 | 66 | 32 |
| Smoothing reactor/mH | 300 | 300 | 300 | 300 |
Table 3.
Control mode and reference value of MMCs.
Table 3.
Control mode and reference value of MMCs.
| MMC | Control Mode | Reference Value |
|---|
| 1 | d-axis: Constant active power control | Pdc1 = 200 MW; Qac1 = 0 Mvar |
| q-axis: Constant reactive power control |
| 2 | d-axis: Constant active power control | Pdc2 = 400 MW; Qac2 = 0 Mvar |
| q-axis: Constant reactive power control |
| 3 | d-axis: Constant active power control | Pdc3 = −200 MW; Qac3 = 0 Mvar |
| q-axis: Constant reactive power control |
| 4 | d-axis: Constant voltage control | Udc4 = 500 kV; Qac4 = 0 Mvar |
| q-axis: Constant reactive power control |
Table 4.
Initial state of the generators, loads, and reactive power compensators in the AC systems.
Table 4.
Initial state of the generators, loads, and reactive power compensators in the AC systems.
| | Active Power/MW | Reactive Power/Mvar | Voltage Output/p.u. | Phase Angle/° |
|---|
| GA1 | 762 | 166 | 1.03 | 0 |
| GA2 | 700 | 285 | 1.01 | −17.0 |
| GA3 | 700 | 160 | 1.03 | −12.9 |
| GA4 | 700 | 272 | 1.01 | −25.9 |
| GB1 | 766 | 169 | 1.03 | 0 |
| GB2 | 700 | 292 | 1.01 | −17.3 |
| GB3 | 700 | 154 | 1.03 | 1.8 |
| GB4 | 700 | 260 | 1.01 | −11.5 |
| LA7 | 1100 | 100 | 0.96 | −20.5 |
| CA7 | 0 | 0 | 0.96 | −20.5 |
| LA9 | 1100 | 100 | 0.96 | −29.6 |
| CA9 | 0 | 0 | 0.96 | −29.6 |
| LB7 | 1700 | 100 | 0.96 | −20.7 |
| CB7 | 0 | 0 | 0.96 | −20.7 |
| LB9 | 1700 | 100 | 0.96 | −15.7 |
| CB9 | 0 | 0 | 0.96 | −15.7 |
Table 5.
The activated CBs and activated time under different faults.
Table 5.
The activated CBs and activated time under different faults.
| Fault Location | Activated CBs and Activated Time (After Fault)/ms |
|---|
| B13 line side | B13: 1.6 | B31: 7.6 |
| Midpoint of line 13 | B13: 3.8 | B31: 5.1 |
| B31 line side | B13: 6.3 | B31: 3.3 |
| B12 line side | B12: 2.5 | B21: 3.9 |
| Midpoint of line 12 | B12: 3.6 | B21: 3.5 |
| B21 line side | B12: 3.9 | B21: 2.5 |
| B24 line side | B24: 1.6 | B42: 8.8 |
| Midpoint of line 24 | B24: 4.1 | B42: 6.0 |
| B42 line side | B24: 6.9 | B42: 3.3 |
| B34 line side | B34: 2.3 | B43: 6.7 |
| Midpoint of line 34 | B34: 4.9 | B43: 5.0 |
| B43 line side | B34: 6.8 | B43: 2.5 |
Table 6.
Performance comparison of the two strategies.
Table 6.
Performance comparison of the two strategies.
| Item | Strategy 1 | Strategy 2 |
|---|
| B24 LCS activated time after the fault/ms | 10 ms | 1.6 ms |
| The current level when B24 LCS is activated/kA | 23.4 kA | 6.0 kA |
| The current level when B24 MBs are activated/kA | 19.2 kA | 12.6 kA |
| The overvoltage times when B24 MBs interrupts the fault current | 1.87 | 1.78 |
| B42 LCS activated time after the fault/ms | 10 ms | 8.8 ms |
| The current level when B42 LCS is activated/kA | 5.5 kA | 6.0 kA |
| The current level when B24 MBs are activated/kA | 6.5 kA | 7.1 kA |
| The overvoltage times when B42 MB interrupts the fault current | 1.65 | 1.66 |
| Peak current through MMC 1 smoothing reactor/kA | 7.3 kA | 4.6 kA |
| Peak current through MMC 2 smoothing reactor/kA | 14.3 kA | 6.6 kA |
| Peak current through MMC 3 smoothing reactor/kA | 6.0 kA | 2.1 kA |
| Peak current through MMC 4 smoothing reactor /kA | 7.0 kA | 4.4 kA |
| Peak current through the 6 arms of MMC 1/kA | 4.1 kA | 1.9 kA |
| Peak current through the 6 arms of MMC 2/kA | 7.4 kA | 3.0 kA |
| Peak current through the 6 arms of MMC 3/kA | 2.4 kA | 1.0 kA |
| Peak current through the 6 arms of MMC 4/kA | 4.6 kA | 2.9 kA |
| The DC grid overvoltage times when B24 and B42 MBs interrupt the fault current | 2.33 | 2.11 |
Table 7.
Required device number of the two strategies.
Table 7.
Required device number of the two strategies.
| | Strategy 1 | Strategy 2 |
|---|
| Current breaking ability | 21 kA | 15 kA |
| Main investment | MBs | MBs |
| Required number of CBs | m | m |
| Series index | 226 | 215 |
| Direction index | 2 | 2 |
| Parallel index | 7 | 5 |
| Number of required IGBTs | 3164 m | 2150 m |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}