Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor

Abstract
:
1. Introduction
2. Rotor Kinetic Energy of the Doubly-Fed Induction Generator (DFIG)
2.1. Inertial Support Capacity of Rotor Kinetic Energy
2.2. Conventional Frequency Control Strategy Based on Rotor Kinetic Energy
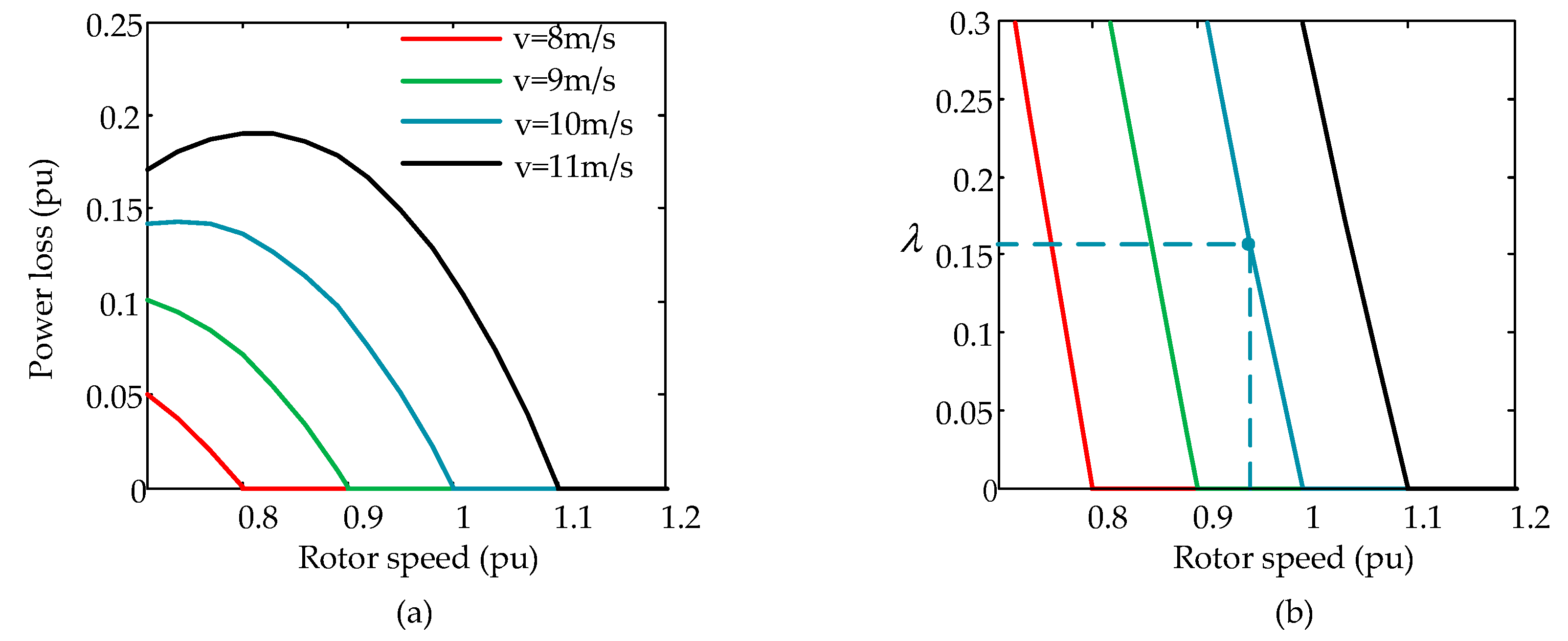
2.3. Power Dip and Power Loss during Rotor Speed Recovery
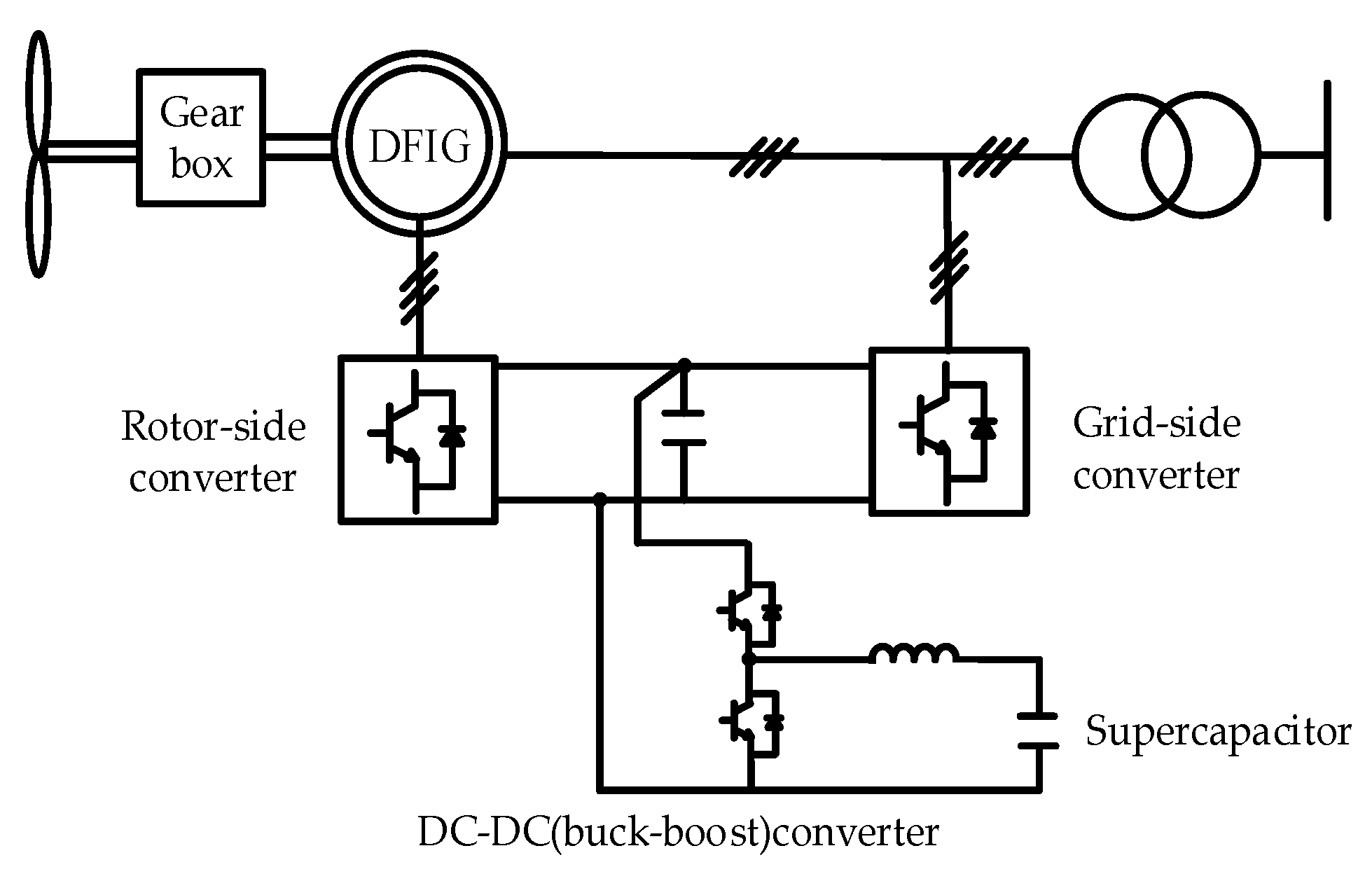
3. Frequency Regulation Scheme Based on Rotor Kinetic Energy and Supercapacitor
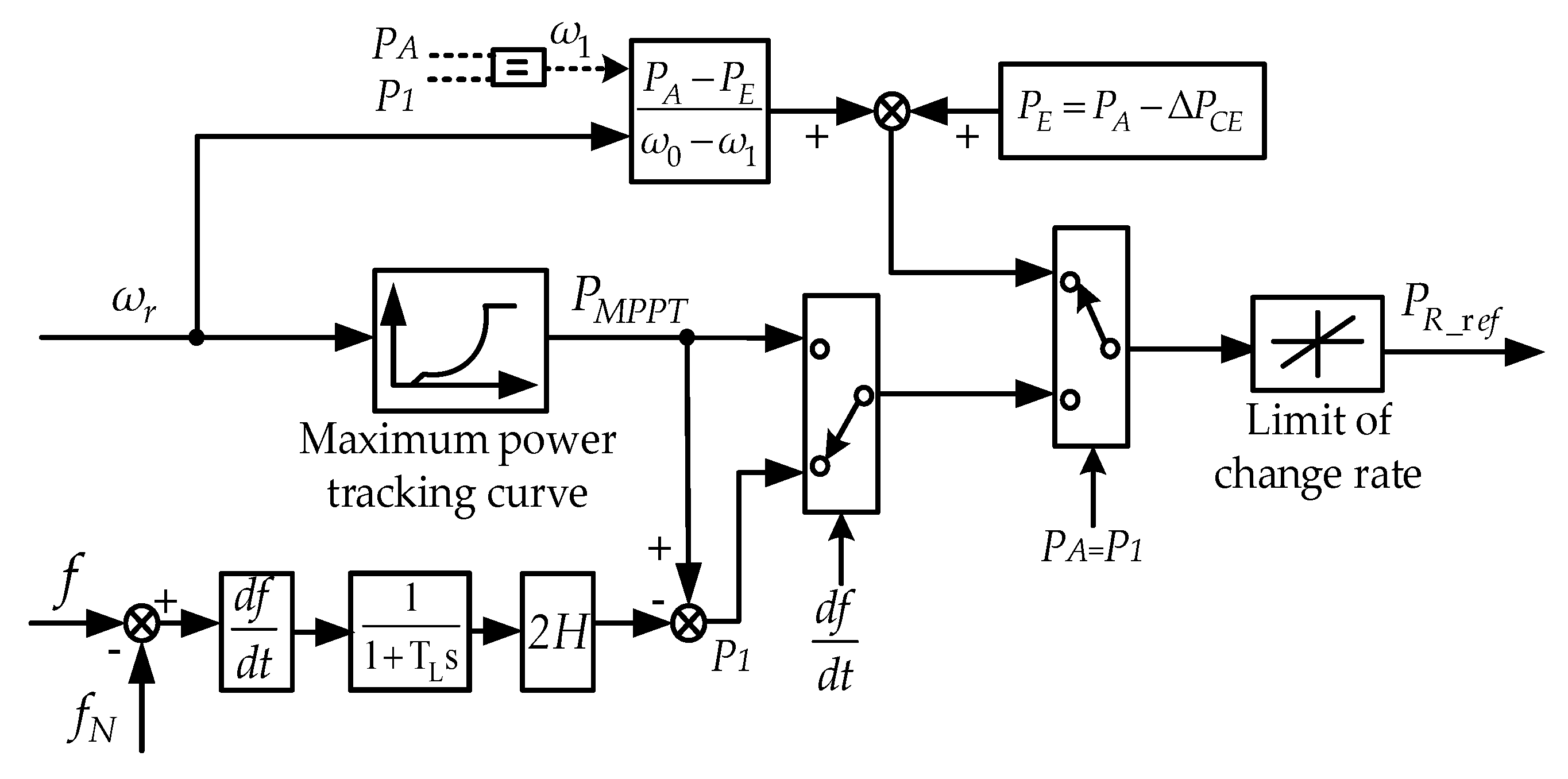
3.1. Rotor Kinetic Energy Control Mode of the DFIG
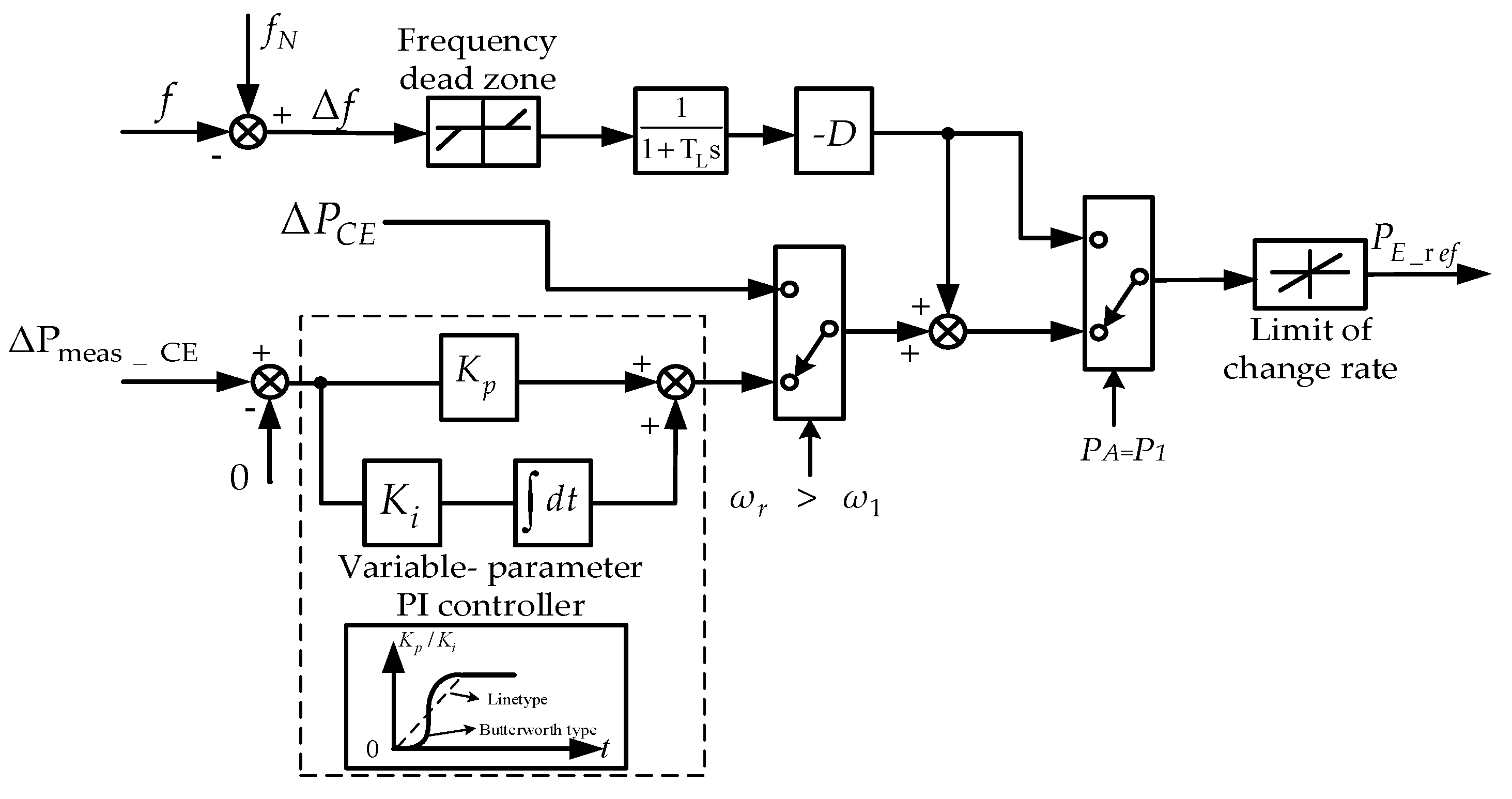
3.2. Supercapacitor Control Mode
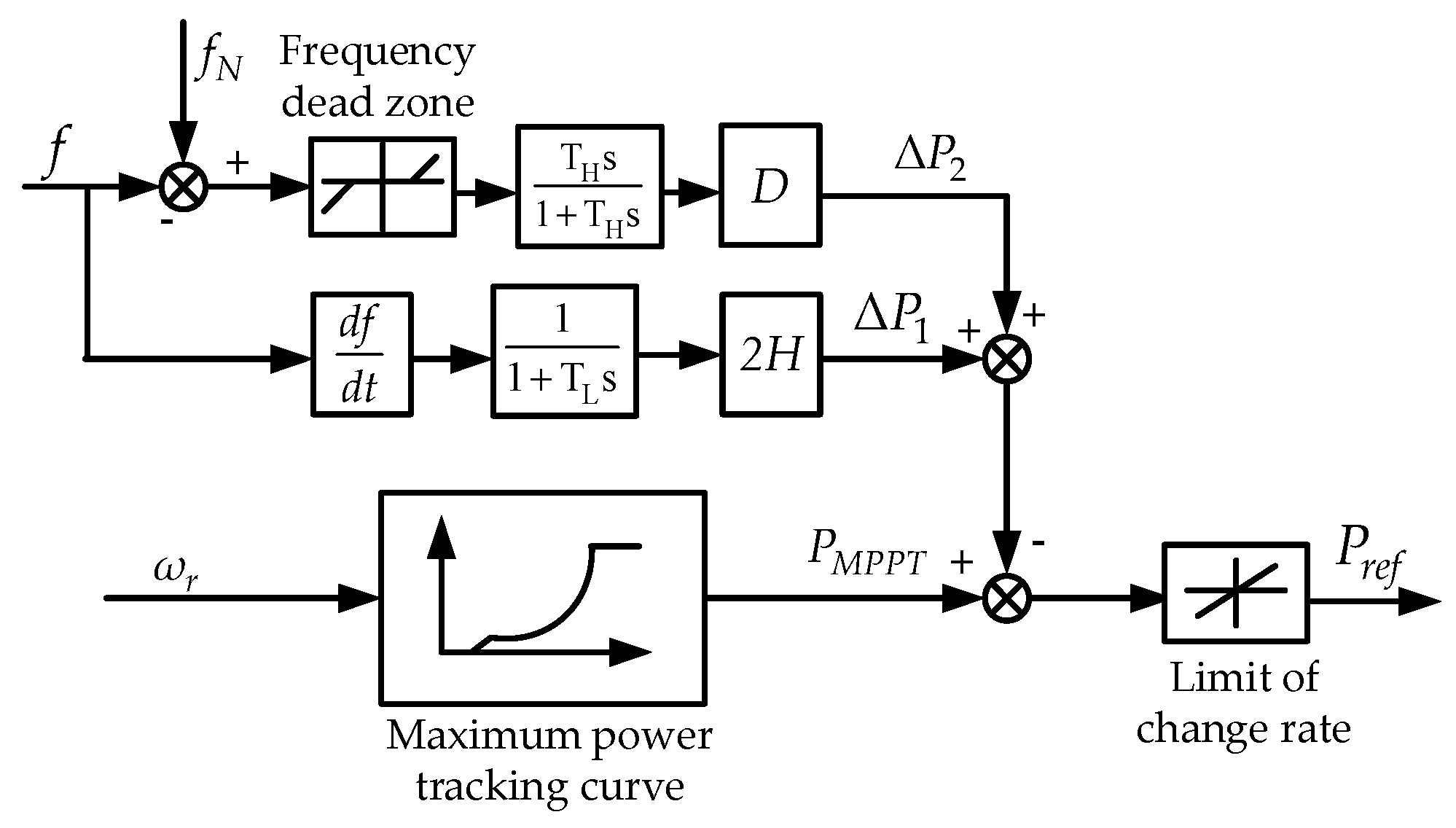
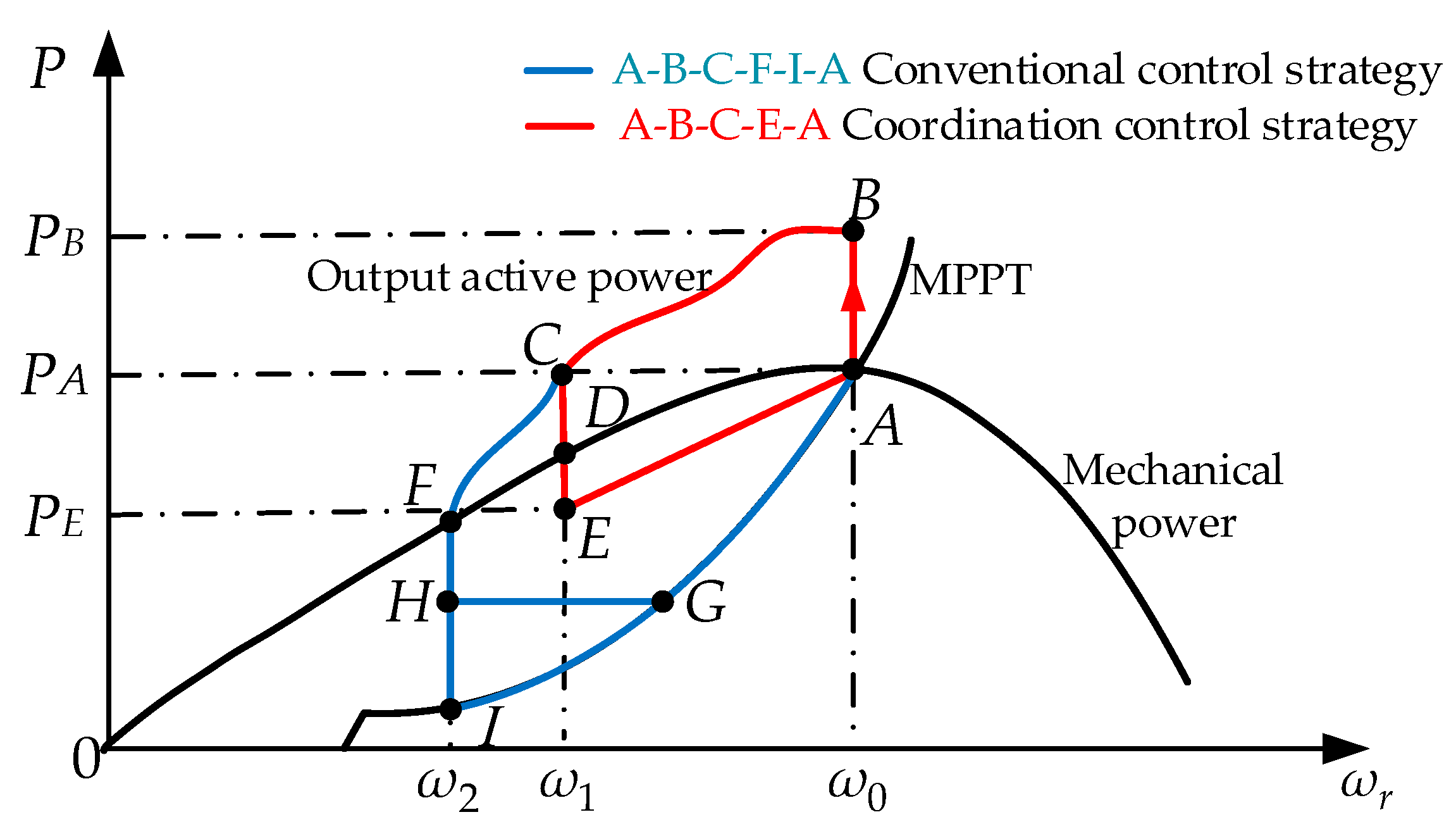
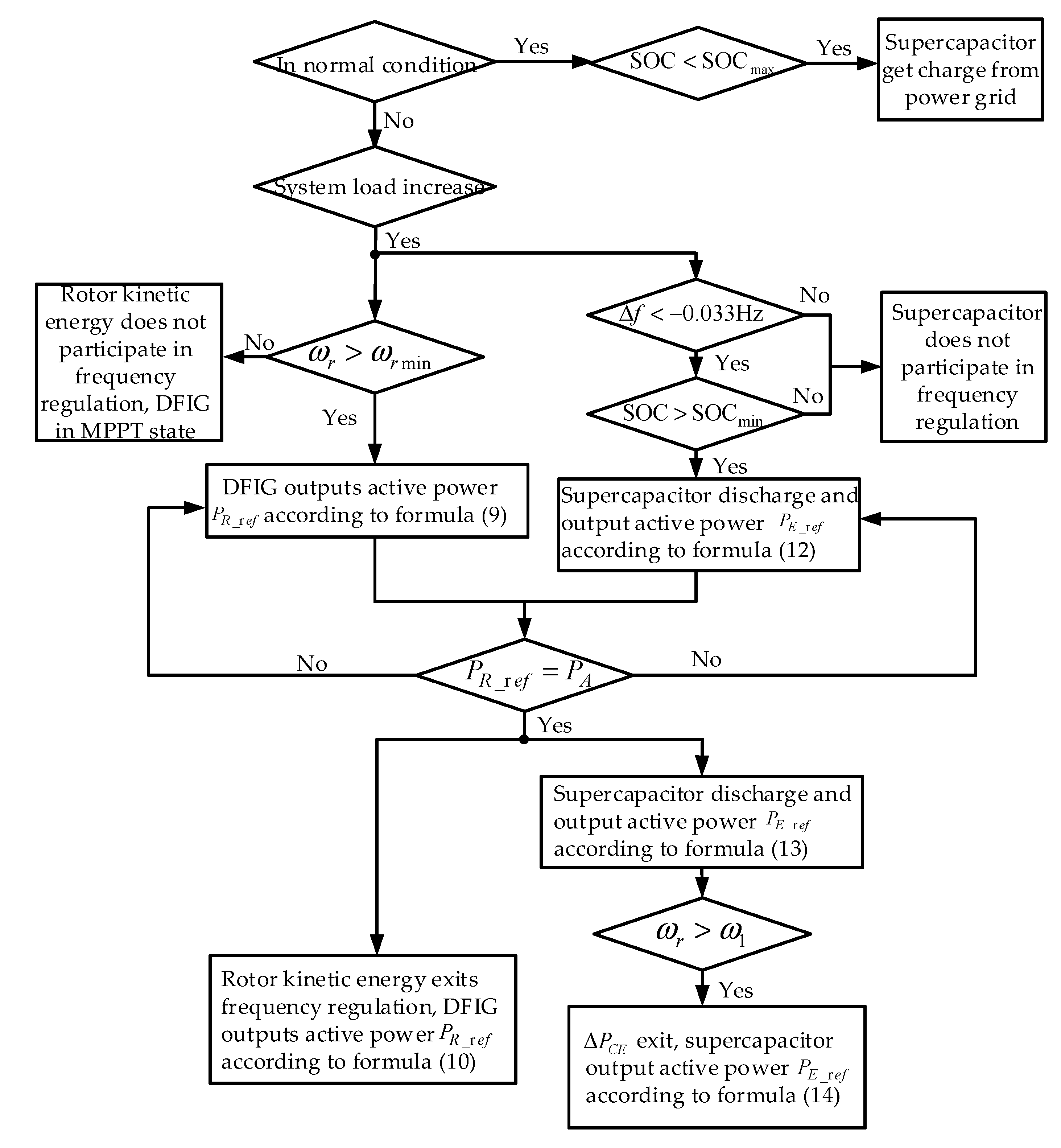
3.3. Control Mode and Flow of Coordinated Frequency Control Strategy for the DFIG and Supercapacitor
4. Simulation Analysis and Research
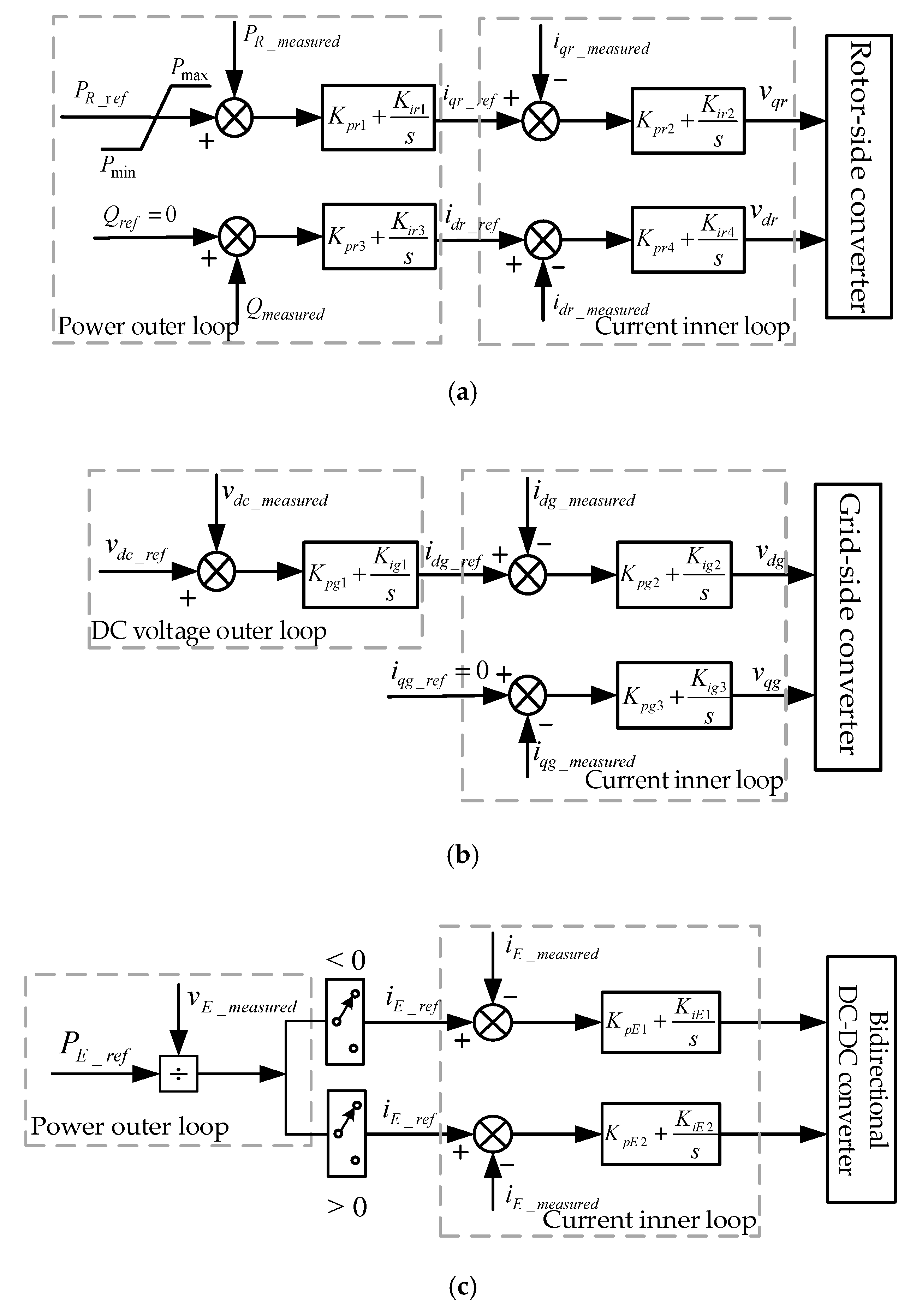
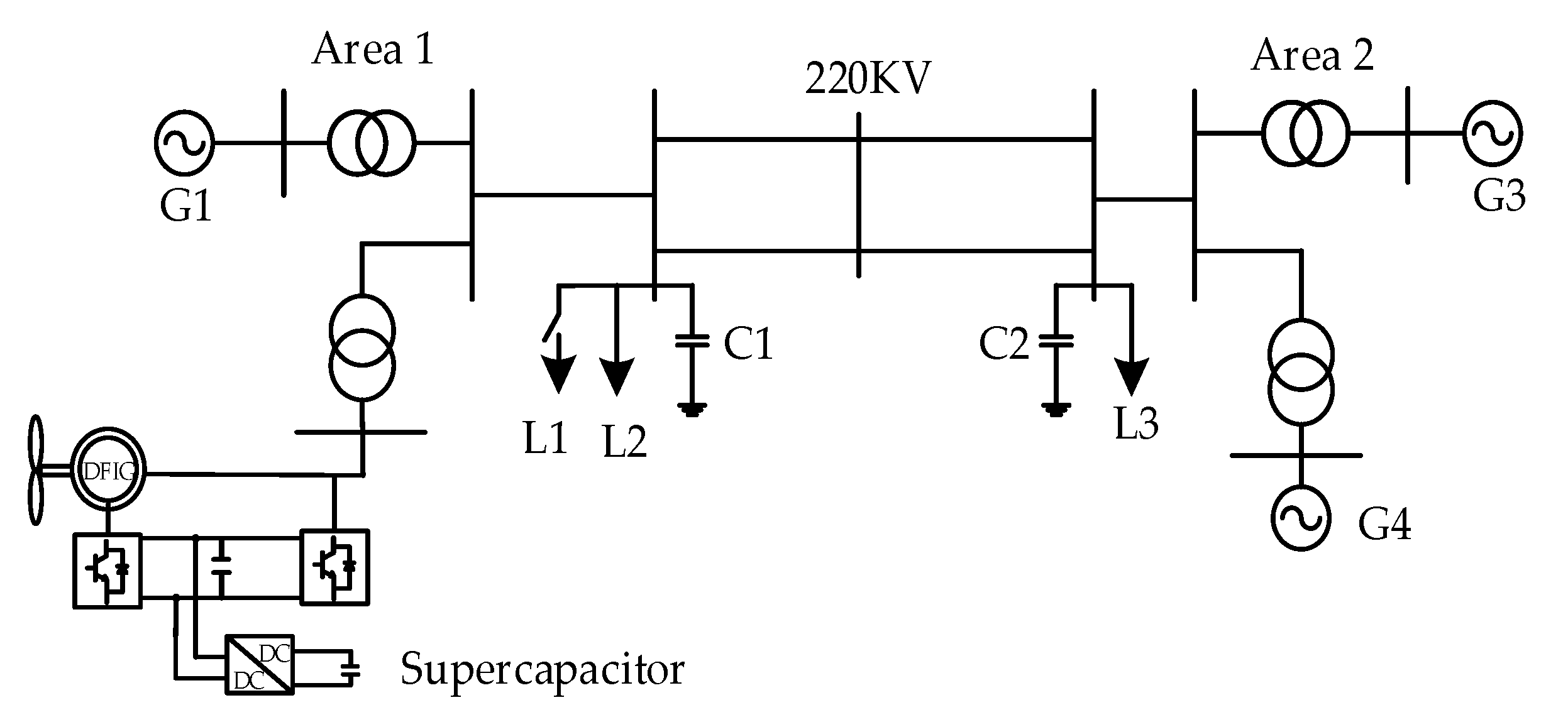
4.1. Simulation Model
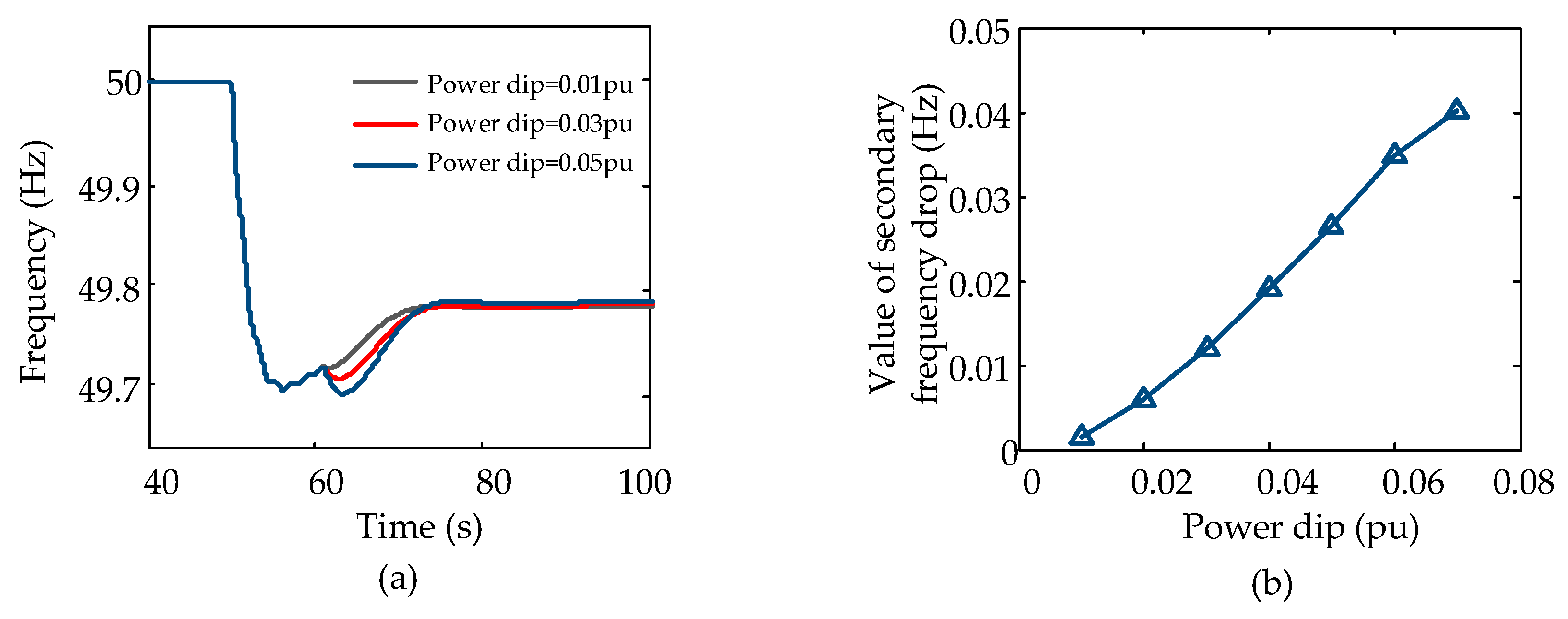
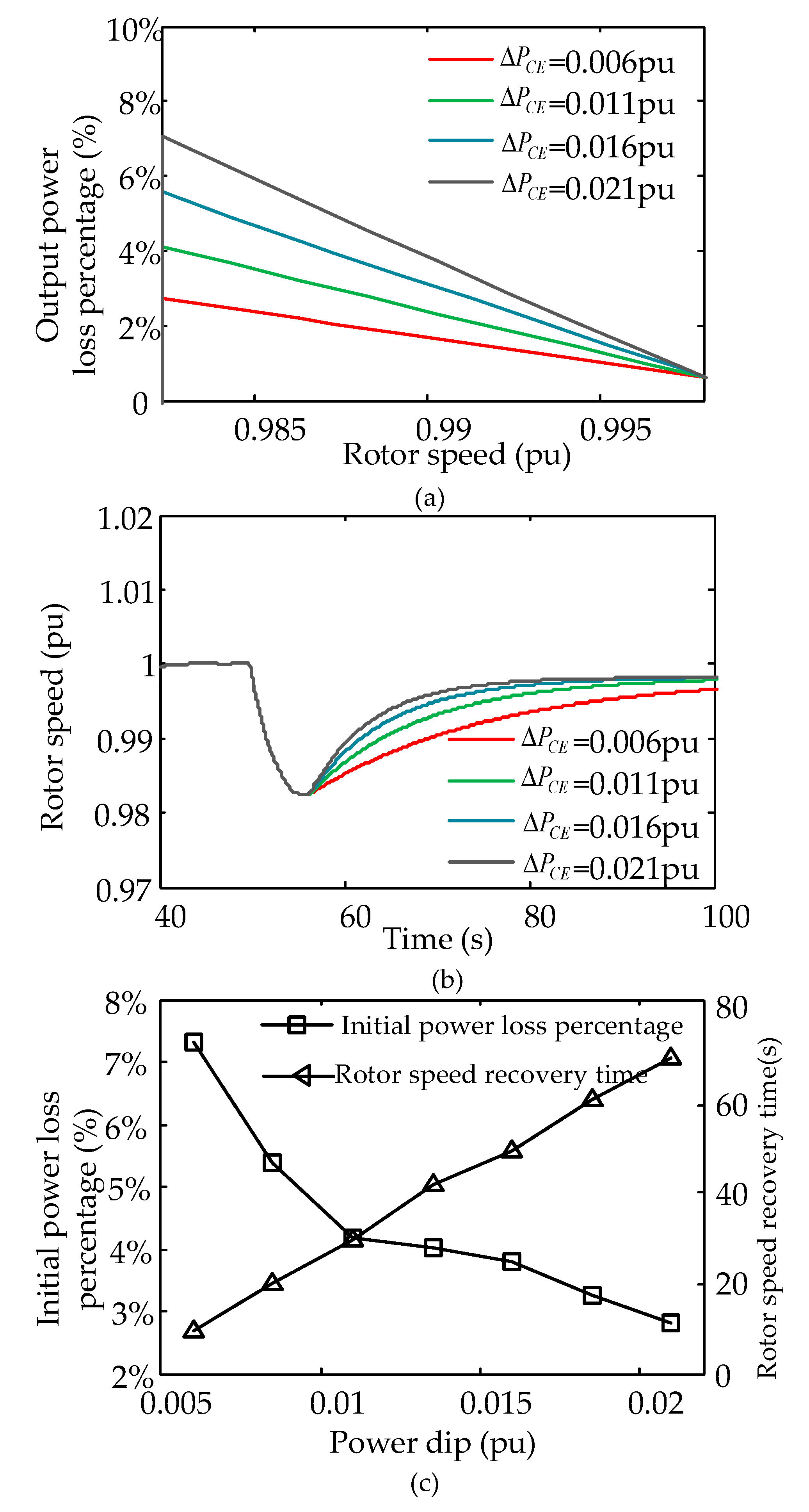
4.2. Selection of Power Dip
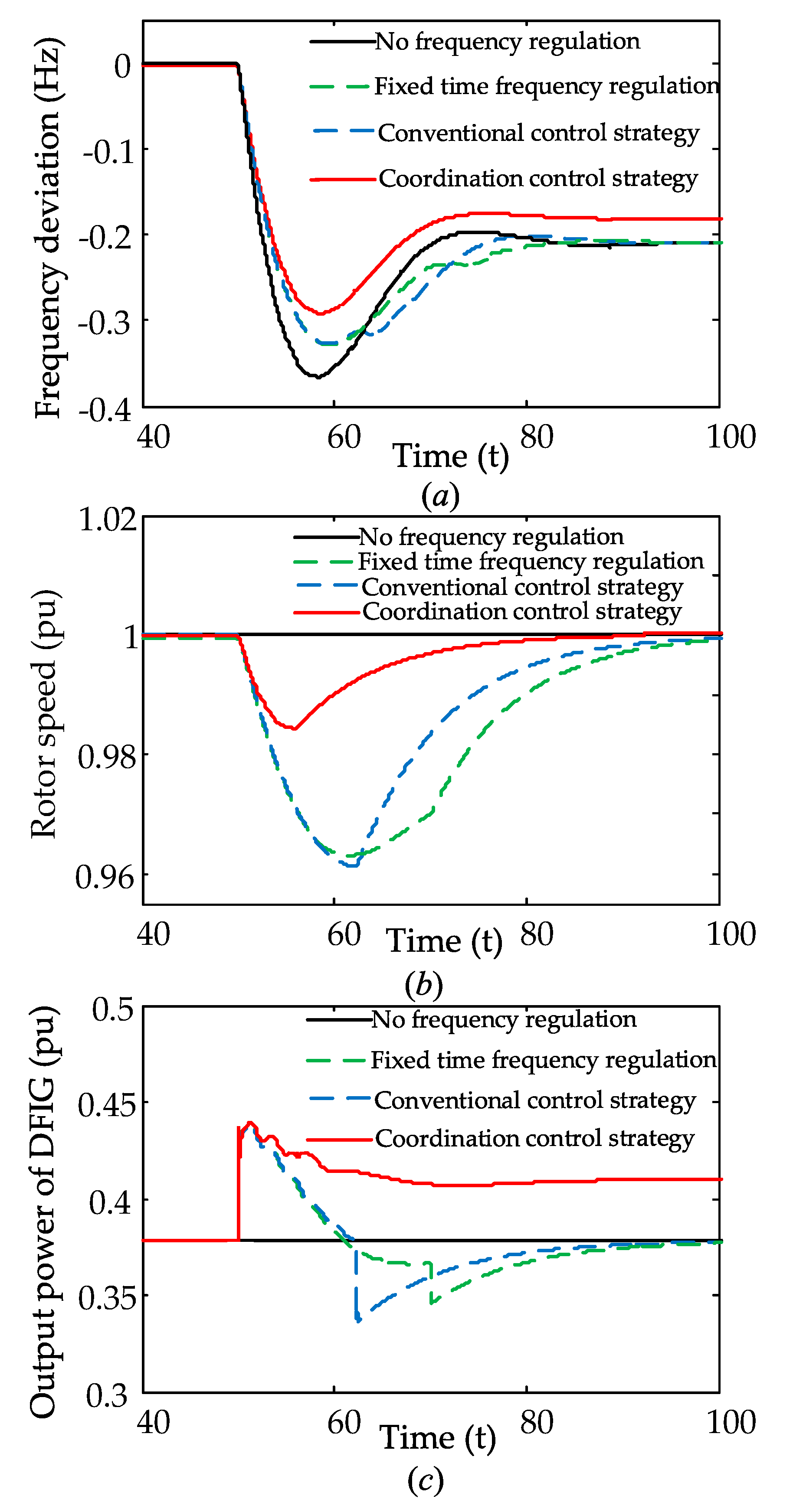
4.3. Analysis of Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Supply | Parameter | Value |
|---|---|---|
| DFIG | Power | 1.5 MW |
| Voltage | 690 V | |
| stator resistance/reactance | 0.00706/0.171 pu | |
| rotor resistance/reactance | 0.005/0.156 pu | |
| magnetizing reactance | 2.9 pu | |
| inertia constant | 5.04 s | |
| number of pole pairs | 3 | |
| nominal DC bus voltage | 1200 V | |
| DC capacitor | 10 mF | |
| frequency | 50 Hz | |
| Synchronous generator | Power | 900 MW |
| Voltage | 20 kV | |
| d-axis synchronous/transient/sub-transient reactance | 1.8 pu/0.3 pu/0.25 pu | |
| q-axis synchronous/transient/sub-transient reactance | 1.7 pu/0.55 pu/0.25 pu | |
| stator resistance | 0.0025 pu | |
| Turbine-governor | high-pressure fraction FH | 0.3 |
| reheat time constant Tr | 8 s | |
| droop | 0.05 | |
| governor time constant Tg | 0.3 s | |
| Supercapacitor | Power | 0.15 MW |
| Energy | 0.0075 MWh | |
| Voltage | 144 V | |
| Capacity | 55 F | |
| Rotor-side converter | power outer loop: Kpr1 = Kpr3 | 1 |
| power outer loop: Kir1 = Kir3 | 5 | |
| power outer loop: H | 10.08 | |
| current inner loop: Kpr2 = Kpr4 | 0.3 | |
| current inner loop: Kir2 = Kir4 | 8 | |
| Grid-side converter | voltage outer loop: Kpg1 | 0.002 |
| voltage outer loop: Kig1 | 0.05 | |
| current inner loop: Kpg2 = Kpg3 | 1 | |
| current inner loop: Kig2 = Kig3 | 100 | |
| Bidirectional DC-DC converter | power outer loop: D | 10 |
| current inner loop: KpE1 = KpE2 | 1.5 | |
| current inner loop: KiE1 = KiE2 | 1 | |
| Filter | low-pass filter TL | 0.1 |
| high-pass filter TH | 10 |
References
- Liu, B.; Hu, Y.; Su, W.; Li, G.; Wang, H.; Li, Z. Stability Analysis of DFIG Wind Turbine Connected to Weak Grid based on Impedance Modeling. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Cai, S.; Wen, H. Modeling and MPPT control of DFIG wind energy system. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015; pp. 1–6. [Google Scholar]
- Geng, H.; Xi, X.; Yang, G. Small-signal stability of power system integrated with ancillary-controlled large-scale DFIG-based wind farm. IET Renew. Power Gener. 2017, 11, 1191–1198. [Google Scholar] [CrossRef]
- Nordel. Nordic Grid Code 2007 (Nordic Collection of Rules) [DB/EB]. 2004. Available online: http://webhotel2.tut.fi/units/set/research/adine/materiaalit/Active%20network/System%20integration/GriG%20codes/Nordel%20grid%20code%202007-00129-01-E.pdf (accessed on 12 April 2020).
- Eskom System Operations and Planning Division. Grid code requirements for wind energy facilities connected to distribution or transmission system in south Africa (version 4.4) [DB/EB]. 2012-07. Available online: http://www.nersa.org.za/Admin/Document/Editor/file/Electricity/TechnicalStandards/RSA%20Grid%20Code%20Connection%20Requirements%20for%20Wind%20Energy%20Facilitie.pdf (accessed on 12 April 2020).
- National Electric Power Regulatory Standardization Technical Committee. GB/T 19963-2011 Technical Rule for Connecting Wind Farm to Power System[S]; China Standards Press: Beijing, China, 2011. [Google Scholar]
- Krpan, M.; Kuzle, I. Dynamic characteristics of virtual inertial response provision by DFIG-based wind turbines. Electr. Power Syst. Res. 2020, 178, 106005. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhende, C.N.; Samanta, A.K. Adaptive virtual inertia-based frequency regulation in wind power systems. Renew. Energy 2018, 115, 558–574. [Google Scholar] [CrossRef]
- Lee, J.; Muljadi, E.; Srensen, P.; Kang, Y.C. Releasable kinetic energy-based inertial control of a DFIG wind power plant. IEEE Trans. Sustain. Energy 2016, 7, 279–288. [Google Scholar] [CrossRef]
- Chen, W.; Wang, J.; Gao, W.; Gao, D.W.; Wang, B.; Wang, H. Power optimization control of doubly fed induction generator based on active power reserve. In Proceedings of the 2016 North American Power Symposium (NAPS), Denver, CO, USA, 18–20 September 2016; pp. 1–6. [Google Scholar]
- Chau, T.K.; Yu, S.S.; Fernando, T.L.; Iu, H.H.; Small, M.A. Novel control strategy of DFIG wind turbines in complex power systems for enhancement of primary frequency response and LFOD. IEEE Trans. Power Syst. 2018, 33, 1811–1823. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Arani, M.F.M.; El-Saadany, E.F. Implementing virtual inertia in DFIG-based wind power generation. IEEE Trans. Power Syst. 2013, 28, 1373–1384. [Google Scholar] [CrossRef]
- Qu, L.; Qiao, W. Constant power control of DFIG wind turbines with supercapacitor energy storage. IEEE Trans. Ind. Appl. 2011, 47, 359–367. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Yao, W.; Wen, J.Y. A wind farm virtual inertia compensation strategy based on energy storage system. Proc. CSEE 2015, 35, 1596–1605. [Google Scholar]
- Mamen, A.; Supatti, U. A survey of hybrid energy storage systems applied for intermittent renewable energy systems. In Proceedings of the 2017 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 27–30 June 2017; pp. 729–732. [Google Scholar]
- Jiang, Q.Y.; Gong, Y.Z. Review of wind power integration control with energy storage technology. Power Syst. Technol. 2015, 39, 360–3368. [Google Scholar]
- Krpan, M.; Kuzle, I. Coordinated Control of an Ultracapacitor Bank and a Variable-Speed Wind Turbine Generator for Inertial Response Provision During Low and Above Rated Wind Speeds. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference: Grid Modernization for Energy Revolution, Beijing, China, 21–23 November 2019; pp. 1693–1698. [Google Scholar]
- Sun, D.; Sun, L.; Wu, F.; Zhang, L.; Geng, W.; Peng, J.; Liu, F. Research on frequency inertia response control strategy of SCESS-DFIG system considering variable wind speed. J. Eng. 2019, 2995–3001. [Google Scholar] [CrossRef]
- Xiong, L.; Li, Y.; Zhu, Y.; Yang, P.; Xu, Z. Coordinated control schemes of super-capacitor and kinetic energy of DFIG for system frequency support. Energies 2018, 11, 103. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Muljadi, E.; Gevorgian, V.; Hoke, A.F. Dynamic capabilities of an energy storage-embedded DFIG system. IEEE Trans. Ind. Appl. 2019, 55, 4124–4134. [Google Scholar] [CrossRef]
- Miao, L.; Wen, J.Y.; Xie, H.L. Coordinated control strategy of wind turbine generator and energy storage equipment for frequency support. IEEE Trans. Ind. Appl. 2015, 54, 2732–2742. [Google Scholar] [CrossRef]
- Zhao, J.J.; Li, M.; He, X.Q. Coordinated control strategy of wind power and energy storage in frequency regulation based on torque limit control. Trans. China Electrotech. Soc. 2019, 34, 4982–4990. [Google Scholar]
- Yuan, T.J.; Wang, J.J.; Guan, Y.H.; Liu, Z.; Song, X.; Che, Y.; Cao, W. Virtual inertia adaptive control of a Doubly Fed Induction Generator (DFIG) Wind Power System with Hydrogen Energy Storage. Energies 2018, 11, 904. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Jang, W.; Overbye, T. Commitment of fast-responding storage devices to mimic inertia for the enhancement of primary frequency response. IEEE Trans. Power Syst. 2018, 33, 1219–1230. [Google Scholar] [CrossRef]
- Yan, X.W.; Song, Z.J.; Cui, S. Primary frequency regulation strategy of doubly-fed wind turbine based on variable power point tracking and supercapacitor energy storage. Trans. China Electrotech. Soc. 2020, 35, 530–541. [Google Scholar]
- Xie, D.; Feng, J.Q. Small-signal modelling and modal analysis of DFIG-based wind turbine based on three-mass shaft model. Proc. CSEE 2013, 33, 21–29. [Google Scholar]
- Liu, B.B.; Yang, J.W.; Liao, K. Improved frequency control strategy for DFIG-based wind turbine based on rotor kinetic energy control. Autom. Electr. Power Syst. 2016, 40, 17–22. [Google Scholar]
- Chen, Y.H.; Wang, G.; Shi, Q.M. A new coordinated virtual inertia control strategy for wind farms. Autom. Electr. Power Syst. 2015, 39, 27–33. [Google Scholar]
- Liu, H.; Ge, J.; Gong, Y. Wind farm participation in grid primary frequency optimization scheme selection and wind storage coordination control strategy research. Glob. Energy Internet 2019, 2, 44–52. [Google Scholar]
- Kulsangcharoen, P.; Klumpner, C.; Rashed, M.; Asher, G. A new duty cycle based efficiency estimation method for a supercapacitor stack under constant power operation. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010; pp. 1–6. [Google Scholar]
- Yang, H. Supercapacitor energy delivery capability during a constant power discharge process. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 1958–1963. [Google Scholar]
- Du, Y.; Zhang, A.; Zhang, Y. The design and implementation of supercapacitor charging device and monitor system for electrical trams. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 5893–5897. [Google Scholar]
- Tahtawi, A.R.A.; Rohman, A.S. Simple supercapacitor charging scheme in electrical car simulator by using direct current machines. In Proceedings of the 2015 International Conference on Electrical Engineering and Informatics (ICEEI), Denpasar, Indonesia, 10–11 August 2015; pp. 562–567. [Google Scholar]
- Lawu, B.L.; Fuada, S.; Ramadhan, S.; Sabana, A.F.; Sasongko, A. Charging supercapacitor mechanism based-on bidirectional DC-DC converter for electric ATV motor application. In Proceedings of the 2017 International Symposium on Electronics and Smart Devices (ISESD), Yogyakarta, Indonesia, 17–19 October 2017; pp. 129–132. [Google Scholar]
- Boubzizi, S.; Abid, H.; Ahmed, E.H.; Mohamed, C. Comparative study of three types of controllers for DFIG in wind energy conversion system. Protect. Control Mod. Power Syst. 2018, 3, 214–225. [Google Scholar] [CrossRef]
- Tummala, S.; Ayyarao, L.V. Modified vector controlled DFIG wind energy system based on barrier function adaptive sliding mode control. Protect. Control Mod. Power Syst. 2019, 4, 34–41. [Google Scholar]
- Yan, X.; Song, Z.; Xu, Y.; Sun, Y.; Wang, Z.; Sun, X. Study of Inertia and Damping Characteristics of Doubly Fed Induction Generators and Improved Additional Frequency Control Strategy. Energies 2018, 12, 1. [Google Scholar] [CrossRef] [Green Version]
| Rotor Speed | Rotor Kinetic Energy(MJ) | Power Support Time Under 10% Rated Power(s) |
|---|---|---|
| 1800 (1.2 pu) | 9.97 | 8.79 s |
| 1500 (1 pu) | 5.35 | 8.36 s |
| 1350 (0.9 pu) | 3.36 | 7 s |
| 1200 (0.8 pu) | 1.57 | 6.02 s |
| Wind Speed (m/s) | Rotor Speed Recovery Time (s) | Initial Power Loss Percentage (%) | |
|---|---|---|---|
| 8 | 0.016–0.019 | 32–26 | 7.1–9 |
| 9 | 0.012–0.0167 | 31–25 | 5.3–6.95 |
| 10 | 0.011–0.016 | 27–21.5 | 4.1–5.5 |
| 11 | 0.010–0.015 | 32–26 | 2.2–3.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Sun, X. Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor. Energies 2020, 13, 3697. https://doi.org/10.3390/en13143697
Yan X, Sun X. Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor. Energies. 2020; 13(14):3697. https://doi.org/10.3390/en13143697
Chicago/Turabian StyleYan, Xiangwu, and Xuewei Sun. 2020. "Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor" Energies 13, no. 14: 3697. https://doi.org/10.3390/en13143697
APA StyleYan, X., & Sun, X. (2020). Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor. Energies, 13(14), 3697. https://doi.org/10.3390/en13143697