Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions

 ,
,  ,
,  ,
, 
 , , ,
, , ,  ,
,  , and
, and
Abstract

1. Introduction
- Deformation accuracy (dd)—enabling one to identify the place and extent of rail track deformations, for which the maximum horizontal position error was adopted as not exceeding 1 cm;
- Stocktaking accuracy (di)—applied in rapid stocktaking of existing rail tracks, for which the maximum horizontal position error was adopted as not exceeding 3 cm;
- Design accuracy (dp)—applied in design and construction work, for which the maximum horizontal position error was adopted as not exceeding 10 cm.
2. Materials and Methods
2.1. Mobile Satellite Measurements
- Positioning with the use of RTK GPS correction data;
- Positioning with the use of RTK GPS/GLONASS correction data;
- Positioning with the use of RTK GPS/GLONASS/Galileo correction data.
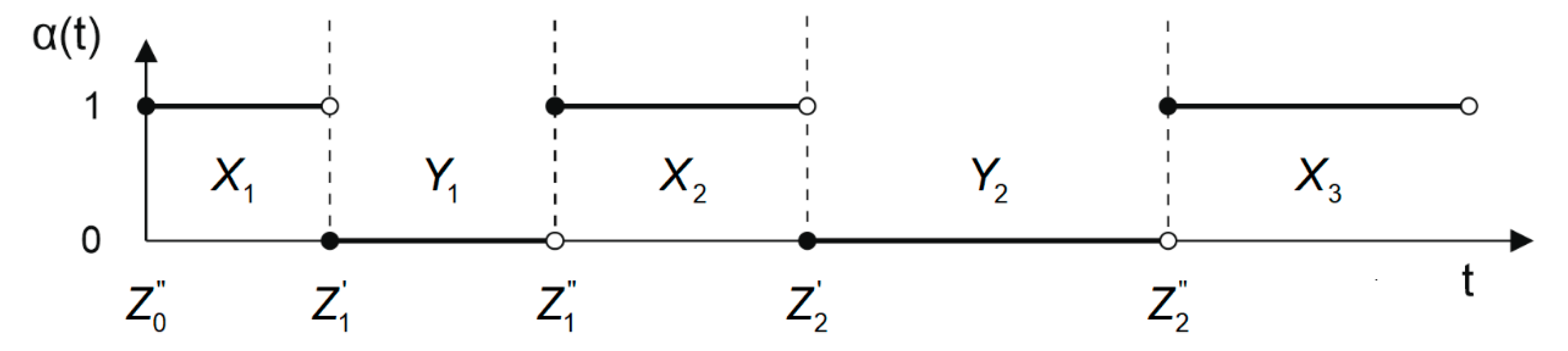
2.2. Mathematical Model
- —life time probability density function;
- —failure time probability density function;
- —failure rate;
- —renewal rate.
3. Results
- GPS—No availability for the 1-cm threshold. Low availability for the 3-cm level (38.72%) and high availability for the 10-cm level (94.24%);
- GPS/GLONASS—No availability for the 1-cm threshold. Medium availability for the 3-cm level (79.04%) and high availability for the 10-cm level (98.52%);
- GPS/GLONASS/Galileo—No availability for the 1-cm threshold. Medium availability for the 3 cm level (78.89%) and high availability for the 10-cm level (97.43%);
- A considerable increase in availability when two- (GPS/GLONASS) and three-system (GPS/GLONASS/Galileo) solutions are applied, compared to the GPS solution for the 3-cm level;
- Absence of a significant increase in availability when two- (GPS/GLONASS) or three-system (GPS/GLONASS/Galileo) solutions are applied.
- GPS—No availability for the 1-cm threshold. Medium availability for the 3-cm level (80.27%) and high availability for the 10-cm level (95.91%);
- GPS/GLONASS—Low availability for the 1-cm threshold. High availability for the 3-cm level (89.03%) and the 10-cm level (99.19%);
- GPS/GLONASS/Galileo—Low availability for the 1-cm threshold. High availability for the 3-cm level (91.52%) and the 10-cm level (98.63%);
- A considerable increase in availability when two- (GPS/GLONASS) and three-system (GPS/GLONASS/Galileo) solutions are applied compared to the GPS solution for the 1-cm level;
- Absence of a significant increase in availability when two- (GPS/GLONASS) or three-system (GPS/GLONASS/Galileo) solutions are applied.
- GPS—No availability for the 1-cm threshold. Low availability for the 3-cm level (17.55%) and high availability for the 10-cm level (92.83%);
- GPS/GLONASS—No availability for the 1-cm threshold. Medium availability for the 3-cm level (64.65%) and high availability for the 10-cm level (98.12%);
- GPS/GLONASS/Galileo—No availability for the 1-cm threshold. Medium availability for the 3-cm level (70.69%) and high availability for the 10-cm level (96.48%);
- A considerable increase in availability when two- (GPS/GLONASS) and three-system (GPS/GLONASS/Galileo) solutions are applied compared to the GPS solution for the 3-cm level;
- Absence of a significant increase in availability when two- (GPS/GLONASS) or three-system (GPS/GLONASS/Galileo) solutions are applied.
4. Discussion
- 3D analysis—application of a two- or three-system GNSS solution considerably increases the positioning availability for the 3-cm threshold compared to the GPS solution, by 47.1% for GPS/GLONASS and 53.14% for GPS/GLONASS/Galileo;
- 2D analysis—two- or three-system GNSS solutions considerably increase the positioning availability for the 1-cm threshold, by 19.61% for GPS/GLONASS and 35.56% for GPS/GLONASS/Galileo. Moreover, the application of the GPS/GLONASS/Galileo solution considerably increases (by 15.95%) the positioning availability for the 1-cm threshold, compared to the GPS/GLONASS solution;
- 1D analysis—it is worth using multi-GNSS receivers in height measurements, because the positioning availability for the 3-cm threshold considerably increased compared to the GPS solution. A two- and three-system GNSS solution considerably increases the positioning accuracy, compared to the GPS solution, by approximately 40%;
- Absence of a significant increase in availability when two- (GPS/GLONASS) or three-system (GPS/GLONASS/Galileo) solutions are applied for 3D, 2D and 1D positioning.
5. Conclusions
- Using more satellites will enhance the statistical reliability of the system. This means that the multi-GNSS solution is more likely (in terms of probability) to identify a measurement blunder of a certain magnitude than is a single-GNSS solution [44];
- It improves the Time to First Fix (TTFF), a measure of the time needed for a GNSS receiver to determine its location [46].
Author Contributions
Funding
Conflicts of Interest
References
- ACIL Allen Consulting. Precise Positioning Services in the Rail Sector. Available online: http://www.ignss.org/LinkClick.aspx?fileticket=rpl6BIao%2F54%3D&tabid=56 (accessed on 30 June 2020).
- Barbu, G.; Marais, J. The SATLOC Project. In Proceedings of the Transport Research Arena 2014 (TRA2014), Paris, France, 14–17 April 2014. [Google Scholar]
- Junting, L.; Jianwu, D.; Yongzhi, M. NGCTCS: Next-generation Chinese Train Control System. J. Eng. Sci. Technol. Rev. 2016, 9, 122–130. [Google Scholar] [CrossRef]
- Ning, B.; Tang, T.; Qiu, K.; Gao, C.; Wang, Q. CTCS—Chinese Train Control System. Adv. Train Control Syst. 2010, 46. [Google Scholar] [CrossRef]
- Albanese, A.; Marradi, L.; Campa, L.; Orsola, B. The RUNE Project: Navigation Performance of GNSS-based Railway User Navigation Equipment. In Proceedings of the 2nd ESA Workshop on Satellite Navigation User Equipment Technologies (NAVITEC 2004), Noordwijk, The Netherlands, 8–10 December 2004. [Google Scholar]
- Betts, K.M.; Mitchell, T.J.; Reed, D.L.; Sloat, S.; Stranghoener, D.P.; Wetherbee, J.D. Development and Operational Testing of a Sub-meter Positive Train Location System. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium (PLANS 2014), Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Marais, J.; Beugin, J.; Berbineau, M. A Survey of GNSS-based Research and Developments for the European Railway Signaling. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2602–2618. [Google Scholar] [CrossRef]
- Specht, C.; Smolarek, L.; Pawelski, J.; Specht, M.; Dąbrowski, P. Polish DGPS System: 1995–2017—Study of Positioning Accuracy. Pol. Marit. Res. 2019, 26, 15–21. [Google Scholar] [CrossRef]
- Krasuski, K.; Ćwiklak, J.; Jafernik, H. Aircraft Positioning Using PPP Method in GLONASS System. Aircr. Eng. Aerosp. Technol. 2018, 90, 1413–1420. [Google Scholar] [CrossRef]
- Specht, C.; Koc, W.; Chrostowski, P.; Szmagliński, J. Accuracy Assessment of Mobile Satellite Measurements in Relation to the Geometrical Layout of Rail Tracks. Metrol. Meas. Syst. 2019, 26, 309–321. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative Analysis of Positioning Accuracy of Samsung Galaxy Smartphones in Stationary Measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef]
- Chrzan, M.; Jackowski, S. Modern Navigation Systems in Rail Transport; Kazimierz Pułaski University of Technology and Humanities in Radom Publishing House: Radom, Poland, 2016. (In Polish) [Google Scholar]
- Koc, W.; Specht, C.; Chrostowski, P.; Szmagliński, J. Analysis of the Possibilities in Railways Shape Assessing Using GNSS Mobile Measurements. MATEC Web Conf. 2019, 262, 11004. [Google Scholar] [CrossRef]
- Specht, C.; Koc, W. Mobile Satellite Measurements in Designing and Exploitation of Rail Roads. Transp. Res. Procedia 2016, 14, 625–634. [Google Scholar] [CrossRef][Green Version]
- Koc, W.; Specht, C. Results of Satellite Measurements of Railway Track. TTS Rail Transp. Tech. 2009, 7, 58–64. (In Polish) [Google Scholar]
- Koc, W.; Specht, C.; Jurkowska, A.; Chrostowski, P.; Nowak, A.; Lewiński, L.; Bornowski, M. Determining the Course of the Railway Route by Means of Satellite Measurements. In Proceedings of the 2nd Scientific-Technical Conference, Design, Construction and Maintenance of Infrastructure in Rail Transport (INFRASZYN 2009), Zakopane, Poland, 22–24 April 2009. (In Polish). [Google Scholar]
- Baran, L.W.; Oszczak, S.; Śledziński, J.; Specht, C. Multifunctional Precise Satellite Positioning System ASG-EUPOS. Available online: http://www.asgeupos.pl/webpg/graph/dwnld/ASG-EUPOS_broszura_200806.pdf (accessed on 30 June 2020). (In Polish).
- Specht, C.; Mania, M.; Skóra, M.; Specht, M. Accuracy of the GPS Positioning System in the Context of Increasing the Number of Satellites in the Constellation. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Dąbrowski, P. Comparative Analysis of Active Geodetic Networks in Poland. In Proceedings of the 17th International Multidisciplinary Scientific GeoConference (SGEM 2017), Albena, Bulgaria, 27 June–6 July 2017. [Google Scholar] [CrossRef]
- Specht, C.; Koc, W.; Chrostowski, P. Computer-aided Evaluation of the Railway Track Geometry on the Basis of Satellite Measurements. Open Eng. 2016, 6, 125–134. [Google Scholar] [CrossRef]
- Specht, C.; Koc, W.; Smolarek, L.; Grządziela, A.; Szmagliński, J.; Specht, M. Diagnostics of the Tram Track Shape with the Use of the Global Positioning Satellite Systems (GPS/GLONASS) Measurements with a 20 Hz Frequency Sampling. J. Vibroeng. 2014, 16, 3076–3085. [Google Scholar]
- Koc, W. Design of Rail-track Geometric Systems by Satellite Measurement. J. Transp. Eng. 2012, 138, 114–122. [Google Scholar] [CrossRef]
- Koc, W. The Analytical Design Method of Railway Route’s Main Directions Intersection Area. Open Eng. 2016, 6, 1–9. [Google Scholar] [CrossRef]
- Koc, W.; Chrostowski, P. Computer-aided Design of Railroad Horizontal Arc Areas in Adapting to Satellite Measurements. J. Transp. Eng. 2014, 140. [Google Scholar] [CrossRef]
- Gikas, V.; Daskalakis, S. Determining Rail Track Axis Geometry Using Satellite and Terrestrial Geodetic Data. Surv. Rev. 2008, 40, 392–405. [Google Scholar] [CrossRef]
- Chen, Q.; Niu, X.; Zhang, Q.; Cheng, Y. Railway Track Irregularity Measuring by GNSS/INS Integration. Annu. Navig. 2015, 62, 83–93. [Google Scholar] [CrossRef]
- Chen, Q.; Niu, X.; Zuo, L.; Zhang, T.; Xiao, F.; Liu, Y.; Liu, J. A Railway Track Geometry Measuring Trolley System Based on Aided INS. Sensors 2018, 18, 538. [Google Scholar] [CrossRef]
- Akpinar, B.; Gulal, E. Multisensor Railway Track Geometry Surveying System. IEEE Trans. Instrum. Meas. 2012, 61, 190–197. [Google Scholar] [CrossRef]
- Gao, Z.; Ge, M.; Li, Y.; Shen, W.; Zhang, H.; Schuh, H. Railway Irregularity Measuring Using Rauch–Tung–Striebel Smoothed Multi-sensors Fusion System: Quad-GNSS PPP, IMU, Odometer, and Track Gauge. GPS Solut. 2018, 22, 1–14. [Google Scholar] [CrossRef]
- Kurhan, M.B.; Kurhan, D.M.; Baidak, S.Y.; Khmelevska, N.P. Research of Railway Track Parameters in the Plan Based on the Different Methods of Survey. Nauka Prog. Transp. 2018, 2, 77–86. [Google Scholar] [CrossRef]
- Li, Q.; Chen, Z.; Hu, Q.; Zhang, L. Laser-aided INS and Odometer Navigation System for Subway Track Irregularity Measurement. J. Surv. Eng. 2017, 143, 04017014. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Q.; Niu, Q. Kinematic Measurement of the Railway Track Centerline Position by GNSS/INS/Odometer Integration. IEEE Access 2019, 7, 157241–157253. [Google Scholar] [CrossRef]
- Jiang, Q.; Wu, W.; Jiang, M.; Li, Y. A New Filtering and Smoothing Algorithm for Railway Track Surveying Based on Landmark and IMU/Odometer. Sensors 2017, 17, 1438. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Q.; Wu, W.; Li, Y.; Jiang, M. Millimeter Scale Track Irregularity Surveying Based on ZUPT-aided INS with Sub-decimeter Scale Landmarks. Sensors 2017, 17, 2083. [Google Scholar] [CrossRef] [PubMed]
- Dąbrowski, P.S.; Specht, C.; Koc, W.; Wilk, A.; Czaplewski, K.; Karwowski, K.; Specht, M.; Chrostowski, P.; Szmagliński, J.; Grulkowski, S. Installation of GNSS Receivers on a Mobile Railway Platform—Methodology and Measurement Aspects. Sci. J. Marit. Univ. Szczec. 2019, 60, 18–26. [Google Scholar] [CrossRef]
- Dąbrowski, P.S.; Specht, C.; Felski, A.; Koc, W.; Wilk, A.; Czaplewski, K.; Karwowski, K.; Jaskólski, K.; Specht, M.; Chrostowski, P.; et al. The Accuracy of a Marine Satellite Compass under Terrestrial Urban Conditions. J. Mar. Sci. Eng. 2020, 8, 18. [Google Scholar] [CrossRef]
- VRSNet.pl. VRSNet.pl—Reference Station Network. Available online: http://vrsnet.pl/ (accessed on 30 June 2020). (In Polish).
- Trimble. Trimble Access Field Software. Available online: https://www.trimble.com/survey/trimble-access-is-monitoring.aspx (accessed on 30 June 2020).
- Specht, C. Availability, Reliability and Continuity Model of Differential GPS Transmission. Annu. Navig. 2003, 5, 1–85. [Google Scholar]
- Specht, M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors 2019, 19, 3860. [Google Scholar] [CrossRef]
- Barlow, R.E.; Proschan, F. Statistical Theory of Reliability and Life Testing: Probability Models; Holt, Rinehart and Winston: New York, NY, USA, 1974. [Google Scholar]
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 15 October 2012 on the National Spatial Reference System; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2012. (In Polish) [Google Scholar]
- Petovello, M. Would You Prefer to Have More Signals or More Satellites. Inside GNSS 2017, 2017, 45–47. [Google Scholar]
- Reuper, B.; Becker, M.; Leinen, S. Benefits of Multi-constellation/Multi-frequency GNSS in a Tightly Coupled GNSS/IMU/Odometry Integration Algorithm. Sensors 2018, 18, 3052. [Google Scholar] [CrossRef]
- Telit. The Business Advantages of a Multi GNSS Set-up. Available online: https://www.telit.com/blog/multi-gnss-business-advantages/ (accessed on 30 June 2020).
- Elmasry, O.; Tamazin, M.; Elghamarawy, H.; Karaim, M.; Noureldin, A.; Khedr, M. Examining the Benefits of Multi-GNSS Constellation for the Positioning of High Dynamics Air Platforms under Jamming Conditions. In Proceedings of the 2018 11th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, UAE, 4–6 March 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | L Receiver | T Receiver |
|---|---|---|
| Signal tracking | GPS: L1, L2, L2C, L5 GLONASS: L1, L2, L2C, L3 BDS: B1, B2, B3 Galileo: E1, E5A, E5B, AltBOC, E6 SBAS: EGNOS, GAGAN, MSAS, QZSS, WAAS | GPS: L1C/A, L1C, L2C, L2E, L5 GLONASS: L1C/A, L1P, L2C/A, L2P, L3 BDS: B1, B2, B3 Galileo: E1, E5A, E5B, E5 AltBOC SBAS: EGNOS, GAGAN, MSAS, QZSS, WAAS |
| Real Time Kinematic (RTK) accuracy | Single baseline: Hz 8 mm + 1 ppm/V 15 mm + 1 ppm Network RTK: Hz 8 mm + 0.5 ppm/V 15 mm + 0.5 ppm | Single baseline < 30 km: Hz 8 mm + 1 ppm Root Mean Square (RMS)/V 15 mm + 1 ppm RMS Network RTK: Hz 8 mm + 0.5 ppm RMS/V 15 mm + 0.5 ppm RMS |
| Post-processing accuracy | Static with long observations: Hz 3 mm + 0.1 ppm/V 3.5 mm + 0.4 ppm Static and rapid static: Hz 3 mm + 0.5 ppm/V 5 mm + 0.5 ppm | Static GNSS surveying, high-precision: Hz 3 mm + 0.1 ppm RMS/V 3.5 mm + 0.4 ppm RMS Static and fast static: Hz 3 mm + 0.5 ppm RMS/V 5 mm + 0.5 ppm RMS |
| Measurement Time | Number of GNSS Receiver of Manufacturer T | Common Measurement Time for T1–T5 | ||||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||
| GPS | ||||||
| Beginning | 01:11:05 | 01:10:52 | 01:11:11 | 01:11:14 | 01:11:18 | 01:11:18 |
| End | 01:50:59 | 01:51:02 | 01:51:06 | 01:51:37 | 01:51:50 | 01:51:50 |
| GPS/GLONASS | ||||||
| Beginning | 02:42:28 | 02:42:13 | 02:42:32 | 02:42:36 | 02:42:35 | 02:42:36 |
| End | 03:23:07 | 03:23:05 | 03:23:12 | 03:23:18 | 03:23:13 | 03:23:18 |
| GPS/GLONASS/Galileo | ||||||
| Beginning | 02:01:25 | 02:01:06 | 02:01:19 | 02:01:17 | 02:01:14 | 02:01:25 |
| End | 02:31:51 | 02:31:36 | 02:31:55 | 02:31:58 | 02:31:59 | 02:31:59 |
| GPS | GPS/GLONASS | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameter | T1 | T2 | T3 | T4 | T5 | Mean | T1 | T2 | T3 | T4 | T5 | Mean |
| Mean PDOP | 2.41 | 2.5 | 3.37 | 2.39 | 2.36 | 2.61 | 2.51 | 2.2 | 2.7 | 2.21 | 2.26 |  2.38 (−8.83%) 2.38 (−8.83%) |
| Min. PDOP | 1.9 | 1.9 | 1.9 | 1.9 | 1.9 | 1.9 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 (−36.84%) |
| Mean NoS | 6.61 | 6.5 | 5.83 | 6.59 | 6.65 | 6.44 | 11.3 | 11.5 | 11.0 | 11.6 | 11.5 |  11.38 (+76.82%) 11.38 (+76.82%) |
| GPS/GLONASS | GPS/GLONASS/Galileo | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameter | T1 | T2 | T3 | T4 | T5 | Mean | T1 | T2 | T3 | T4 | T5 | Mean |
| Mean PDOP | 2.51 | 2.2 | 2.7 | 2.21 | 2.26 | 2.38 | 2.62 | 2.84 | 2.68 | 2.7 | 3.5 | 2.87 (+20.71%) |
| Min. PDOP | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | 1.4 | 1.24 (+3.33%) |
| Mean NoS | 11.3 | 11.5 | 11.0 | 11.6 | 11.5 | 11.38 | 14 | 14 | 13 | 14 | 11 | 13.2 (+15.99%) |
| GNSS Solution | Max Error | Availability of a 1D Position [%] | Relative Availability [+/− %] | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | Mean | GPS vs. GPS/GLO | GPS vs. GPS/GLO/Gal | GPS/GLO vs. GPS/GLO/Gal | ||
| GPS | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | |||
| 3 cm | 56.49 | 40.3 | 52.37 | 21.13 | 23.33 | 38.72 | ||||
| 10 cm | 95.64 | 93.9 | 88.48 | 95.48 | 97.71 | 94.24 | ||||
| GPS/GLONASS | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 3 cm | 82.79 | 74.76 | 76.54 | 81.6 | 79.5 | 79.04 | 40.32 | |||
| 10 cm | 98.56 | 98.56 | 98.33 | 98.85 | 98.28 | 98.52 | 4.28 | |||
| GPS/GLONASS/Galileo | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 3 cm | 90.94 | 73.52 | 73.53 | 79.52 | 76.95 | 78.89 | 40.17 | −0.15 | ||
| 10 cm | 99.65 | 97.91 | 97.18 | 98.92 | 93.47 | 97.43 | 3.19 | −1.09 | ||
| GNSS Solution | Max Error | Availability of a 2D Position [%] | Relative Availability [+/− %] | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | Mean | GPS vs. GPS/GLO | GPS vs. GPS/GLO/Gal | GPS/GLO vs. GPS/GLO/Gal | ||
| GPS | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | |||
| 3 cm | 85.72 | 80.37 | 84.12 | 73.71 | 77.44 | 80.27 | ||||
| 10 cm | 97.77 | 94.22 | 90.77 | 98.19 | 98.62 | 95.91 | ||||
| GPS/GLONASS | 1 cm | 26.1 | 19.68 | 21.37 | 14.51 | 16.38 | 19.61 | 19.61 | ||
| 3 cm | 87.93 | 84.12 | 88.08 | 95.82 | 89.21 | 89.03 | 8.76 | |||
| 10 cm | 98.81 | 99.56 | 98.93 | 99.4 | 99.27 | 99.19 | 3.28 | |||
| GPS/GLONASS/Galileo | 1 cm | 51.06 | 29.3 | 33.06 | 43.69 | 20.67 | 35.56 | 35.56 | 15.95 | |
| 3 cm | 97.79 | 88.26 | 88.23 | 92.25 | 91.09 | 91.52 | 11.25 | 2.49 | ||
| 10 cm | 99.88 | 99.3 | 99.08 | 99.71 | 95.18 | 98.63 | 2.72 | −0.56 | ||
| GNSS Solution | Max Error | Availability of a 3D Position [%] | Relative Availability [+/− %] | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | Mean | GPS vs. GPS/GLO | GPS vs. GPS/GLO/Gal | GPS/GLO vs. GPS/GLO/Gal | ||
| GPS | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | |||
| 3 cm | 27.95 | 21.08 | 23.09 | 7.7 | 7.93 | 17.55 | ||||
| 10 cm | 94.74 | 90.73 | 87.67 | 94.26 | 96.74 | 92.83 | ||||
| GPS/GLONASS | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 3 cm | 71.23 | 65.61 | 60.83 | 65.09 | 60.50 | 64.65 | 47.1 | |||
| 10 cm | 98.05 | 97.96 | 98.08 | 98.8 | 97.73 | 98.12 | 5.29 | |||
| GPS/GLONASS/Galileo | 1 cm | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 3 cm | 74.26 | 66.35 | 67.5 | 74.32 | 71.03 | 70.69 | 53.14 | 6.04 | ||
| 10 cm | 99.25 | 96.24 | 96.72 | 98.41 | 91.76 | 96.48 | 3.65 | −1.64 | ||
| T | GPS | GPS/GLONASS | GPS/GLONASS/Galileo |
|---|---|---|---|
| 1 |  |  |  |
| 2 |  |  |  |
| 3 |  |  |  |
| 4 |  |  |  |
| 5 |  |  |  |
| T | GPS | GPS/GLONASS | GPS/GLONASS/Galileo |
|---|---|---|---|
| 1 |  |  |  |
| 2 |  |  |  |
| 3 |  |  |  |
| 4 |  |  |  |
| 5 |  |  |  |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, M.; Specht, C.; Wilk, A.; Koc, W.; Smolarek, L.; Czaplewski, K.; Karwowski, K.; Dąbrowski, P.S.; Skibicki, J.; Chrostowski, P.; et al. Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions. Energies 2020, 13, 3646. https://doi.org/10.3390/en13143646
Specht M, Specht C, Wilk A, Koc W, Smolarek L, Czaplewski K, Karwowski K, Dąbrowski PS, Skibicki J, Chrostowski P, et al. Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions. Energies. 2020; 13(14):3646. https://doi.org/10.3390/en13143646
Chicago/Turabian StyleSpecht, Mariusz, Cezary Specht, Andrzej Wilk, Władysław Koc, Leszek Smolarek, Krzysztof Czaplewski, Krzysztof Karwowski, Paweł S. Dąbrowski, Jacek Skibicki, Piotr Chrostowski, and et al. 2020. "Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions" Energies 13, no. 14: 3646. https://doi.org/10.3390/en13143646
APA StyleSpecht, M., Specht, C., Wilk, A., Koc, W., Smolarek, L., Czaplewski, K., Karwowski, K., Dąbrowski, P. S., Skibicki, J., Chrostowski, P., Szmagliński, J., Grulkowski, S., & Judek, S. (2020). Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions. Energies, 13(14), 3646. https://doi.org/10.3390/en13143646