Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet In-Wheel Motor



Abstract
:1. Introduction
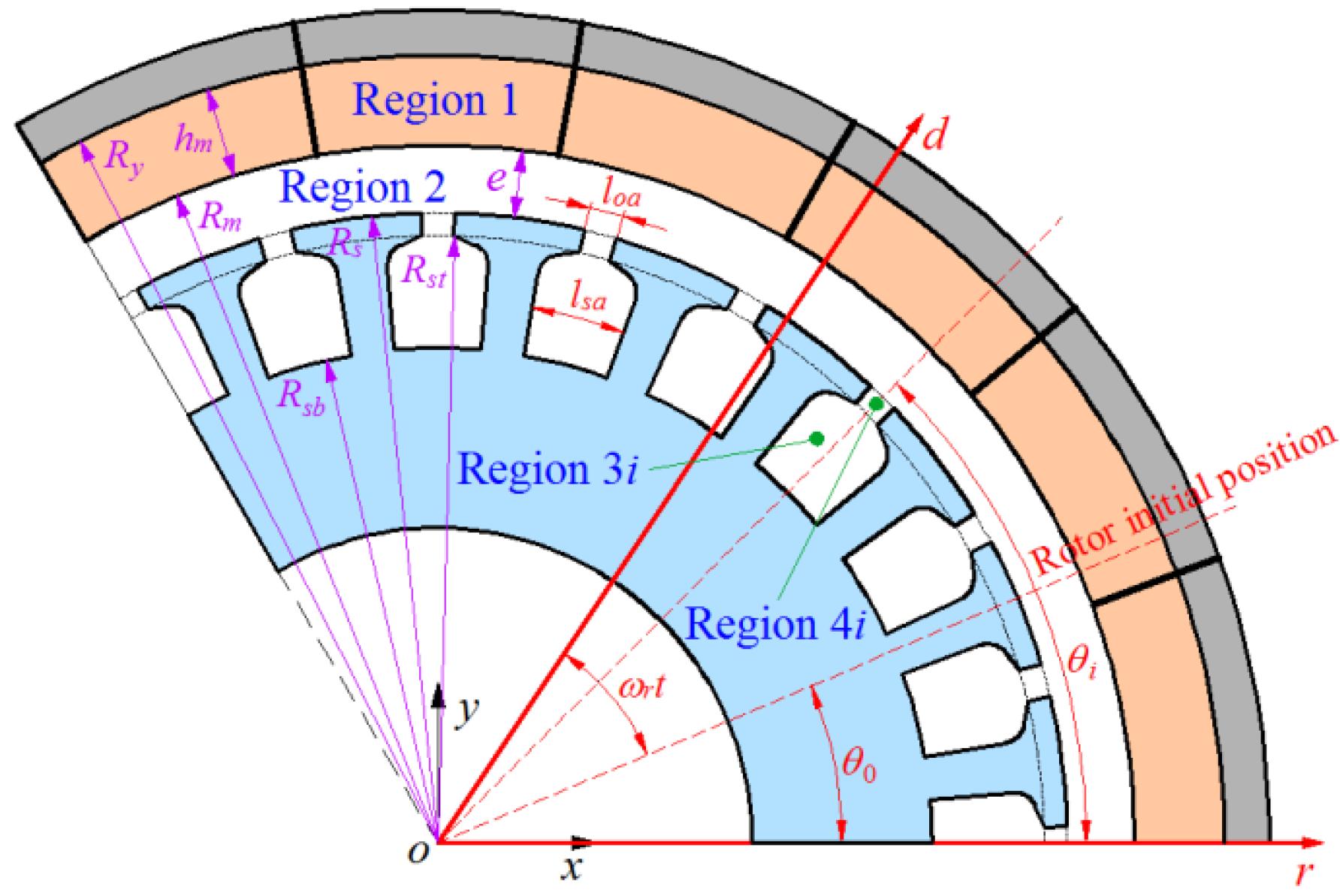
2. Structure of the Integrated PM-IWM
3. Analysis of Magnetic Exciting Source
3.1. Analytical Model of Magnetic Field
3.1.1. Vector Potential Distribution
3.1.2. Interface Conditions and Harmonic Coefficient Solution
3.1.3. Flux Density of Air-Gap Subdomain
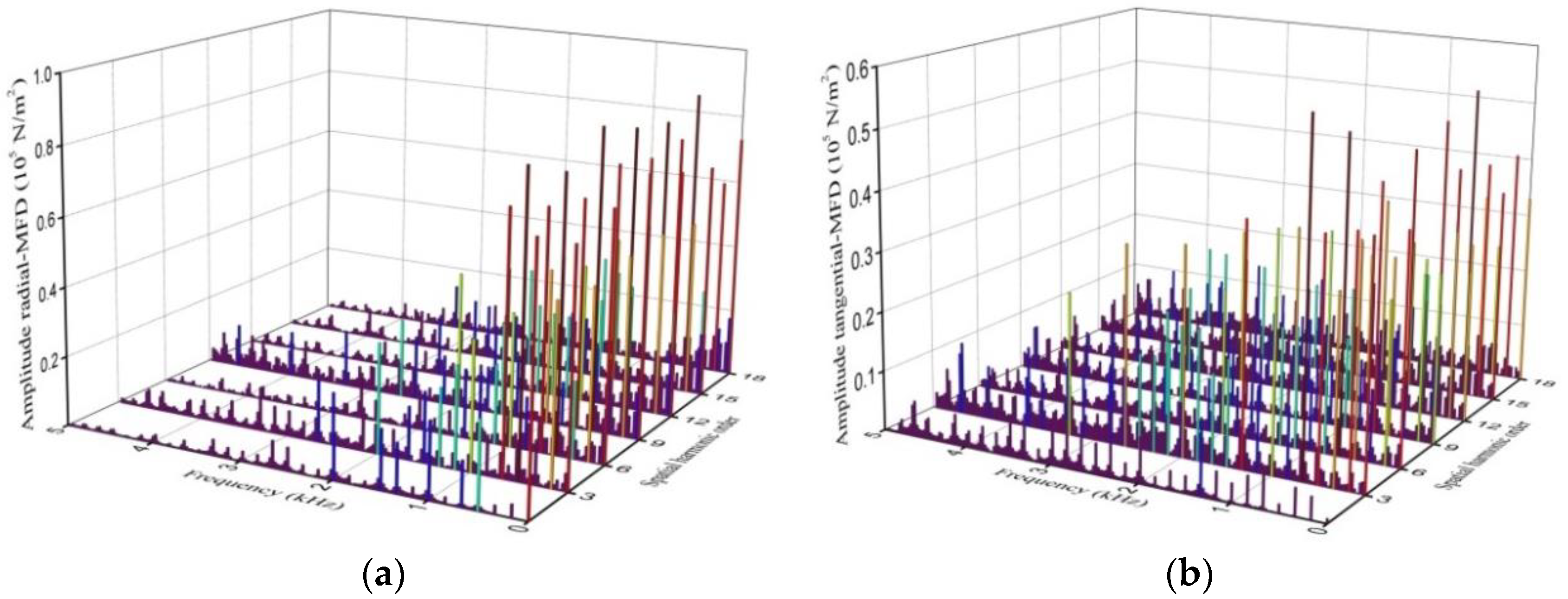
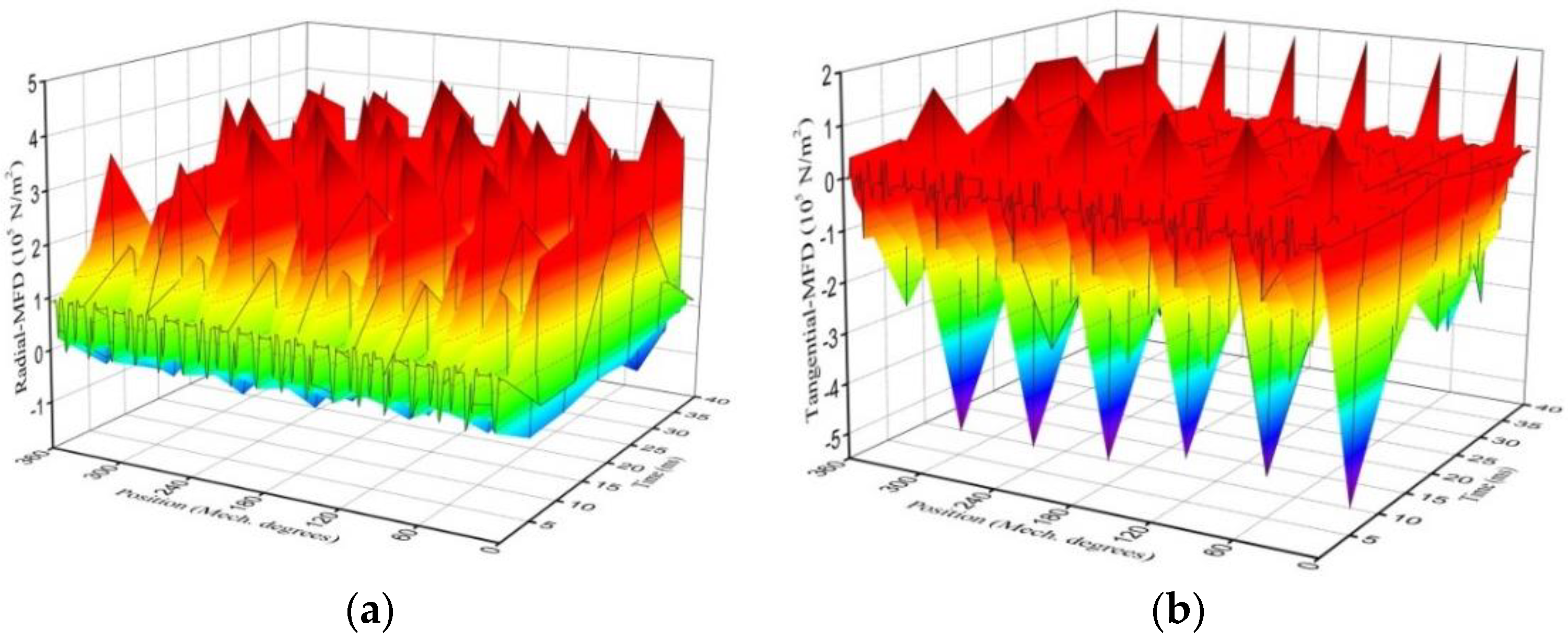
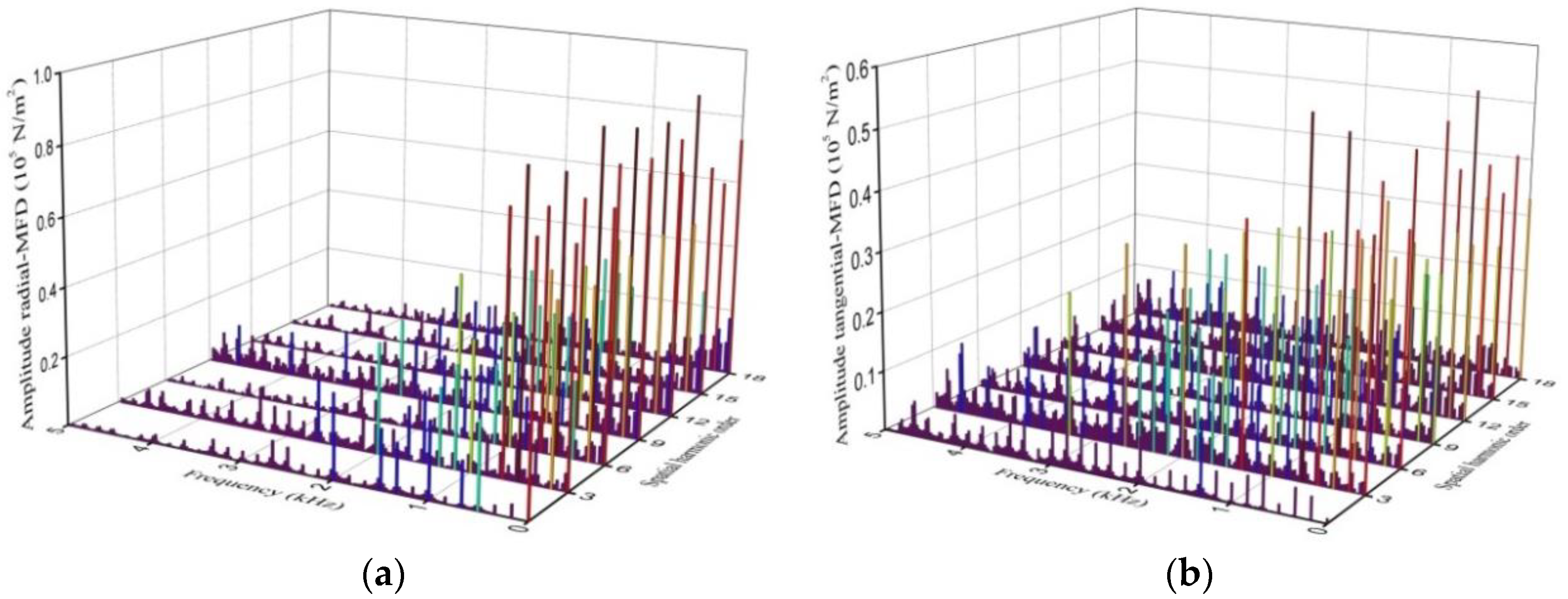
3.2. Electromagnetic Force Model
3.3. Electromagnetic Finite Element Calculation and Analysis
4. Analysis of Vertical Electromagnetic Vibration
4.1. Vertical Dynamics Model
4.2. Vibration Response under Magnetic Force Harmonics
5. Optimization and Verification of Slot–Pole Structure Parameters
5.1. Multi-Objective Optimization Based on AWPSO Algorithm
5.2. Verification and Discussions
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Deng, W.Z.; Zuo, S.G. Electromagnetic Vibration and Noise of the Permanent Magnet Synchronous Motors for Electric Vehicles: An Overview. IEEE Trans. Transp. Electrif. 2019, 5, 59–70. [Google Scholar] [CrossRef]
- Kim, D.; Song, J.; Jang, G. Magnetic and Structural Finite Element Analysis of Rotor Vibrations Due to Magnetic Forces in IPM Motor. IEEE Trans. Magn. 2014, 50, 7018604. [Google Scholar] [CrossRef]
- Dubas, F.; Espanet, C. Analytical Solution of the Magnetic Field in Permanent-Magnet Motors Taking Into Account Slotting Effect: No-Load Vector Potential and Flux Density Calculation. IEEE Trans. Magn. 2009, 45, 2097–2109. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xia, Z.P.; Wu, L.J.; Jewell, G.W. Analytical Modeling and Finite-Element Computation of Radial Vibration Force in Fractional-Slot Permanent-Magnet Brushless Machines. IEEE Trans. Ind. Appl. 2010, 46, 1908–1918. [Google Scholar] [CrossRef]
- Islam, R.; Husain, I. Analytical Model for Predicting Noise and Vibration in Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Appl. 2011, 46, 2346–2354. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, L.J.; Xia, Z.P. An Accurate Subdomain Model for Magnetic Field Computation in Slotted Surface-Mounted Permanent-Magnet Machines. IEEE Trans. Magn. 2010, 46, 1100–1114. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.; Popescu, M.; Hawkins, D. Analytical Prediction of Electromagnetic Performance of Surface-mounted PM Machines Based on Subdomain Model Accounting for Tooth-tips. IET Electr. Power Appl. 2011, 5, 597–609. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.; Popescu, M.; Hawkins, D. An Improved Subdomain Model for Predicting Magnetic Field of Surface-Mounted Permanent Magnet Machines Accounting for Tooth-Tips. IEEE Trans. Magn. 2011, 47, 1693–1704. [Google Scholar] [CrossRef]
- Krotsch, J.; Piepenbreier, B. Radial Forces in External Rotor Permanent Magnet Synchronous Motors with Non-Overlapping Windings. IEEE Trans. Ind. Electron. 2012, 59, 2267–2276. [Google Scholar] [CrossRef]
- Dajaku, G.; Gerling, D. The Influence of Permeance Effect on the Magnetic Radial Forces of Permanent Magnet Synchronous Machines. IEEE Trans. Magn. 2013, 49, 2953–2966. [Google Scholar] [CrossRef]
- Wang, S.M.; Hong, J.F.; Sun, Y.G.; Cao, H. Exciting Force and Vibration Analysis of Stator Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2018, 54, 8108205. [Google Scholar] [CrossRef]
- Shin, H.J.; Choi, J.Y.; Park, H.I.; Jang, S.M. Vibration Analysis and Measurements Through Prediction of Electromagnetic Vibration Sources of Permanent Magnet Synchronous Motor Based on Analytical Magnetic Field Calculations. IEEE Trans. Magn. 2012, 48, 4216–4219. [Google Scholar] [CrossRef]
- Ko, H.S.; Kim, K.J. Characterization of noise and vibration sources in interior permanent-magnet brushless DC motors. IEEE Trans. Magn. 2004, 40, 3482–3489. [Google Scholar] [CrossRef]
- Jang, I.S.; Ham, S.H.; Kim, W.H.; Jin, C.S.; Cho, S.Y.; Lee, K.D.; Lee, J.J.; Kang, D.; Lee, J. Method for Analyzing Vibrations Due to Electromagnetic Force in Electric Motors. IEEE Trans. Magn. 2014, 50, 297–300. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.G.; Wu, X.D. Electromagnetic vibration and noise analysis of permanent magnet synchronous motor with different slot-pole combinations. IET Electr. Power Appl. 2016, 10, 900–908. [Google Scholar] [CrossRef]
- Lee, S.H.; Hong, J.P.; Lee, W.T.; Lee, J.Y.; Kim, Y.K. Optimal design for noise reduction in interior permanent magnet motor. IEEE Trans. Ind. Appl. 2009, 45, 1954–1960. [Google Scholar]
- Sai, S.R.B.; Md. Tawhid, B.T.; Choi, S. Optimal Torque Ripple Reduction Technique for Outer Rotor Permanent Magnet Synchronous Reluctance Motors. IEEE Trans. Energy Conver. 2018, 33, 1184–1192. [Google Scholar]
- Hur, J.; Reu, J.W.; Kim, B.W.; Kang, G.H. Vibration Reduction of IPM-Type BLDC Motor Using Negative Third Harmonic Elimination Method of Air-Gap Flux Density. IEEE Trans. Ind. Appl. 2011, 47, 1300–1309. [Google Scholar]
- Min, S.G.; Bramerdorfer, G.; Sarlioglu, B. Analytical Modeling and Optimization for Electromagnetic Performances of Fractional-Slot PM Brushless Machines. IEEE Trans. Ind. Electron. 2018, 65, 4017–4027. [Google Scholar] [CrossRef]
- Lee, C.M.; Seol, H.S.; Lee, J.Y.; Lee, S.H.; Kang, D.W. Optimization of Vibration and Noise Characteristics of Skewed Permanent Brushless Direct Current Motor. IEEE Trans. Magn. 2017, 53, 8210605. [Google Scholar] [CrossRef]
- Kim, D.Y.; Nam, J.K.; Jang, G.H. Reduction of Magnetically Induced Vibration of a Spoke-Type IPM Motor Using Magnetomechanical Coupled Analysis and Optimization. IEEE Trans. Magn. 2013, 49, 5097–5105. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.G.; Deng, W.Z.; Wu, S.L. Reduction of vibration and acoustic noise in permanent magnet synchronous motor by optimizing magnet forces. J. Sound Vib. 2018, 429, 193–205. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Values | Parameters | Symbol | Values |
|---|---|---|---|---|---|
| Pole number | 2p | 18 | Slot top radius | Rst | 166 mm |
| Slot number | Ns | 24 | Slot bottom radius | Rsb | 135 mm |
| Magnet thickness | hm | 5 mm | Relative permeability of magnet | μr | 1.02 H/m |
| Winding turns | wt | 48 | Slot width angle | lsa | 8.5° |
| Pole-arc/pole-pitch | σp | 0.9 | Slot opening width angle | loa | 2.7° |
| Outer rotor radius | Ry | 178.5 mm | Magnet remanence | Br | 0.96 T |
| Inner rotor radius | Rm | 172.5 mm | Rated speed | ωr | 1500 r/min |
| Air-gap length | e | 1.5 mm | Rated current | Ir | 55 A |
| Active length | la | 120 mm | Rated power | Pr | 25 kW |
| Stator bore radius | Rs | 171 mm | Rated torque | Tr | 159 N·m |
| Variable | Value | Variable | Value |
|---|---|---|---|
| m1 (kg) | 31.29 | c21 (N·s/m) | 0 |
| m2 (kg) | 16.50 | k22 (kN/m) | 11700 |
| m3 (kg) | 19.90 | c22 (N·s/m) | 650 |
| k1 (kN/m) | 195.80 | k3 (kN/m) | 80 |
| c1 (N·s/m) | 1100 | c3 (N·s/m) | 1100 |
| k21 (kN/m) | 35,000 |
| Design Variable | Initial Value | Preset Range | Step Value |
|---|---|---|---|
| σp | 0.9 | 0.7~0.95 | 0.01 |
| hm | 5 mm | 4.0~6.0 mm | 0.1 mm |
| lsa | 8.5° | 7.0~9.0° | 0.05° |
| loa | 2.7° | 2.0~3.0° | 0.05° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zhao, P.; Du, X.; Lin, F.; Li, X. Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet In-Wheel Motor. Energies 2020, 13, 3488. https://doi.org/10.3390/en13133488
Wang Q, Zhao P, Du X, Lin F, Li X. Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet In-Wheel Motor. Energies. 2020; 13(13):3488. https://doi.org/10.3390/en13133488
Chicago/Turabian StyleWang, Qiang, Pingping Zhao, Xianbin Du, Fen Lin, and Xu Li. 2020. "Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet In-Wheel Motor" Energies 13, no. 13: 3488. https://doi.org/10.3390/en13133488
APA StyleWang, Q., Zhao, P., Du, X., Lin, F., & Li, X. (2020). Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet In-Wheel Motor. Energies, 13(13), 3488. https://doi.org/10.3390/en13133488