Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf


Abstract
:1. Introduction
1.1. Motivation
1.2. Aim of The Work
1.3. Advantages of Axial Flux Machines
2. Investigated Machines Models
2.1. Stator Construction
2.2. Rotor Construction
2.3. Windings Connection
2.4. Slots and Poles Configurations
2.5. Simulation Methods
3. Results of FEA Simulations
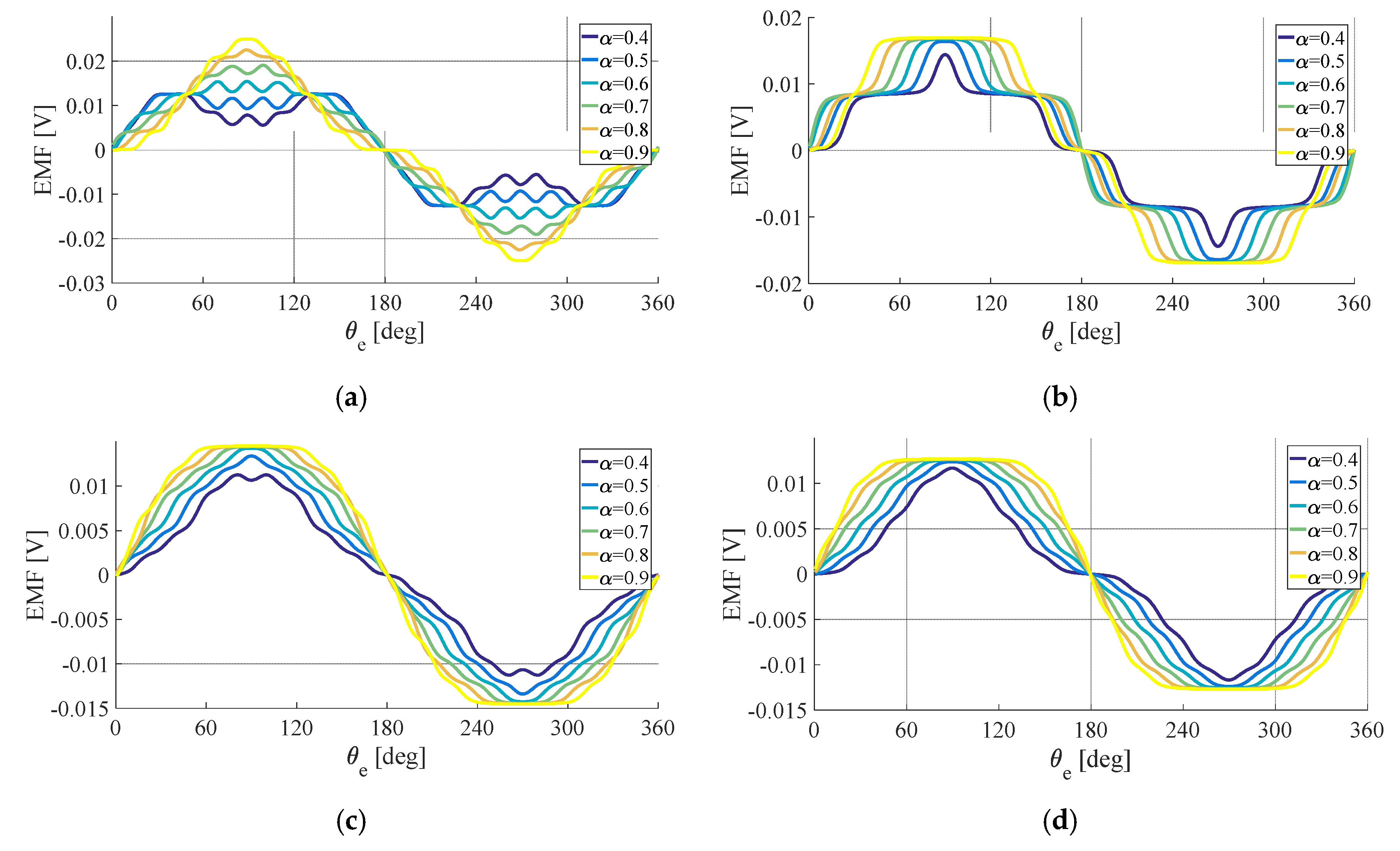
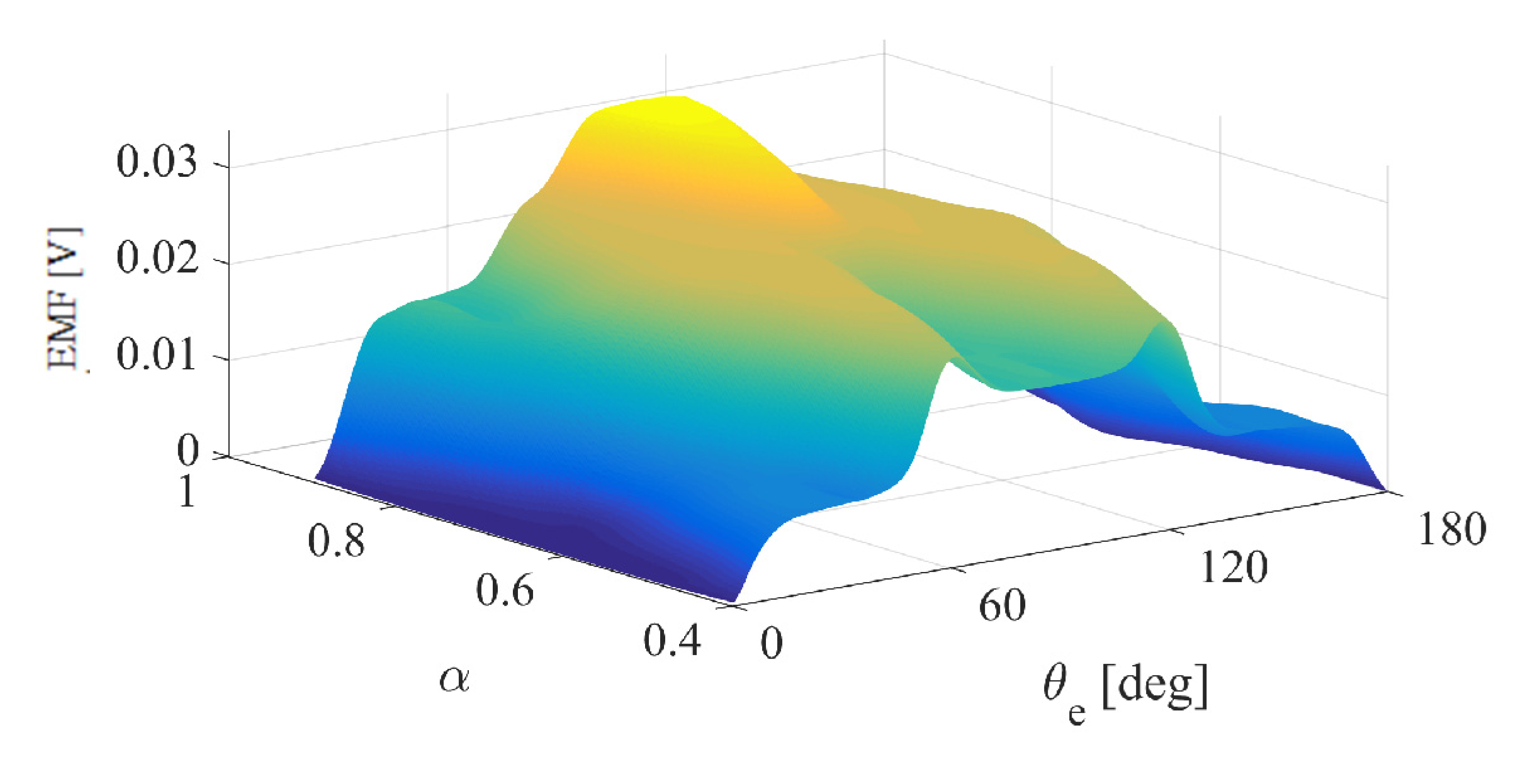
3.1. Back-Emf
3.2. Phase Back-Emf Waveforms
3.3. Line Back-Emf Waveforms
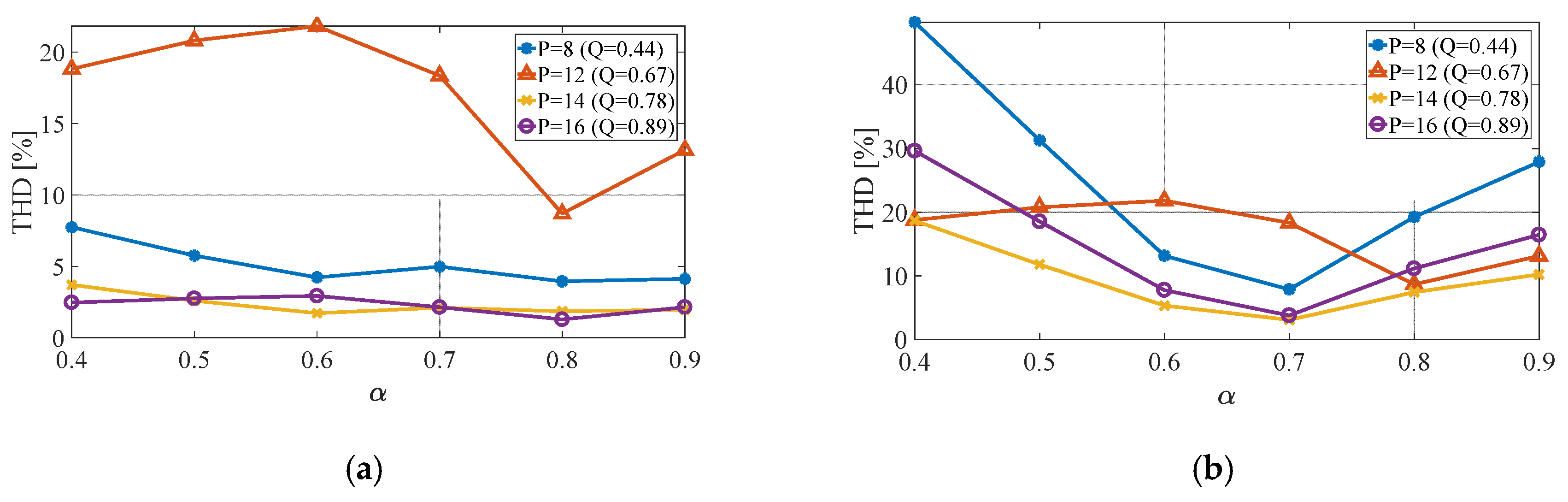
3.4. THD Comparison
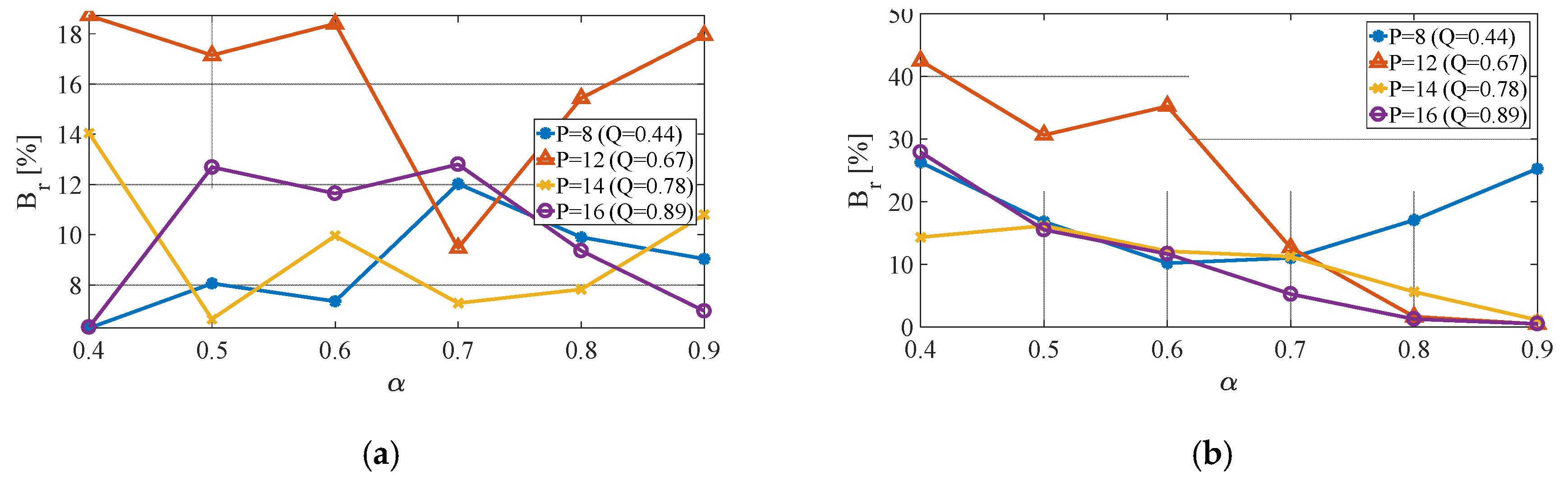
3.5. Trapezoid Ripple
3.6. RMS Comparison
3.7. Ideal Torque
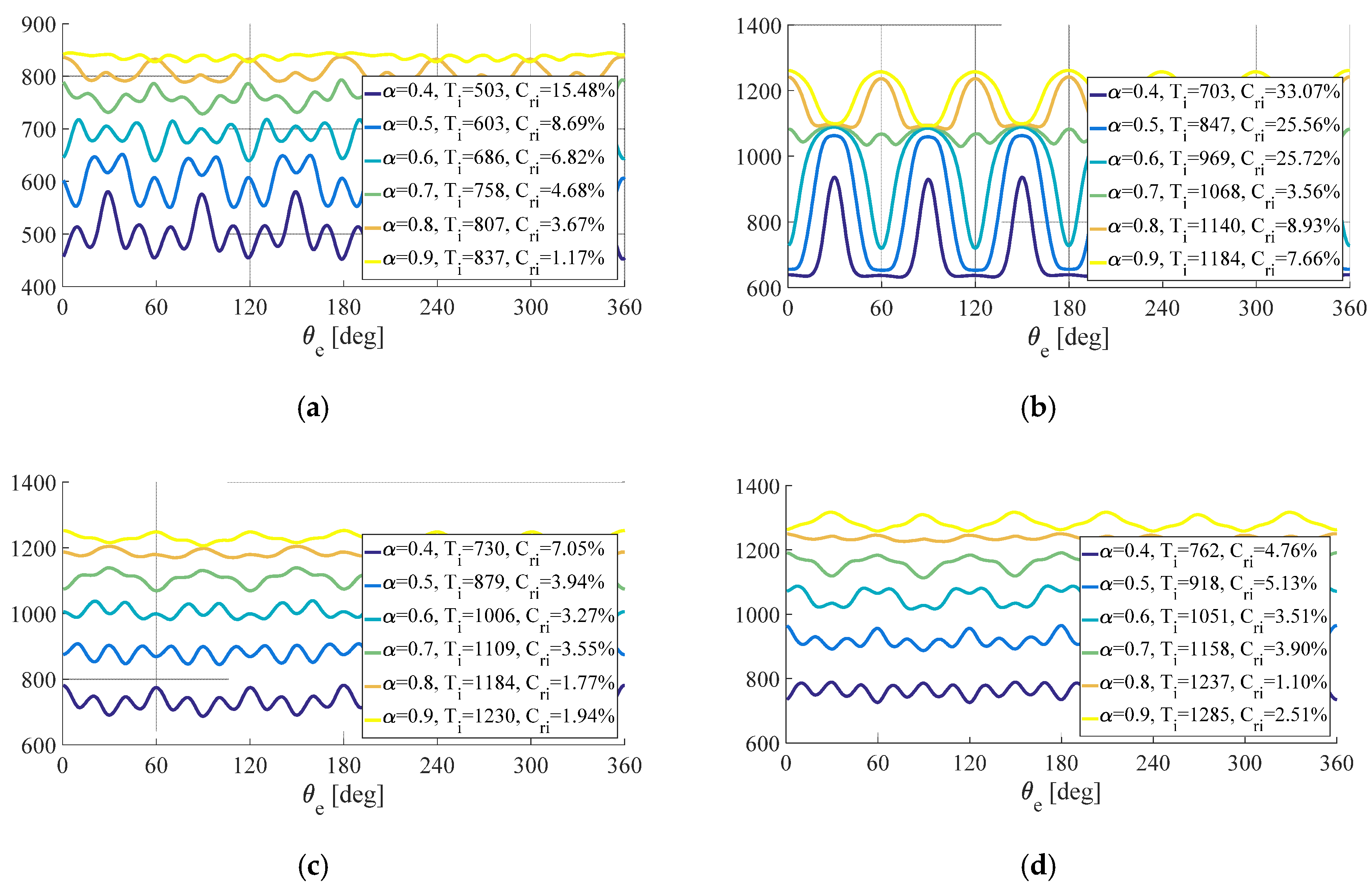
3.7.1. Ideal Torque Waveforms
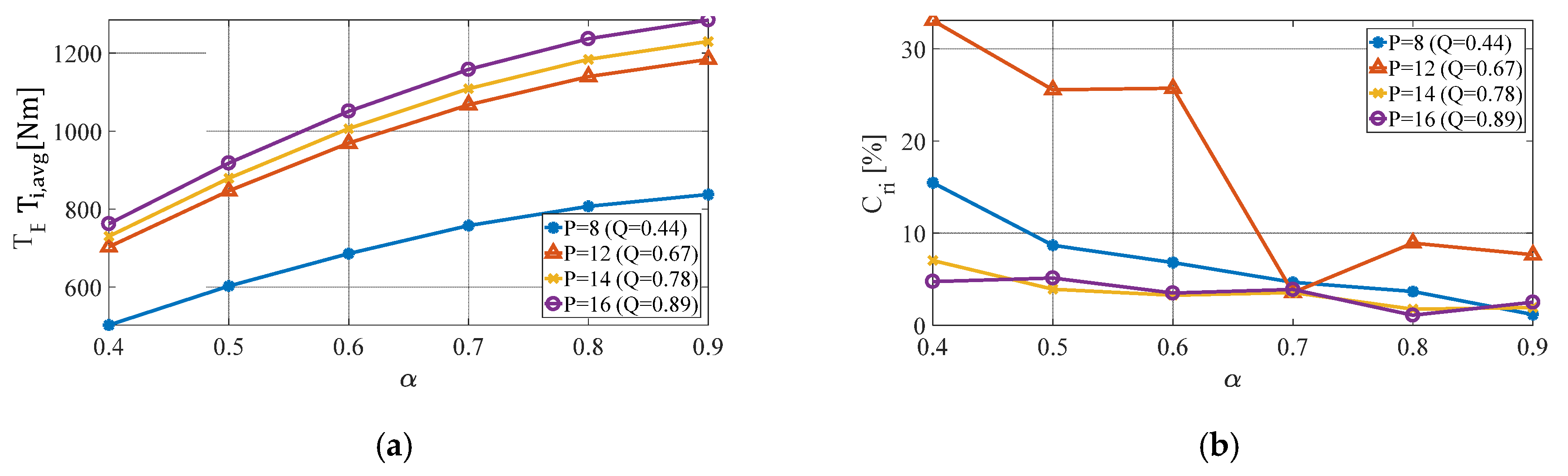
3.7.2. Ideal Torque Magnitudes & Ripples
3.7.3. Ideal Torque Ripple
3.8. Cogging Torque
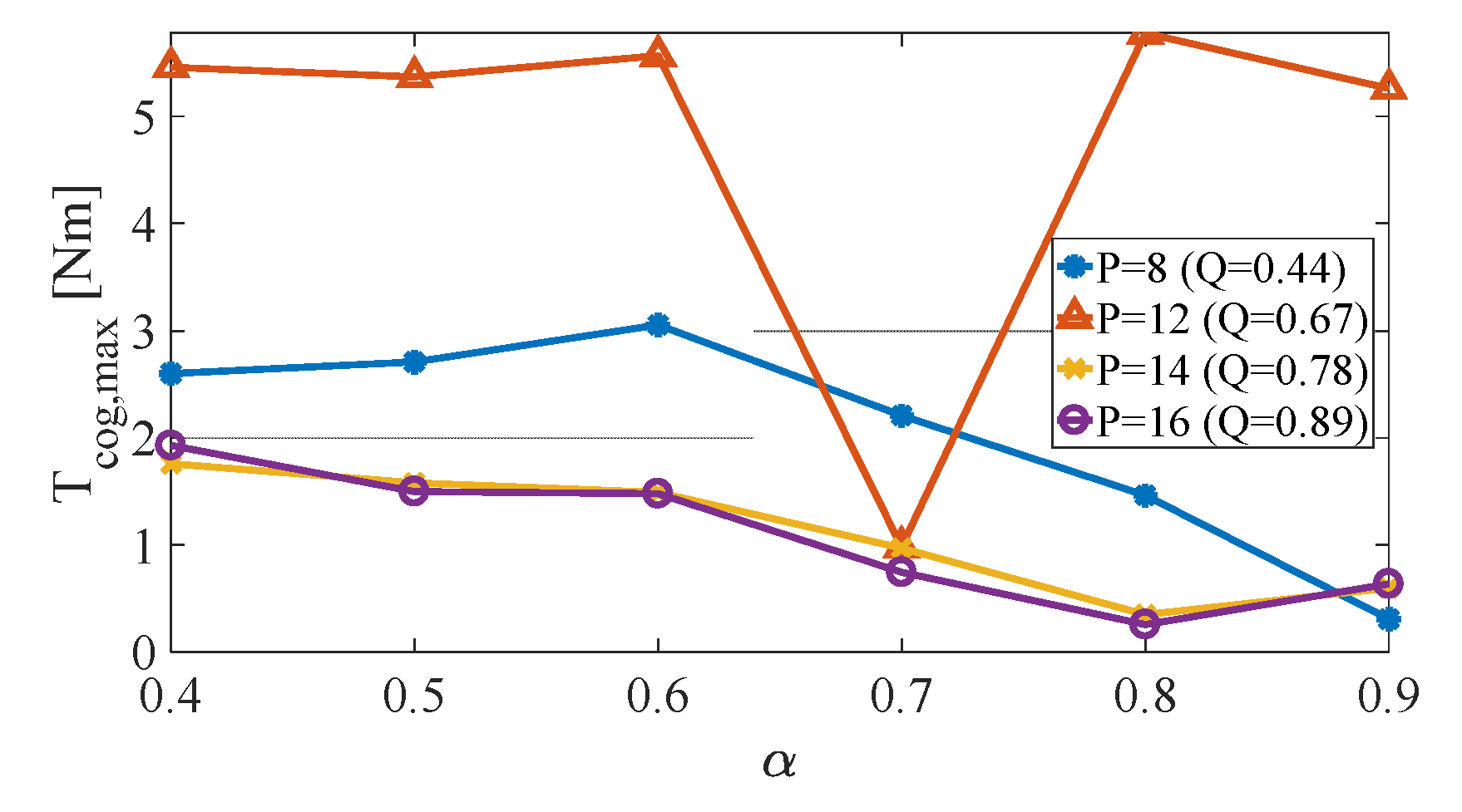
3.8.1. Maximum Cogging Torque Comparison
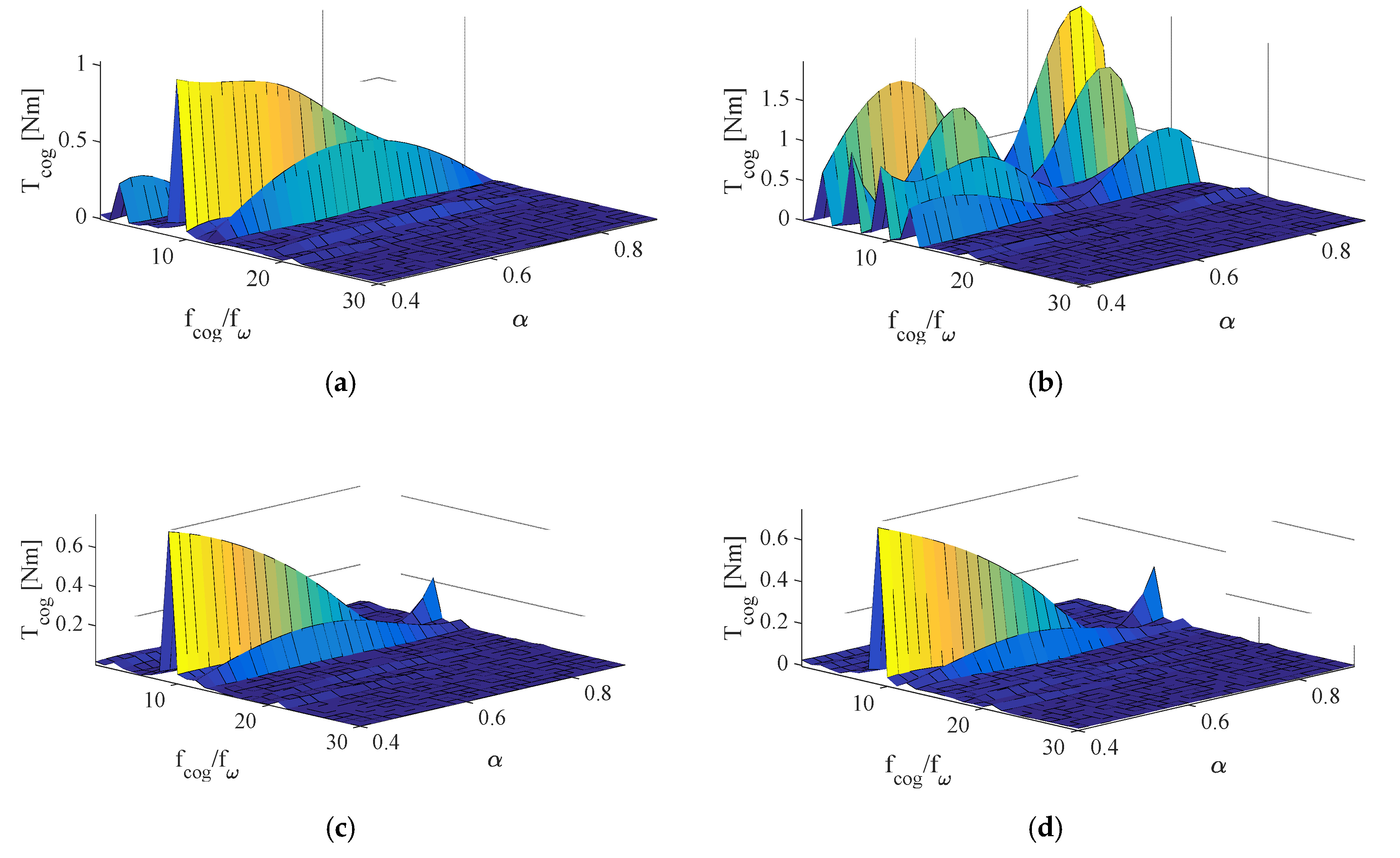
3.8.2. Cogging Torque Spectra
4. Summary
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lampérth, M.U.; Malloy, A.C.; Mlot, A.; Cordner, M. Assessment of Axial Flux Motor Technology for Hybrid Assessment of Axial Flux Motor Technology for Hybrid. World Electr. Veh. J. 2015, 7, 187–194. [Google Scholar] [CrossRef] [Green Version]
- Woolmer, T.; McCulloch, M. Analysis of the Yokeless And Segmented Armature Machine. In Proceedings of the 2007 IEEE International Electric Machines Drives Conference, Antalya, Turkey, 3–5 May 2007. [Google Scholar]
- Gieras, J.F. Permanent Magnet Technology; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Gieras, M.J. Axial Flux Permanent Magnet Brushless Machines; Springer: Dordrecht, The Netherlands, 2005. [Google Scholar]
- Patel, A.N.; Suthar, B.N.; Panchal, T.H.; Patel, R.M. Comparative Performance Analysis of Radial Flux and Dual Air-Gap Axial Flux Permanent Magnet Brushless DC Motors for Electric Vehicle Application. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018. [Google Scholar]
- Profumo, F.; Zhang, Z.; Tenconi, A. Axial flux machines drives: A new viable solution for electric cars. In Proceedings of the 1996 IEEE IECON. 22nd International Conference on Industrial Electronics, Control, and Instrumentation, Taipei, Taiwan, 9 August 1996. [Google Scholar]
- Tong, W. Mechanical Design of Electric Motors; CRC Press: Radford, VA, USA, 2014. [Google Scholar]
- Hendershot, J.R. Brushless DC Motor Phase, Pole, and Slot Configuration; Magna Physics Corporation: Hillsboro, OH, USA, 1992. [Google Scholar]
- Hendershot, J.R.; Miller, T.J.E. Design of Brushless Permanent-Magnet Motors; Magna Physics Publishing and Oxford University Press: Hillsboro, Ohio, USA, 1994. [Google Scholar]
- Sitapati, K.; Krishnan, R. Performance comparisons of radial and axial field permanent magnet brushless machines. IEEE Trans. Ind. Appl. 2001, 37, 1219–1226. [Google Scholar] [CrossRef]
- Hanselman, D. Brushless Permanent Magnet Motor Design; Magna Physics Publishing: Orono, ME, USA, 2006. [Google Scholar]
- Parviainen, A. Design of Axial Flux Permanent-Magnet Low Speed Machines and Performance Comparison between Radial-Flux and Axial Flux Machines. Ph.D. Thesis, Lappeenranta University of Technology, Lappeenranta, Finland, 2005. [Google Scholar]
- Kappatou, J.; Zalokostas, G.; Spyratos, D. 3-D FEM Analysis, Prototyping and Tests of an Axial Flux Permanent-Magnet Wind Generator. Energies 2017, 10, 1269. [Google Scholar] [CrossRef] [Green Version]
- Pyrhönen, J.; Jokinen, T.; Hrabovcová, V. Design of Rotating Electrical Machines; Wiley: Chichester, UK, 2008. [Google Scholar]
- Ostović, V. The Art and Science of Rotating Field Machines Design: A Practical Approach; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Cardoso, J.R. Electromagnetics through the Finite Element Method; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Outer Diameter () | |
| Inner Diameter () | |
| Conductor Intersection Area | |
| Current Density (RMS) | 20 |
| Parameter | Value |
|---|---|
| Rotor Yoke Thickness | 8 |
| Air Gap () | 1 |
| Magnet Thickness () | 8 |
| Poles | Phase | Phase Coil #1 | Phase Coil #2 | Phase Coil #3 |
|---|---|---|---|---|
| 8 | A | 1 | −3 | 5 |
| B | 7 | −9 | 2 | |
| C | 4 | −6 | 8 | |
| 12 | A | 1 | 4 | 7 |
| B | 2 | 5 | 8 | |
| C | 3 | 6 | 9 | |
| 14 | A | 1 | −5 | 6 |
| B | 2 | −3 | 7 | |
| C | −4 | 8 | −9 | |
| 16 | A | −7 | 8 | −9 |
| B | −1 | 2 | −3 | |
| C | −4 | 5 | −6 |
| P | Q | GCD(P, Ns) | Ns |
|---|---|---|---|
| 8 | 0.44 | 2 | 18 |
| 12 | 0.67 | 6 | |
| 14 | 0.78 | 2 | |
| 16 | 0.89 | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hajnrych, S.J.; Jakubowski, R.; Szczypior, J. Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf. Energies 2020, 13, 3418. https://doi.org/10.3390/en13133418
Hajnrych SJ, Jakubowski R, Szczypior J. Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf. Energies. 2020; 13(13):3418. https://doi.org/10.3390/en13133418
Chicago/Turabian StyleHajnrych, Stanisław J., Rafał Jakubowski, and Jan Szczypior. 2020. "Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf" Energies 13, no. 13: 3418. https://doi.org/10.3390/en13133418
APA StyleHajnrych, S. J., Jakubowski, R., & Szczypior, J. (2020). Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf. Energies, 13(13), 3418. https://doi.org/10.3390/en13133418