Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events



Abstract
1. Introduction
2. Frequency Response According to United Kingdom (UK) National Grid Code Requirements
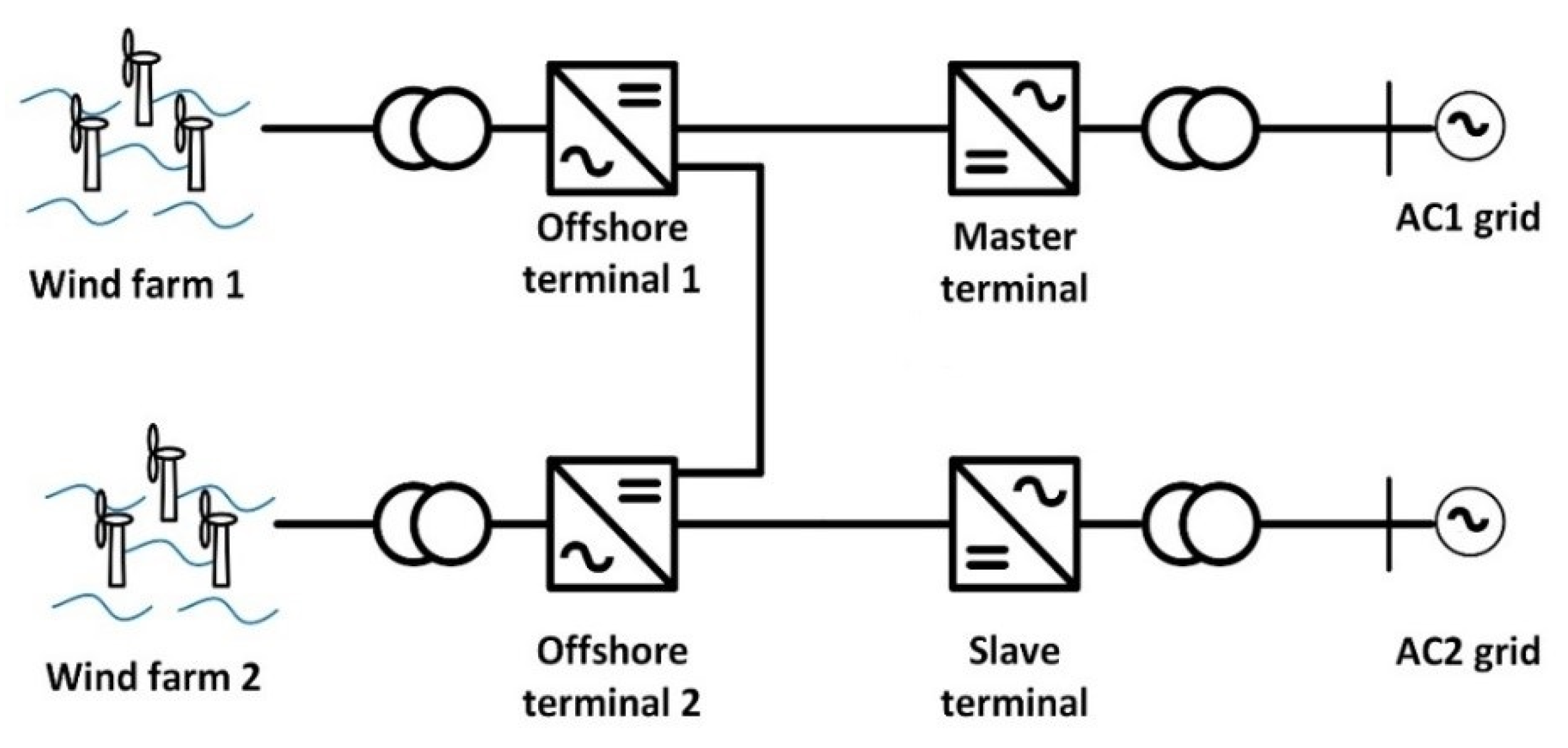
3. Multi-Terminal Direct Current (MTDC) Grid Topology and Control Systems
3.1. MTDC Grid Supervisory Control System
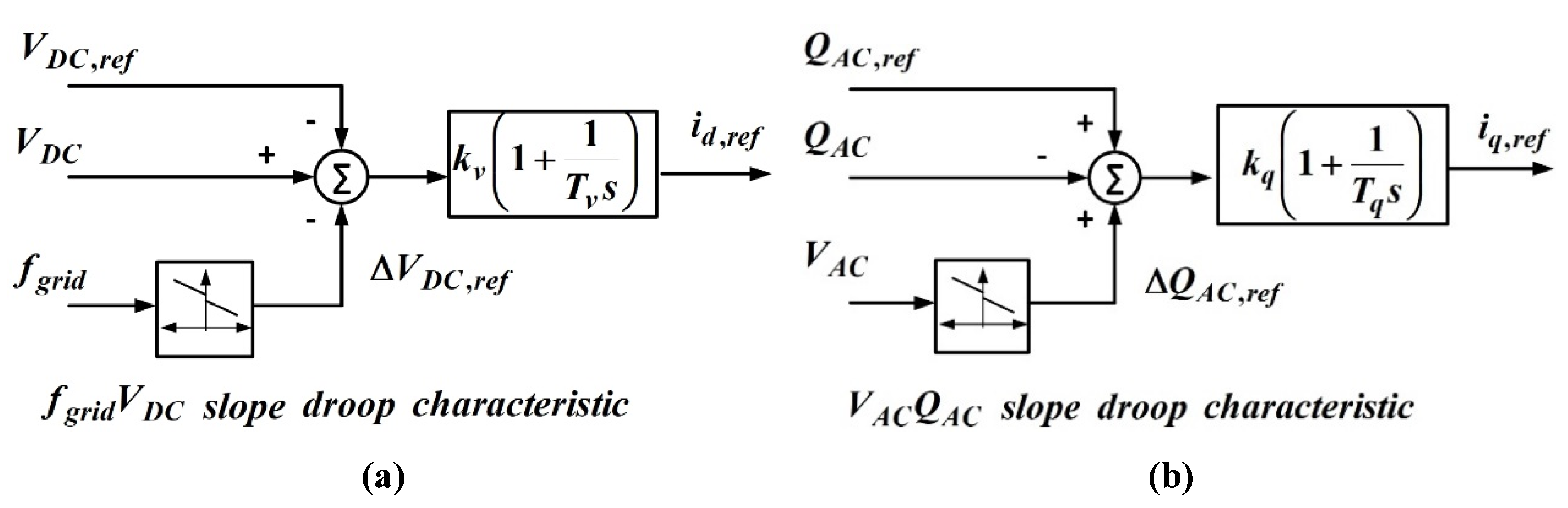
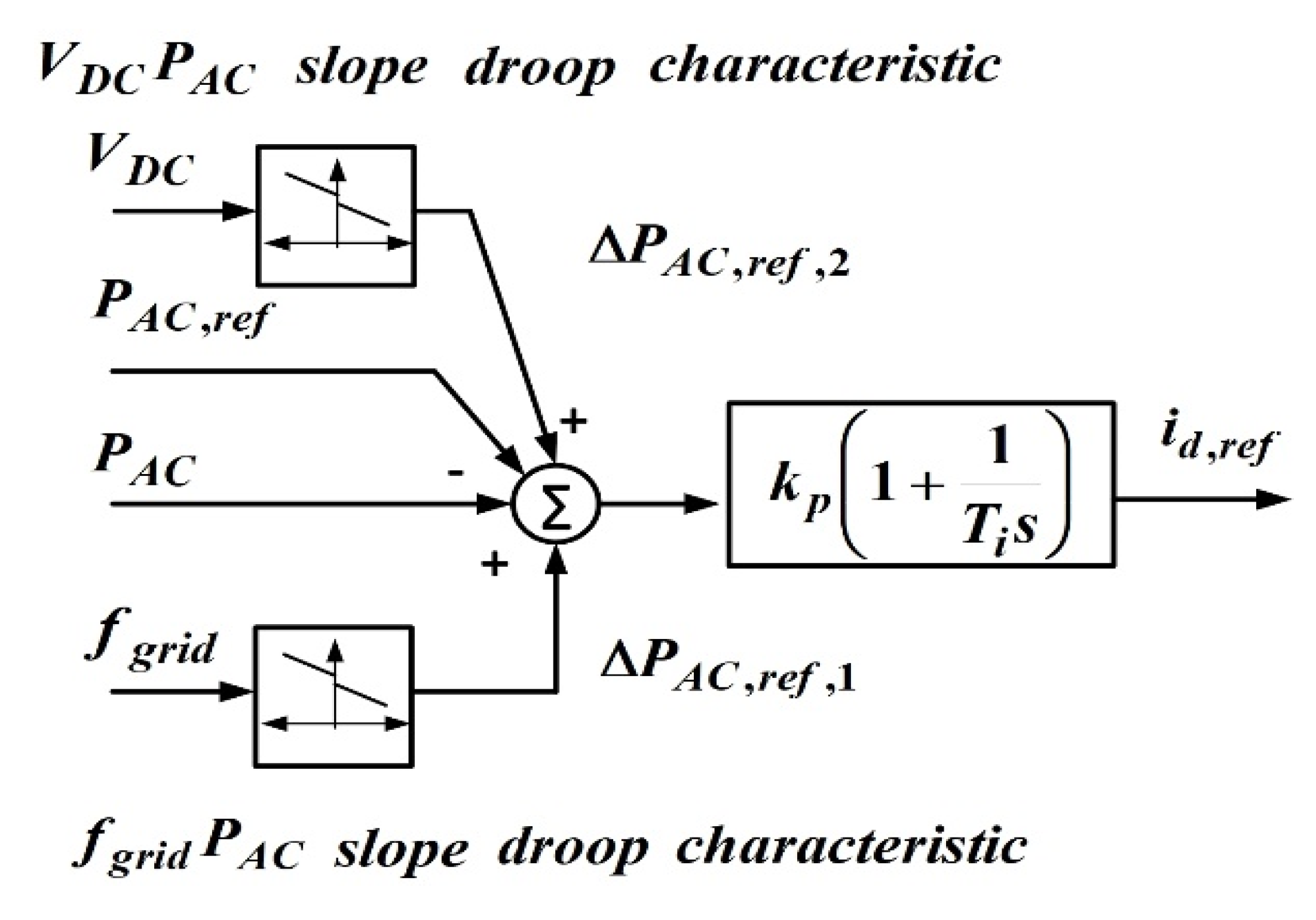
3.2. Control Systems at Terminal Level
3.2.1. Onshore Terminals
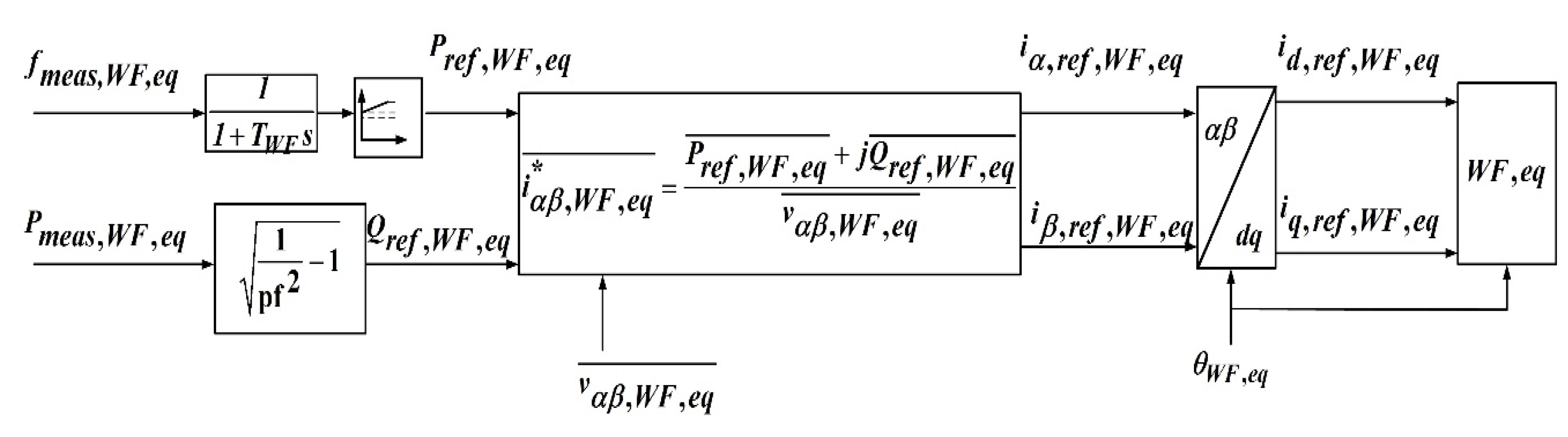
3.2.2. Offshore Terminals
4. Open-Loop Frequency Response of the MTDC Grid
5. Onshore Alternating Current (AC) Grid Model to Emulate Frequency Response
6. Novel Methodology to Tune MTDC Supervisory and Frequency-Response Control Functions at Terminal Level in Over-Frequency Events
7. Application Case of the Methodology to the Considered MTDC + Onshore AC Grid
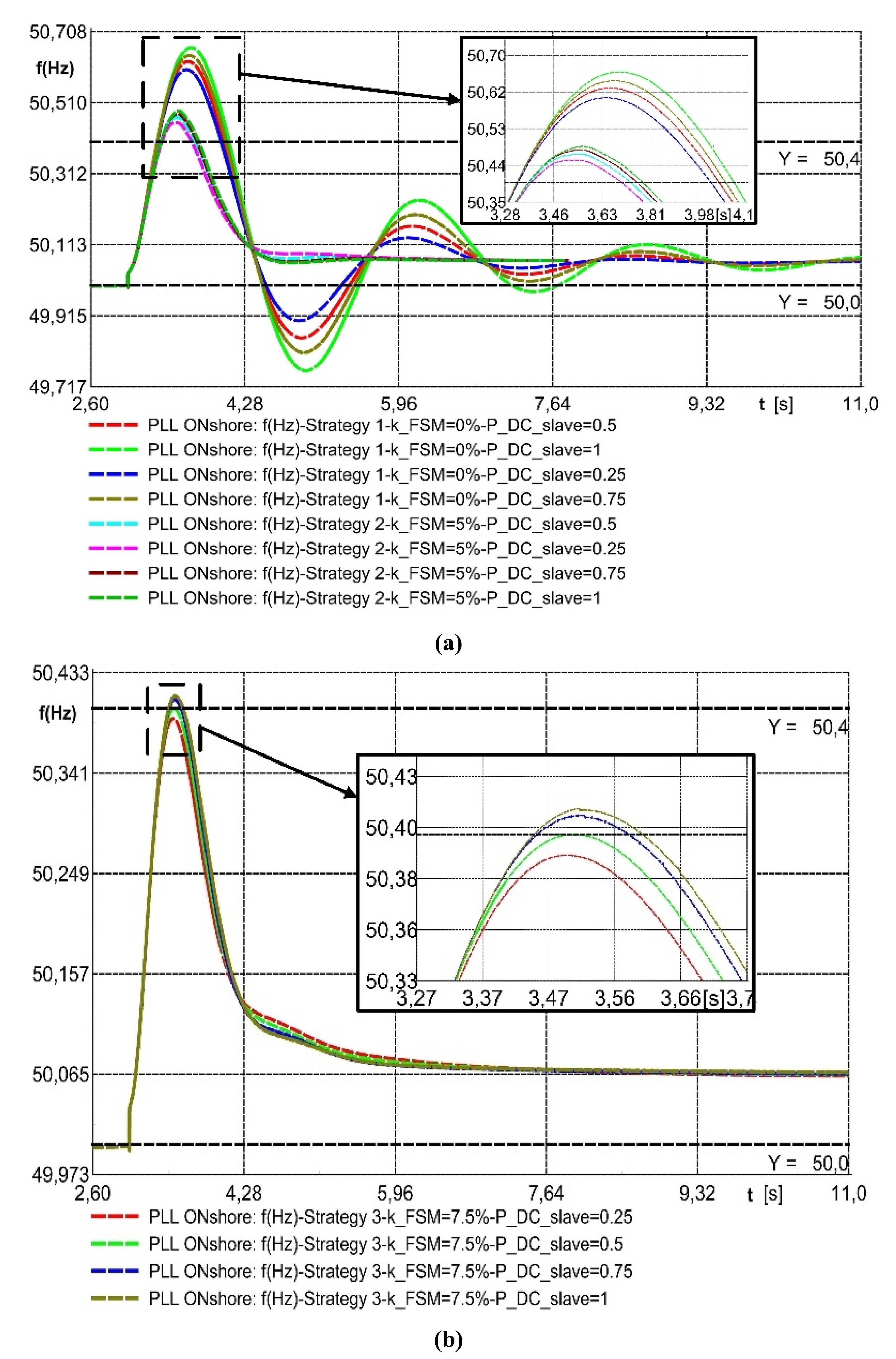
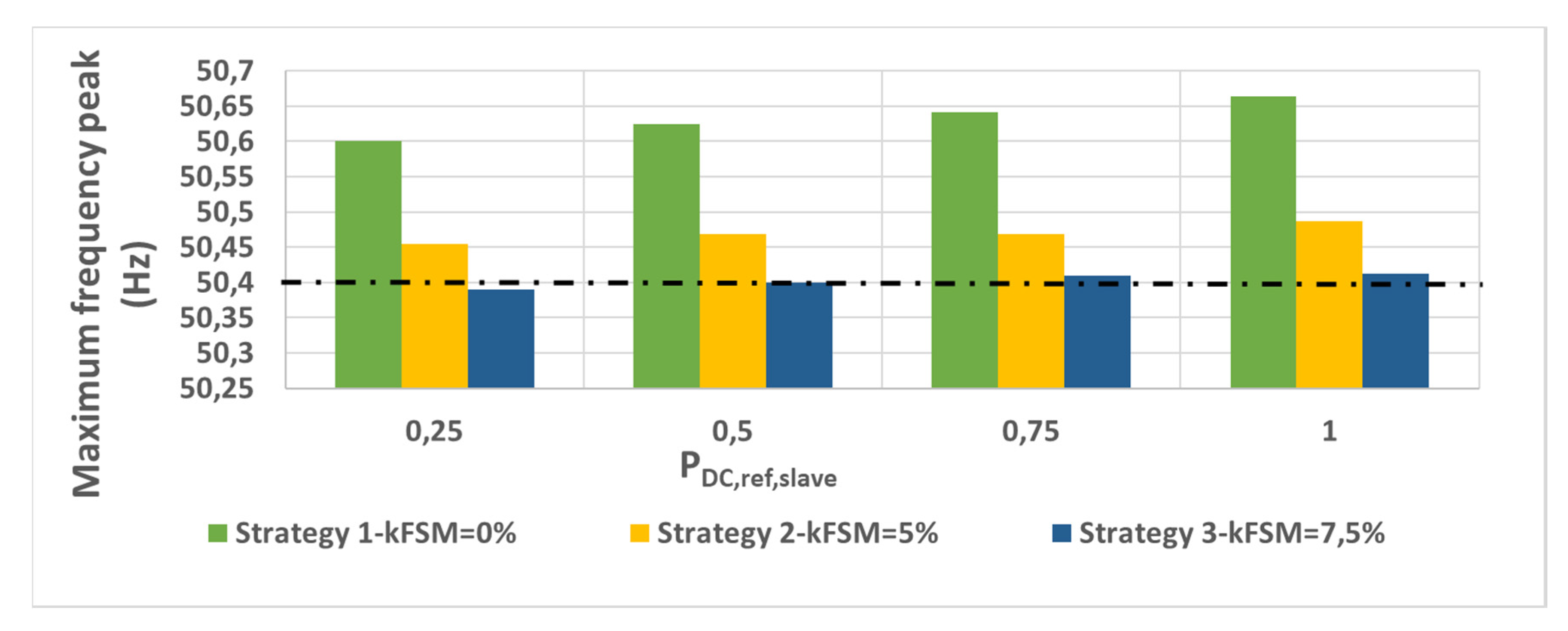
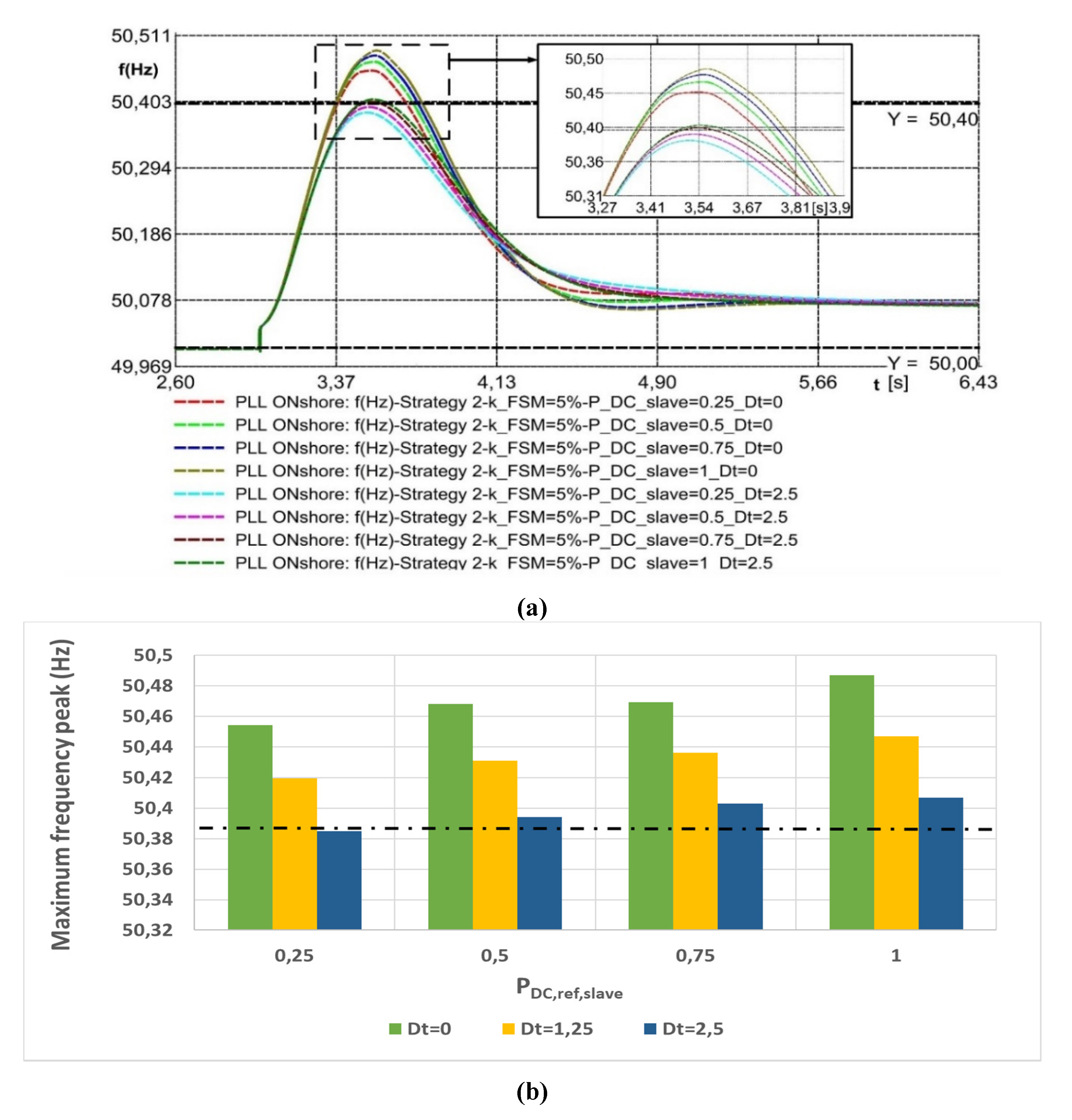
7.1. Impact of Tuning Strategies on the Reduction of the Frequency Peak
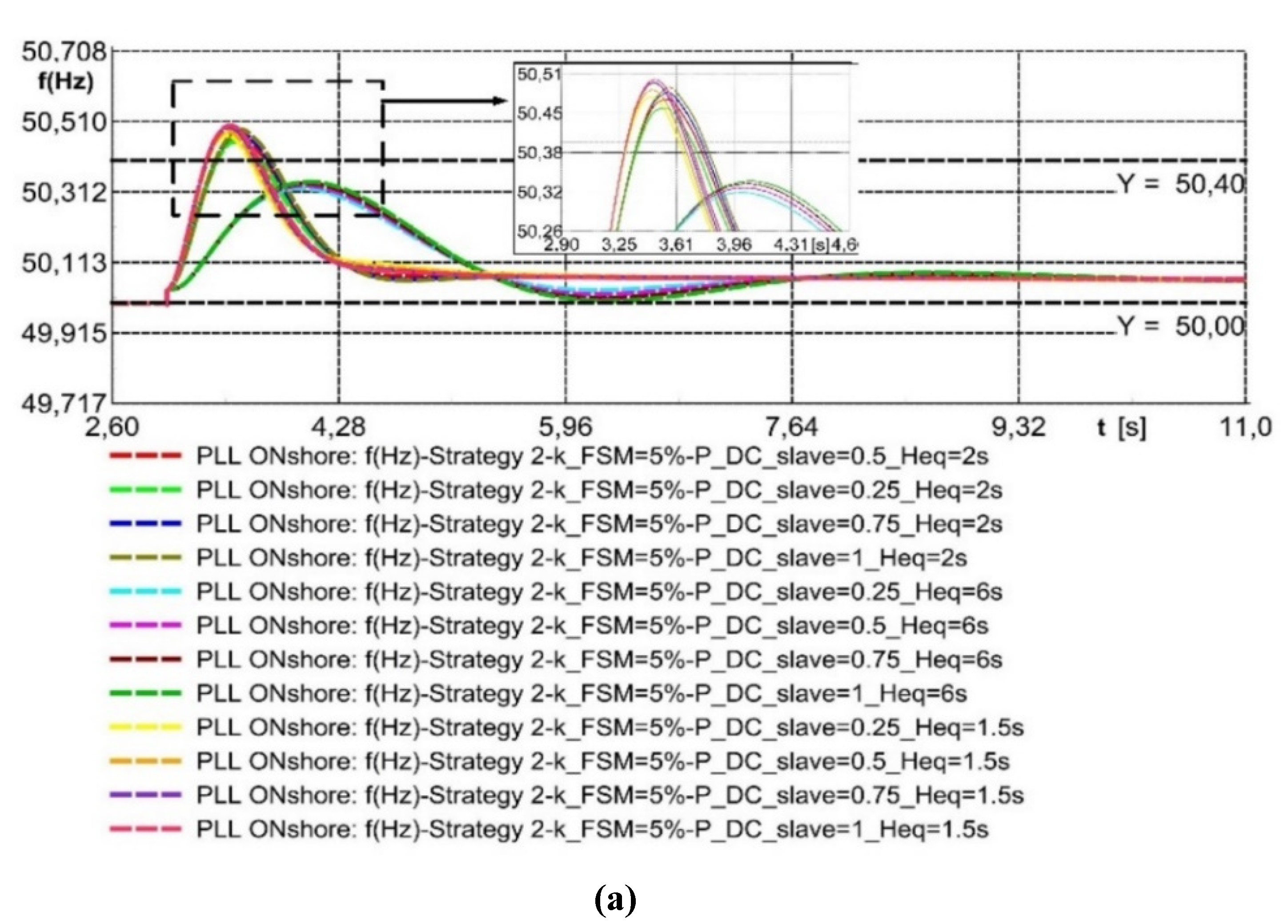
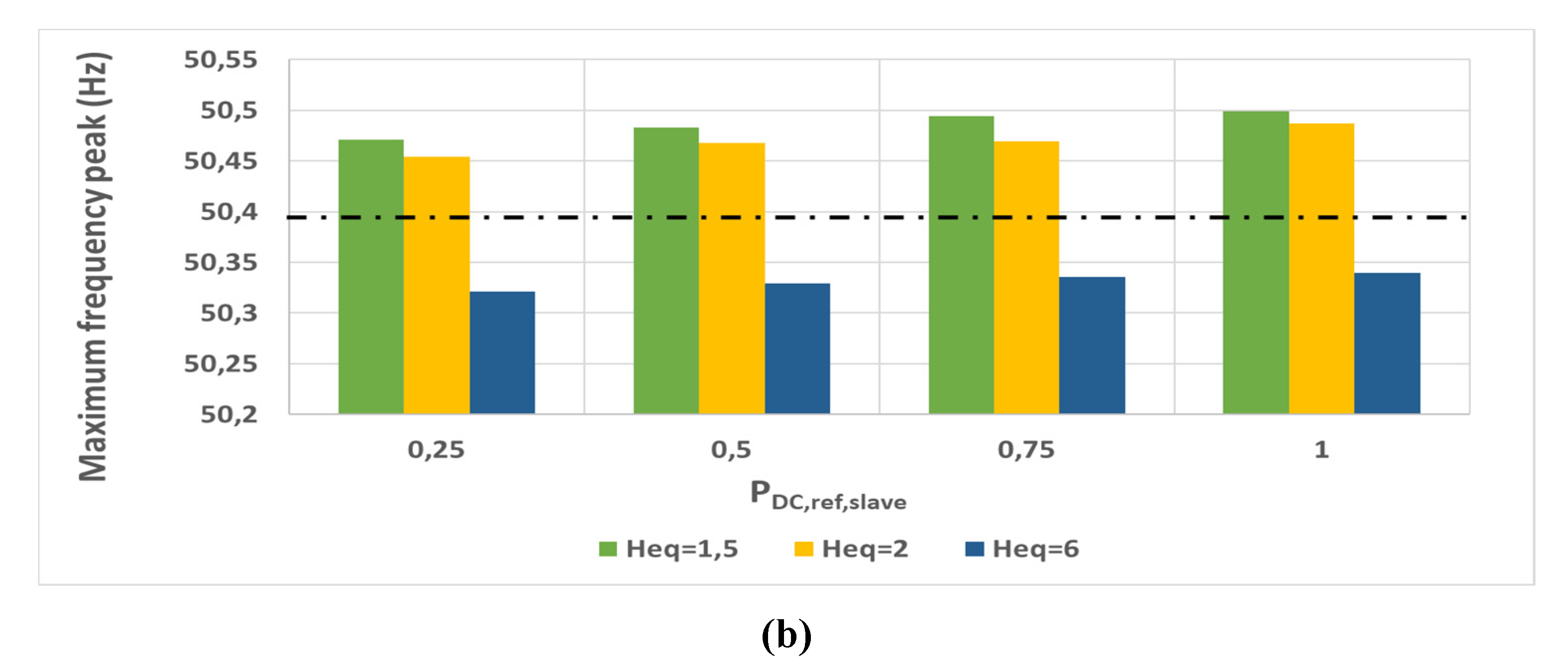
7.2. Guidance for Tuning kFSM and PDC,ref,slave when Different MTDC Control Structure and Synchronous Generator Characteristics Are Considered
8. Conclusions
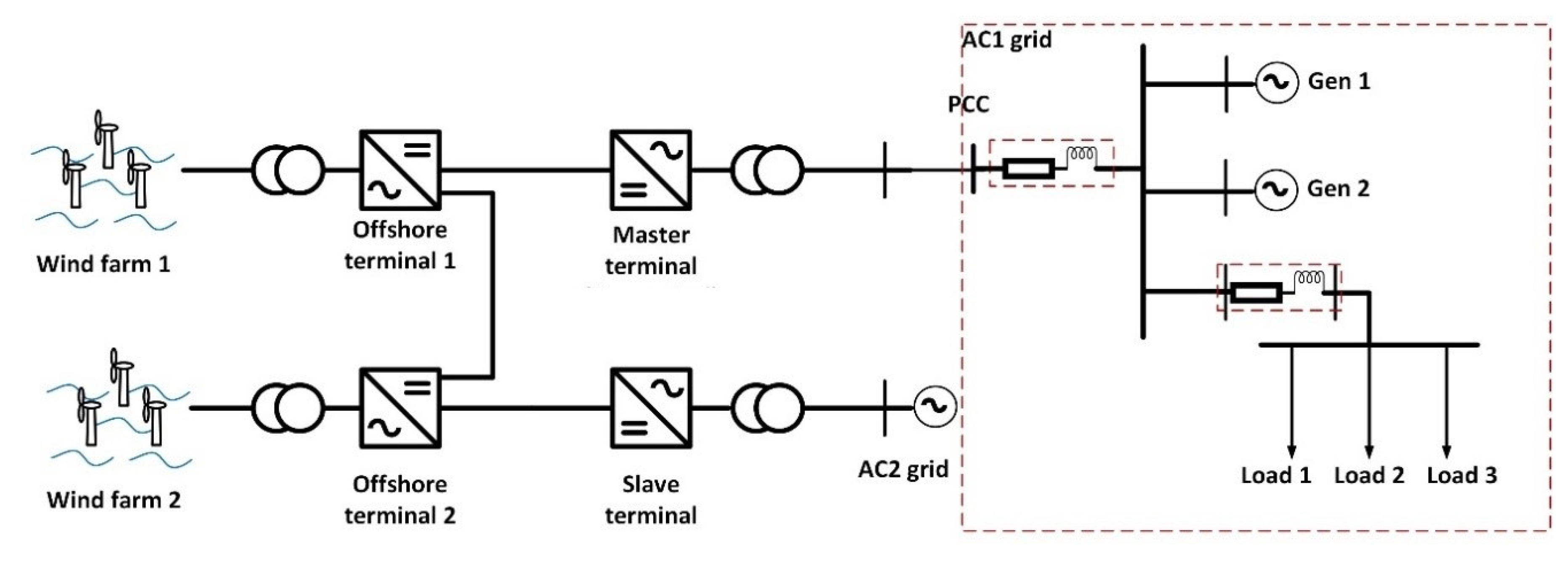
- First, the combination of a coordinated frequency control structure with a centralised master–slave scheme to operate a MTDC grid implemented to ensure the proper share the distribution of power set points, while at the same time, comply with the considered grid code.
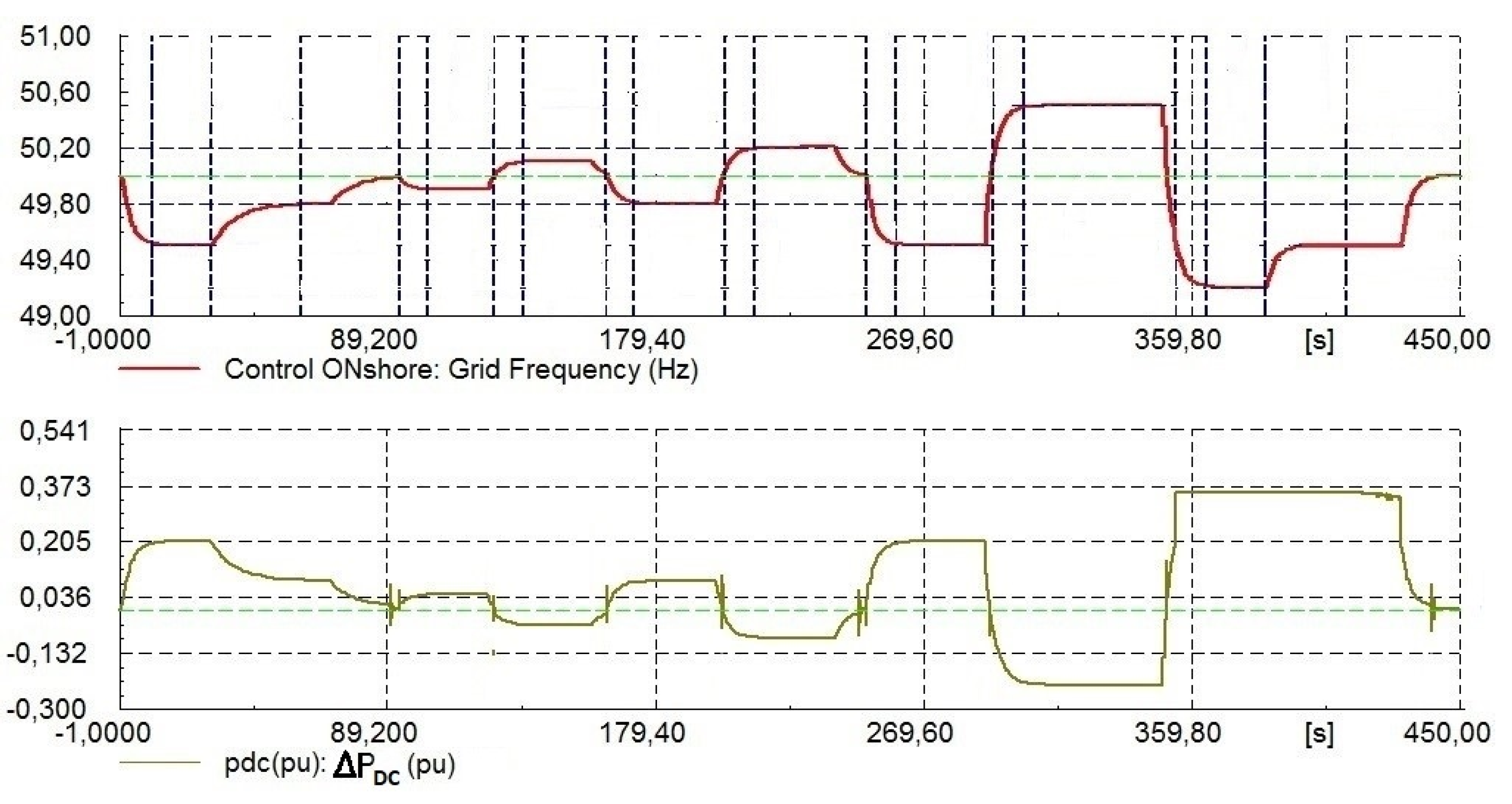
- The comparison between control responses with and without this kFSM frequency-response function shows the benefit of having it implemented, i.e., the reduction of transient frequency oscillation amplitude.
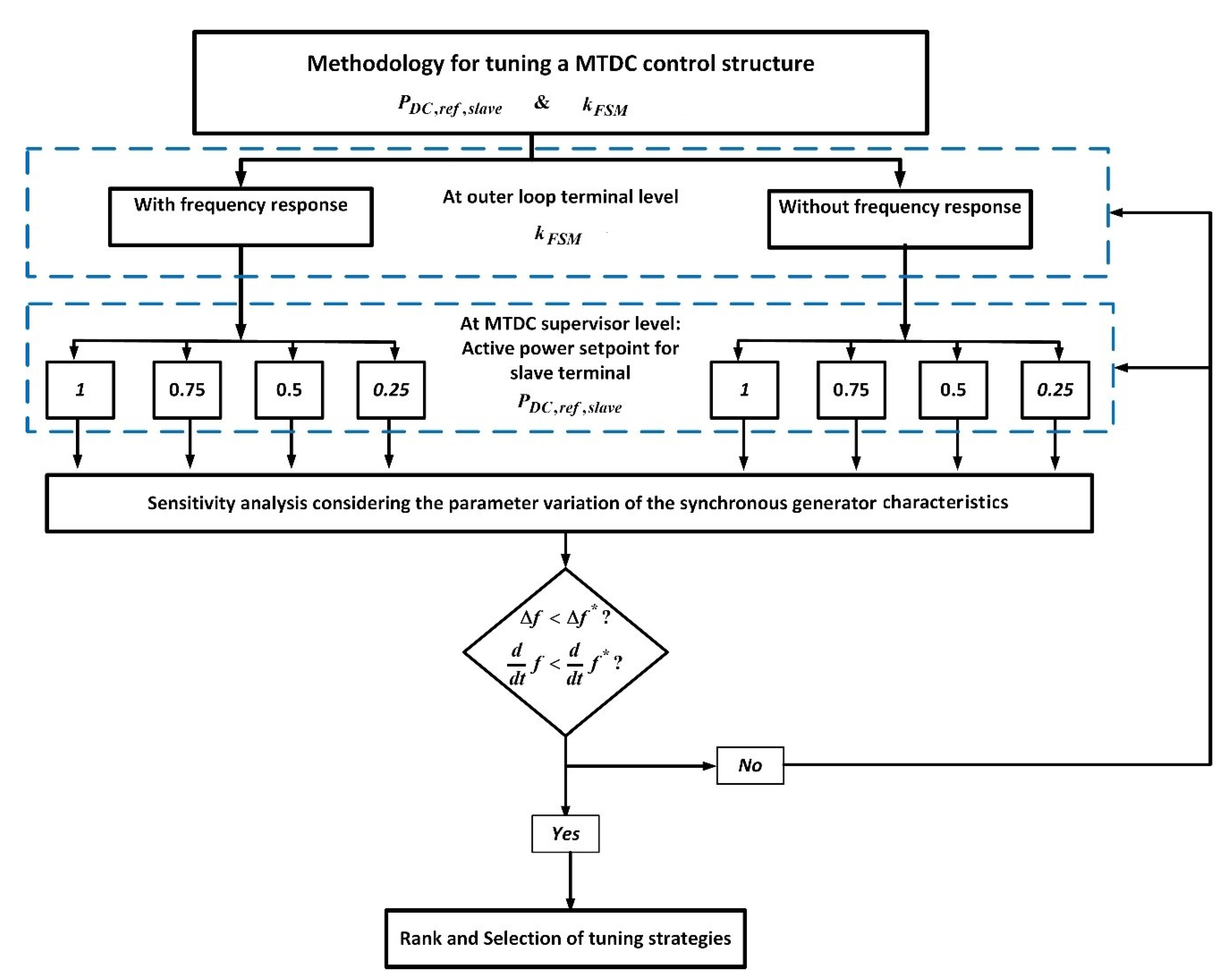
- The strategies which use PDC,ref,slave = 1 are less preferable than those with PDC,ref,slave < 1, but can also achieve great frequency peak and slope reductions if an adequate kFSM is tuned.
- The DC power reference for the slave terminal plays an important role in smoothing the frequency peak value but the role of kFSM at terminal level has a larger influence in reducing the frequency peak value.
- For a given DC power reference at the slave terminal, a higher kFSM, e.g., 5%, is advised over lower values, and this guarantees the stability of the system at each moment and presents first order behaviour; or even 7.5%, as it bounds the frequency signal out of the LFSM compulsory area for certain PDC,ref,slave values.
- For a given kFSM value, it is advisable to have the lowest PDC,ref,slave value at the slave terminal, as 0.25 was demonstrated to be the set point which most reduces the frequency peak.
- Besides, guidance is given on how to select the kFSM value, if the control structure of the MTDC grid is changed. If, for example a distributed control structure was considered, more moderate values for kFSM are recommended.
- Additionally, a sensitivity analysis is performed to give guidance on how to tune PDC,ref,slave and kFSM, considering variations in the equivalent inertia Heq and the damping, Dt. According to these deviations, the frequency peak values may vary, and thus the strategies have to be redefined if their derived peak reduction is not sufficient. Therefore, for large Heq values, a smaller kFSM value than 5% could also provoke reductions in the peak, while PDC,ref, slave is kept to a minimum. For lower Heq values, a substantially greater kFSM value would be needed, in order to achieve greater peak reductions. Furthermore, for a null Dt value, a greater kFSM value than 5% has a great influence in achieving peak reductions in a more efficient way than PDC,ref, slave. However, for greater Dt values, just by maintaining a low PDC,ref, slave value, the peak reduction is easily obtained, without the need for increasing the kFSM slope.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Apparent nominal power | 1800 MVA |
| Nominal AC voltage | 400 kV |
| Power factor | 0.8 |
| Inertia constant (2Heq) | 4 s |
| Synchronous reactances (xd = xq) | 2 p.u. |
| Stator resistance | 0 p.u. |
| Stator reactance | 0.1 p.u. |
| Rotor mutual reactances (xrld = xrlq) | 0 p.u. |
| Transient time constants (Td′ = Tq′) | 6 s |
| Transient reactances (xd′ = xq′) | 0.25 s |
| Sub-transient time constants (Td″ = Tq″) | 0.018 s |
| Sub-transient reactances (xd″ = xq″) | 0.16 s |
| Filter delay time (Tb) | 10 s |
| Filter derivative time constant (Ta) | 2 s |
| Governor gain constant (Keq) | 100 p.u. |
| Exciter time constant (Te) | 0.5 s |
| Turbine power coefficient (At) | 1 p.u. |
| Frictional losses (Dt) | 0 p.u. |
| Controller droop (Rdroop) | 0.01 p.u. |
| Governor time constant (Teq) | 5 s |
| Name | Value |
|---|---|
| Proportional constant-reactive power control (Kq) | 0.4 p.u. |
| Time constant-reactive power control (Tq) | 0.01 s |
| Filter time constant–DC voltage (TrVDC) | 0.01 s |
| Filter time constant–reactive power (Trq) | 0.02 s |
| Filter time constant–AC voltage (Trq) | 0.02 s |
| Dead band droop AC voltage | 0.005 p.u. |
| AC voltage setpoint (VAC,ref) | 1 p.u. |
| Proportional constant–DC voltage control (Kv) | 15 p.u. |
| Time constant–DC voltage control (Tv) | 0.05 s |
| Integral constant–proportional resonant control (Ki) | 5000 |
| Proportional constant–proportional-resonant control (Kp) | 1.5 |
| Resonant angular frequency–proportional resonant control (ω) | 314.159 |
| Name | Value |
|---|---|
| Reactive power control constant (Kq) | 0.4 p.u. |
| Filter time constant–reactive power control (Trq) | 0.02 s |
| Filter time constant–DC voltage (Trudc) | 0.01 s |
| Filter time constant–active power (Trp) | 0.02 s |
| Filter time constant–AC voltage (Truac) | 0.02 s |
| AC voltage setpoint (VAC,ref) | 1 p.u. |
| Active power control constant (Kp) | 0.5 p.u. |
| Time constant–active power control (Tp) | 0.02 s |
| DC voltage setpoint (VDC,ref) | 1 p.u. |
| Name | Value |
|---|---|
| Proportional constant–AC voltage control (KAC) | 1 |
| Time constant–AC voltage control (TAC) | 0.01 s |
| Filter time constant–DC voltage (TrVDC) | 0.01 s |
| Filter time constant–AC voltage control (TrAC) | 0.005 s |
| DC voltage dead band | 0.03 s |
| DC voltage setpoint (VDC,ref) | 1 p.u. |
References
- Etxegarai, A.; Eguia, P.; Torres, E.; Buigues, G.; Iturregi, A. Current procedures and practices on grid code compliance verification of renewable power generation. Renew. Sustain. Energy Rev. 2017, 71, 191–202. [Google Scholar] [CrossRef]
- ENTSOE. High Voltage Direct Current Connections. Available online: https://www.entsoe.eu/network_codes/hvdc/ (accessed on 14 April 2020).
- Fein, F.; Borecki, J.; Groke, H.; Orlik, B. Decentral control of multi-terminal HVDC systems with automatic exchange of instantaneous and primary reserve power across AC grids. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–8. [Google Scholar]
- Andreasson, M.; Wiget, R.; Dimarogonas, D.V.; Johansson, K.H.; Andersson, G. Distributed primary frequency control through multi-terminal HVDC transmission systems. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5029–5034. [Google Scholar]
- Cao, J.; Du, W.; Wang, H.F.; Bu, S.Q. Minimization of Transmission Loss in Meshed AC/DC Grids with VSC-MTDC Networks. IEEE Trans. Power Syst. 2013, 28, 3047–3055. [Google Scholar] [CrossRef]
- Nanou, S.; Tzortzopoulos, O.; Papathanassiou, S. Evaluation of DC voltage control strategies for multi-terminal HVDC grids comprising island systems with high RES penetration. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015; pp. 1–7. [Google Scholar]
- Larrode, M.H.; Temez, Í.V.; Recio, S.C.; Mugica, M.S.; Lopez, P.E. Integral control of a Multi-Terminal HVDC-VSC transmission system. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11 April 2017; pp. 1–15. [Google Scholar]
- Haileselassie, T.M.; Uhlen, K. Primary frequency control of remote grids connected by multi-terminal HVDC. In Proceedings of the IEEE PES General Meeting, Montreal, QC, Canada, 2–6 August 2010; pp. 1–6. [Google Scholar]
- Zeni, L.; Morgans, I.; Hansen, A.D.; Serensen, P.E.; Kjœr, P.C. Generic models of wind turbine generators for advanced applications in a VSC-based offshore HVDC network. In Proceedings of the 10th IET International Conference on AC and DC Power Transmission (ACDC 2012), Birmingham, UK, 4–5 December 2012; pp. 1–6. [Google Scholar]
- Phulpin, Y. Communication-Free Inertia and Frequency Control for Wind Generators Connected by an HVDC-Link. IEEE Trans. Power Syst. 2012, 27, 1136–1137. [Google Scholar] [CrossRef]
- Sakamuri, J.N.; Altin, M.; Hansen, A.D.; Cutululis, N.A.; Rather, Z.H. Coordinated control scheme for ancillary services from offshore wind power plants to AC and DC grids. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Silva, B.; Moreira, C.L.; Seca, L.; Phulpin, Y.; Lopes, J.A.P. Provision of Inertial and Primary Frequency Control Services Using Offshore Multiterminal HVDC Networks. IEEE Trans. Sustain. Energy 2012, 3, 800–808. [Google Scholar] [CrossRef]
- Sanz, I.M.; Chaudhuri, B.; Strbac, G. Inertial response from offshore wind farms connected through DC grids. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1518–1527. [Google Scholar]
- Holttinen, H.; Ivanova, A.; Dominguez, J.L. Wind power in markets for frequency support services. In Proceedings of the 2016 13th International Conference on the European Energy Market (EEM), Porto, Portugal, 6–9 June 2016; pp. 1–5. [Google Scholar]
- Endegnanew, A.G.; Uhlen, K. Coordinated Converter Control Strategy in Hybrid AC/DC Power Systems for System Frequency Support. Energy Procedia 2016, 94, 173–181. [Google Scholar] [CrossRef][Green Version]
- Li, Y.; Xu, Z.; Ostergaard, J.; Hill, D.J. Coordinated Control Strategies for Offshore Wind Farm Integration via VSC-HVDC for System Frequency Support. IEEE Trans. Energy Convers. 2017, 32, 843–856. [Google Scholar] [CrossRef]
- Wang, W.; Beddard, A.; Barnes, M.; Marjanovic, O. Analysis of Active Power Control for VSC–HVDC. IEEE Trans. Power Deliv. 2014, 29, 1978–1988. [Google Scholar] [CrossRef]
- Haro-Larrode, M.; Santos-Mugica, M.; Etxegarai, A.; Eguia, P. Integration of offshore wind energy into an island grid by means of a Multi-Terminal VSC-HVDC network. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–6. [Google Scholar]
- National Grid. The Grid Code. 2017. Available online: https://www.nationalgrid.com/sites/default/files/documents/8589935310-Complete%20Grid%20Code.pdf (accessed on 15 April 2020).
- National Grid Guidance Note—DC Converter Stations. 2015. Available online: https://www.nationalgrid.com/sites/default/files/documents/44219-Guidance%20Notes%20-%20DC%20Converter%20Stations%20Issue%201.pdf (accessed on 15 April 2020).
- National Grid. The Grid Code. 2019. Available online: https://www.nationalgrideso.com/document/33821/download (accessed on 15 April 2020).
- Karaagac, U.; Mahseredjian, J.; Cai, L.; Saad, H. Offshore Wind Farm Modeling Accuracy and Efficiency in MMC-Based Multiterminal HVDC Connection. IEEE Trans. Power Deliv. 2017, 32, 617–627. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Y.; Duan, G.; Hu, W.; Wang, W.; Chen, Z. An Improved Droop Control Method for Multi-Terminal VSC-HVDC Converter Stations. Energies 2017, 10, 843. [Google Scholar] [CrossRef]
- Adeuyi, O.D.; Cheah-Mane, M.; Liang, J.; Jenkins, N.; Wu, Y.; Li, C.; Wu, X. Frequency support from modular multilevel converter based multi-terminal HVDC schemes. In Proceedings of the 2015 IEEE Power Energy Society General Meeting, Denver, CO, USA, 26–32 July 2015; pp. 1–5. [Google Scholar]
- Chaudhuri, N.R.; Majumder, R.; Chaudhuri, B. System Frequency Support Through Multi-Terminal DC (MTDC) Grids. IEEE Trans. Power Syst. 2013, 28, 347–356. [Google Scholar] [CrossRef]
- Meng, J.; Mu, Y.; Jia, H.; Wu, J.; Yu, X.; Qu, B. Dynamic frequency response from electric vehicles considering travelling behavior in the Great Britain power system. Appl. Energy 2016, 162, 966–979. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Egido, I.; Fernandez-Bernal, F.; Centeno, P.; Rouco, L. Maximum Frequency Deviation Calculation in Small Isolated Power Systems. IEEE Trans. Power Syst. 2009, 24, 1731–1738. [Google Scholar] [CrossRef]
- ENTSO-E. Appendix 1. Load-Frequency Control and Performance. 2004. Available online: https://www.entsoe.eu/fileadmin/user_upload/_library/publications/entsoe/Operation_Handbook/Policy_1_Appendix%20_final.pdf (accessed on 15 April 2020).













| Strategies | kFSM | PDC,ref,slave | |||
|---|---|---|---|---|---|
| Strategy 1 | 0% | 0.25 | 0.5 | 0.75 | 1 |
| Strategy 2 | 5% | ||||
| Strategy 3 | 7.5% | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haro-Larrode, M.; Santos-Mugica, M.; Etxegarai, A.; Eguia, P. Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events. Energies 2020, 13, 2807. https://doi.org/10.3390/en13112807
Haro-Larrode M, Santos-Mugica M, Etxegarai A, Eguia P. Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events. Energies. 2020; 13(11):2807. https://doi.org/10.3390/en13112807
Chicago/Turabian StyleHaro-Larrode, Marta, Maider Santos-Mugica, Agurtzane Etxegarai, and Pablo Eguia. 2020. "Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events" Energies 13, no. 11: 2807. https://doi.org/10.3390/en13112807
APA StyleHaro-Larrode, M., Santos-Mugica, M., Etxegarai, A., & Eguia, P. (2020). Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events. Energies, 13(11), 2807. https://doi.org/10.3390/en13112807