Observer-Based Sliding Mode Control to Improve Stability of Three-Phase LCL-Filtered Grid-Connected VSIs



Abstract
:1. Introduction
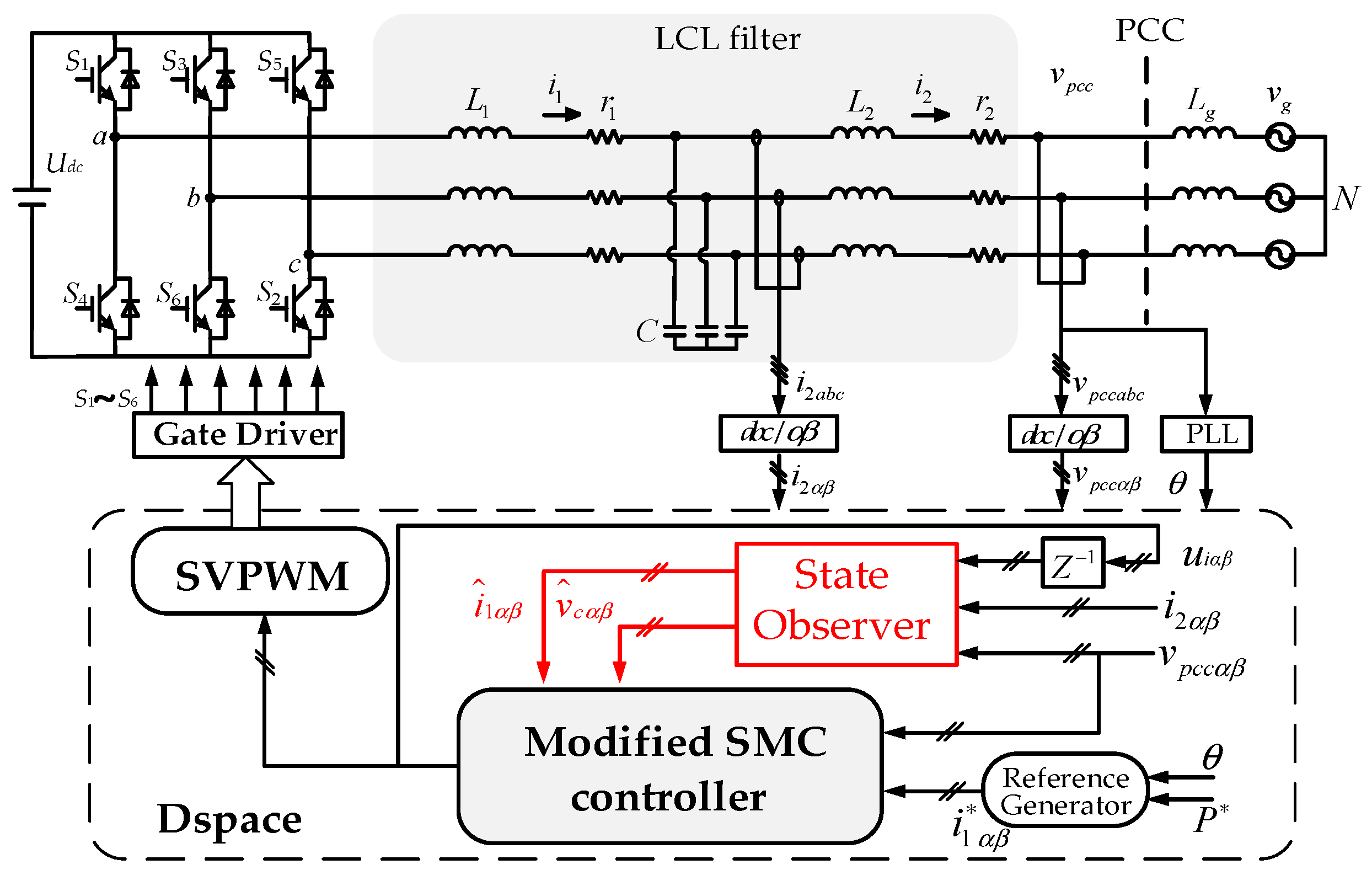
2. Modeling of a Three-Phase Grid-Connected VSI with an LCL Filter in αβ-Frame
3. Proposed Observer-Based Sliding Mode Control System
3.1. Basic SMC Controller
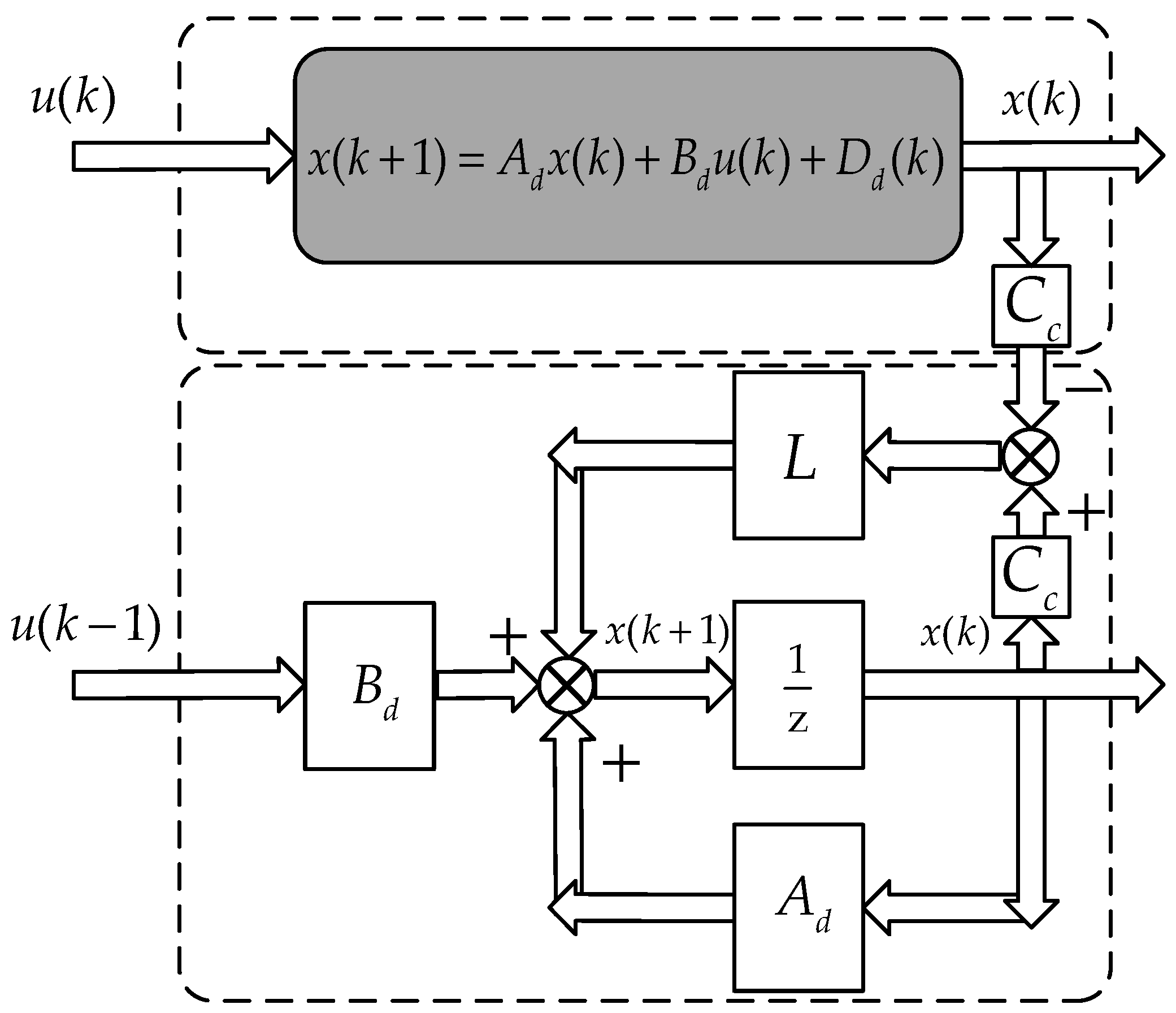
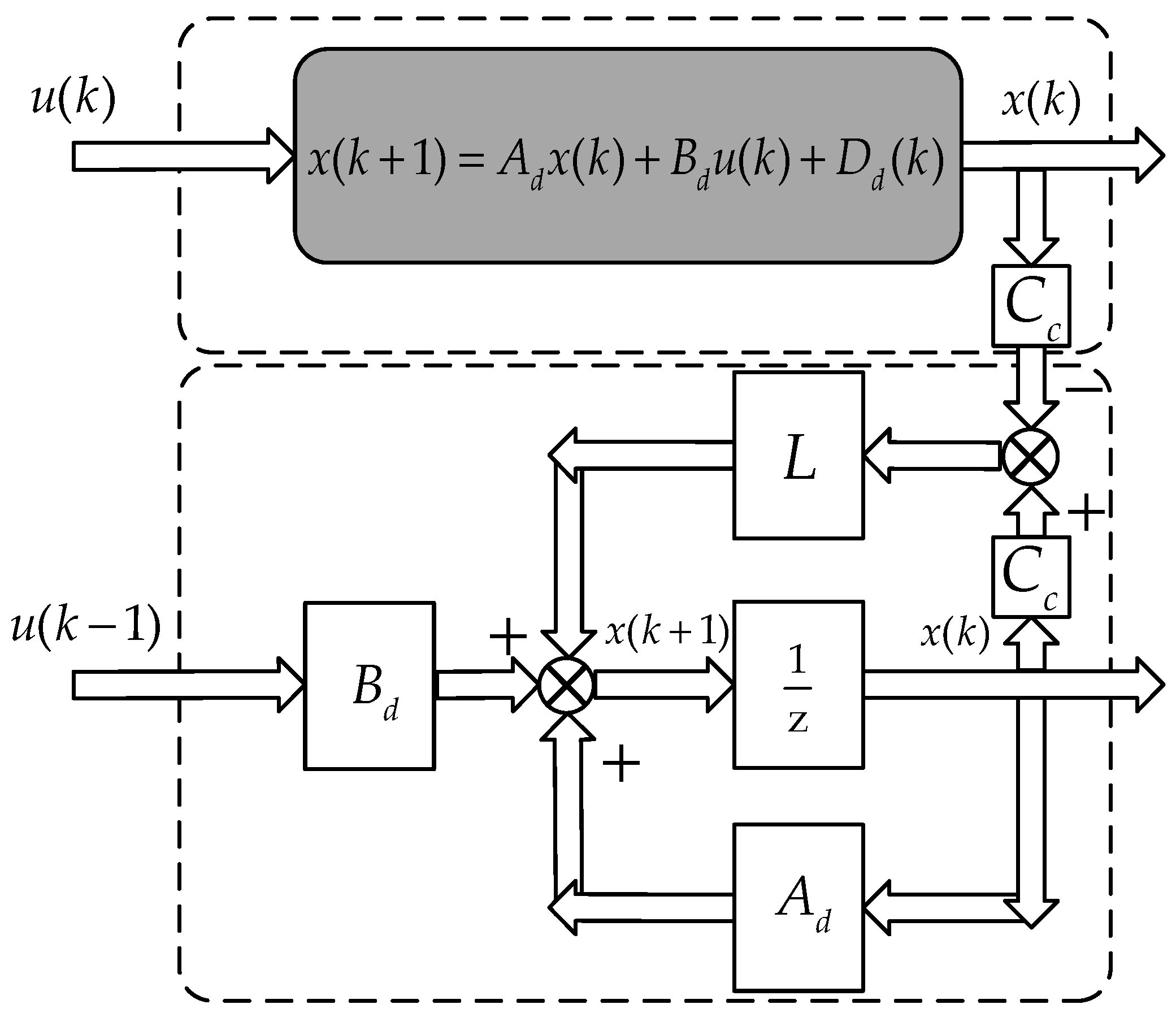
3.2. Discrete State Observer
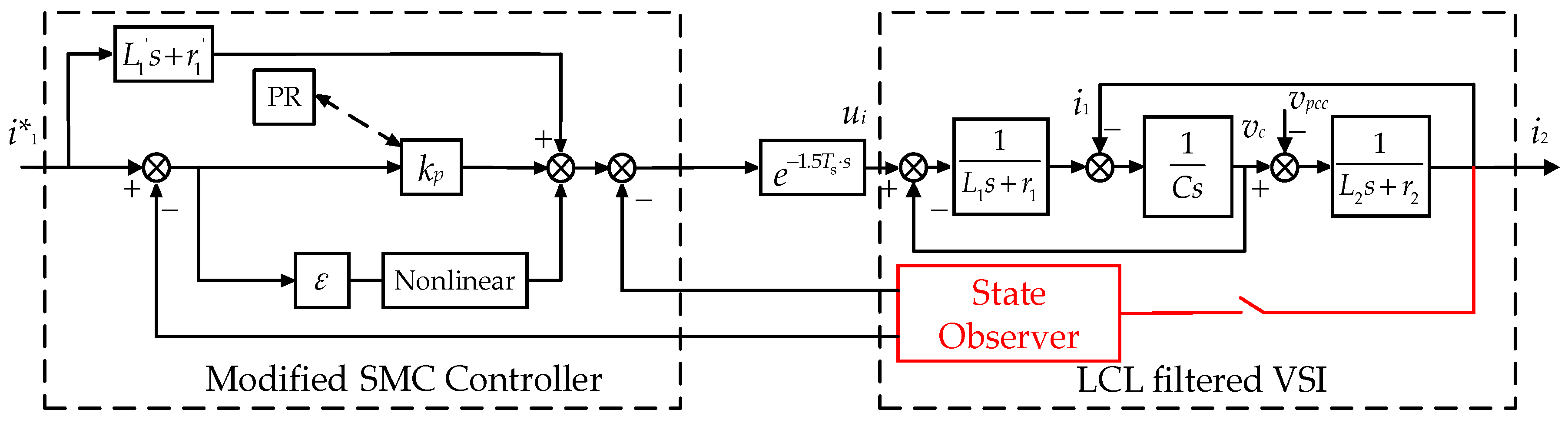
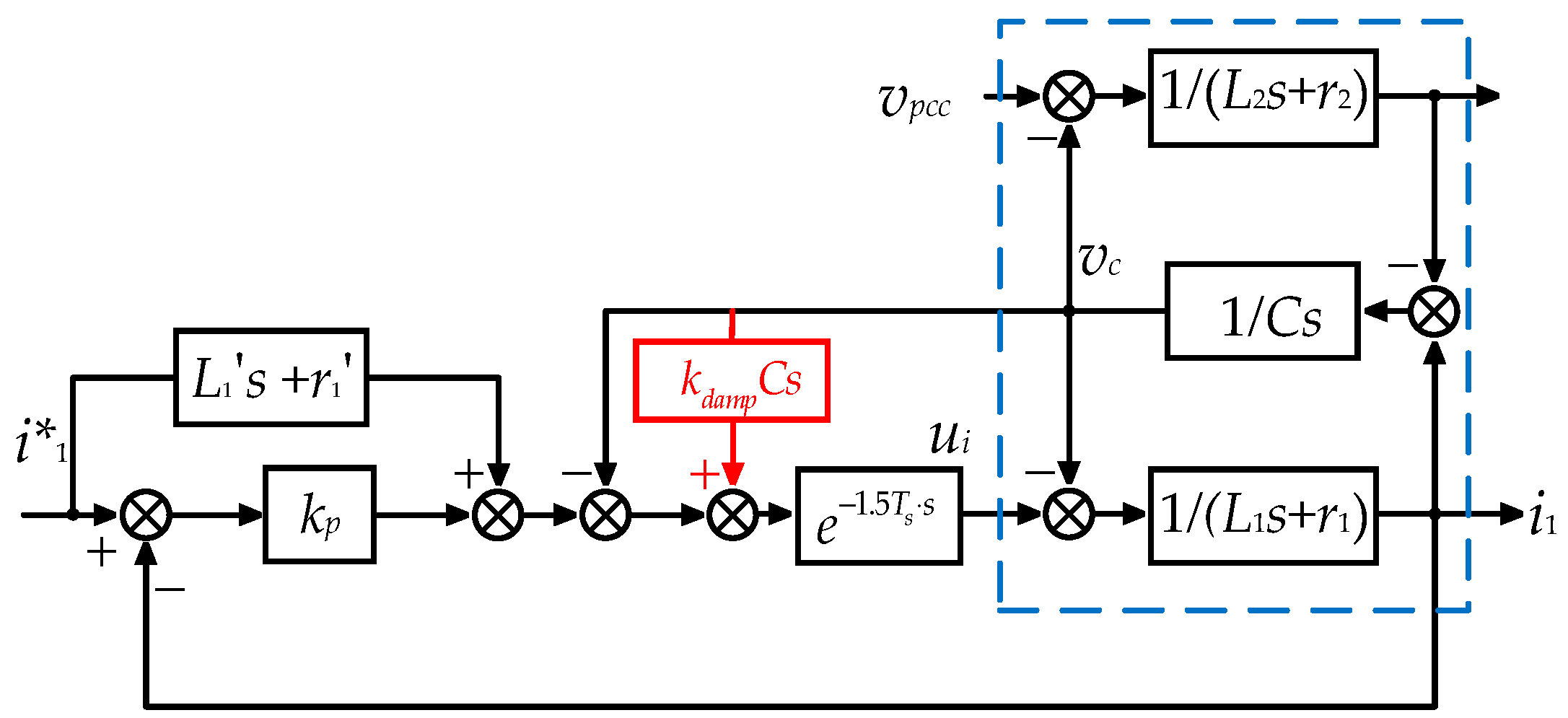
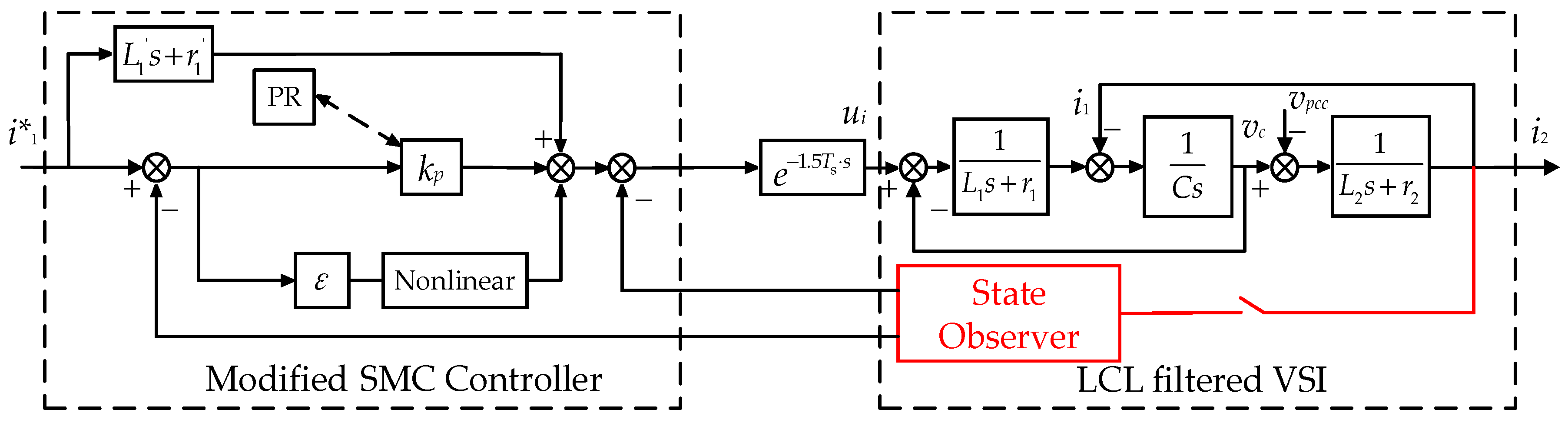
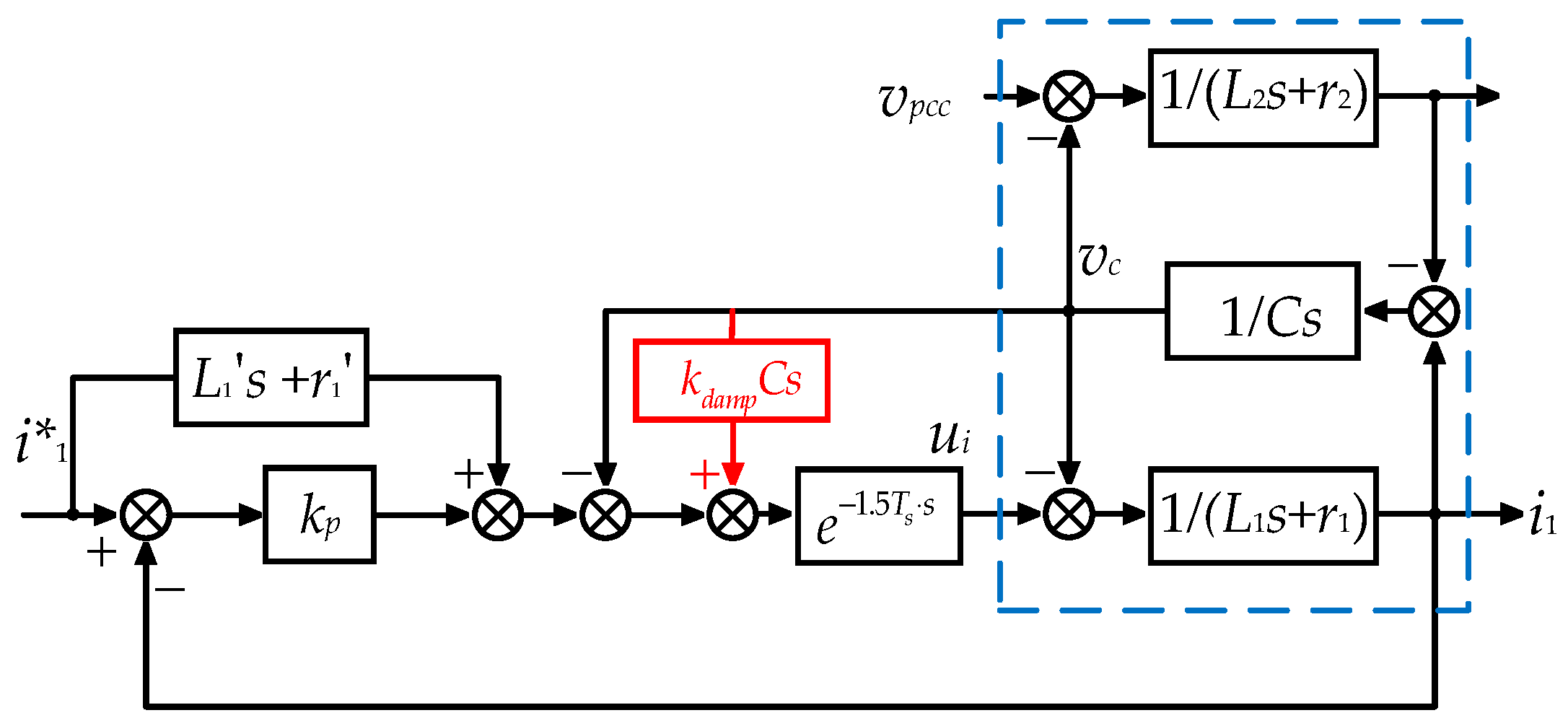
3.3. Modified SMC Controller with Active Damping
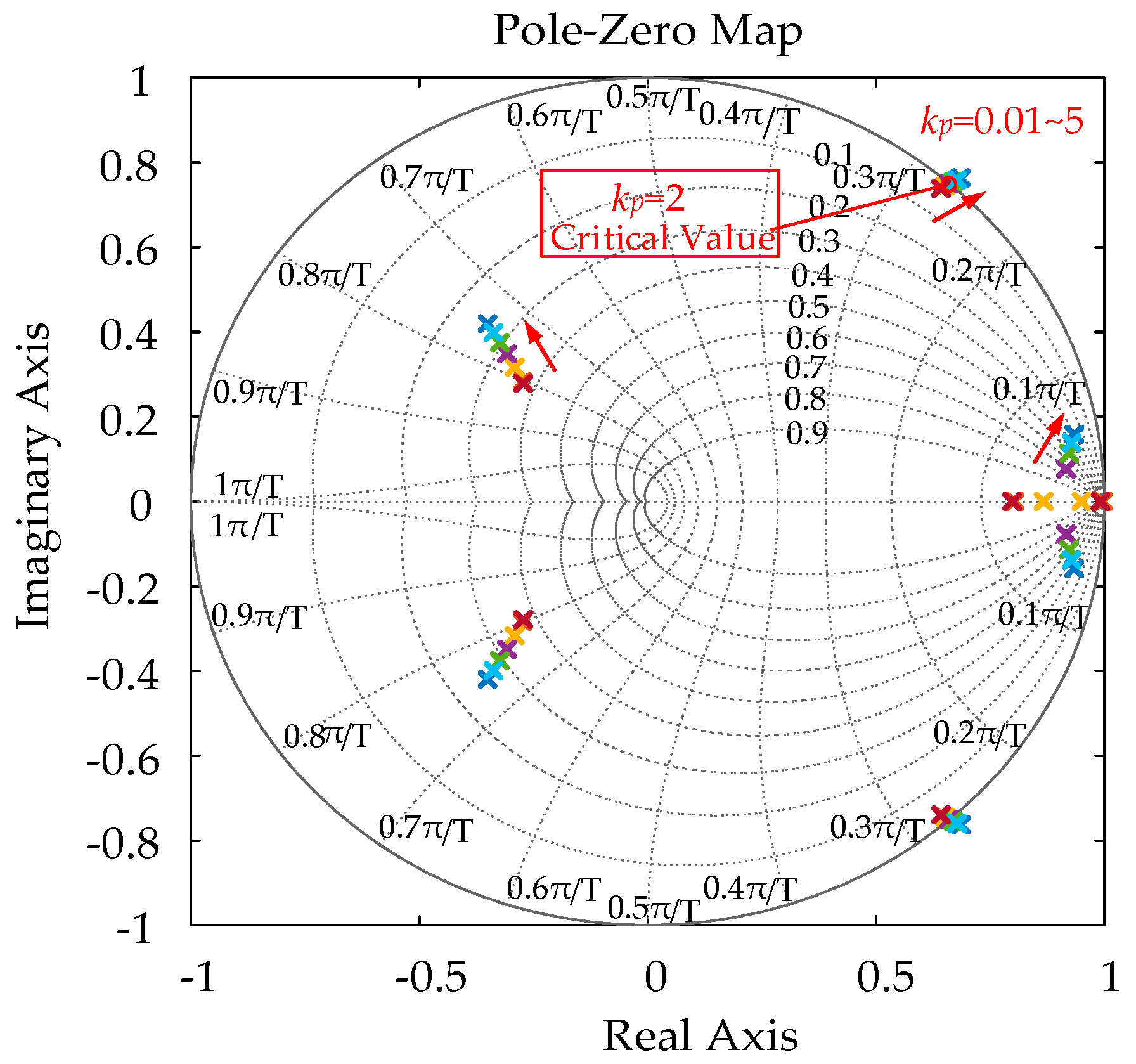
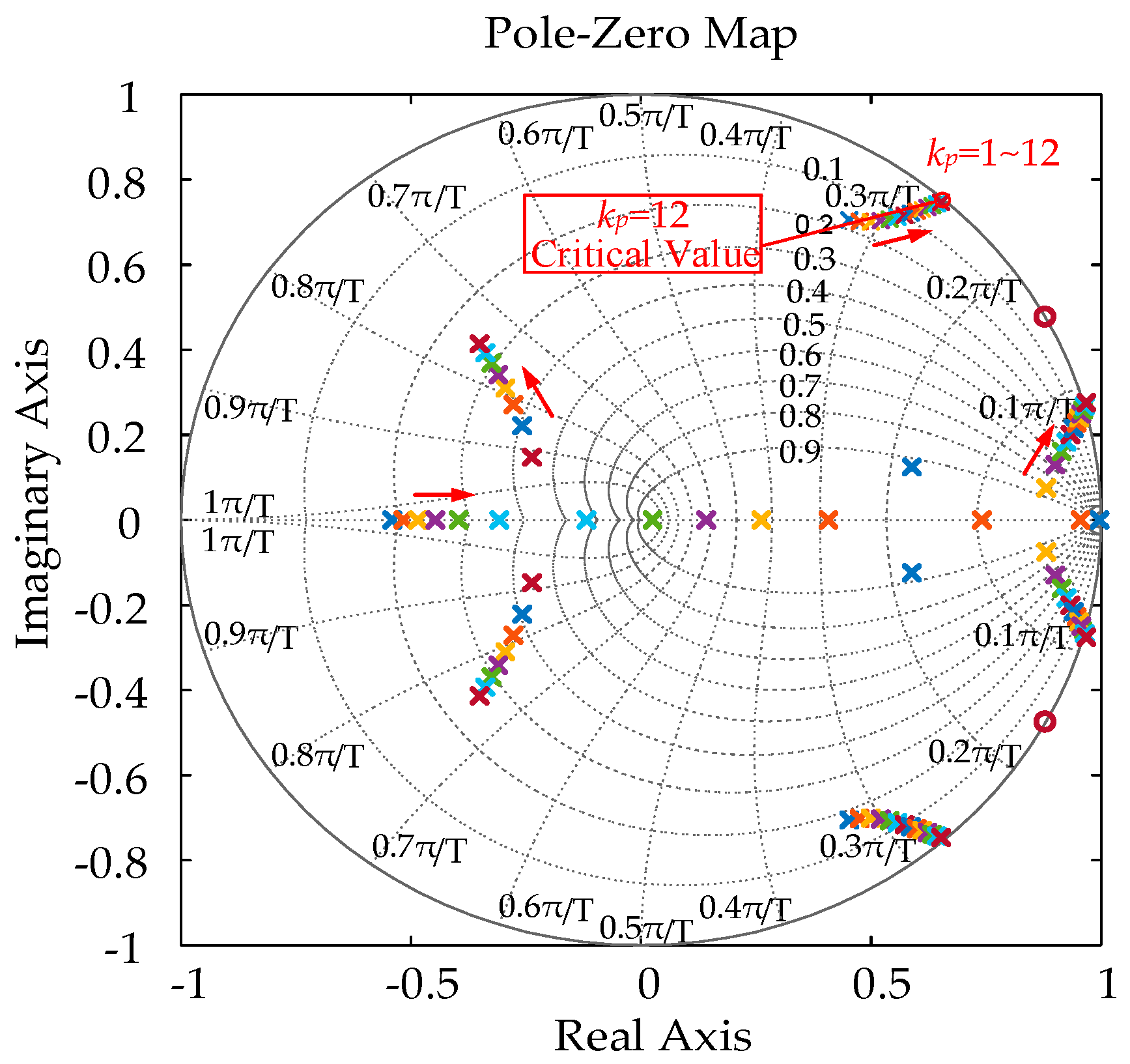
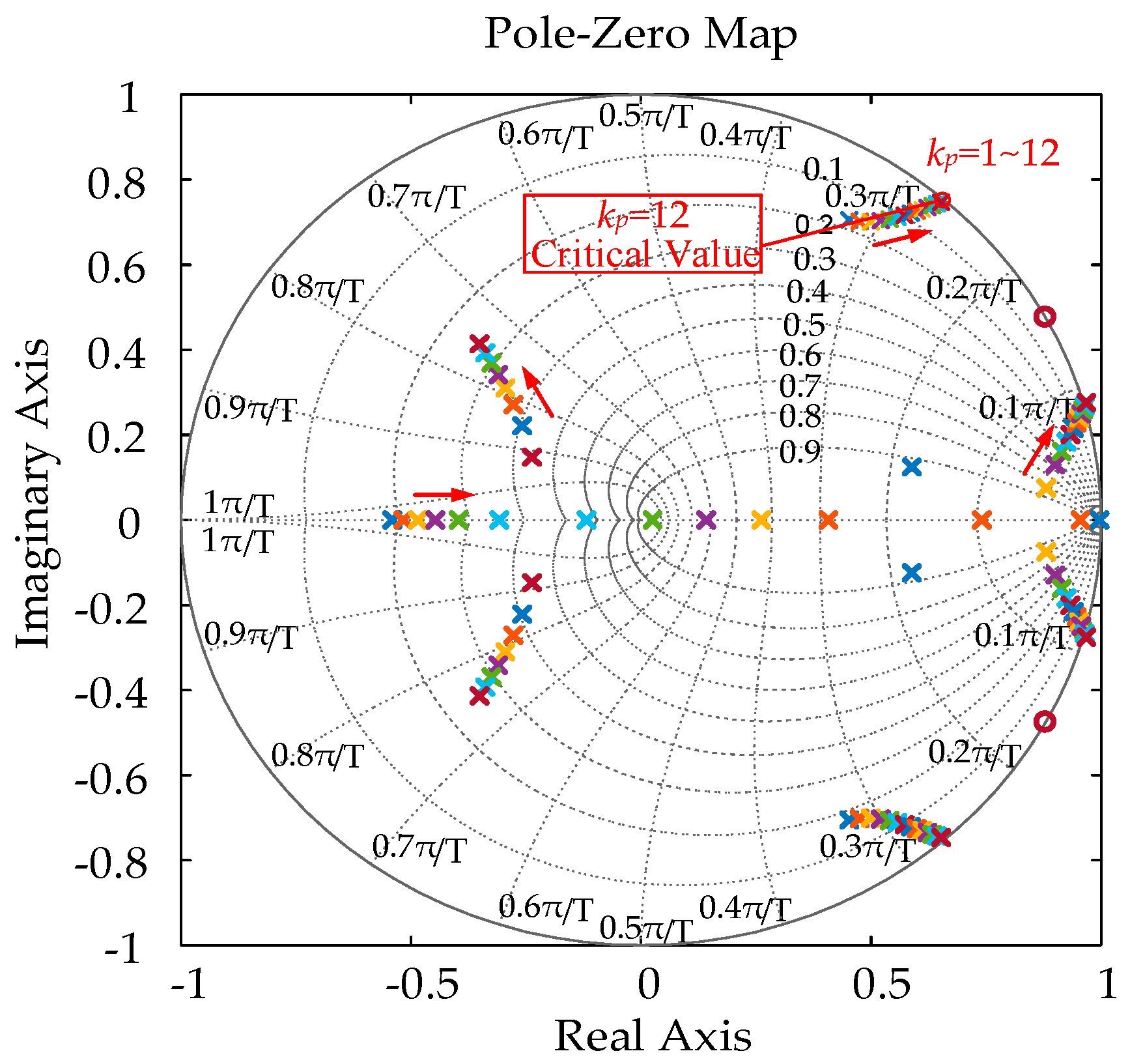
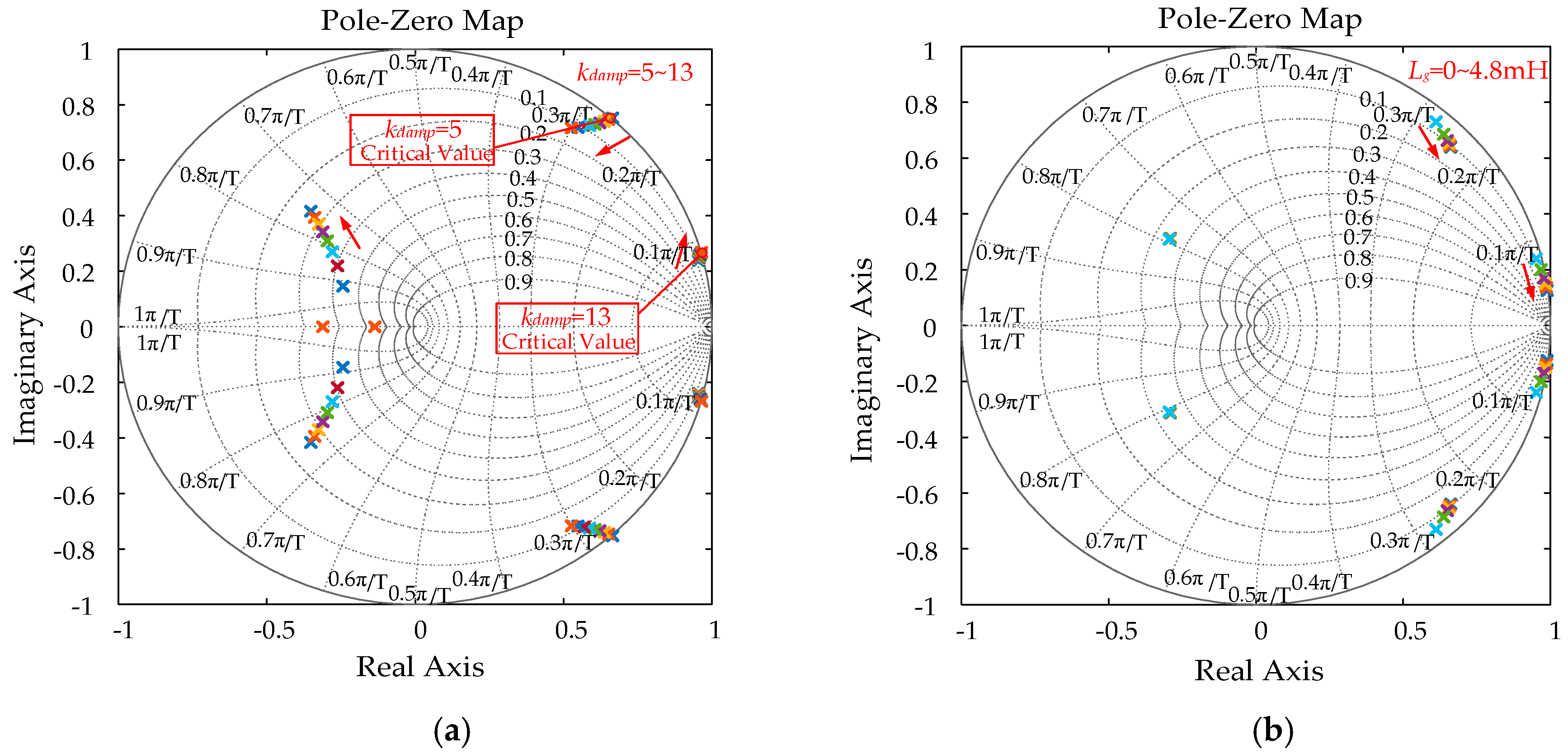
3.4. Stability Analysis
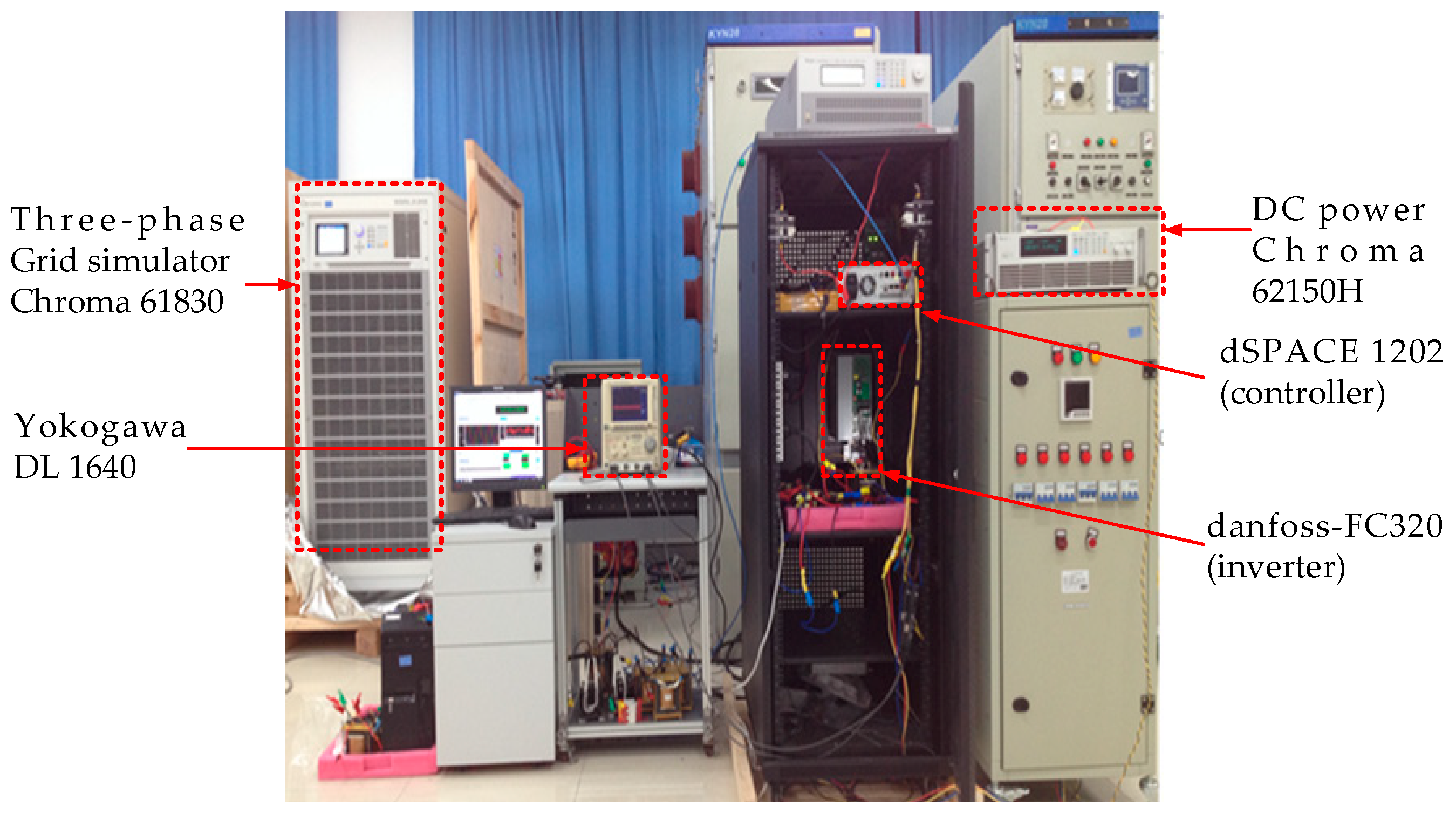
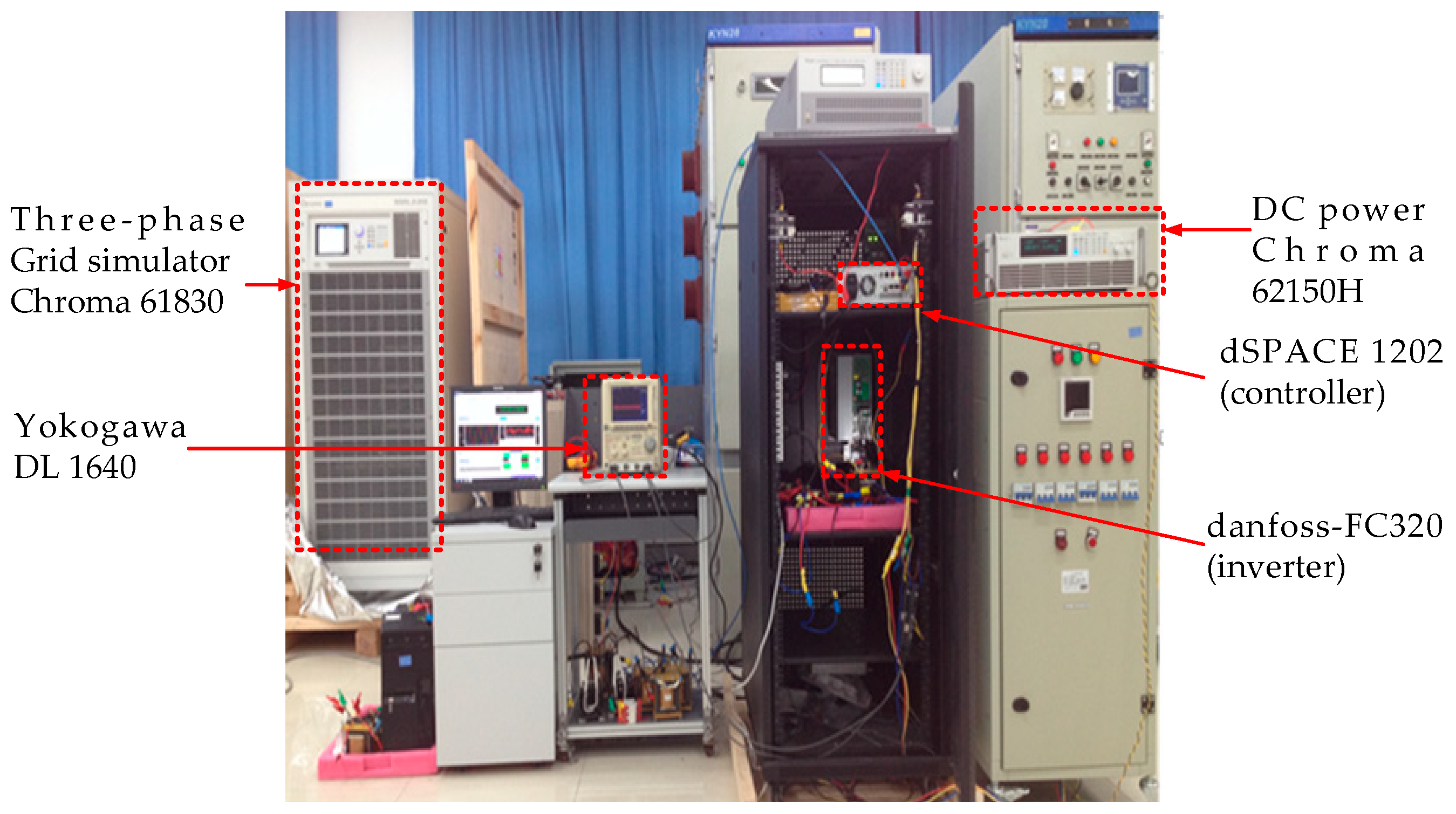
4. Experimental Results
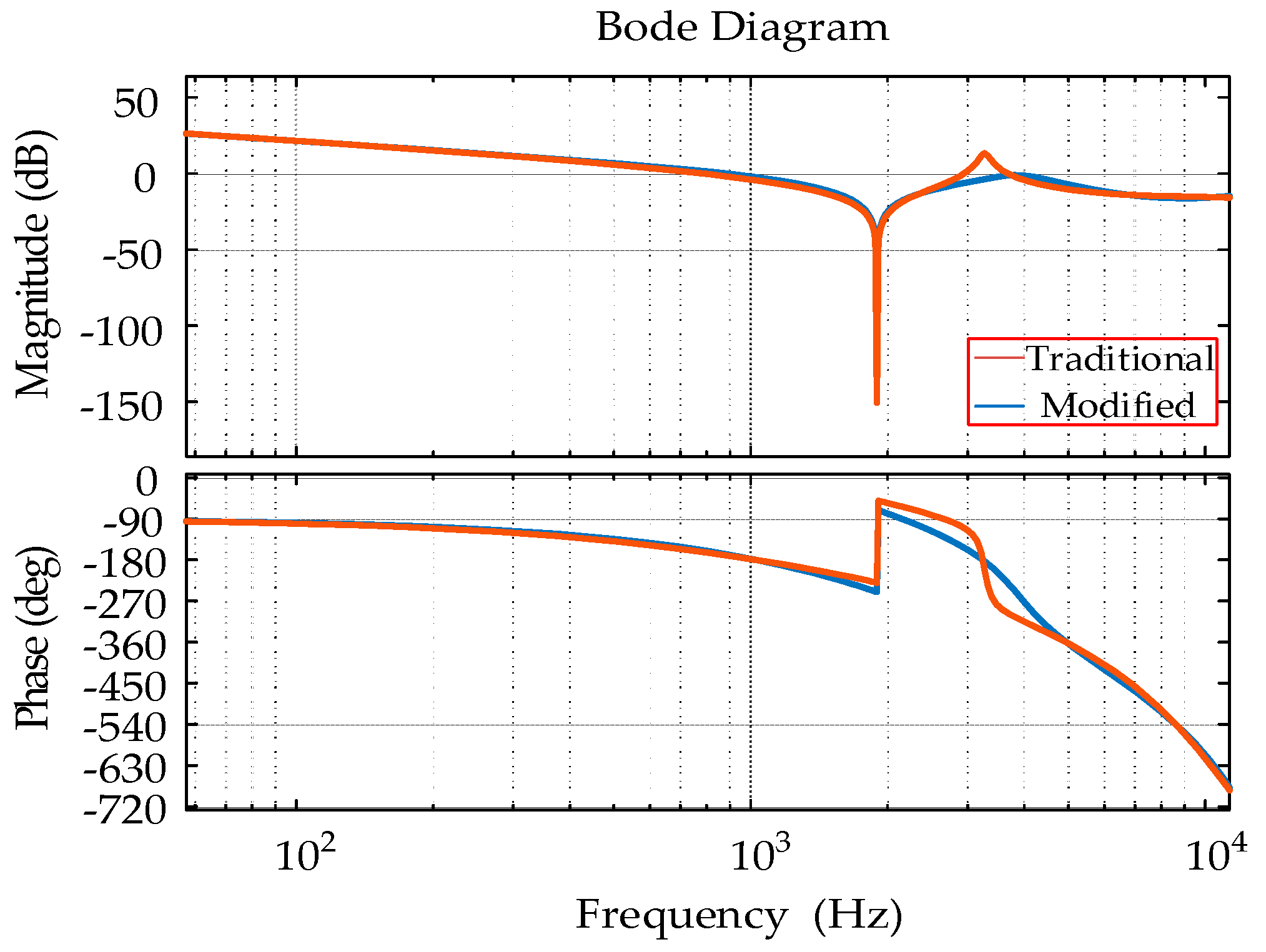
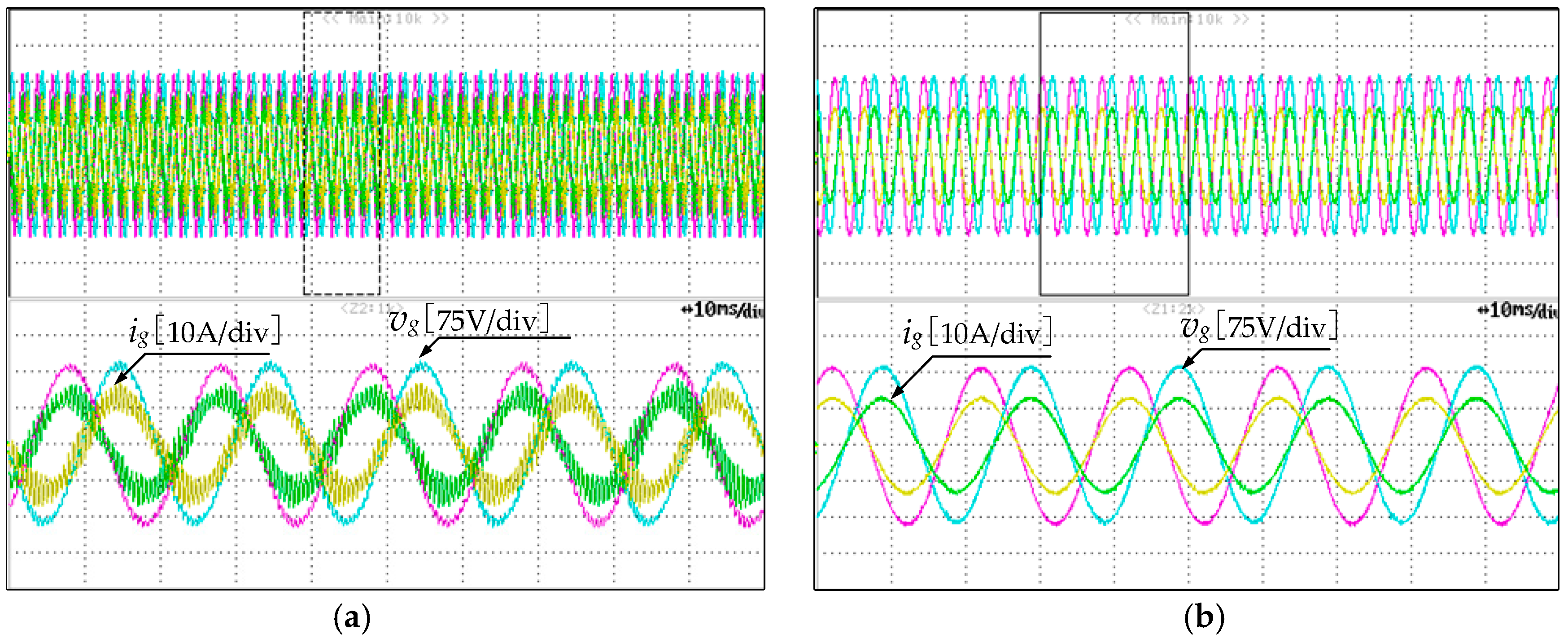
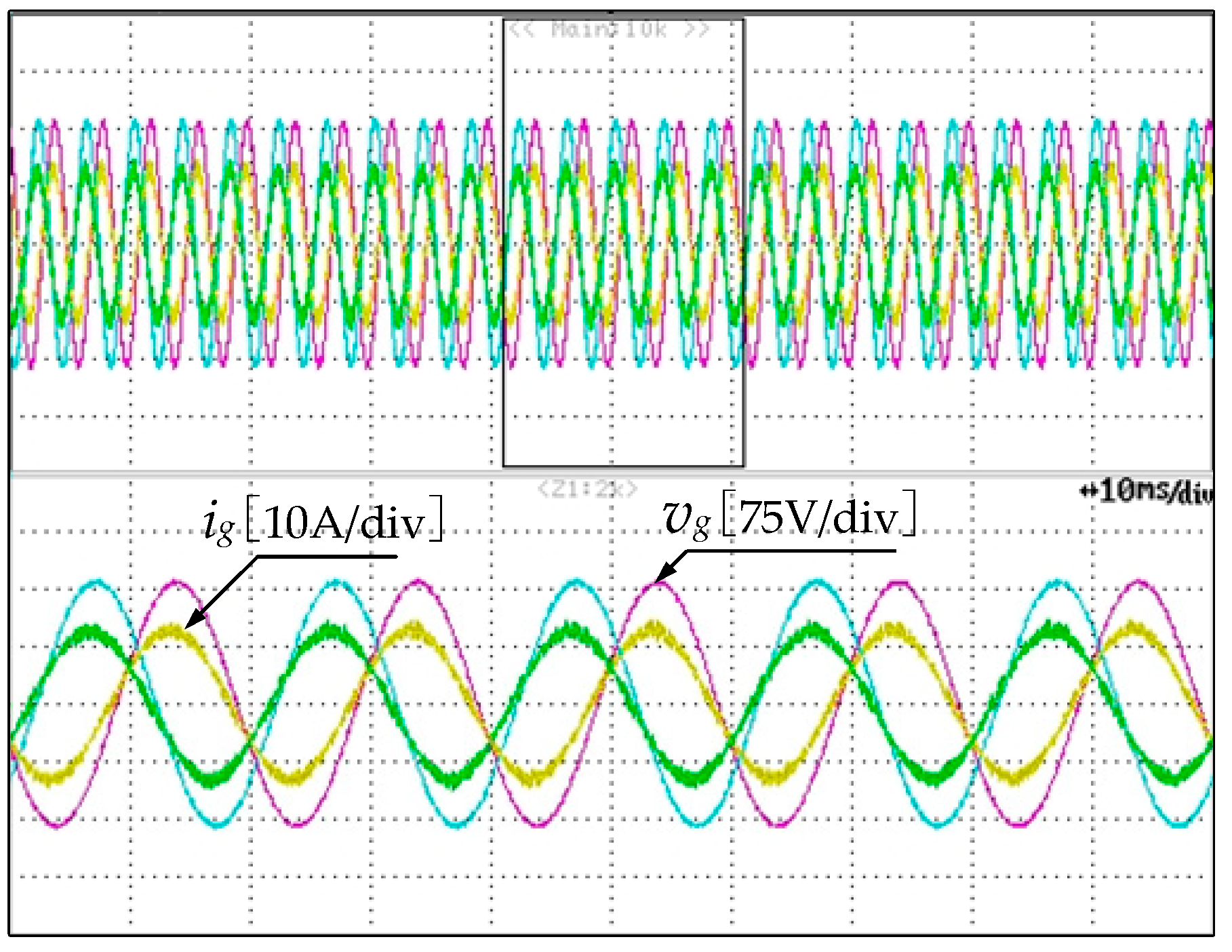
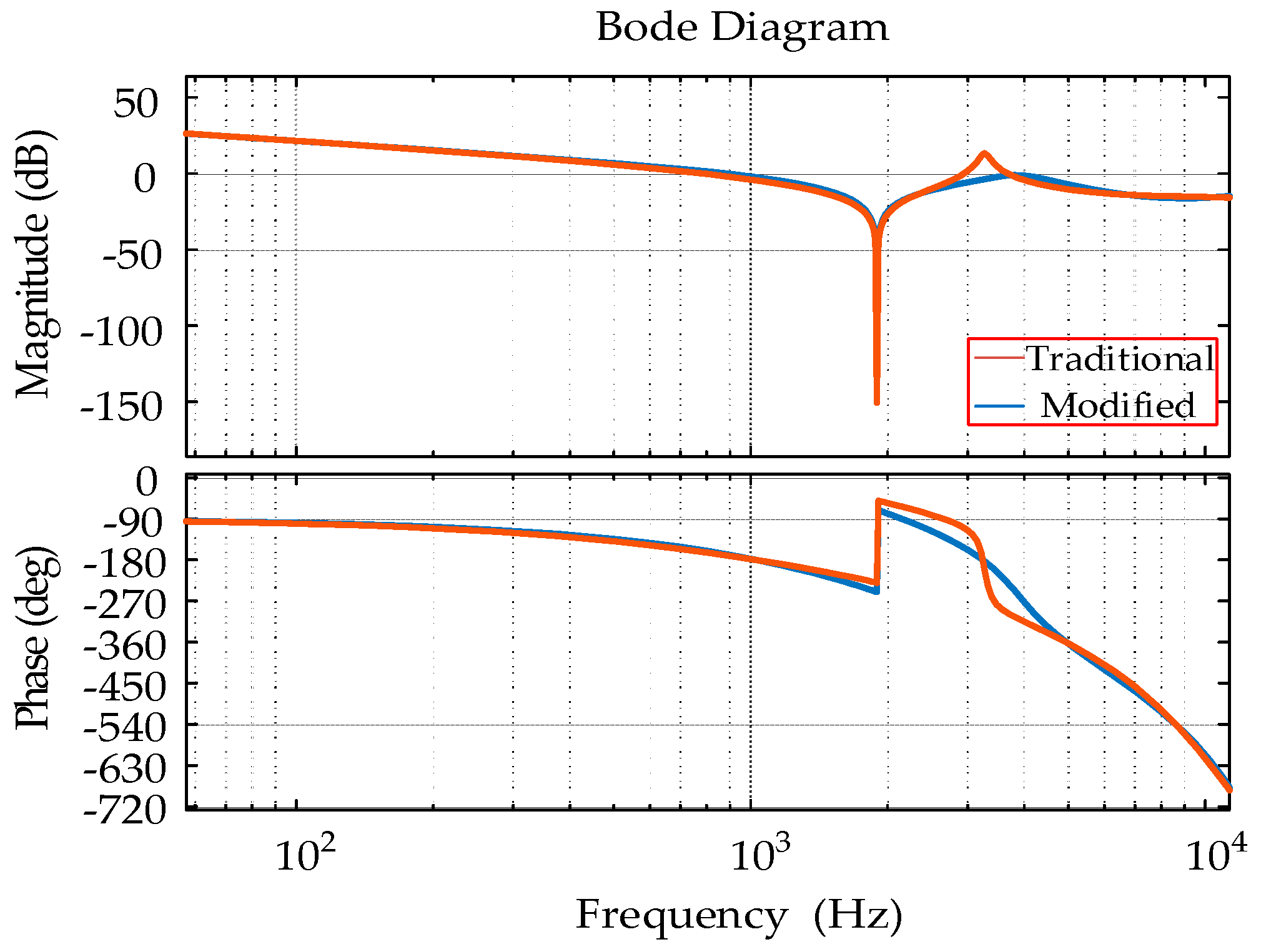
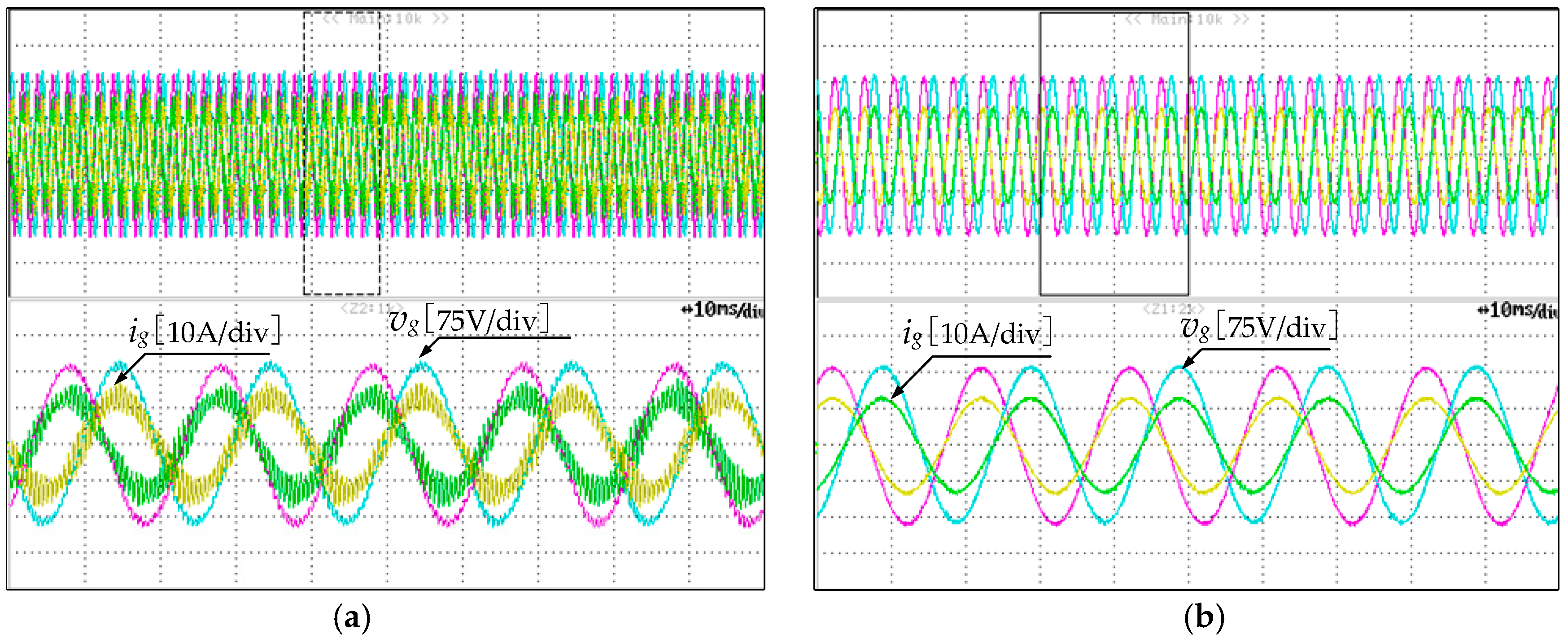
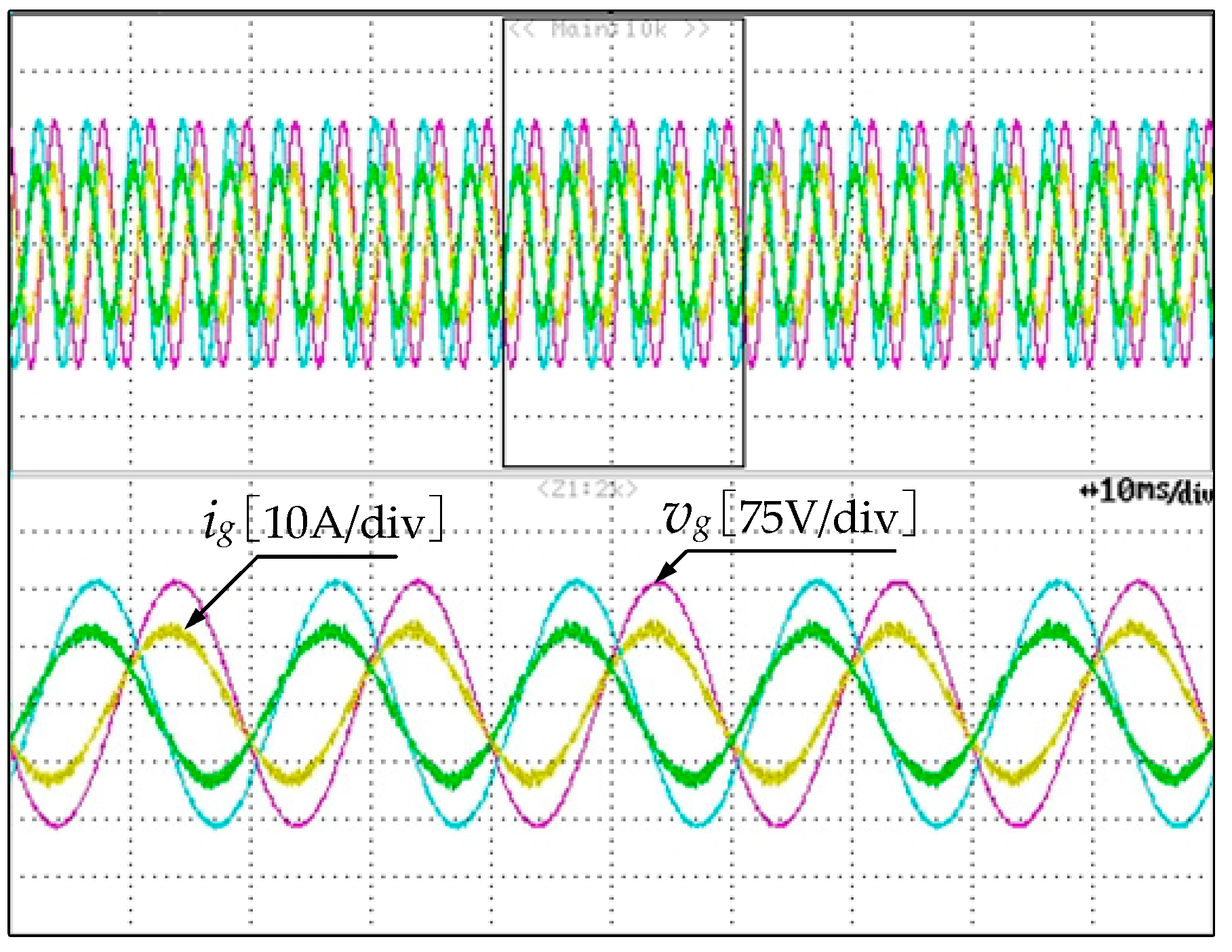
4.1. Test of Active Damping Effect
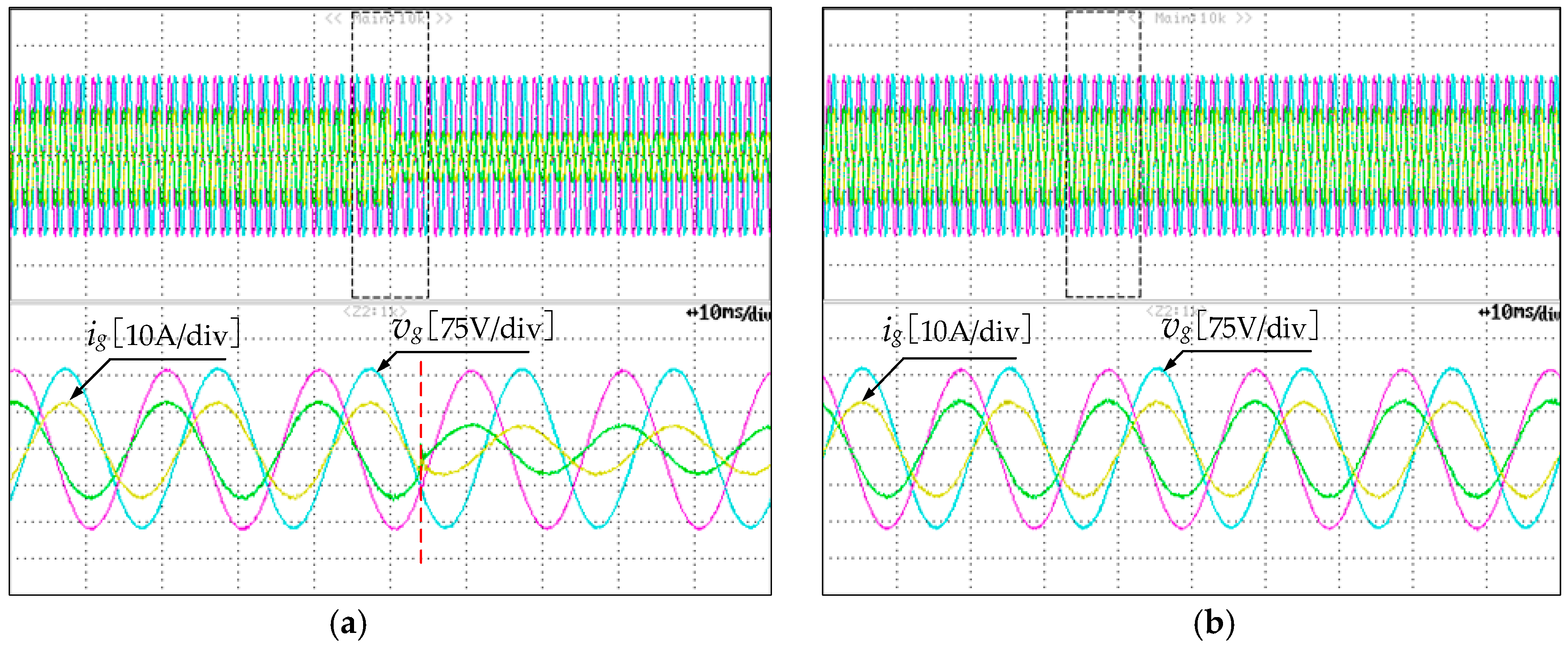
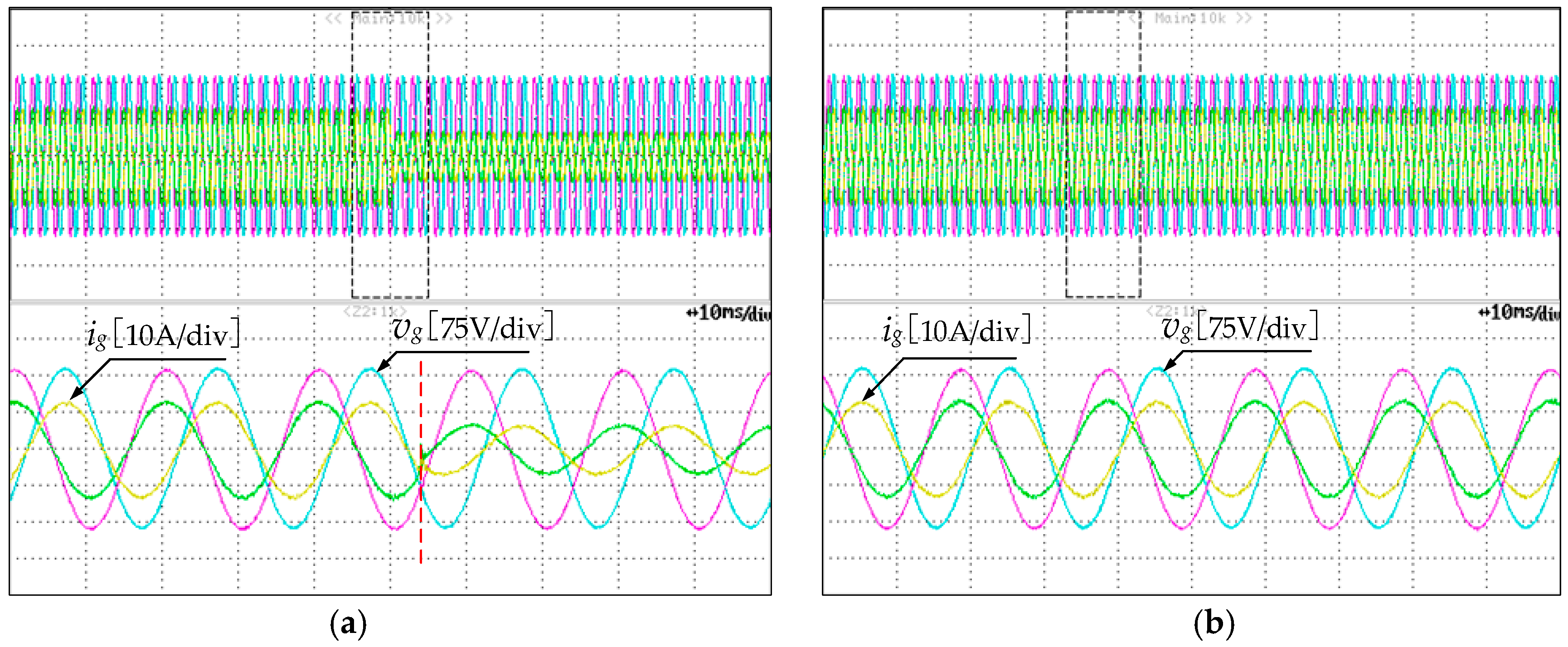
4.2. Performance of the Grid-Connected VSI against Sudden Changes in the Reference Current and Grid Inductance Variation
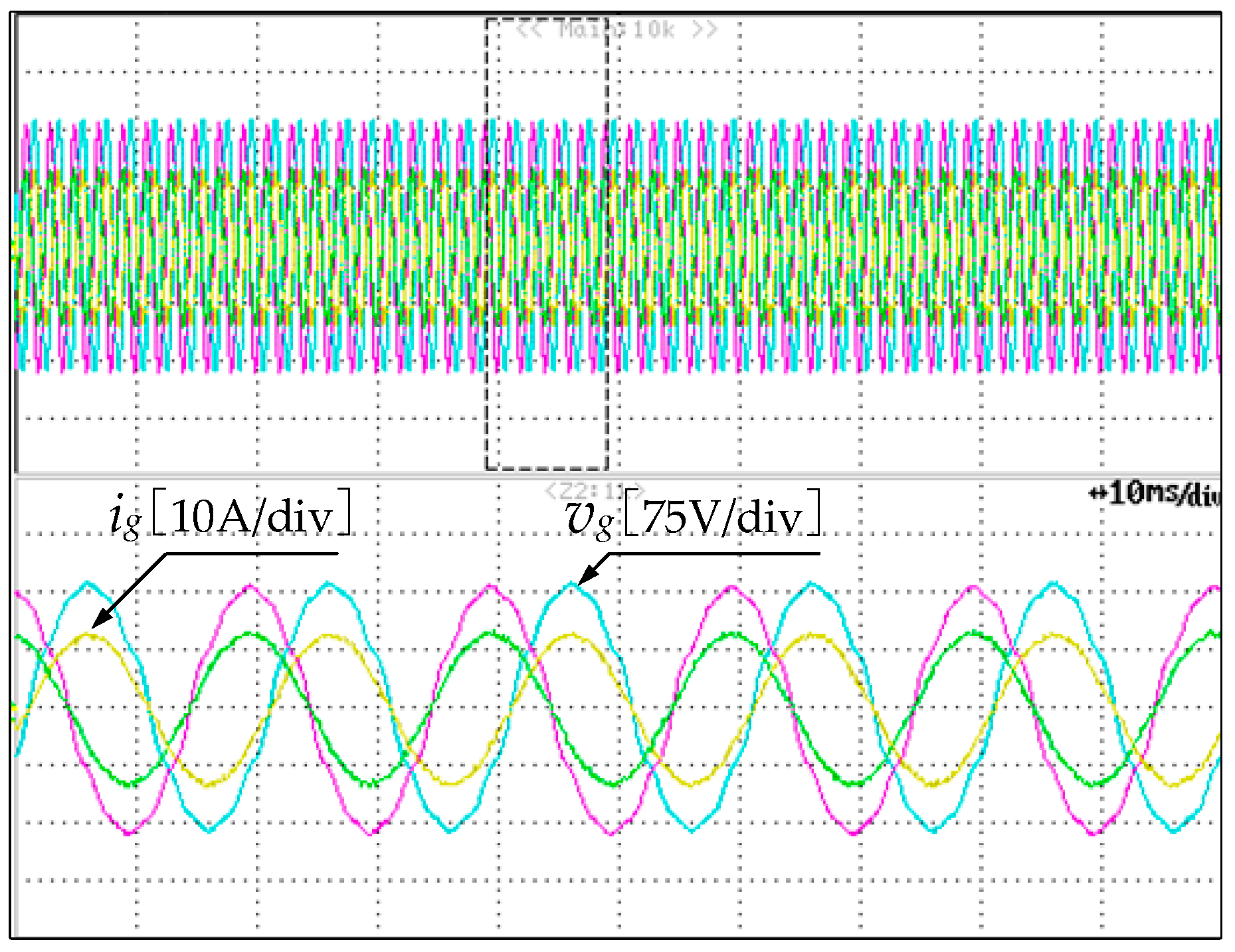
4.3. Test of the Grid-Connected VSI under Grid Distortion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Gong, Z.; Wu, X.; Dai, P.; Zhu, R. Modulated model predictive control for MMC-based active front-end rectifiers under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2019, 66, 2398–2409. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, W.; Shuai, Z.; Wang, X.; Luo, A.; Chung, H.S.; Blaabjerg, F. Principle and Robust Impedance-based design of grid-tied inverter with LLCL-Filter under wide variation of grid-reactance. IEEE Trans. Ind. Electron. 2018. [Google Scholar] [CrossRef]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Stability of photovoltaic and wind turbine grid-connected inverters for a large set of grid impedance values. IEEE Trans. Ind. Electron. 2006, 21, 263–272. [Google Scholar] [CrossRef]
- Huang, M.; Wang, X.; Loh, P.C.; Blaabjerg, F. Active damping of LLCL -filter resonance based on LC -trap voltage or current feedback. IEEE Trans. Ind. Electron. 2015, 31, 2337–2346. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Li, Z.; Zhao, Z. Modeling and analysis of resonance in LCL-type grid-connected inverters under different control schemes. Energies 2017, 10, 104. [Google Scholar] [CrossRef]
- Figueres, E.; Garcera, G.; Sandia, J.; Gonzalez-Espin, F.; Calvo Rubio, J. Sensitivity study of the dynamics of three-phase photovoltaic inverters with an LCL grid filter. IEEE Trans. Ind. Electron. 2009, 56, 706–717. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, W.; He, Y.; Lin, Z.; Blaabjerg, F.; Chung, H.S. An efficient and robust hybrid damper for LCL- or LLCL-based grid-tied inverter with strong grid-side harmonic voltage effect rejection. IEEE Trans. Ind. Electron. 2016, 63, 926–936. [Google Scholar] [CrossRef]
- Wu, W.; Liu, Y.; He, Y.; Chung, H.S.; Liserre, M.; Blaabjerg, F. Damping methods for resonances caused by LCL-filter-based current-controlled grid-tied power inverters: An overview. IEEE Trans. Ind. Electron. 2017, 64, 7402–7413. [Google Scholar] [CrossRef]
- Huang, M.; Wang, X.; Loh, P.C.; Blaabjerg, F. LLCL-filtered grid converter with improved stability and robustness. IEEE Trans. Power Electron. 2016, 31, 3958–3967. [Google Scholar] [CrossRef]
- Lorzadeh, I.; Abyaneh, H.A.; Savaghebi, M.; Bakhshai, A.; Guerrero, J.M. Capacitor current feedback-based active resonance damping strategies for digitally-controlled inductive-capacitive -inductive-filtered grid-connected inverters. Energies 2016, 9, 642. [Google Scholar] [CrossRef]
- Schiesser, M.; Wasterlain, S.; Marchesoni, M.; Carpita, M. A simplified design strategy for multi-resonant current control of a grid-connected voltage source inverter with an LCL filter. Energies 2018, 11, 609. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A new feedback method for PR current control of LCL-filter-based grid-connected inverter. IEEE Trans. Ind. Electron. 2010, 57, 2033–2041. [Google Scholar] [CrossRef]
- He, Y.; Chung, H.S.; Ho, C.N.; Wu, W. Use of boundary control with second-order switching surface to reduce the system order for deadbeat controller in grid-connected inverter. IEEE Trans. Ind. Electron. 2016, 31, 2638–2653. [Google Scholar] [CrossRef]
- Mu, X.; Wang, J.; Wu, W.; Blaabjerg, F. A modified multifrequency passivity-based control for shunt active power filter with model-parameter-adaptive capability. IEEE Trans. Ind. Electron. 2018, 65, 760–769. [Google Scholar] [CrossRef]
- Shu, Z.L.; Liu, M.; Zhao, L.; Song, S.S.; Zhou, Q.; He, X.Q. Predictive harmonic control and its optimal digital implementation for MMC-based active power filter. IEEE Trans. Ind. Electron. 2016, 63, 5244–5254. [Google Scholar] [CrossRef]
- Falkowski, P.; Sikorski, A. Finite control set model predictive control for grid-connected AC–DC converters with LCL filter. IEEE Trans. Ind. Electron. 2018, 65, 2844–2852. [Google Scholar] [CrossRef]
- Jin, W.; Li, Y.; Sun, G.; Bu, L. H∞ repetitive control based on active damping with reduced computation delay for LCL-type grid-connected inverters. Energies 2017, 10, 586. [Google Scholar] [CrossRef]
- Yoon, S.; Lai, N.B.; Kim, K. A systematic controller design for a grid-connected inverter with LCL filter using a discrete-time integral state feedback control and state observer. Energies 2018, 11, 437. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A sliding-mode controller with multiresonant sliding surface for single-phase grid-connected VSI with an LCL filter. IEEE Trans. Ind. Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Vieira, R.P.; Martins, L.T.; Massing, J.R.; Stefanello, M. Sliding mode controller in a multiloop framework for a grid-connected VSI with LCL filter. IEEE Trans. Ind. Electron. 2017, 65, 4714–4723. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuña, L.G.; Castilla, M.; Miret, J.; de la Hoz, J. Variable structure control for three-phase LCL-filtered inverters using a reduced converter model. IEEE Trans. Ind. Electron. 2017, 65, 5–15. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuña, L.G.; Castilla, M.; Miret, J.; Martín, H. Variable structure control in natural frame for three-phase grid-connected inverters with LCL filter. IEEE Trans. Ind. Electron. 2018, 33, 4512–4522. [Google Scholar] [CrossRef]
- Altin, N.; Ozdemir, S.; Komurcugil, H.; Sefa, I. Sliding-mode control in natural frame with reduced number of sensors for three-phase grid-tied LCL-interfaced inverters. IEEE Trans. Ind. Electron. 2019, 66, 2903–2913. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuña, L.G.; Morales, J.; Castilla, M.; Miret, J. Model-based control for a three-phase shunt active power filter. IEEE Trans. Ind. Electron. 2016, 63, 3998–4007. [Google Scholar] [CrossRef]
- Komurcugil, H.; Ozdemir, S.; Sefa, I.; Altin, N.; Kukrer, O. Sliding-mode control for single-phase grid-connected LCL-filtered VSI with double-band hysteresis scheme. IEEE Trans. Ind. Electron. 2016, 63, 864–873. [Google Scholar] [CrossRef]
- Wang, B.; Xu, Y.; Shen, Z.; Zou, J.; Li, C.; Liu, H. Current control of grid-connected inverter with LCL filter based on extended-state observer estimations using single sensor and achieving improved robust observation dynamics. IEEE Trans. Ind. Electron. 2017, 64, 5428–5439. [Google Scholar] [CrossRef]
- Kukkola, J.; Hinkkanen, M.; Zenger, K. Observer-based state-space current controller for a grid converter equipped with an LCL filter: Analytical method for direct discrete-time design. IEEE Trans. Ind. Appl. 2015, 51, 4079–4090. [Google Scholar] [CrossRef]
- Kukkola, J.; Hinkkanen, M. Observer-based state-space current control for a three-phase grid-connected converter equipped with an LCL filter. IEEE Trans. Ind. Appl. 2014, 50, 2700–2709. [Google Scholar] [CrossRef]
- Kukkola, J.; Hinkkanen, M. State observer for grid-voltage sensorless control of a converter under unbalanced conditions. IEEE Trans. Ind. Appl. 2018, 54, 286–297. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| DC link voltage Udc | 350 V |
| Grid voltage vg | 110 V(RMS) |
| Sampling frequency fs | 12 kHz |
| Switching frequency fsw | 12 kHz |
| Inverter-side inductance L1 | 1.2 mH |
| Filter capacitance C | 6 μF |
| Grid-side inductance L2 | 1.2 mH |
| Inductor resistors r1, r2 | 0.2 Ω, 0.2 Ω |
| Symbol | Value |
|---|---|
| Coefficient of control kp | 10 |
| Coefficient of control kr | 800 |
| Coefficient of control kdamp | 8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, M.; Li, H.; Wu, W.; Blaabjerg, F. Observer-Based Sliding Mode Control to Improve Stability of Three-Phase LCL-Filtered Grid-Connected VSIs. Energies 2019, 12, 1421. https://doi.org/10.3390/en12081421
Huang M, Li H, Wu W, Blaabjerg F. Observer-Based Sliding Mode Control to Improve Stability of Three-Phase LCL-Filtered Grid-Connected VSIs. Energies. 2019; 12(8):1421. https://doi.org/10.3390/en12081421
Chicago/Turabian StyleHuang, Min, Han Li, Weimin Wu, and Frede Blaabjerg. 2019. "Observer-Based Sliding Mode Control to Improve Stability of Three-Phase LCL-Filtered Grid-Connected VSIs" Energies 12, no. 8: 1421. https://doi.org/10.3390/en12081421
APA StyleHuang, M., Li, H., Wu, W., & Blaabjerg, F. (2019). Observer-Based Sliding Mode Control to Improve Stability of Three-Phase LCL-Filtered Grid-Connected VSIs. Energies, 12(8), 1421. https://doi.org/10.3390/en12081421