Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges




Abstract
1. Introduction
- Costs associated with production and their correlation with the purchasing power of customers;
- Identifying a battery technology that provides the best power/weight capacity ratio, low charging time, high lifecycle, safety in operation (eliminating the risk of self-ignition due to thermal load), reduced production prices;
- Calculation of well-to-wheel emissions, due to the energy mix used in the battery charging process;
- Range satisfaction;
- Intention to recommend;
- Purchase intentions;
- Vehicle purchase price;
- Maintenance costs;
- Reduced greenhouse gas emissions;
- Cost of exploitation.
- High lifetime (8–15 years);
- Cycle life (2000–5000 @ 80% DOD—depth of discharge);
- Operating/exploitation effectively at a temperature range between −20 °C and 60 °C;
- Resistance to vibration effects (caused by the vehicle-road interaction and by the EV’s powertrain).
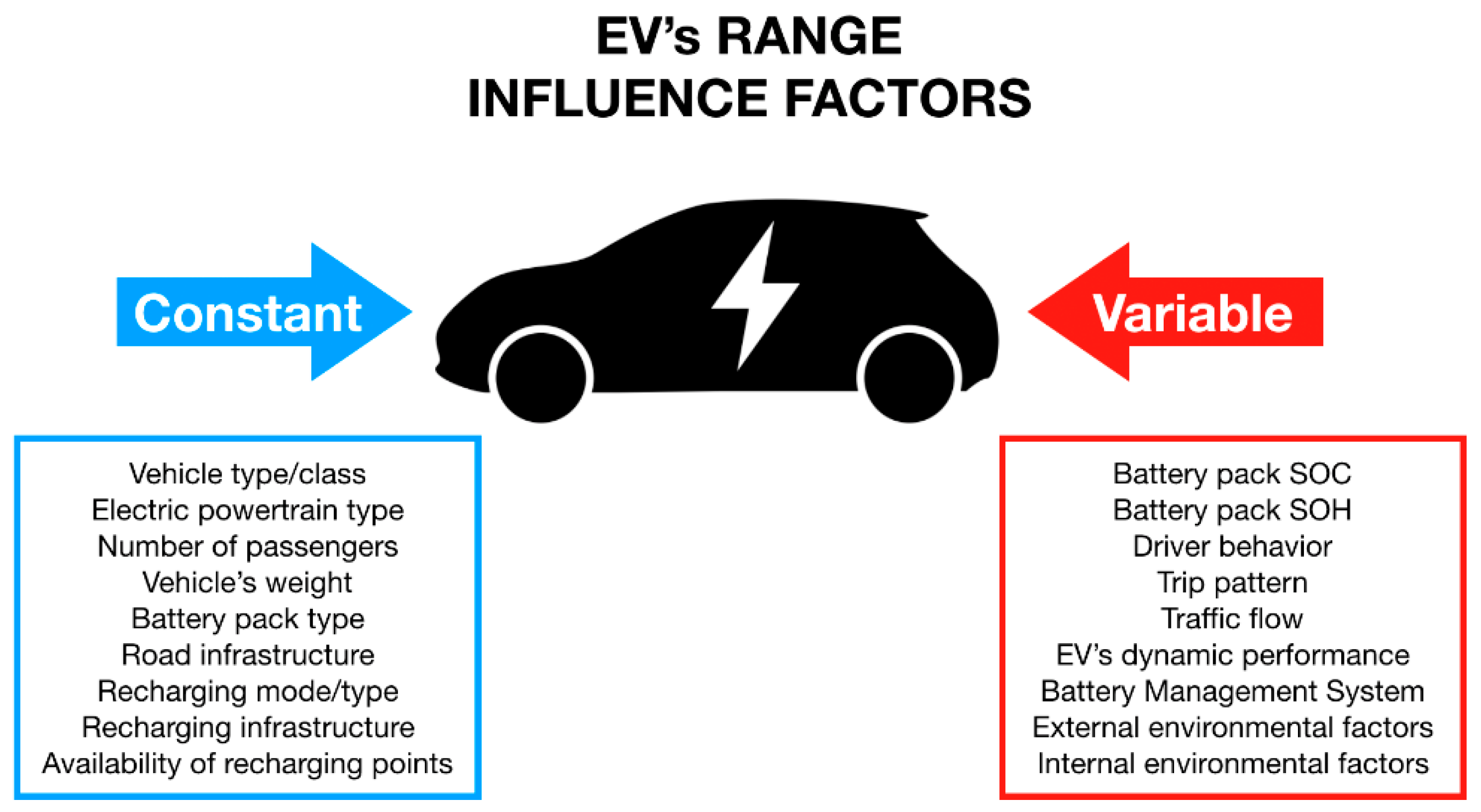
2. Influence Factors on Range Prediction
2.1. General Considerations
2.2. Electric Vehicle
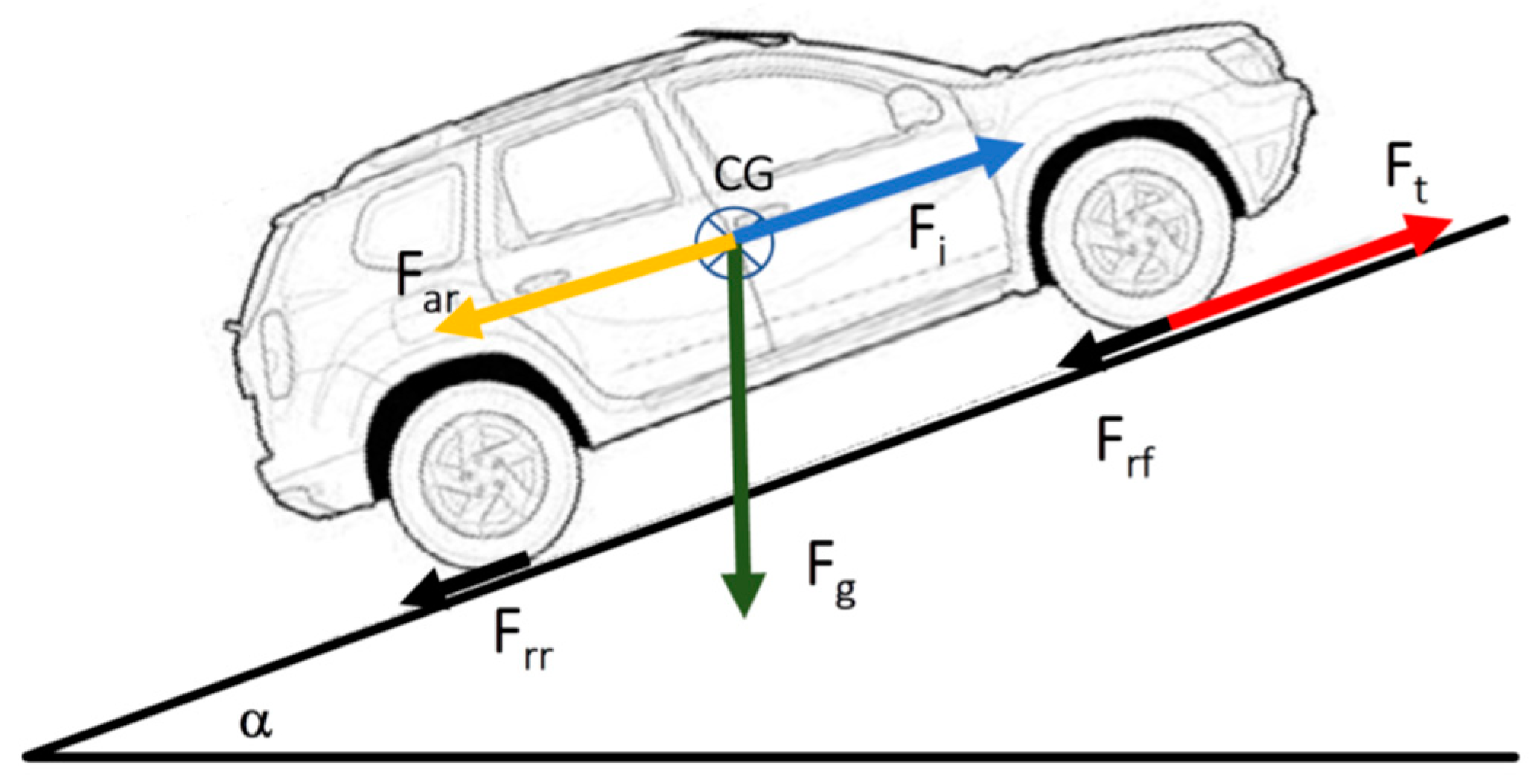
2.1.1. Vehicle Design
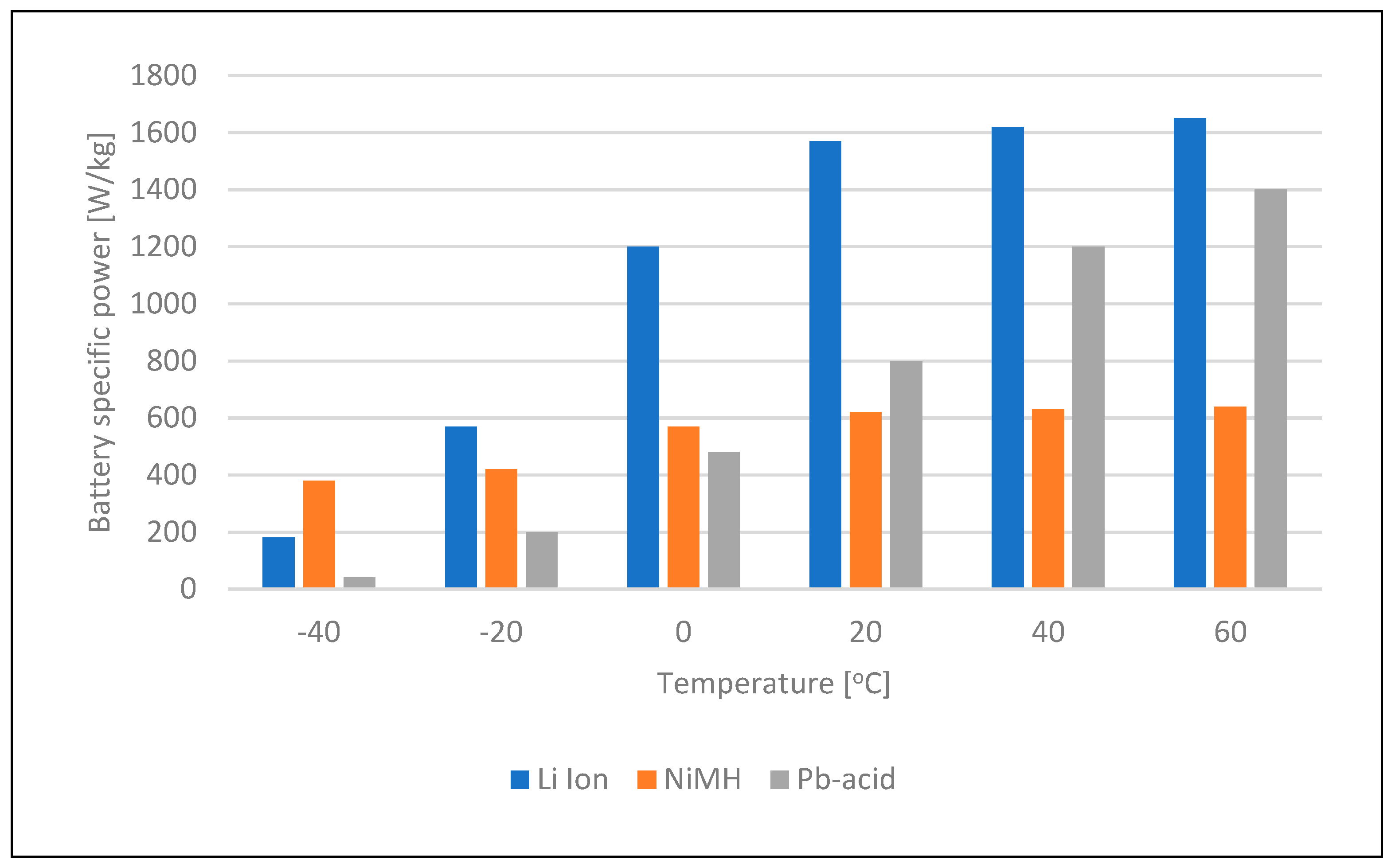
2.1.2. Battery Management System
- Battery charging and discharge control based on the energy demand of the powertrain and the available energy load;
- Protection of electrochemical cells against over-charging and/or over-discharging phenomena;
- Monitoring and balancing electrochemical cell voltage;
- Equalization of charging between battery cells;
- Monitoring the input and output voltage and current;
- Monitoring and controlling the battery temperature;
- Control and command of electrical and electronic systems;
- Diagnose, evaluate and display faults and malfunctions.
- Conventional methods (CM);
- Adaptive filter algorithm (AFA);
- Learning algorithm (LA);
- Non-linear observer (NO);
- Hybrid methods (HM).
2.3. Driver
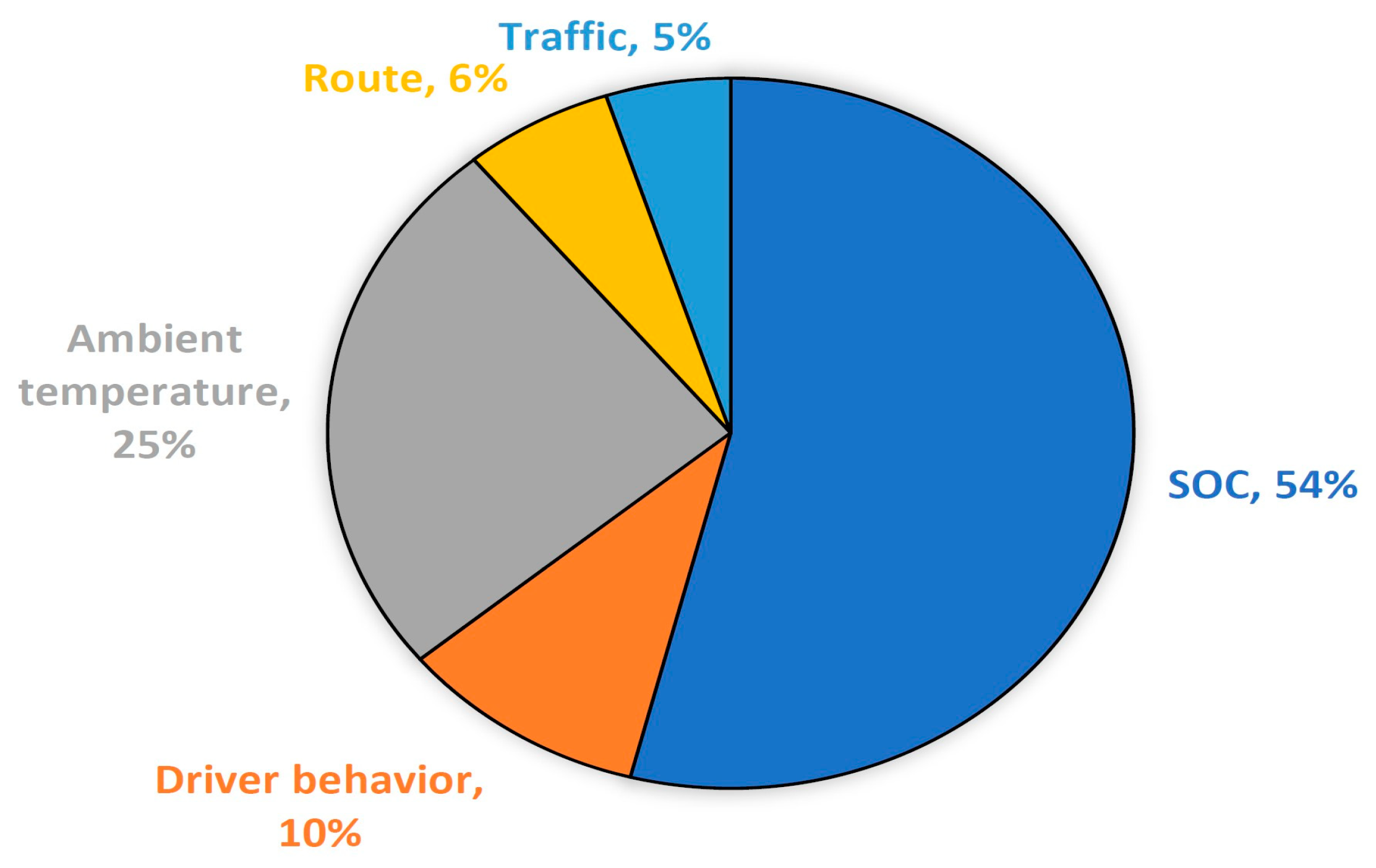
2.4. Environment
3. Methods and Approaches for EV Range Prediction
3.1. Methods for Parametrization of Driver Behavior
3.2. Methods to Combine Multiple Factors in a Single Model
4. Discussion
- The familiarity of the driver with the type and technical characteristics of the EV that it exploits for efficient energy usage.
- Creation of visual instruments (e.g., on-board maps) that delineate the area that can be covered by the electric vehicle (for example, the green area could be the potential area covered from existent battery pack energy, the yellow area possibly could cover the possible area of travel by taking measures related to adjusting driving behavior, while red area could indicate areas where there is not enough hardware/software resources to facilitate reaching the desired destination) [26]. Information that is calculated/determined can be visually displayed to the driver by means of specific instruments of the dashboard or on the entertainment system’s display), or even on smartphone devices, which will be easily perceived and analyzed by any EV user and will eliminate “range anxiety”.
- Besides interactive maps, if the destination point is known, a desirable solution should suggest an energy-efficient route and show available areas around the destination. Moreover, in case after reaching the destination the range is less than the distance to the closest charging point, the system should warn the driver about this issue and build a new route with a stop at a charging station.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Varga, B.O.; Mariasiu, F. Indirect environment-related effects of electric car vehicles use. Environ. Eng. Manag. J. 2018, 17, 1591–1599. [Google Scholar]
- Zhu, J.; Wierzbicki, T.; Li, W. A review of safety-focused mechanical modeling of commercial lithium-ion batteries. J. Power Sources 2018, 378, 153–168. [Google Scholar] [CrossRef]
- Egbue, O.; Long, S. Barriers to widespread adoption of electric vehicles: An analysis of consumer attitudes and perceptions. Energy Policy 2012, 48, 717–729. [Google Scholar] [CrossRef]
- EN21. Renewables 2015 Global Status Report. Available online: http://www.ren21.net/wp-content/uploads/2015/07/REN12-GSR2015_Onlinebook_low1.pdf (accessed on 16 December 2018).
- Wu, G.; Inderbitzin, A.; Bening, C. Total cost of electric vehicles compared to conventional vehicles: A probabilistic analysis and projection across market segments. Energy Policy 2015, 80, 196–214. [Google Scholar] [CrossRef]
- McManus, M.C. Environmental consequences of the use of batteries in low carbon systems: The impact of battery production. Appl. Energy 2012, 93, 288–295. [Google Scholar] [CrossRef]
- Nykvist, B.; Nilsson, M. Rapidly falling costs of battery packs for electric vehicles. Nat. Clim. Chang. 2015, 5, 329–332. [Google Scholar] [CrossRef]
- Park, O.K.; Cho, Y.; Lee, S.; Yoo, H.C.; Song, H.K.; Cho, J. Who Will Drive Electric Vehicles, Olivine or Spinel? Energy Environ. Sci. 2011, 4, 1621–1633. [Google Scholar] [CrossRef]
- Franke, T.; Günther, M.; Trantow, M.; Krems, J.F. Does this range suit me? Range satisfaction of battery electric vehicle users. Appl. Ergon. 2017, 65, 191–199. [Google Scholar] [CrossRef] [PubMed]
- Ramachandran, S.; Stimming, U. Well to wheel analysis of low carbon alternatives for road traffic. Energy Environ. Sci. 2015, 8, 3313–3324. [Google Scholar] [CrossRef]
- Singer, M. Consumer Views on Plug-In Electric Vehicles—National Benchmark Report NREL. 2016. Available online: http://www.afdc.energy.gov/uploads/publication/consumer_views_pev_benchmark.pdf (accessed on 18 December 2018).
- Labeye, E.; Hugot, M.; Brusque, C.; Regan, M.A. The electric vehicle: A new driving experience involving specific skills and rules. Transp. Res. Part F Traffic Psychol. Behav. 2016, 37, 27–40. [Google Scholar] [CrossRef]
- Park, E.; Lim, J.; Cho, Y. Understanding the Emergence and Social Acceptance of Electric Vehicles as Next-Generation Models for the Automobile Industry. Sustainability 2018, 10, 662. [Google Scholar] [CrossRef]
- Nilsson, M. Electric Vehicles: The Phenomenon of Range Anxiety. 2011. Available online: http://e-mobility-nsr.eu/fileadmin/user_upload/downloads/info-pool/the_phenomenon_of_range_anxiety_elvire.pdf (accessed on 12 December 2018).
- Franke, T.; Krems, J.F. Interacting with limited mobility resources: Psychological range levels in electric vehicle use. Transp. Res. Part A Policy Pract. 2013, 48, 109–122. [Google Scholar] [CrossRef]
- Eisel, M.; Nastjuk, I.; Kolbe, L.M. Understanding the influence of in-vehicle information systems on range stress–Insights from an electric vehicle field experiment. Transp. Res. Part F Traffic Psychol. Behav. 2016, 43, 199–211. [Google Scholar] [CrossRef]
- Bi, J.; Wanga, Y.; Shaoa, S.; Cheng, Y. Residual range estimation for battery electric vehicle based on radial basis T function neural network. Measurement 2018, 128, 197–203. [Google Scholar] [CrossRef]
- Kambly, K.; Bradley, T.H. Geographical and temporal differences in electric vehicle range due to cabin conditioning energy consumption. J. Power Sources 2015, 275, 468–475. [Google Scholar] [CrossRef]
- Genikomsakis, K.N.; Mitrentsis, G. A computationally efficient simulation model for estimating energy consumption of electric vehicles in the context of route planning applications. Transp. Res. Part D Transp. Environ. 2017, 50, 98–118. [Google Scholar] [CrossRef]
- Mruzek, M.; Gajdáč, I.; Kučera, L.; Barta, D. Analysis of Parameters Influencing Electric Vehicle Range. Procedia Eng. 2016, 134, 165–174. [Google Scholar] [CrossRef]
- Sentoff, K.M.; Aultman-Hall, L.; Holmén, B.A. Implications of driving style and road grade for accurate vehicle activity data and emissions estimates. Transp. Res. Part D Transp. Environ. 2015, 35, 175–188. [Google Scholar] [CrossRef]
- Wu, X.; He, X.; Yu, G.; Harmandayan, A.; Wang, Y. Energy-optimal speed control for electric vehicles on signalized arterials. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2786–2796. [Google Scholar]
- Yuksel, T.; Michalek, J.J. Effects of regional temperature on electric vehicle efficiency, range, and emissions in the United States. Environ. Sci. Technol. 2015, 49, 3974–3980. [Google Scholar] [CrossRef]
- Rezvanizaniani, S.M.; Liu, Z.; Chen, Y.; Lee, J. Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility. J. Power Sources 2014, 256, 110–124. [Google Scholar] [CrossRef]
- Hucho, H. Aerodynamics of Road Vehicles, 4th ed.; SAE International: Warrendale, PA, USA, 1998. [Google Scholar]
- Trigg, T. Cities Where It’s Faster to Walk than Drive. 2015. Available online: https://blogs.scientificamerican.com/plugged-in/cities-where-it-s-faster-to-walk-than-drive/ (accessed on 18 December 2018).
- Jiménez, D.; Hernández, S.; Fraile-Ardanuy, J.; Serrano, J.; Rubén Fernández, R.; Álvarez, F. Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones. Energies 2018, 11, 412. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Hofer, J.; Wilhelm, E.; Schenler, W. Comparing the Mass, Energy, and Cost Effects of Lightweighting in Conventional and Electric Passanger Vehicles. J. Sustain. Dev. Energy Water Environ. Syst. 2014, 2, 284–295. [Google Scholar] [CrossRef]
- Berjoza, D.; Jurgen, I. Effects of change in the weight of electric vehicles on their performance characteristics. Agron. Res. 2017, 15, 952–963. [Google Scholar]
- Thomas, J.; Huff, S.; West, B. Fuel Economy and Emissions Effects of Low Tire Pressure, Open Windows, Roof Top and Hitch-Mounted Cargo, and Trailer. SAE Int. J. Passeng. Cars-Mech. Syst. 2014, 7, 862–872. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicles applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Rauh, N.; Franke, T.; Krems, J.F. Understanding the impact of electric vehicle driving experience on range anxiety. Hum. Factors 2015, 57, 177–187. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, W.; Zhang, C.; Chen, J. Climate control loads prediction of electric vehicles. Appl. Therm. Eng. 2017, 110, 1183–1188. [Google Scholar] [CrossRef]
- Iora, P.; Tribioli, L. Effect of Ambient Temperature on Electric Vehicles’ Energy Consumption and Range: Model Definition and Sensitivity Analysis Based on Nissan Leaf Data. World Electr. Veh. J. 2019, 10, 2. [Google Scholar] [CrossRef]
- Buqa, H.; Würsig, A.; Vetter, J.; Spahr, M.; Krumeich, F.; Novák, P. SEI film formation on highly crystalline graphitic materials in lithium-ion batteries. J. Power Sources 2006, 153, 385–390. [Google Scholar] [CrossRef]
- Pinson, M.B.; Bazant, M.Z. Theory of SEI formation in rechargeable batteries: Capacity fade, accelerated aging and lifetime prediction. J. Electrochem. Soc. 2013, 160, 243–250. [Google Scholar] [CrossRef]
- Zhang, S.S.; Xu, K.; Jow, T.R. Electrochemical impedance study on the low temperature of Li-ion batteries. Electrochim. Acta 2004, 49, 1057–1061. [Google Scholar] [CrossRef]
- Haruta, M.; Okubo, T.; Masuo, Y.; Yoshida, S.; Tomita, A.; Takenaka, T.; Takayuki Doi, T.; Inaba, M. Temperature effects on SEI formation and cyclability of Si nanoflake powder anode in the presence of SEI-forming additives. Electrochim. Acta 2017, 224, 186–193. [Google Scholar] [CrossRef]
- Liu, H.; Wei, Z.; He, W.; Zhao, J. Thermal issues about Li-ion batteries and recent progress in battery thermal management systems: A review. Energy Convers. Manag. 2017, 150, 304–330. [Google Scholar] [CrossRef]
- Zhang, S.S.; Xu, K.; Jow, T.R. The low temperature performance of Li-ion batteries. J. Power Sources 2003, 115, 137–140. [Google Scholar] [CrossRef]
- Rodrigues, M.-T.F.; Babu, G.; Gullapalli, H.; Kalaga, K.; Sayed, F.N.; Kato, K.; Joyner, J.; Ajayan, P.M. A materials perspective on Li-ion batteries at extreme temperatures. Nat. Energy 2017, 2, 17108. [Google Scholar] [CrossRef]
- Weighall, M.J. Test requirements for 42 V battery systems. J. Power Sources 2003, 116, 151–159. [Google Scholar] [CrossRef]
- Zhu, T.; Min, H.; Yu, Y.; Zhao, Z.; Xu, T.; Chen, Y.; Li, X.; Zhang, C. An optimized energy management strategy for preheating vehicle-mounted li-ion batteries at subzero temperatures. Energies 2018, 10, 243. [Google Scholar] [CrossRef]
- Doughty, D.H.; Roth, E.P.; Crafts, C.C.; Nagasubramanian, G.; Henriksen, G.; Amine, K. Effects of additives on thermal stability of Li ion cells. J. Power Sources 2005, 146, 116–120. [Google Scholar] [CrossRef]
- Li, J.; Yuan, C.F.; Guo, Z.H.; Zhang, Z.A.; Lai, Y.Q.; Liu, J. Limiting factors for low- temperature performance of electrolytes in LiFePO 4/Li and graphite/Li half cells. Electrochim. Acta 2012, 59, 69–74. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Yuan, Y.; Allan, M. Temperature effect on electric vehicle battery cycle life in Vehicle-to-grid applications. In Proceedings of the CICED 2010 Proceedings, Nanjing, China, 13–16 September 2010. [Google Scholar]
- Dubarry, M.; Liaw, B.Y.; Chen, M.S.; Chyan, S.S.; Han, K.C.; Sie, W.T.; Wu, S.H. Identifying battery aging mechanisms in large format Li ion cells. J. Power Sources 2011, 196, 3420–3425. [Google Scholar] [CrossRef]
- Andre, D.; Appel, C.; Soczka-Guth, T.; Sauer, D.U. Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries. J. Power Sources 2013, 224, 20–27. [Google Scholar] [CrossRef]
- Sun, B.; Jiang, J.; Zheng, F.; Zhao, W.; Liaw, B.Y.; Ruan, H.; Han, Z.; Zhang, W. Practical state of health estimation of power batteries based on Delphi method and grey relational grade analysis. J. Power Sources 2015, 282, 146–157. [Google Scholar] [CrossRef]
- Zhang, R.; Xia, B.; Li, B.; Cao, L.; Lai, Y.; Zheng, W.; Wang, H.; Wang, W.; Wang, M. A Study on the Open Circuit Voltage and State of Charge Characterization of High Capacity Lithium-Ion Battery under Different Temperature. Energies 2018, 11, 2408. [Google Scholar] [CrossRef]
- Diao, W.; Jiang, J.; Zhang, C.; Liang, H.; Pecht, M. Energy state of health estimation for battery packs based on the degradation and inconsistency. Energy Procedia 2017, 142, 3578–3583. [Google Scholar] [CrossRef]
- Hausbrand, R.; Cherkashinin, G.; Ehrenberg, H.; Gröting, M.; Albe, K.; Hess, C.; Jaegermann, W. Fundamental degradation mechanisms of layered oxide Li-ion battery cathode materials: Methodology, insights and novel approaches. Mater. Sci. Eng. B 2015, 192, 3–25. [Google Scholar] [CrossRef]
- Vetter, J.; Novak, P.; Wagner, M.R.; Veit, C.; Moller, K.-C.; Besenhard, J.O.; Winter, M.; Wohlfahrt-Mehrens, M.; Vogler, C.; Hammouche, A. Ageing mechanisms in lithium-ion batteries. J. Power Sources 2005, 147, 269–281. [Google Scholar] [CrossRef]
- Ferreira, J.C.; Monteiro, V.D.F.; Afonso, J.L. Data mining approach for range prediction of electric vehicle. In Conference on Future Automotive Technology: Focus Electromobility; Springer: Berlin/Heidelberg, Germany, 2012; pp. 1–15. [Google Scholar]
- Ferreira, J.C.; Monteiro, V.; Afonso, J.L. Dynamic range prediction for an electric vehicle. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–11. [Google Scholar]
- Bär, T.; Nienhüser, D.; Kohlhaas, R.; Zöllner, J.M. Probabilistic driving style determination by means of a situation-based analysis of the vehicle data. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1698–1703. [Google Scholar]
- Ziebart, B.D.; Maas, A.L.; Bagnell, J.A.; Dey, A.K. Maximum Entropy Inverse Reinforcement Learning. In Proceedings of the AAAI, Chicago, IL, USA, 13–17 July 2008; Volume 8, pp. 1433–1438. [Google Scholar]
- De Cauwer, C.; Verbeke, W.; Coosemans, T.; Faid, S.; Van Mierlo, J. A Data-Driven Method for Energy Consumption Prediction and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions. Energies 2017, 10, 608. [Google Scholar] [CrossRef]
- Javanmardi, S.; Bideaux, E.; Trégouët, J.F.; Trigui, R.; Tattegrain, H.; Nicouleau Bourles, E. Driving style modelling for eco-driving applications. IFAC PapersOnLine 2017, 50, 13866–13871. [Google Scholar] [CrossRef]
- Delling, D.; Goldberg, A.V.; Pajor, T.; Werneck, R.F. Customizable route planning in road networks. Transp. Sci. 2015, 51, 566–591. [Google Scholar] [CrossRef]
- Baum, M.; Dibbelt, J.; Pajor, T.; Wagner, D. Energy-optimal routes for electric vehicles. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013; pp. 54–63. [Google Scholar]
- OpenStreetMap Contributors. Planet Dump. 2017. Available online: https://www.openstreetmap.org (accessed on 12 December 2018).
- Oliva, J.A.; Weihrauch, C.; Bertram, T. Model-Based Remaining Driving Range Prediction in Electric Vehicles by using Particle Filtering and Markov Chains. World Electr. Veh. J. 2013, 6, 204–213. [Google Scholar] [CrossRef]
- Wang, D.; Yang, F.; Gan, L.; Li, Y. Fuzzy Prediction of Power Lithium Ion Battery State of Function Based on the Fuzzy c-Means Clustering Algorithm. World Electr. Veh. J. 2019, 10, 1. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City | Average Traffic Speed (km/h) |
|---|---|
| Seoul | 22.4 |
| Tokyo | 21.4 |
| London | 19.0 |
| Copenhagen | 15.5 |
| New York | 12.5 |
| Los Angeles | 12.4 |
| Beijing | 12.1 |
| New Delhi | 3.1 |
| Category of SOC Estimation Method | Estimation Average Error | Advantages | Disadvantages |
|---|---|---|---|
| Conventional Methods (CM) | ±2–8% | Simple, easy-to-use, high-precision method and consumes few hardware and software resources (relatively low costs to implement). | Difficulties in determining the initial state of SOC in time (the internal resistance of the battery undergoes changes over time due to specific chemical processes). |
| Adaptive Filter Algorithm (AFA) | ±1–4% | Good estimation by eliminating “noise” caused by external factors of the system that defines the energy source. Good accuracy achieved in low time. | Using complex mathematical calculations that offer the possibility of errors due to particularities of used algorithms. |
| Learning Algorithm (LA) | ±2–5% | High accuracy in estimation of battery energetic capacity by considering as parameters: SOC, SOH and working temperature. Can be applied to batteries operating under non-linear conditions of energetic processes. | It requires for implementation of large computational memory for complex mathematical calculations. |
| Non-linear Observer (NLO) | ±1–4% | Good, reliable and fast estimate of SOC. | Requires a good choice and programming of the controller, with limitations due to the use of the specific matrix to reduce/eliminate errors. |
| Hybrid Methods (HM) | ±1–8% | Relatively accurate and stable estimate of SOC obtained with relatively low implementation costs. | Errors in estimation of the SOC marginal values, due to the correlation and implementation of several/different SOC estimation methods. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varga, B.O.; Sagoian, A.; Mariasiu, F. Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies 2019, 12, 946. https://doi.org/10.3390/en12050946
Varga BO, Sagoian A, Mariasiu F. Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies. 2019; 12(5):946. https://doi.org/10.3390/en12050946
Chicago/Turabian StyleVarga, Bogdan Ovidiu, Arsen Sagoian, and Florin Mariasiu. 2019. "Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges" Energies 12, no. 5: 946. https://doi.org/10.3390/en12050946
APA StyleVarga, B. O., Sagoian, A., & Mariasiu, F. (2019). Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies, 12(5), 946. https://doi.org/10.3390/en12050946