Analysis of the Sensitivity of Extended Kalman Filter-Based Inertia Estimation Method to the Assumed Time of Disturbance †



Abstract
1. Introduction
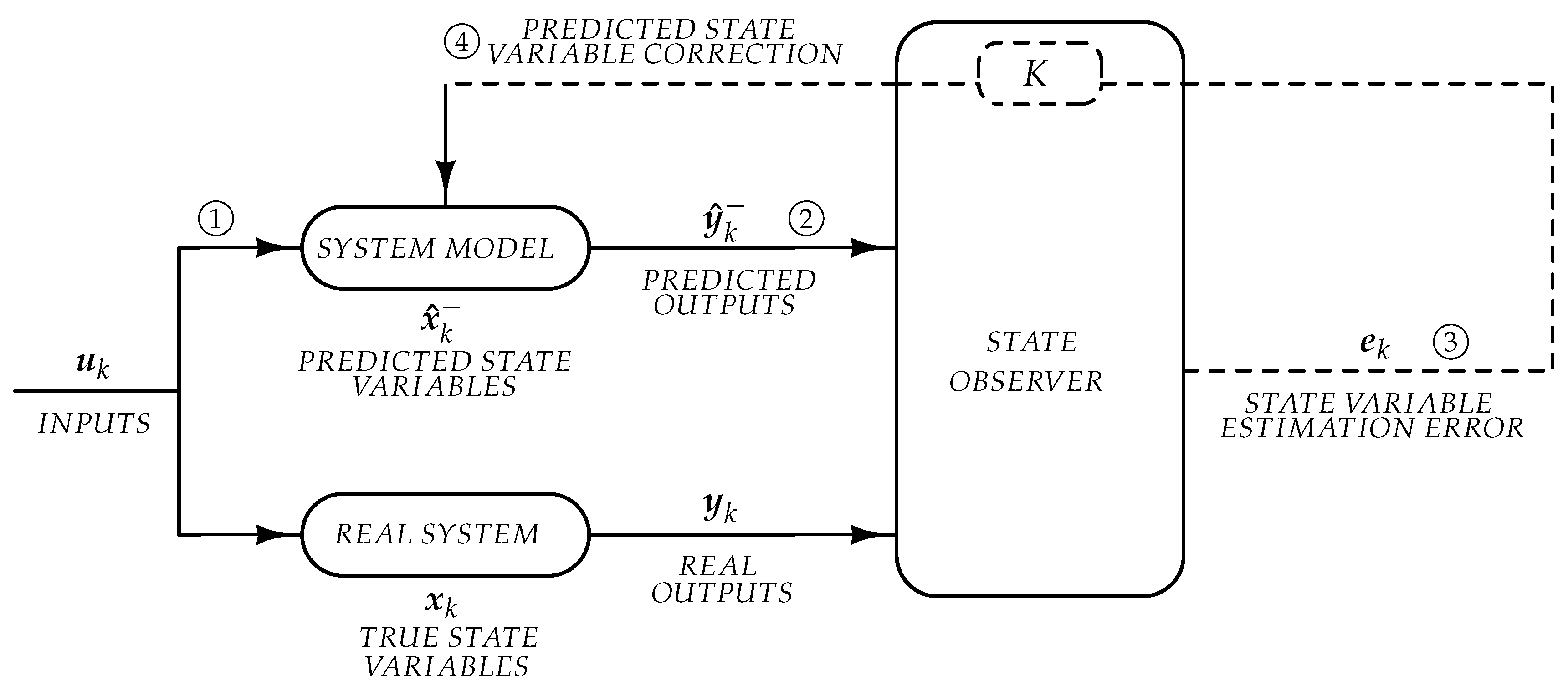
2. The Extended Kalman Filter (EKF)
2.1. The Operating Principle of the EKF
2.2. The EKF-Based Inertia Estimation Method
3. The Window-Based Method for the Simultaneous Estimation of the Inertia and of the Time of Disturbance
4. Results
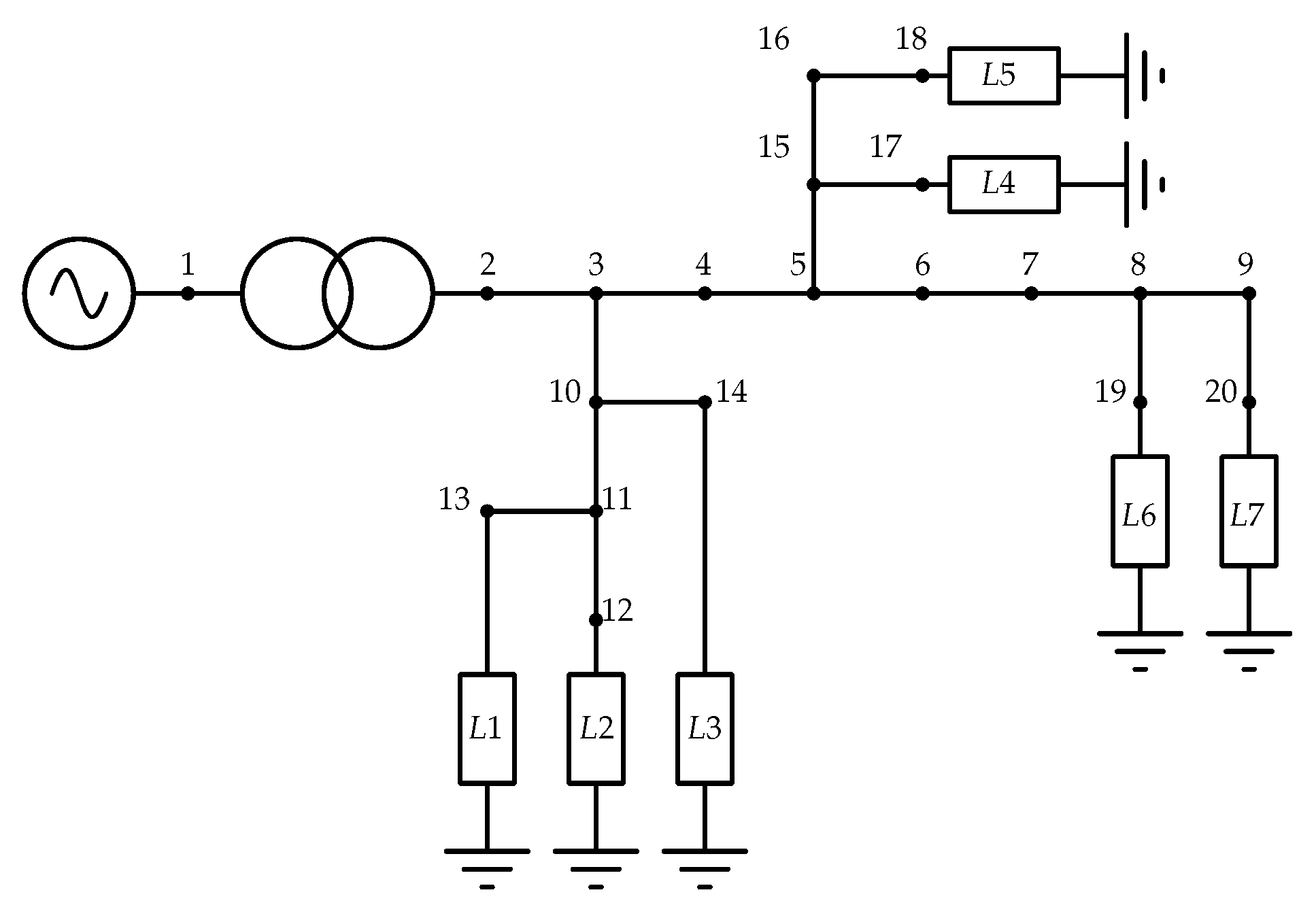
4.1. The Simulated Circuit
4.2. Analysis of the Sensitivity of EKF-Based Inertia Estimation Method to the Assumed Time of Disturbance
5. Conclusions
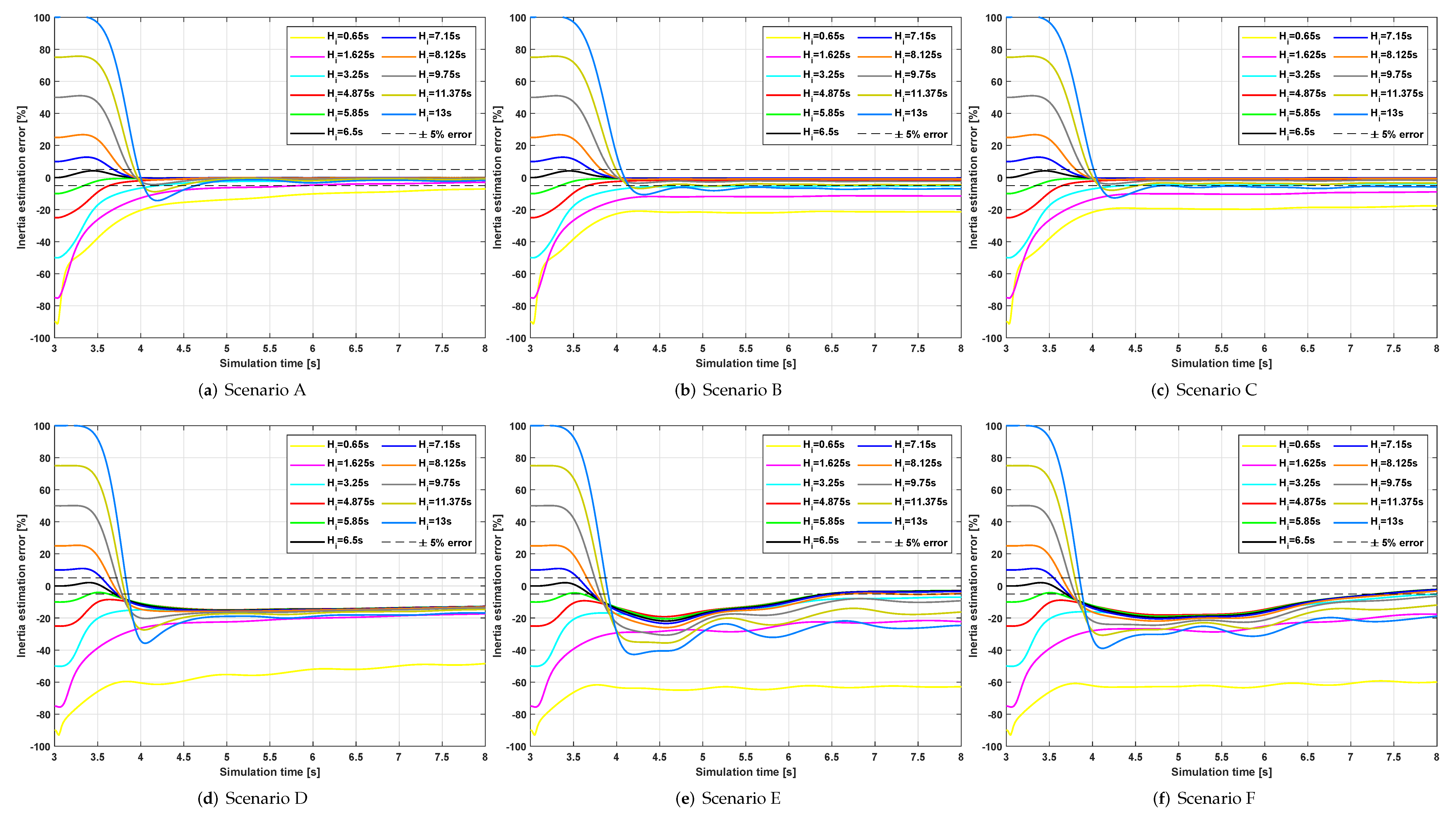
- The number of prediction and correction phases required to bring the final inertia estimate to convergence increases with the magnitude of the initial inertia estimation error. Therefore, depending on the use time of the filter and on the initially assumed inertia constant, the final inertia estimation error could still be too high, as the inertia estimate has not yet reached convergence. Moreover, the estimation process strongly benefits from the measurement samples pertaining to the inertial response of the synchronous generator. Considering a fixed use time of the filter, a wrong time of disturbance estimation implies that less measurements belonging to that phase may be used. In turn, this decreases the estimation accuracy of the EKF and worsens the final inertia estimate in case of high initial estimation errors, as well. To sum up, the higher the initial inertia constant estimation error used to start the filter, the higher the estimation errors and the sensitivity of the method to the assumed time of disturbance.
- The use time of the filter has an overall beneficial effect on the inertia estimates, both in terms of accuracy and of sensitivity to the assumed time of disturbance.
- In general, the method is more sensitive to time of disturbance underestimation than overestimation. In particular, when primary frequency regulation is absent, such sensitivity reduces as the use time of the filter increases. On the contrary, if primary frequency regulation is activated, the faster such control, the higher the inertia estimation error in case of time of disturbance overestimation.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Connection | 3-ph -Y Grounded | |
|---|---|---|
| 300 | ||
| 20 | ||
| 0.4 | ||
| 0.032 | ||
| Load | Rated Power kVA | Power Factor |
|---|---|---|
| L1 | 30 | 0.85 |
| L2 | 8 | 0.85 |
| L3 | 25 | 0.85 |
| L4 | 16 | 0.85 |
| L5 | 8 | 0.85 |
| L6 | 25 | 0.85 |
| L7 | 20 | 0.85 |
| From Node | To Node | Ω/km | Ω/km | Ω/km | Ω/km | L m |
|---|---|---|---|---|---|---|
| 1 | 2 | 0.387 | 0.295 | 0.619 | 0.472 | 30 |
| 2 | 3 | 0.387 | 0.295 | 0.619 | 0.472 | 30 |
| 3 | 4 | 0.387 | 0.295 | 0.619 | 0.472 | 30 |
| 4 | 5 | 0.387 | 0.295 | 0.619 | 0.472 | 30 |
| 5 | 6 | 0.524 | 0.307 | 0.838 | 0.491 | 30 |
| 6 | 7 | 0.524 | 0.307 | 0.838 | 0.491 | 30 |
| 7 | 8 | 0.524 | 0.307 | 0.838 | 0.491 | 30 |
| 8 | 9 | 0.524 | 0.307 | 0.838 | 0.491 | 30 |
| 3 | 10 | 0.524 | 0.307 | 0.838 | 0.491 | 30 |
| 10 | 11 | 1.150 | 0.332 | 0.838 | 0.491 | 30 |
| 11 | 12 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 11 | 13 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 10 | 14 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 5 | 15 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 15 | 16 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 15 | 17 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 16 | 18 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 8 | 19 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| 9 | 20 | 1.150 | 0.332 | 1.840 | 0.531 | 30 |
| Pole pairs | 2 | |
| 1 | ||
| 20 | ||
| 50 | ||
| H | 6.5 | |
| D | 0 | |
| 0.0025 | ||
| 1.8 | ||
| 0.3 | ||
| 0.25 | ||
| 1.7 | ||
| 0.55 | ||
| 0.25 | ||
| 0.2 | ||
| 8.0 | ||
| 0.03 | ||
| 0.4 | ||
| 0.05 | ||
References
- Ørum, E.; Kuivaniemi, M.; Laasonen, M.; Bruseth, A.I.; Jansson, E.A.; Danell, A.; Elkington, K.; Modig, N. Future System Inertia; Technical Report; ENTSOE: Brussels, Belgium, 2015. [Google Scholar]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Huang, Z.; Du, P.; Kosterev, D.; Yang, B. Application of Extended Kalman Filter Techniques for Dynamic Model Parameter Calibration. In Proceedings of the IEEE Power and Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8. [Google Scholar]
- Kalsi, K.; Sun, Y.; Huang, Z.; Du, P.; Diao, R.; Anderson, K.K.; Li, Y.; Lee, B. Calibrating Multi-machine Power System Parameters with the Extended Kalman Filter. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Huang, Z.; Du, P.; Kosterev, D.; Yang, S. Generator Dynamic Model Validation and Parameter Calibration Using Phasor Measurements at the Point of Connection. IEEE Trans. Power Syst. 2013, 28, 1939–1949. [Google Scholar] [CrossRef]
- Aghamolki, H.G.; Miao, Z.; Fan, L.; Jiang, W.; Manjure, D. Identification of synchronous generator model with frequency control using unscented Kalman filter. Electr. Power Syst. Res. 2015, 126, 45–55. [Google Scholar] [CrossRef]
- Zhou, N.; Meng, D.; Huang, Z.; Welch, G. Dynamic State Estimation of a Synchronous Machine Using PMU Data: A Comparative Study. IEEE Trans. Smart Grid 2015, 6, 450–460. [Google Scholar] [CrossRef]
- Ariff, M.A.M.; Pal, B.C.; Singh, A.K. Estimating Dynamic Model Parameters for Adaptive Protection and Control in Power System. IEEE Trans. Power Syst. 2015, 30, 829–839. [Google Scholar] [CrossRef]
- Fan, L.; Wehbe, Y. Extended Kalman filtering based real-time dynamic state and parameter estimation using PMU data. Electr. Power Syst. Res. 2013, 103, 168–177. [Google Scholar] [CrossRef]
- Rhodes, I.B. A Tutorial Introduction to Estimation and Filtering. IEEE Trans. Autom. Control 1971, 16, 688–706. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Technical Report TR 95-041; University of North Carolina: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Inoue, T.; Taniguchi, H.; Ikeguchi, Y.; Yoshida, K. Estimation of Power System Inertia Constant and Capacity of Spinning-reserve Support Generators Using Measured Frequency Transients. IEEE Trans. Power Syst. 1997, 12, 136–143. [Google Scholar] [CrossRef]
- Wall, P.; Gonzalez-Longatt, F.; Terzija, V. Estimation of generator inertia available during a disturbance. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Wall, P.; Regulski, P.; Rusidovic, Z.; Terzija, V. Inertia estimation using PMUs in a Laboratory. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, Washington, DC, USA, 17–20 February 2015; pp. 1–6. [Google Scholar]
- Wall, P.; Terzija, V. Simultaneous Estimation of the Time of Disturbance and Inertia in Power Systems. IEEE Trans. Power Deliv. 2014, 29, 2018–2031. [Google Scholar] [CrossRef]
- Strunz, K. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; Technical Report 575, CIGRÉ TF C6.04.02; CIGRÉ: Paris, France, 2014. [Google Scholar]









| Case ID | Generator Model | Primary Frequency Regulation Activation |
|---|---|---|
| A | Simplified | ✘ |
| B | Simplified | ✔ (, ) |
| C | Simplified | ✔ (, ) |
| D | Complete | ✘ |
| E | Complete | ✔ (, ) |
| F | Complete | ✔ (, ) |
| A | samples | 30 |
| N | samples | 3 |
| — | 0.5 | |
| 13 | ||
| 0 | ||
| — | 0.2 | |
| 1/ | 0.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
del Giudice, D.; Grillo, S. Analysis of the Sensitivity of Extended Kalman Filter-Based Inertia Estimation Method to the Assumed Time of Disturbance. Energies 2019, 12, 483. https://doi.org/10.3390/en12030483
del Giudice D, Grillo S. Analysis of the Sensitivity of Extended Kalman Filter-Based Inertia Estimation Method to the Assumed Time of Disturbance. Energies. 2019; 12(3):483. https://doi.org/10.3390/en12030483
Chicago/Turabian Styledel Giudice, Davide, and Samuele Grillo. 2019. "Analysis of the Sensitivity of Extended Kalman Filter-Based Inertia Estimation Method to the Assumed Time of Disturbance" Energies 12, no. 3: 483. https://doi.org/10.3390/en12030483
APA Styledel Giudice, D., & Grillo, S. (2019). Analysis of the Sensitivity of Extended Kalman Filter-Based Inertia Estimation Method to the Assumed Time of Disturbance. Energies, 12(3), 483. https://doi.org/10.3390/en12030483