An Enhanced Two-Stage Grid-Connected Linear Parameter Varying Photovoltaic System Model for Frequency Support Strategy Evaluation


Abstract

1. Introduction
2. PV System
2.1. PV System Modelling
2.2. PV System EMT Model
3. LPV Model Development
3.1. Linearisation
3.2. Interpolation of Grid Points
3.3. LPV PV System Model
4. Model Validation
Results
5. Network Simulations
- Maximum power point tracker (MPPT) operation with no frequency support provided.
- A P(f) droop characteristic for frequency support.
5.1. Three-Phase Network Description
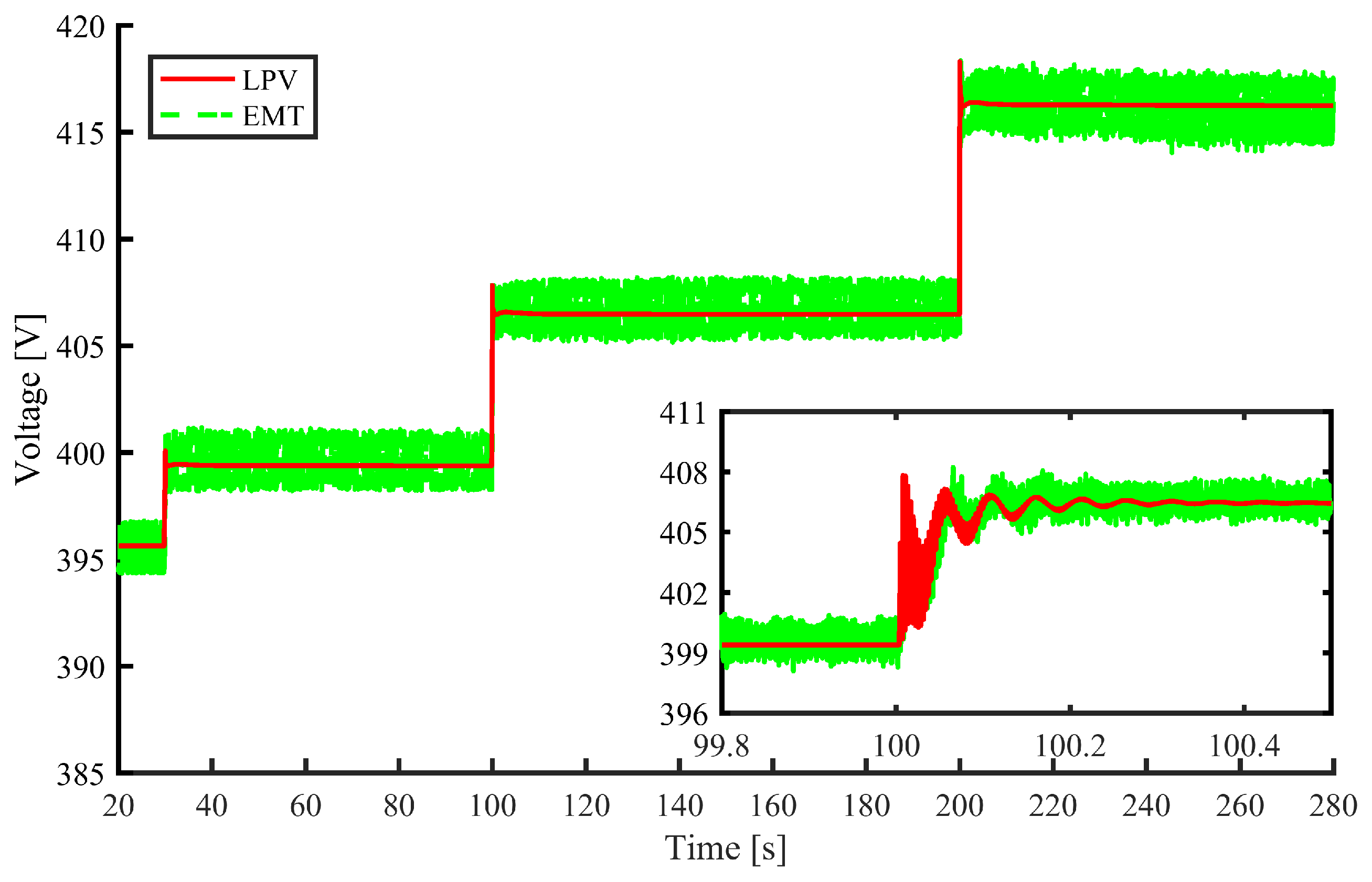
5.2. Response to Increasing Solar Irradiation
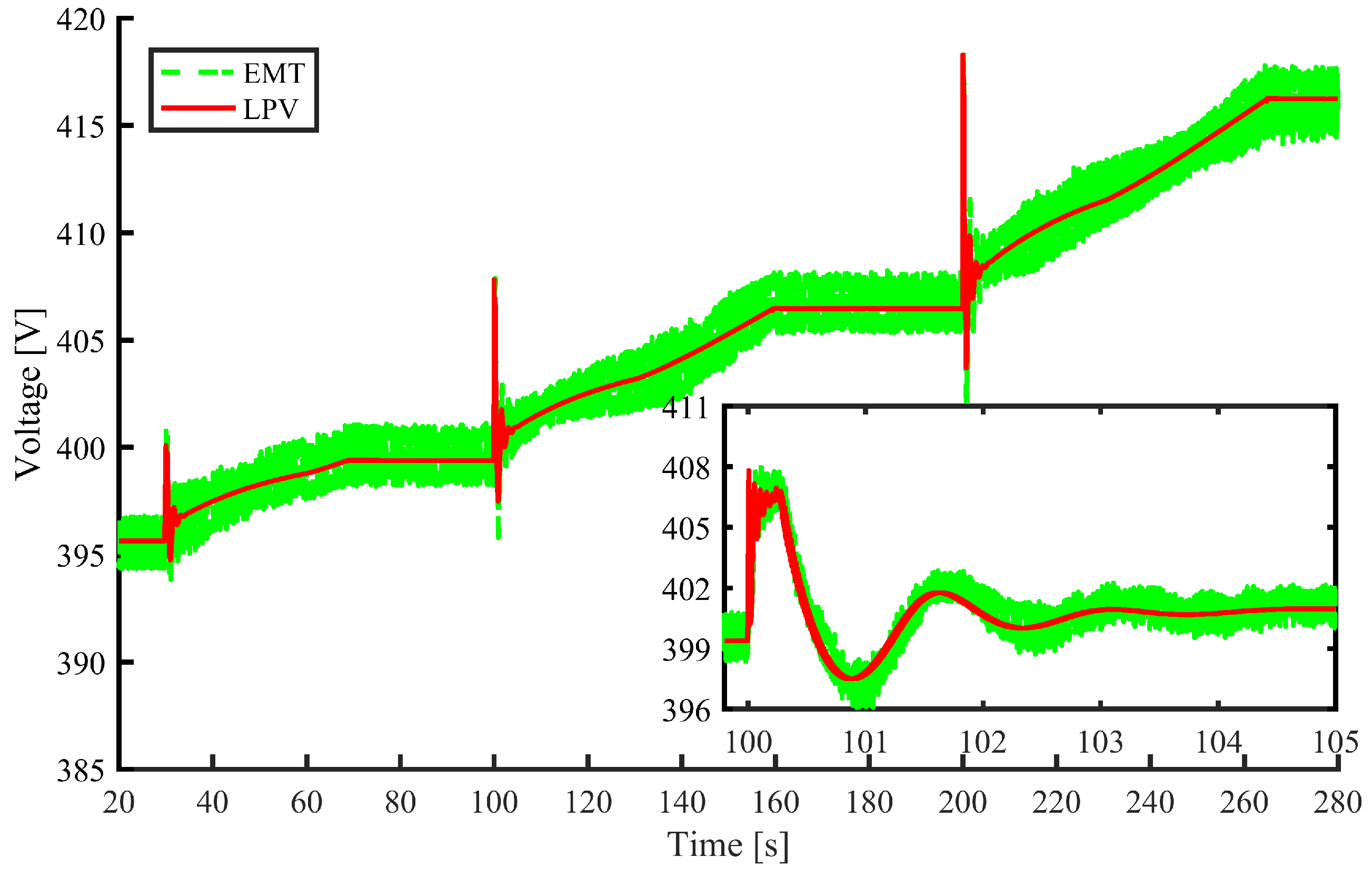
5.3. Response to Decreasing Solar Irradiation with Active Power Reserves
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sawin, J.L.; Seyboth, K.; Sverrisson, F.; Rana, A.; Murdock, H.E.; Fabiani, A.; Adam, B. Renewables 2017 global status report. In Advancing the Global Renewable Energy Transition; REN21: Paris, France, 2017; p. 45. [Google Scholar]
- SolarPower Europe. Global Market Outlook For Solar Power: 2018–2022. Available online: http://www.solarpowereurope.org (accessed on 21 February 2019).
- McCrone, A. Clean Energy’s Decade Nearly Gone, and Its Decade Ahead. BloombergNEF. 2019. Available online: https://about.bnef.com (accessed on 31 October 2019).
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.M.; Hannegan, B. Achieving a 100% Renewable Grid: Operating Electric Power Systems with Extremely High Levels of Variable Renewable Energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- REserviceS. Economic Grid Support Services by Wind and Solar PV. Available online: https://www.reservices-project.eu/wp-content/uploads/REserviceS-authors-correction.pdf (accessed on 1 September 2019).
- Rahmann, C.; Castillo, A. Fast frequency response capability of photovoltaic power plants: The necessity of new grid requirements and definitions. Energies 2014, 10, 6306–6322. [Google Scholar] [CrossRef]
- EirGrid and SoNi. RoCoF Alternative & Complementary Solutions Project. Available online: http://www.eirgridgroup.com/site-files/library/EirGrid/DS3-RoCoF-Alternatives-Solutions-Project-Phase-2-Overview-Final.pdf (accessed on 1 September 2019).
- Delille, G.; François, B.; Malarange, G. Dynamic frequency control support by energy storage to reduce the impact of wind and solar generation on isolated power system’s inertia. IEEE Tran. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Nguyen, G.; Minh, T.; Kenko, U. A two-level control strategy with fuzzy logic for large-scale photovoltaic farms to support grid frequency regulation. Control. Eng. Pract. 2017, 59, 77–99. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Saad, M. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Seneviratne, C.; Ozansoy, C. Frequency response due to a large generator loss with the increasing penetration of wind/PV generation—A literature review. Renew. Sustain. Energy Rev. 2017, 57, 659–668. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Renew. Sustain. Energy Rev. 2017, 7, 654. [Google Scholar]
- Batzelis, E.I.; Kampitsis, G.E.; Papathanassiou, S.A. Power Reserves Control for PV Systems with Real-Time MPP Estimation via Curve Fitting. IEEE Trans. Sustain. Energy 2017, 8, 1269–1280. [Google Scholar] [CrossRef]
- Xin, H.; Liu, Y.; Wang, Z.; Gan, D.; Yang, T. A new frequency regulation strategy for photovoltaic systems without energy storage. IEEE Trans. Sustain. Energy 2013, 4, 985–993. [Google Scholar] [CrossRef]
- Hoke, A.; Shirazi, M.; Chakraborty, S.; Muljadi, E.; Maksimovic, D. Rapid Active Power Control of Photovoltaic Systems for Grid Frequency Support. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1154–1163. [Google Scholar] [CrossRef]
- Nanou, S.I.; Papakonstantinou, A.G.; Papathanassiou, S.A. A generic model of two-stage grid-connected PV systems with primary frequency response and inertia emulation. Electr. Pow Syst. Res. 2015, 127, 186–196. [Google Scholar] [CrossRef]
- Hernández, J.C.; Bueno, P.G.; Sanchez-sutil, F. Enhanced utility-scale photovoltaic units with frequency support functions and dynamic grid support for transmission systems. IET Renew. Power Gener 2017, 11, 361–372. [Google Scholar] [CrossRef]
- Craciun, B.I.; Kerekes, T.; Sera, D.; Teodorescu, R. Frequency support functions in large PV power plants with active power reserves. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 849–858. [Google Scholar] [CrossRef]
- Alsharafi, A.S.; Besheer, A.H.; Emara, H.M. Primary Frequency Response Enhancement for Future Low Inertia Power Systems Using Hybrid Control Technique. Energies 2018, 11, 699. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2017, 33, 8488–8499. [Google Scholar] [CrossRef]
- Zarina, P.P.; Mishra, S.; Sekhar, P.C. Exploring frequency control capability of a PV system in a hybrid PV-rotating machine-without storage system. Int. J. Electr. Power Energy Syst. 2014, 60, 258–267. [Google Scholar] [CrossRef]
- Hariri, A.; Faruque, M.O. A Hybrid Simulation Tool for the Study of PV Integration Impacts on Distribution Networks. IEEE Trans. Sustain. Energy 2017, 2, 648–657. [Google Scholar] [CrossRef]
- Patsalides, M.; Efthymiou, V.; Stavrou, A.; Georghiou, G.E. A generic transient PV system model for power quality studies. Renew. Energy 2016, 89, 526–542. [Google Scholar] [CrossRef]
- Baimel, D.; Belikov, J.; Guerrero, J.M.; Levron, Y. Dynamic Modeling of Networks, Microgrids, and Renewable Sources in the dq0 Reference Frame: A Survey. IEEE Access 2017, 5, 21323–21335. [Google Scholar] [CrossRef]
- Belikov, J.; Levron, Y. Comparison of time-varying phasor and dq0 dynamic models for large transmission networks. Int. J. Electr. Power Energy Syst. 2017, 5, 65–74. [Google Scholar] [CrossRef]
- Levis, C.; O’Loughlin, C.; O’Donnell, T.; Hill, M. A comprehensive state-space model of two-stage grid-connected PV systems in transient network analysis. Int. J. Electr. Power Energy Syst. 2019, 110, 441–453. [Google Scholar] [CrossRef]
- Villalva, M.G.; de Siqueira, T.G.; Ruppert, E. Voltage regulation of photovoltaic arrays: Small-signal analysis and control design. IET Power Electron. 2010, 3, 869–880. [Google Scholar] [CrossRef]
- Seddik, B.; Iulian, M.; Iulana, B.A. Power Electronic Converters Modelling and Control: With Case Studies; Springer: London, UK, 2014; p. 454. [Google Scholar]
- Tóth, R. Modeling and Identification of Linear Parameter-Varying Systems an Orthonormal Basis Function Approach. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2008; p. 382. [Google Scholar]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive Approach to Modeling and Simulation of Photovoltaic Arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Ayop, R.; Tan, C.W. A comprehensive review on photovoltaic emulator. Renew. Sustain. Energy Rev. 2017, 80, 430–452. [Google Scholar] [CrossRef]
- Di Fazio, A.R.; Russo, M. Photovoltaic generator modelling to improve numerical robustness of EMT simulation. Electr. Power Syst. Res. 2012, 83, 136–143. [Google Scholar] [CrossRef]
- NREL. System Advisor Model (SAM). Available online: https://github.com/NREL/SAM/tree/develop/deploy/libraries (accessed on 2 August 2018).
- Helmersson, A. Methods for Robust Gain Scheduling. Ph.D. Thesis, Linköping University, Linköping, Sweden, 1995; p. 238. [Google Scholar]
- Luspay, T.; Péni, T.; Gőzse, I.; Szabó, Z.; Vanek, B. Model reduction for LPV systems based on approximate modal decomposition. Int. J. Numer. Meth. Eng. 2018, 113, 891–909. [Google Scholar] [CrossRef]
- CIGRE. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; Task Force C6.04; REN21: Paris, France, 2014; p. 119. ISBN 9782858732708. [Google Scholar]
- IEEE Power & Energy Society. Technical Report IEEE Std 1110-2002. In IEEE Guide for Synchronous Generator Modeling Practices and Applications in Power System Stability Analyses; IEEE: New York, NY, USA, 2003; p. 81. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill Education-Europe: New York, NY, USA, 1994; p. 1167. ISBN 9780070359581. [Google Scholar]
- NEPLAN AG. Turbine-Governor Models, Standard Dynamic Turbine-Governor Systems in NEPLAN Power System Analysis Tool; NEPLAN: CH-8700 Küsnacht (ZH), Switzerland, 2013; p. 98. [Google Scholar]
- EirGrid. EirGrid Grid Code, Version 7.0; Available online: http://www.eirgridgroup.com/site-files/library/EirGrid/GC_VERSION_7_PUBLISHED.pdf (accessed on 1 September 2019).
- IEEE Standards. IEEE Recommended Practice for Excitation System Models for Power System Stability Studies; IEEE std 4215-1992; IEEE: Piscataway, NJ, USA, 1992; p. 51. [Google Scholar]
- IEEE Power & Energy Society. IEEE Recommended Practice for Excitation System Models for Power System Stability Studies; IEEE Std 421.5-2016 (Revision of IEEE Std 421.5-2005); IEEE: Piscataway, NJ, USA, 2016; p. 207. [Google Scholar]
- Hou, X.; Sun, Y.; Yuan, W.; Han, H.; Zhong, C.; Guerrero, J.M. Conventional P-ω/Q-V Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid. Energies 2016, 9, 943. [Google Scholar] [CrossRef]
- Liu, X.; Cramer, A.M.; Liao, Y. Reactive power control methods for photovoltaic inverters to mitigate short-term voltage magnitude fluctuations. Electr. Power Syst. Res. 2015, 127, 213–220. [Google Scholar] [CrossRef]






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conductor | Size | R at 50 °C | X | Length |
|---|---|---|---|---|
| ID | mm2 | Ω/km | Ω/km | m |
| OH1 | 19 × 70 mm2 | 0.491 | 0.2716 | 60 |
| OH2 | 7 × 25 mm2 | 1.320 | 0.3066 | 60 |
| OH3 | 7 × 16 mm2 | 2.016 | 0.3197 | 60 |
| Paramater | Value | Paramater | Value | Paramater | Value |
|---|---|---|---|---|---|
| 5ms | 0.5s | 0.58 | |||
| 2.62 | 0.075 | 20ms | |||
| 1ms | 350 | 1ms | |||
| 0.025 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Levis, C.; O’Loughlin, C.; O’Donnell, T.; Hill, M. An Enhanced Two-Stage Grid-Connected Linear Parameter Varying Photovoltaic System Model for Frequency Support Strategy Evaluation. Energies 2019, 12, 4739. https://doi.org/10.3390/en12244739
Levis C, O’Loughlin C, O’Donnell T, Hill M. An Enhanced Two-Stage Grid-Connected Linear Parameter Varying Photovoltaic System Model for Frequency Support Strategy Evaluation. Energies. 2019; 12(24):4739. https://doi.org/10.3390/en12244739
Chicago/Turabian StyleLevis, Colin, Cathal O’Loughlin, Terence O’Donnell, and Martin Hill. 2019. "An Enhanced Two-Stage Grid-Connected Linear Parameter Varying Photovoltaic System Model for Frequency Support Strategy Evaluation" Energies 12, no. 24: 4739. https://doi.org/10.3390/en12244739
APA StyleLevis, C., O’Loughlin, C., O’Donnell, T., & Hill, M. (2019). An Enhanced Two-Stage Grid-Connected Linear Parameter Varying Photovoltaic System Model for Frequency Support Strategy Evaluation. Energies, 12(24), 4739. https://doi.org/10.3390/en12244739