Prediction of PWM-Induced Current Ripple in Subdivided Stator Windings Using Admittance Analysis



Abstract
:1. Introduction
2. Current Ripple Assessment
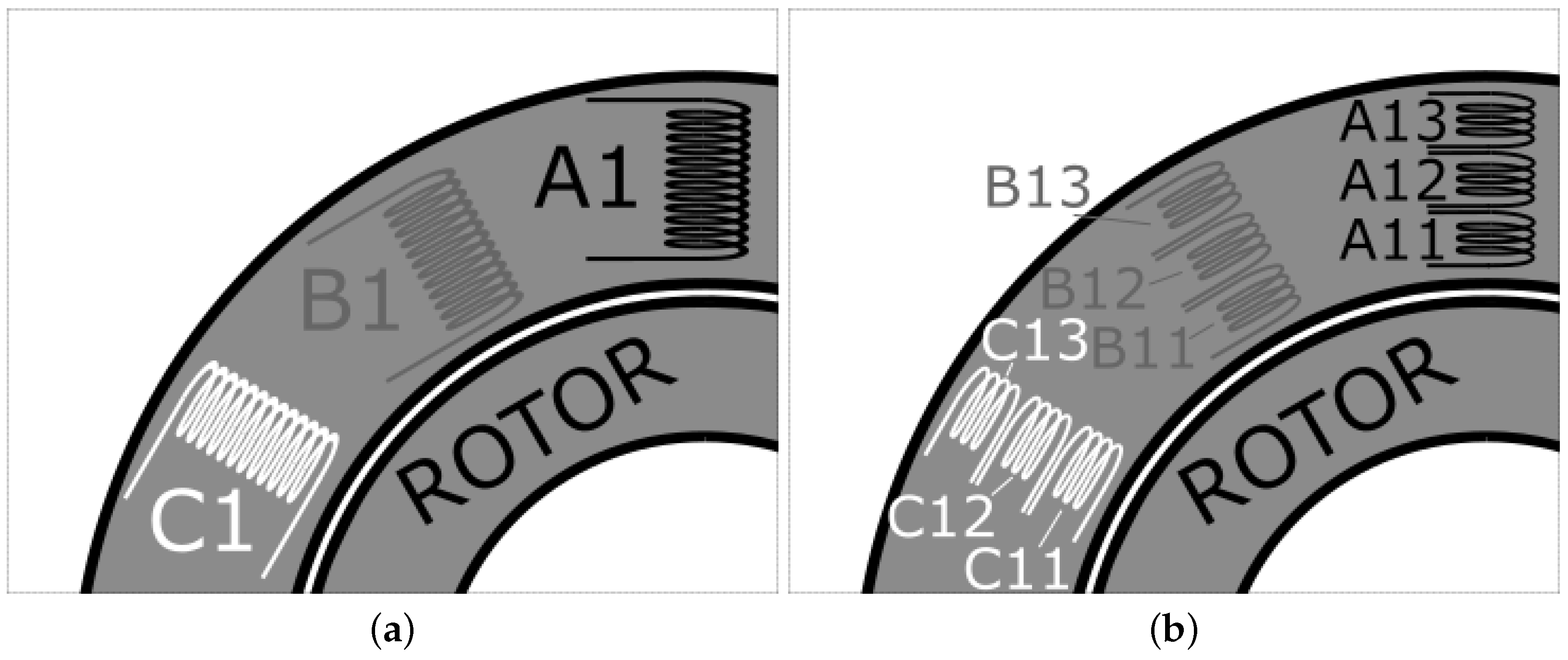
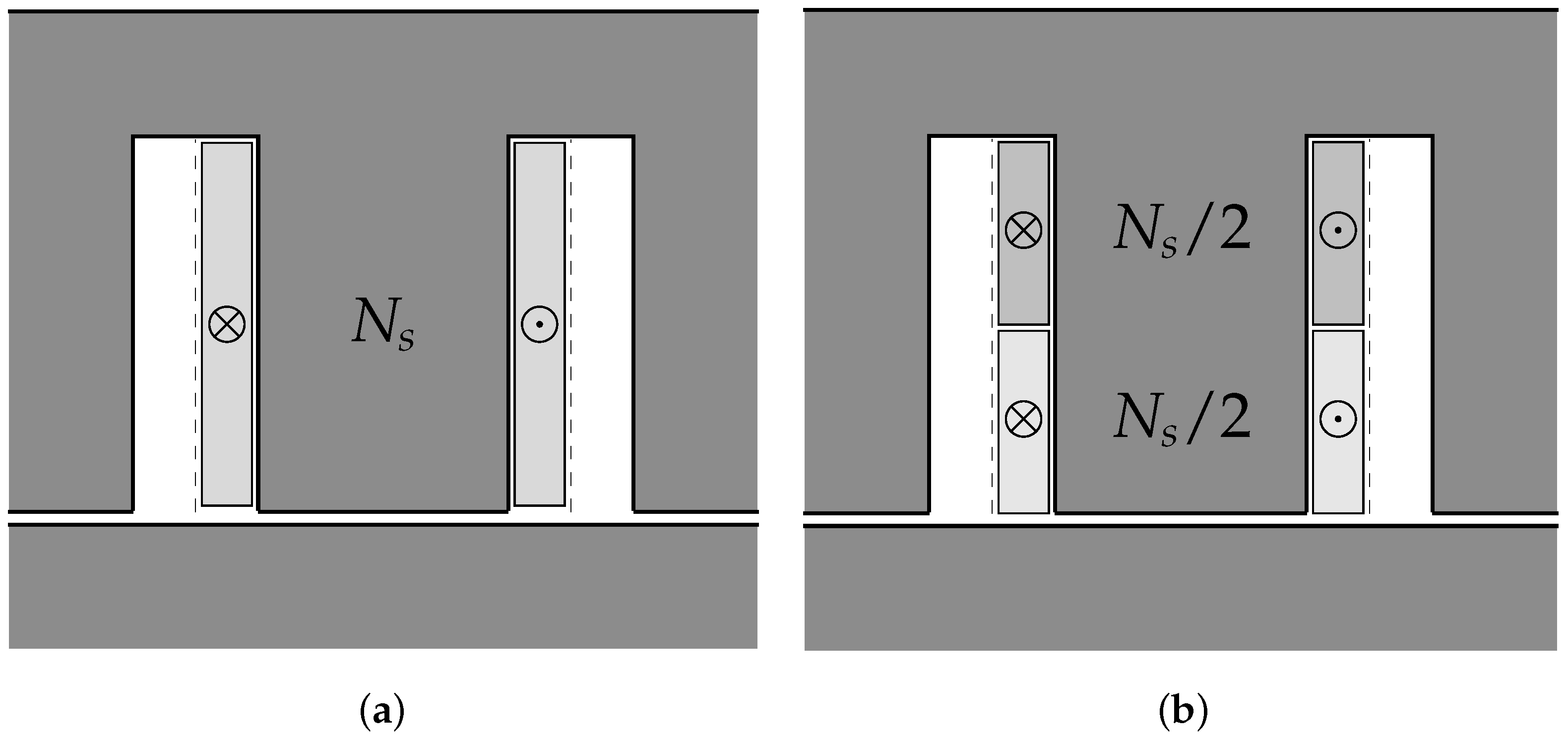
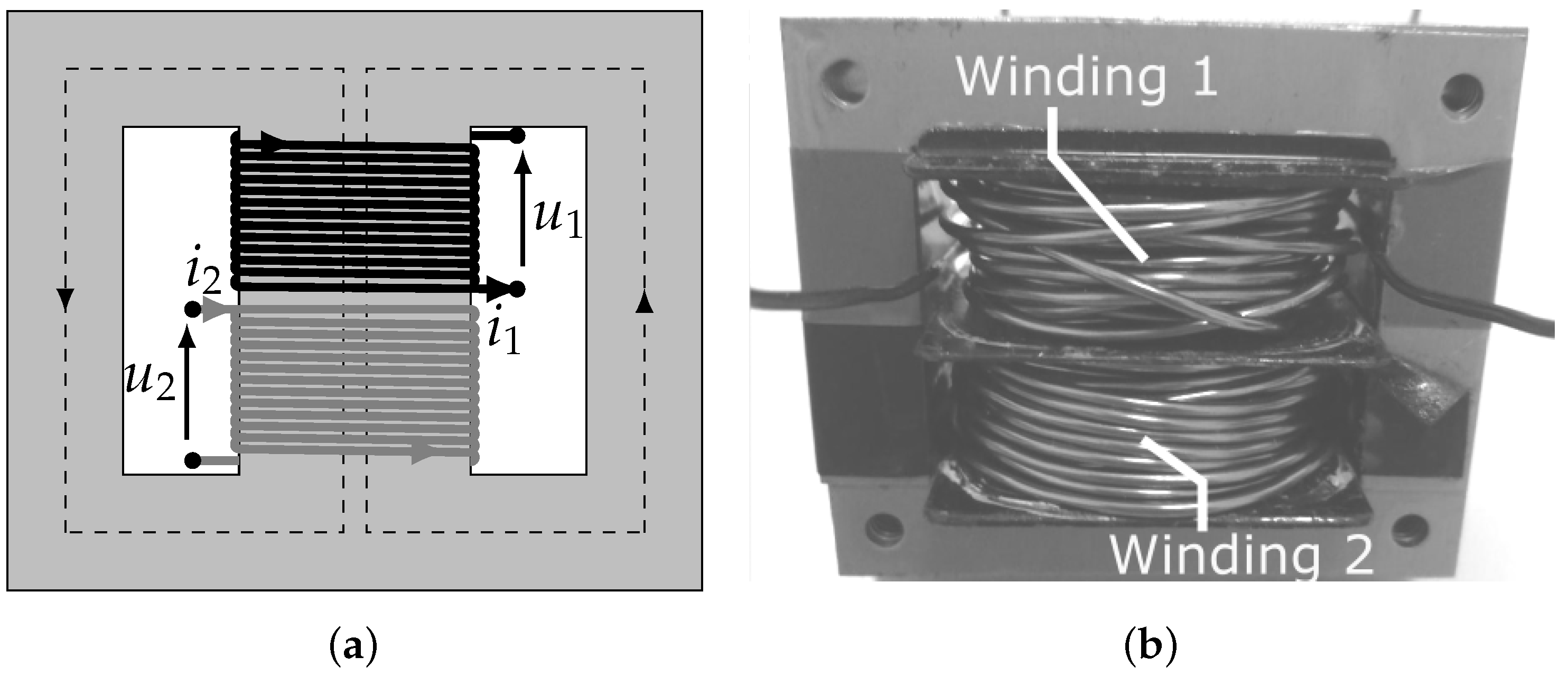
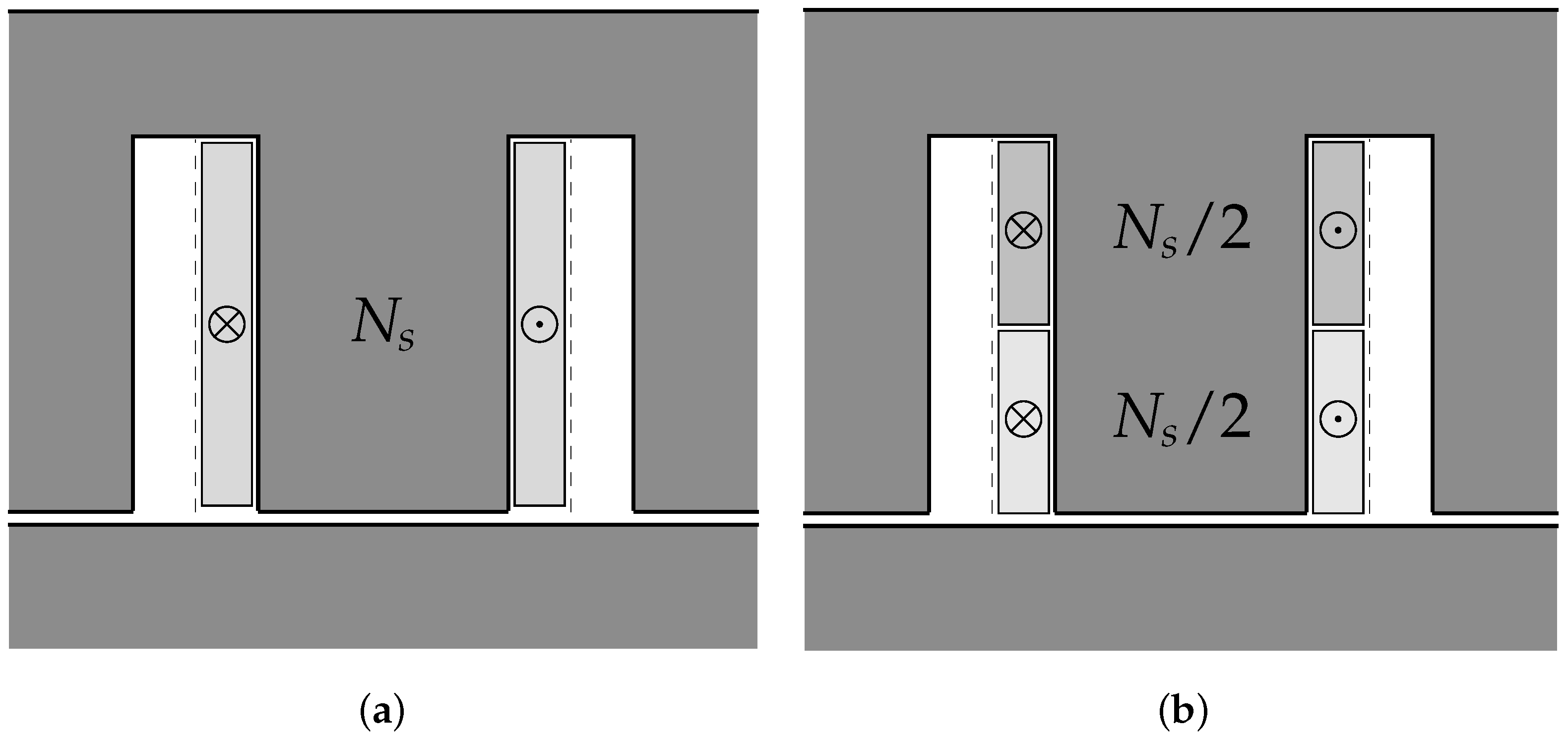
2.1. Defaults in Winding Subdivision Use
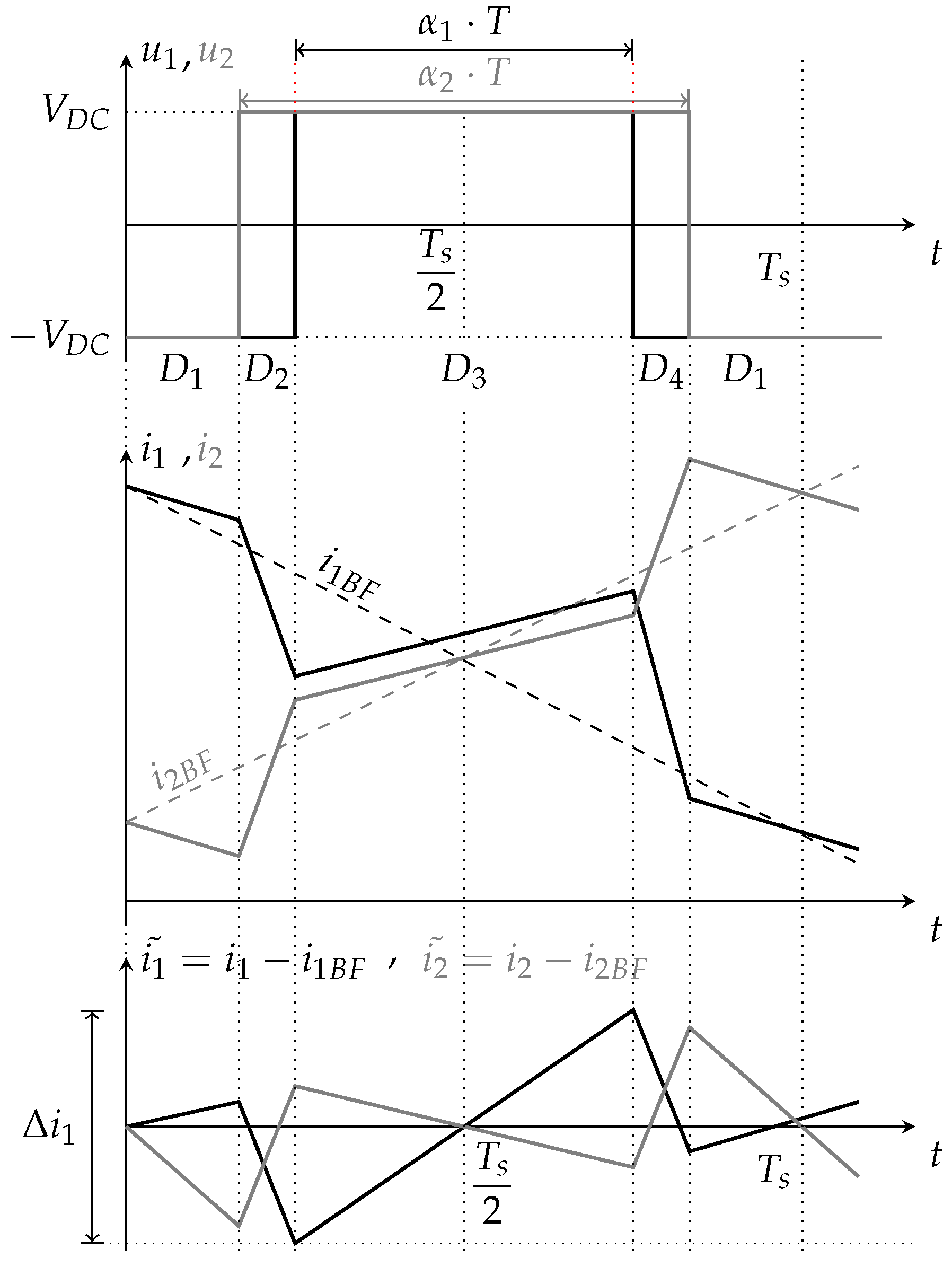
2.2. Delay
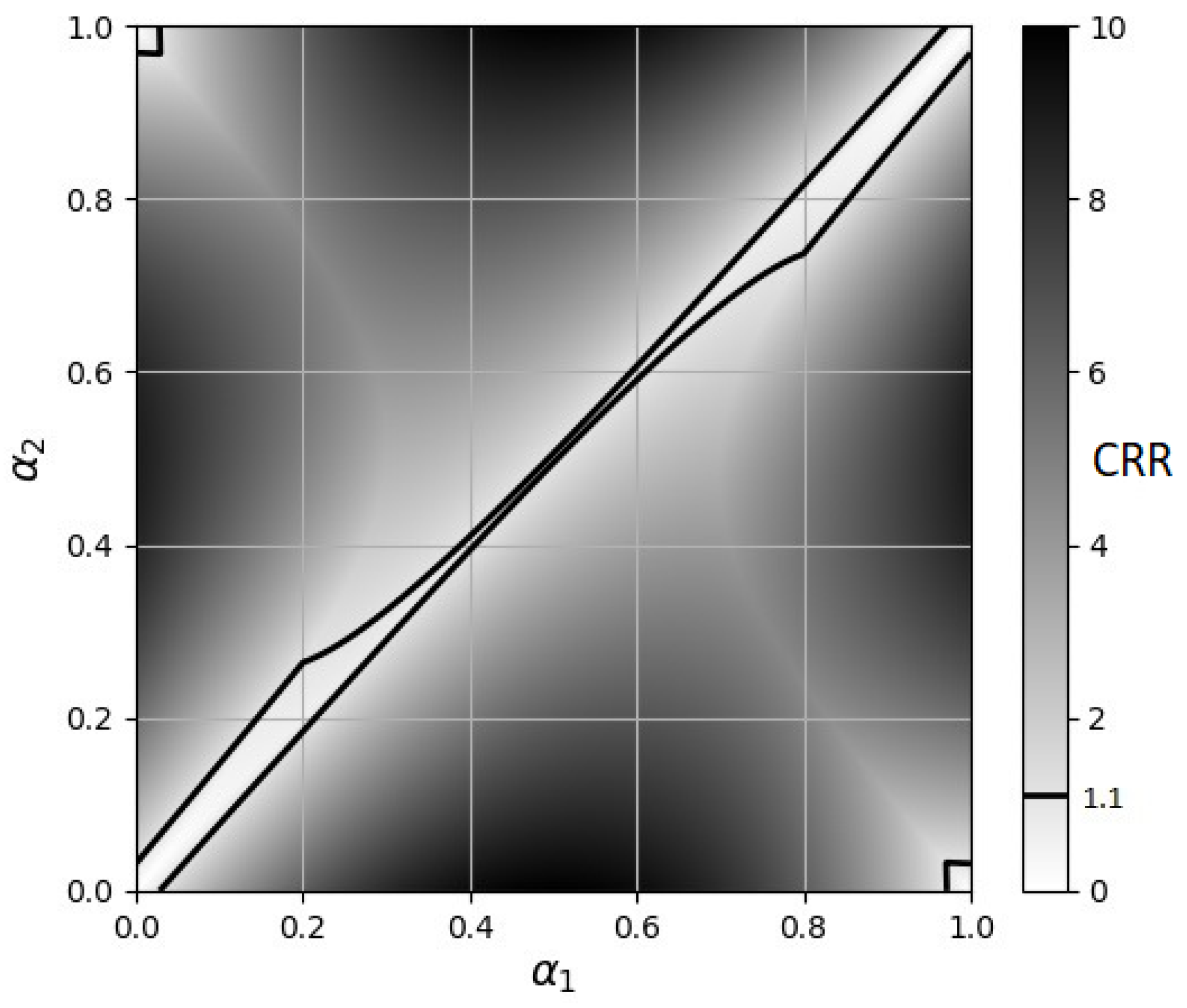
2.3. Duty-Cycle Difference
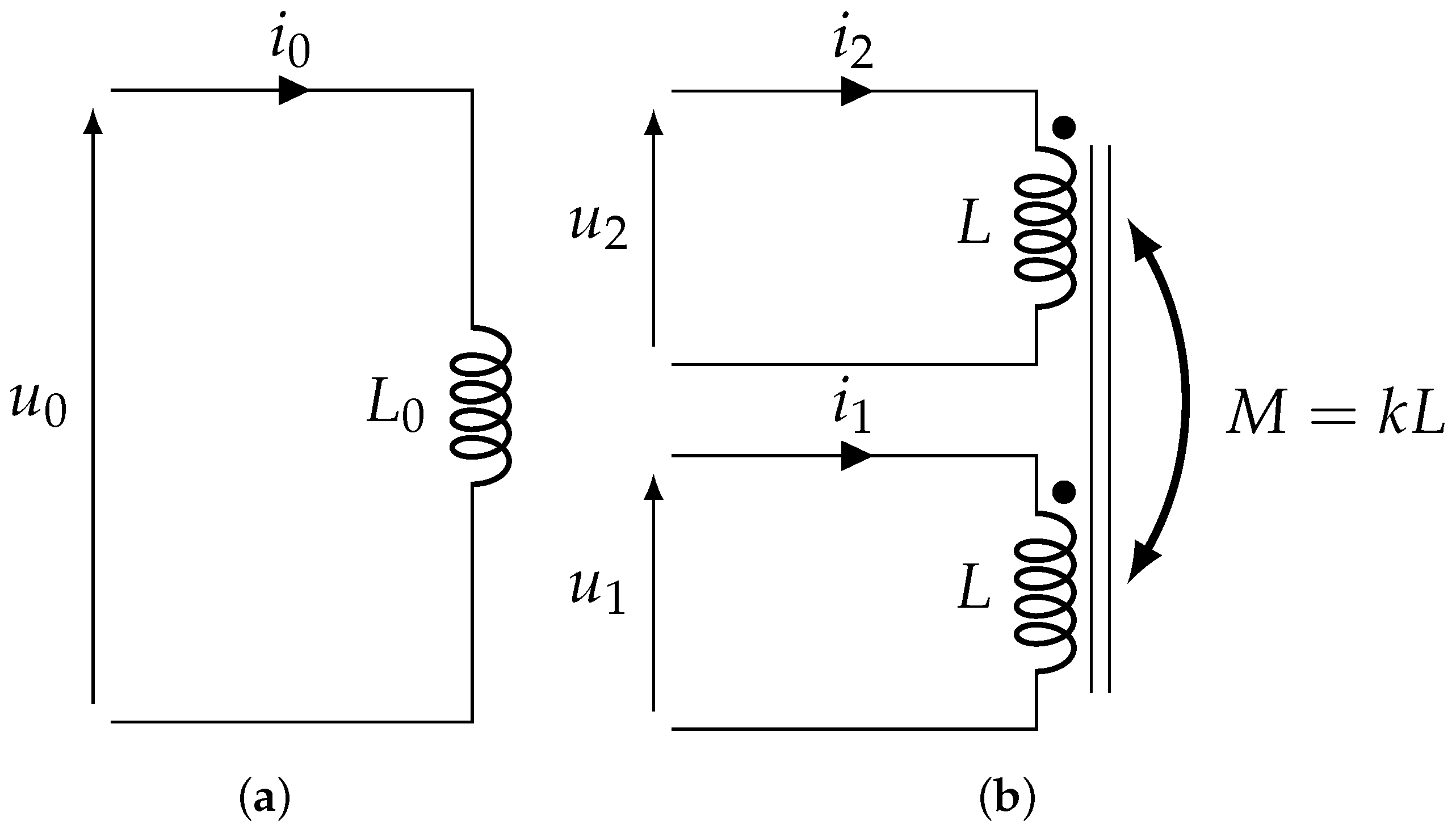
3. Current Ripple Estimation from Admittance Measurements
3.1. Current Harmonics Computation
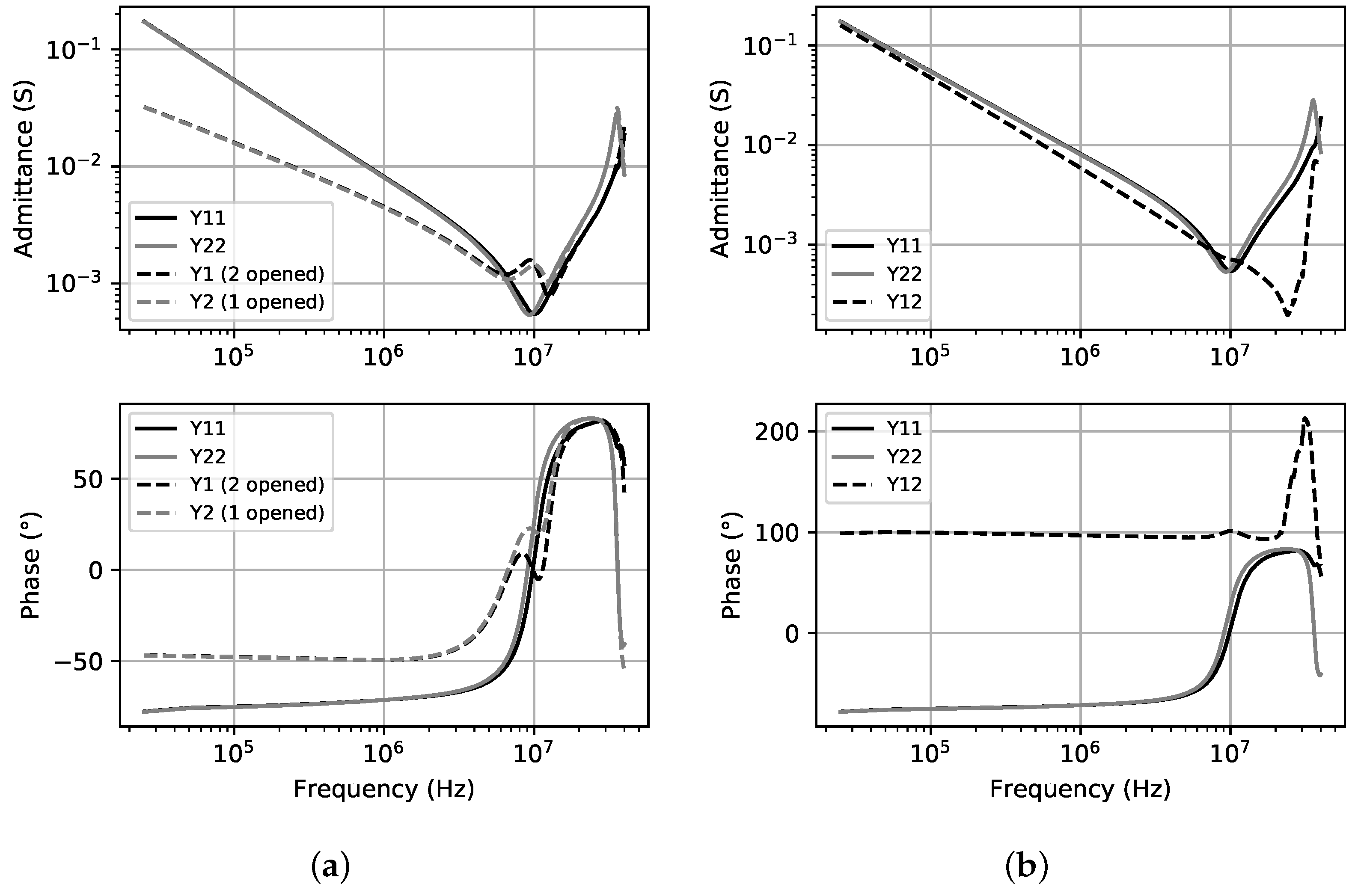
3.2. Admittance Matrix Measurements
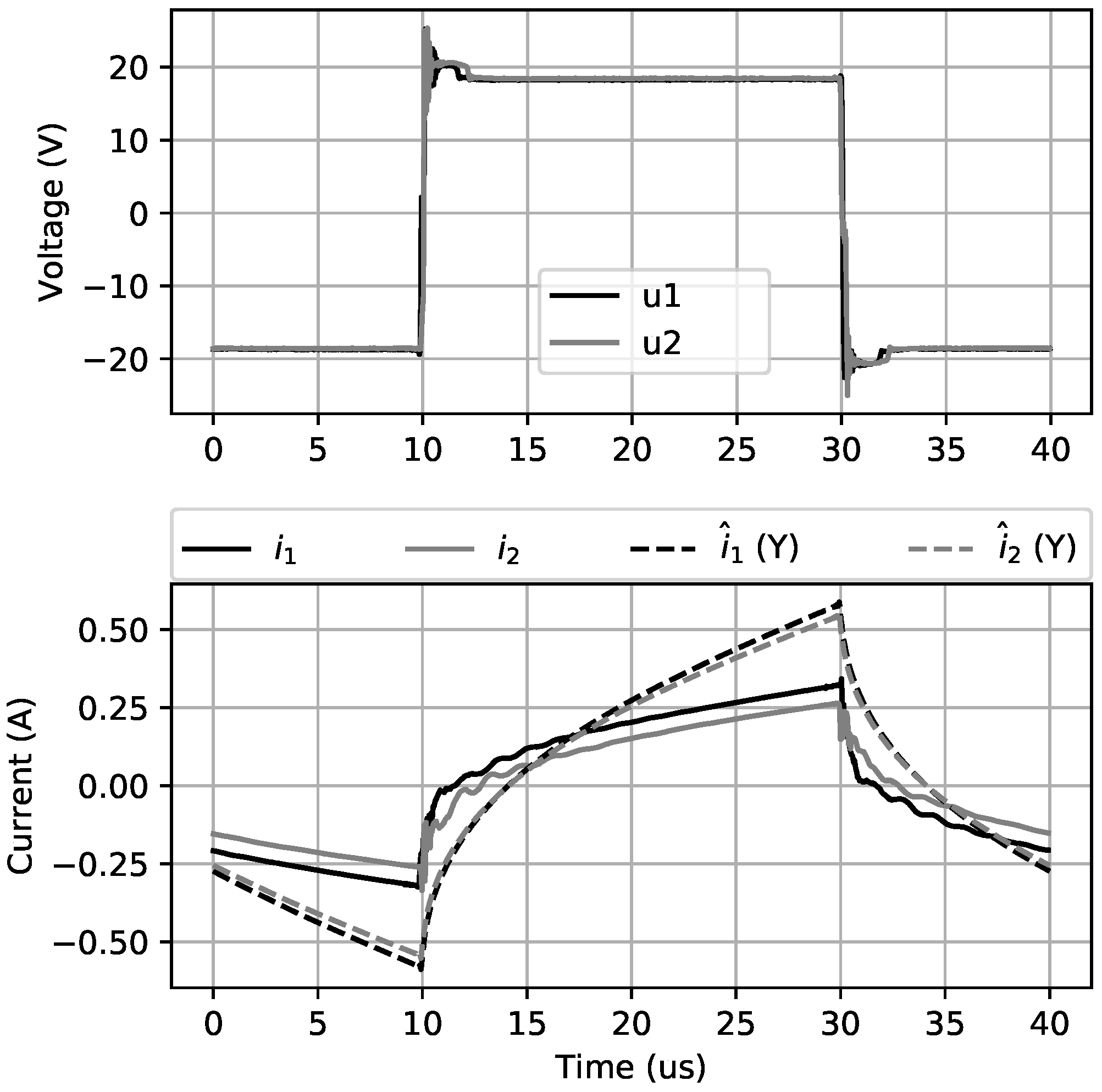
3.3. Comparison of Estimated Current Shape
4. PWM-Induced Current Ripple: Experimental Validation and Losses Estimation
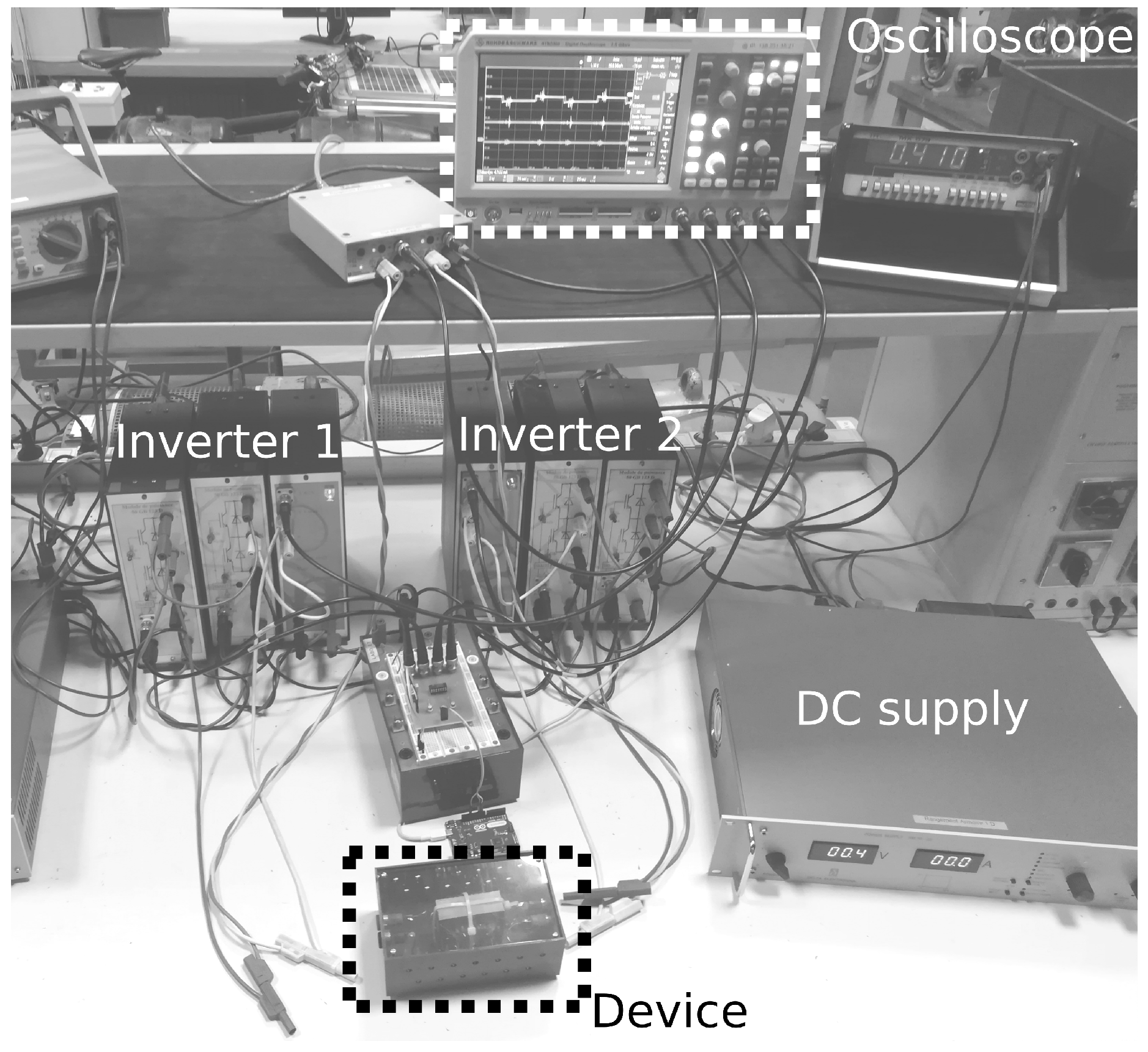
4.1. Experimental Setup
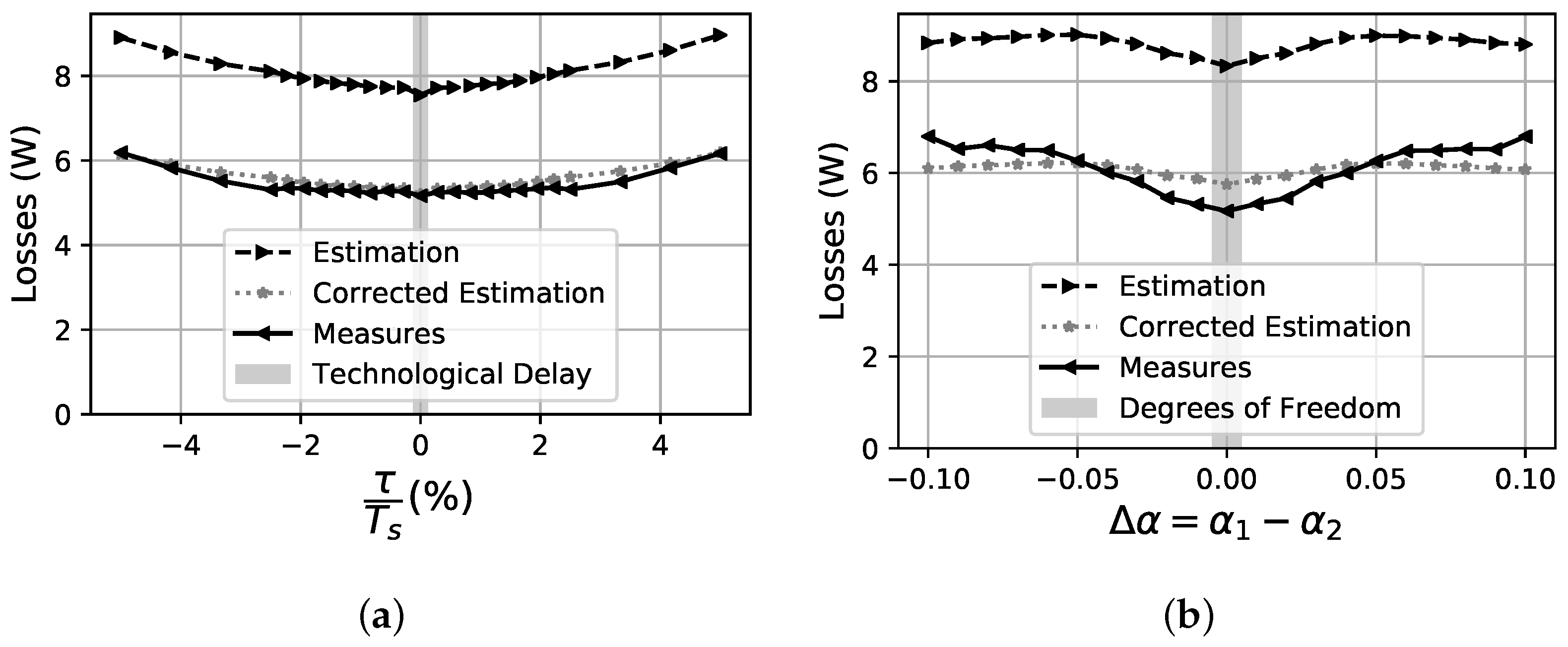
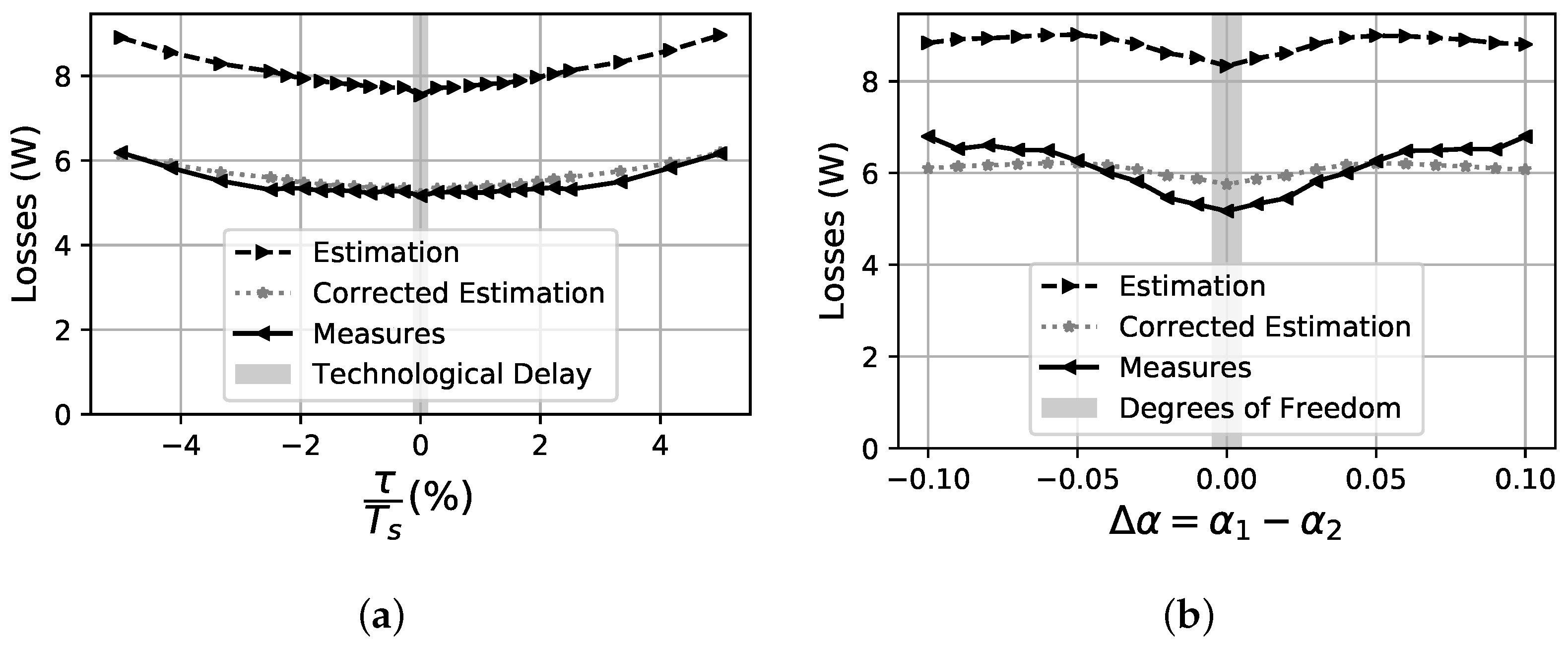
4.2. Delay Study
4.3. Duty-Cycle Discrepancies
4.4. Losses Estimation
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cissé, K.M.; Hlioui, S.; Cheng, Y.; Belhadi, M.H. Etat de l’art des topologies de machines électriques utilisées dans les véhicules électriques et hybrides. In Proceedings of the Symposium de Genie Electrique (Sge 2018), Nancy, France, 3–5 July 2018; pp. 3–5. [Google Scholar]
- Oswald, N.; Anthony, P.; McNeill, N.; Stark, B.H. An experimental investigation of the tradeoff between switching losses and EMI generation with hard-switched All-Si, Si-SiC, and All-SiC device combinations. IEEE Trans. Power Electron. 2014, 29, 2393–2407. [Google Scholar] [CrossRef]
- Han, D.; Li, S.; Lee, W.; Choi, W.; Sarlioglu, B. Trade-off between switching loss and common mode EMI generation of GaN devices-analysis and solution. In Proceedings of the Conference Proceedings—IEEE Applied Power Electronics Conference and Exposition—APEC, Tampa, FL, USA, 26–30 March 2017; pp. 843–847. [Google Scholar] [CrossRef]
- Concari, L.; Barater, D.; Toscani, A.; Concari, C.; Franceschini, G.; Buticchi, G.; Liserre, M.; Zhang, H. Assessment of efficiency and reliability of wide band-gap based H8 inverter in electric vehicle applications. Energies 2019, 12, 1922. [Google Scholar] [CrossRef]
- Zoeller, C.; Wolbank, T.M.; Vogelsberger, M.A. Inverter-fed drive stator insulation monitoring based on reflection phenomena stimulated by voltage step excitation. In Proceedings of the ECCE 2016 IEEE Energy Conversion Congress and Exposition, Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Florkowski, M.; Florkowska, B.; Zydron, P. Partial discharges in insulating systems of low voltage electric motors fed by power electronics—Twisted-pair samples evaluation. Energies 2019, 12, 768. [Google Scholar] [CrossRef]
- Erdman, J.M.; Kerkman, R.J.; Schlegel, D.W.; Skibinski, G.L. Effect of PWM Inverters on AC Motor Bearing Currents and. IEEE Trans. Ind. Appl. 1996, 32, 250–259. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Han, Y. Integrated Modular Motor Drive Design WithGaNPowerFETs. IEEE Trans. Ind. Appl. 2015, 51, 3198–3207. [Google Scholar] [CrossRef]
- Gerrits, T.; Wijnands, C.G.E.; Paulides, J.J.H.; Duarte, J.L. Electrical gearbox equivalent by means of dynamic machine operation. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Hoang, E.; Gaussens, B.; Lecrivain, M.; Gabsi, M. Proposition pour accroître la puissance convertible par un ensemble onduleur de tension—Machine synchrone à commutation de flux à double excitation dans une application motorisation de véhicule hybride ou électrique. In Proceedings of the Symposium de Genie Electrique (Sge”14), Cachan, France, 8–10 July 2014; pp. 8–10. [Google Scholar]
- Li, G.; Ojeda, J.; Hoang, E.; Gabsi, M. Double and single layers flux-switching permanent magnet motors: Fault tolerant model for critical applications. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, ICEMS 2011, Beijing, China, 20–23 August 2011. [Google Scholar] [CrossRef]
- Li, W.; Cheng, M. Reliability analysis and evaluation for flux-switching permanent magnet machine. IEEE Trans. Ind. Electron. 2019, 66, 1760–1769. [Google Scholar] [CrossRef]
- Baumgardt, A.; Bachheibl, F.; Patzak, A.; Gerling, D.; Machine, A.E. 48V Traction: Innovative Drive Topology and Battery. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016. [Google Scholar] [CrossRef]
- Hoang, E.; Labouré, E. Electric Machine Powered at Low Voltage and Associated Multicellular Traction Chain. WO2018149996, 23 August 2018. [Google Scholar]
- Boxriker, M.; Kolb, J.; Doppelbauer, M. Expanding the operating range of permanent magnet synchronous motors by using the optimum number of phases. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications, EPE 2016 ECCE Europe, Karlsruhe, Germany, 5–9 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Ojeda, J.; Bouker, H.; Vido, L.; Ahmed, H.B.; Cachan, E.N.S. Comparison of 3-phase and 5-phase high speed synchronous motor for EV/HEV applications. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016. [Google Scholar] [CrossRef]
- Wu, B.; Xu, D.; Ji, J.; Zhao, W.; Jiang, Q. Field-Oriented Control and Direct Torque Control for a Five-Phase Fault-Tolerant Flux-Switching Permanent-Magnet Motor. Chin. J. Electr. Eng. 2018, 4, 48–56. [Google Scholar] [CrossRef]
- Bojoi, R.; Rubino, S.; Tenconi, A.; Vaschetto, S. Multiphase electrical machines and drives: A viable solution for energy generation and transportation electrification. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering, EPE 2016, Iasi, Romania, 20–22 October 2016; pp. 632–639. [Google Scholar] [CrossRef]
- Gubbala, L.; Von Jouanne, A.; Enjeti, P.; Singh, C.; Toliyat, H. Voltage distribution in the windings of an AC motor subjected to high dV/dt PWM voltages. In Proceedings of the PESC Record—IEEE Annual Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995; Volume 1, pp. 579–585. [Google Scholar] [CrossRef]
- Ghassemi, M. Accelerated insulation aging due to fast, repetitive voltages: A review identifying challenges and future research needs. IEEE Trans. Dielectr. Electr. Insul. 2019, 26, 1558–1568. [Google Scholar] [CrossRef]
- Chang, L.; Jahns, T.M. Prediction and Evaluation of PWM-Induced Current Ripple in IPM Machines Incorporating Slotting, Saturation, and Cross-Coupling Effects. IEEE Trans. Ind. Appl. 2018, 54, 6015–6026. [Google Scholar] [CrossRef]
- Tamizi, K.; Béthoux, O.; Labouré, E. An easy to implement and robust design control method dedicated to multi-cell converters using inter cell transformers. Math. Comput. Simul. 2019. [Google Scholar] [CrossRef]
- Gustavsen, B. Wide band modeling of power transformers. In Proceedings of the 2004 IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004; Volume 2, p. 1791. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cizeron, A.; Ojeda, J.; Labouré, E.; Béthoux, O. Prediction of PWM-Induced Current Ripple in Subdivided Stator Windings Using Admittance Analysis. Energies 2019, 12, 4418. https://doi.org/10.3390/en12234418
Cizeron A, Ojeda J, Labouré E, Béthoux O. Prediction of PWM-Induced Current Ripple in Subdivided Stator Windings Using Admittance Analysis. Energies. 2019; 12(23):4418. https://doi.org/10.3390/en12234418
Chicago/Turabian StyleCizeron, Antoine, Javier Ojeda, Eric Labouré, and Olivier Béthoux. 2019. "Prediction of PWM-Induced Current Ripple in Subdivided Stator Windings Using Admittance Analysis" Energies 12, no. 23: 4418. https://doi.org/10.3390/en12234418
APA StyleCizeron, A., Ojeda, J., Labouré, E., & Béthoux, O. (2019). Prediction of PWM-Induced Current Ripple in Subdivided Stator Windings Using Admittance Analysis. Energies, 12(23), 4418. https://doi.org/10.3390/en12234418