Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine Using Coupled Finite–Infinite Element Method


Abstract
1. Introduction
2. Methodologies
2.1. Dynamic Impedance of the Wide-Shallow Bucket Foundations (WSBF)
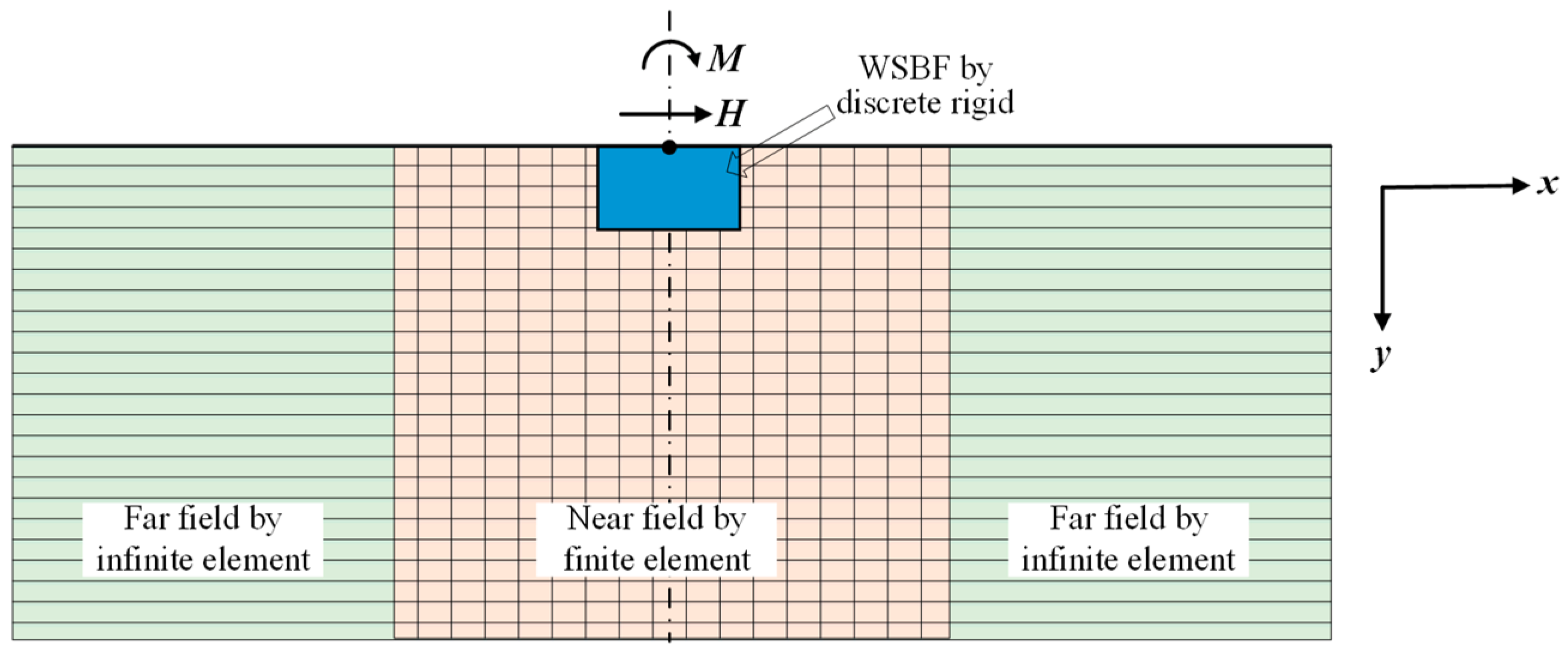
2.2. Coupling Finite-Infinite Element (FE-IFE) Technique
2.3. Steady-State Dynamic Analysis
3. Numerical Examples
3.1. Numerical Model
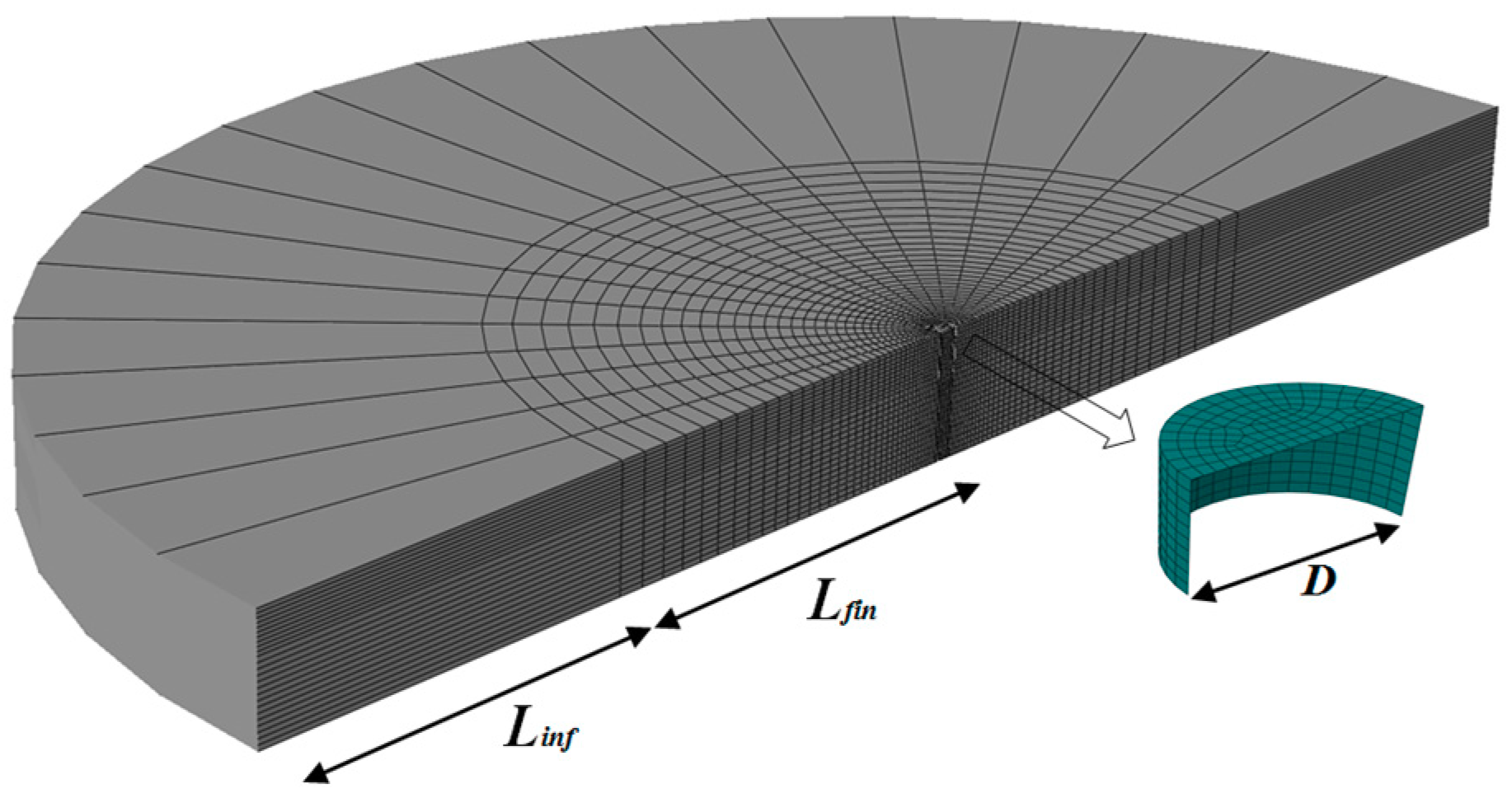
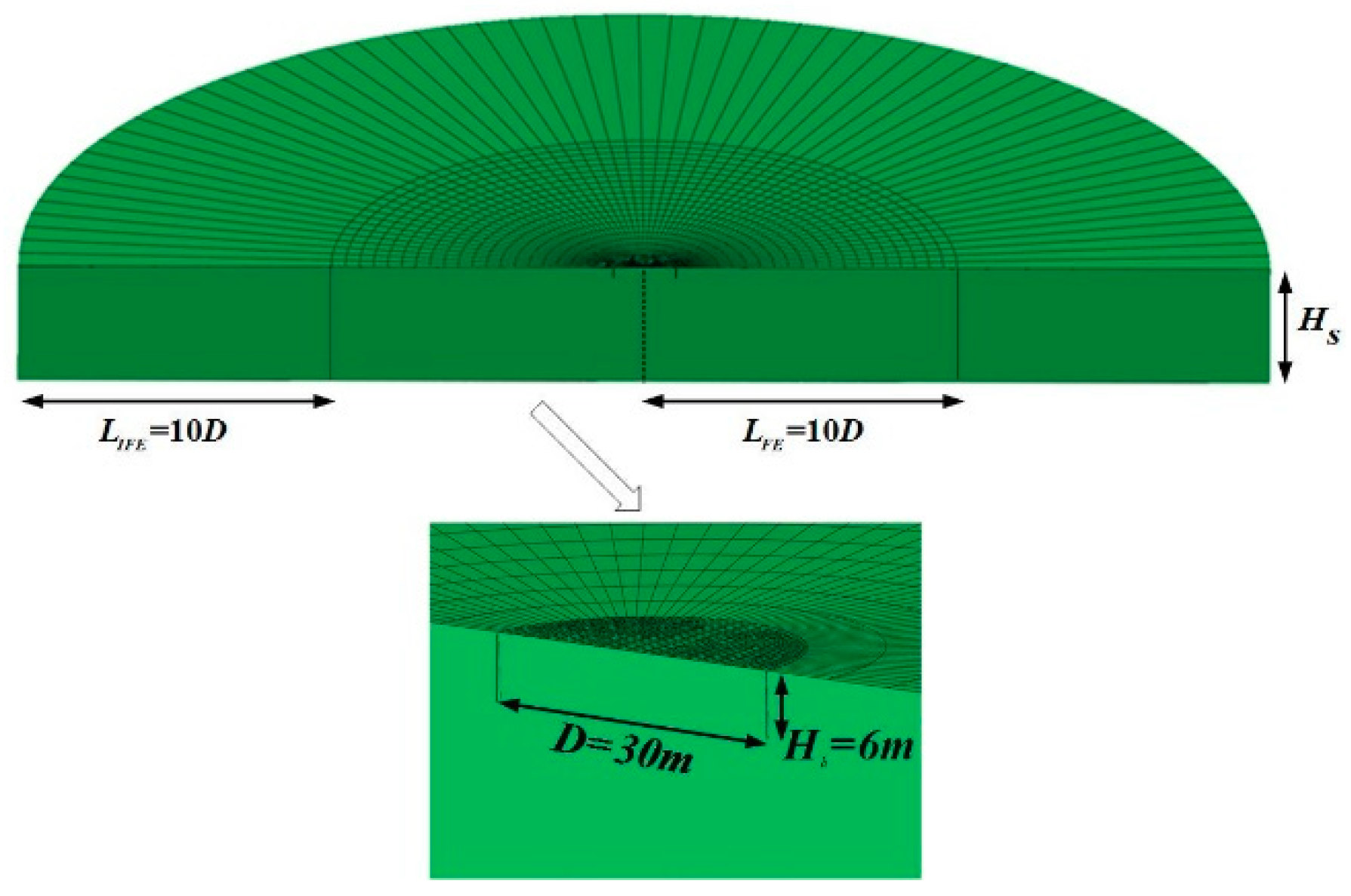
3.2. FE-IFE Model
4. Parametric Study
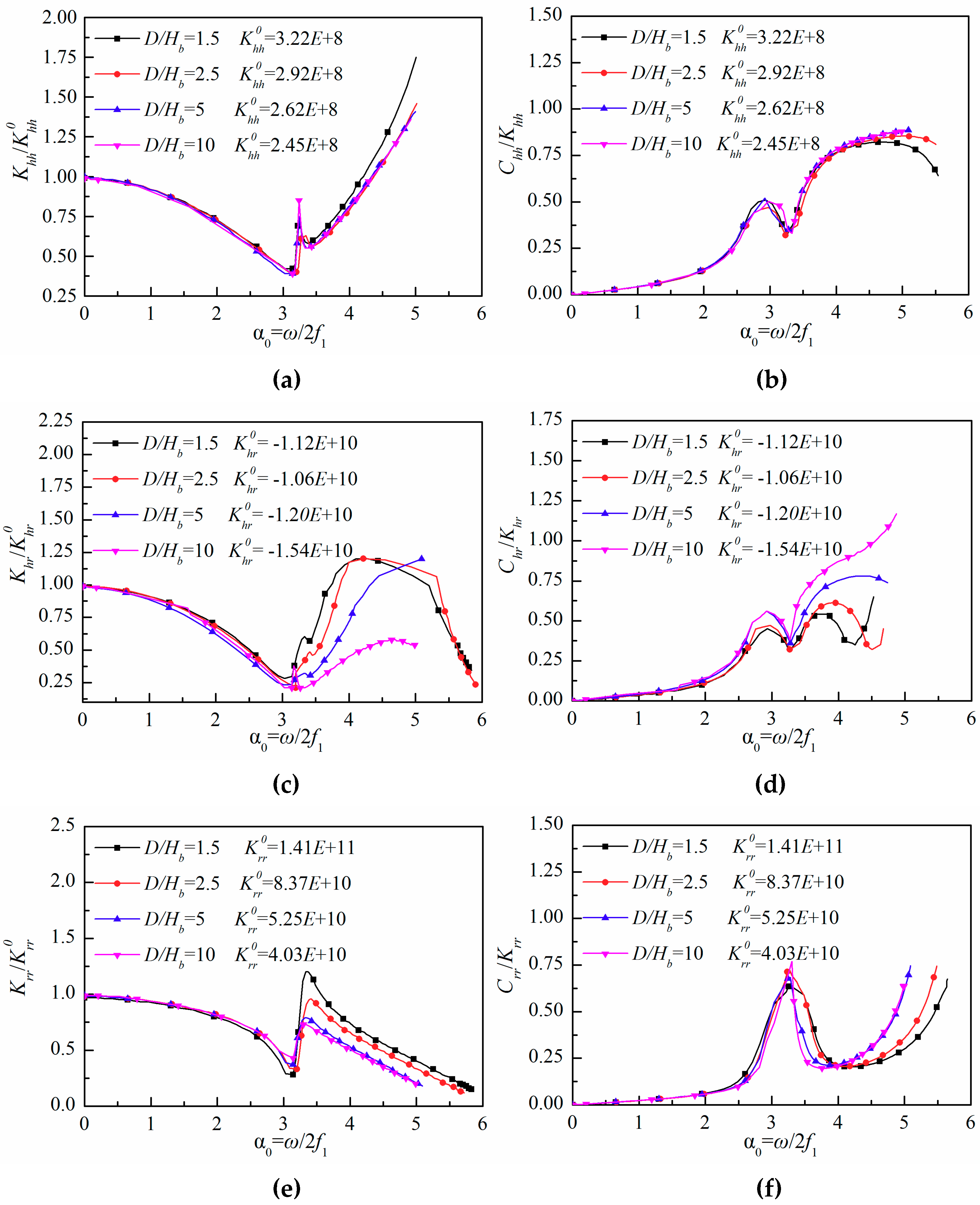
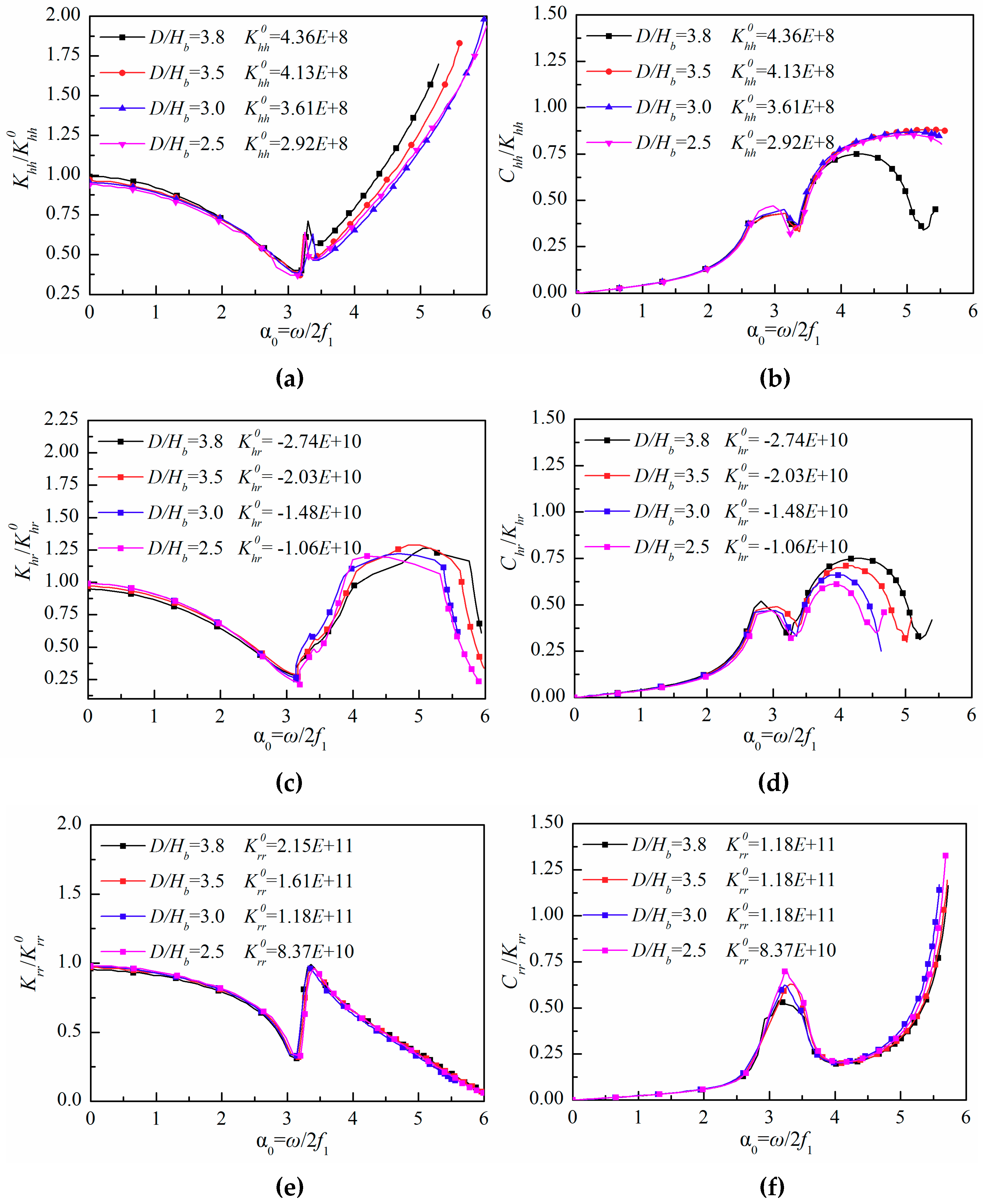
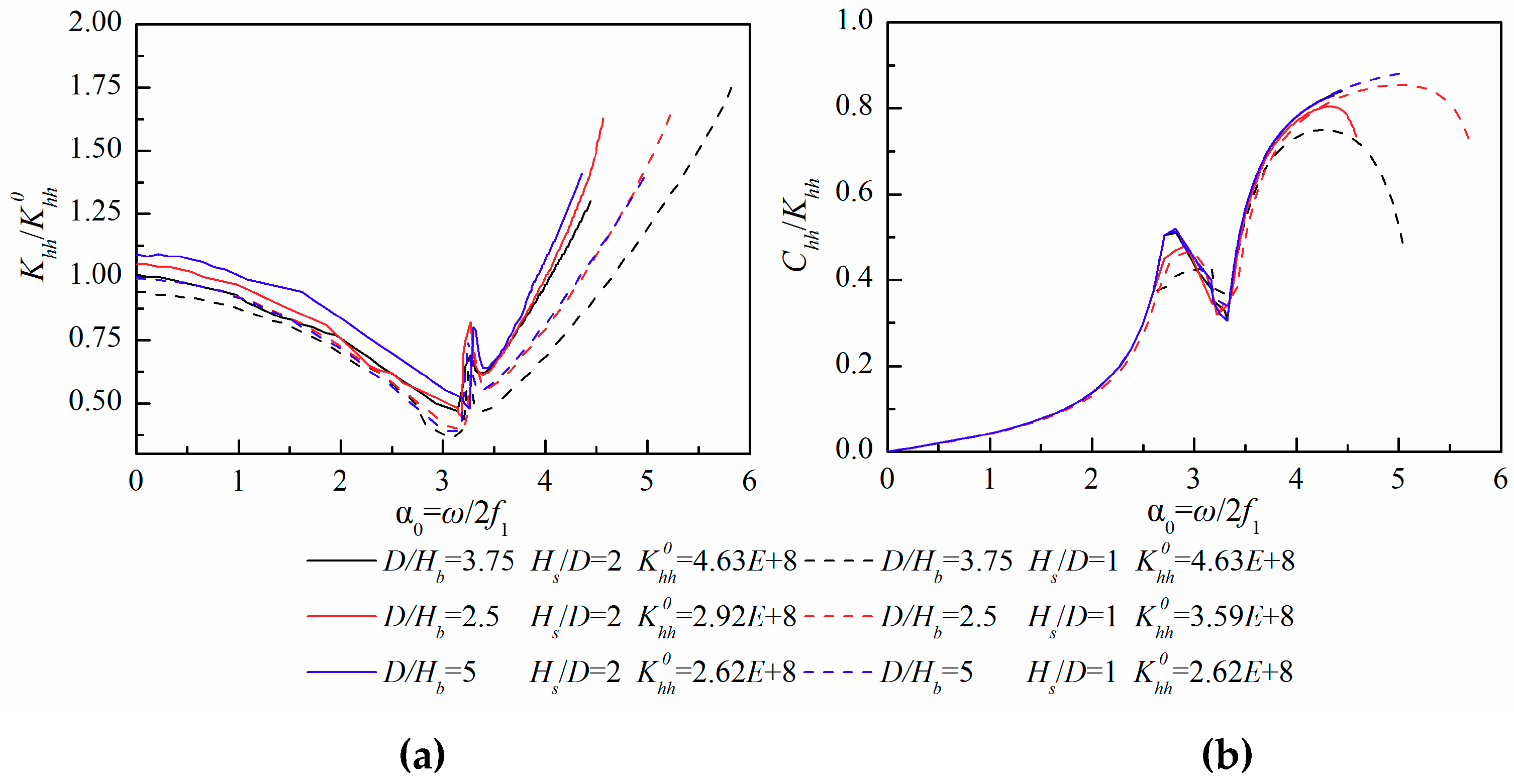
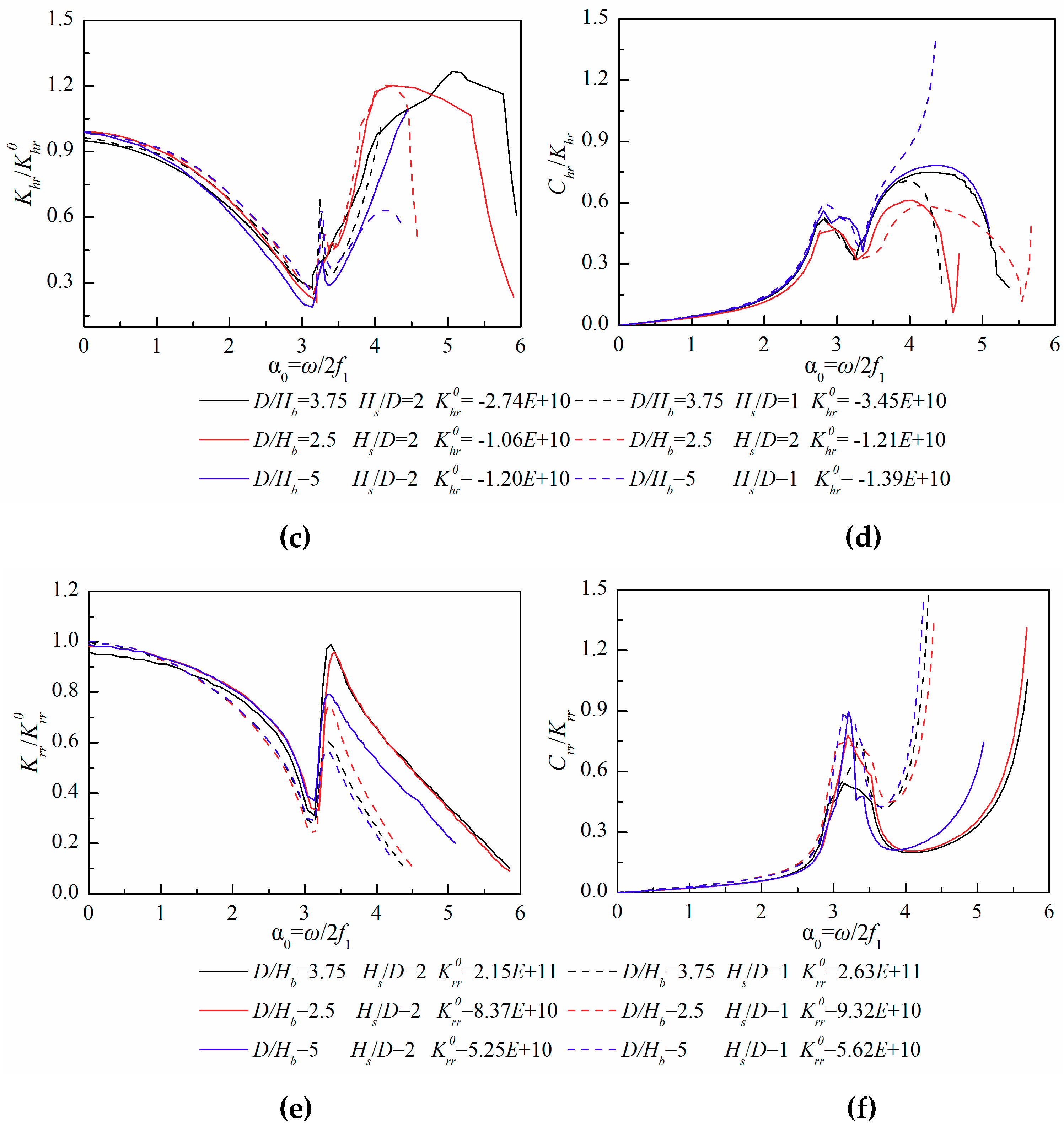
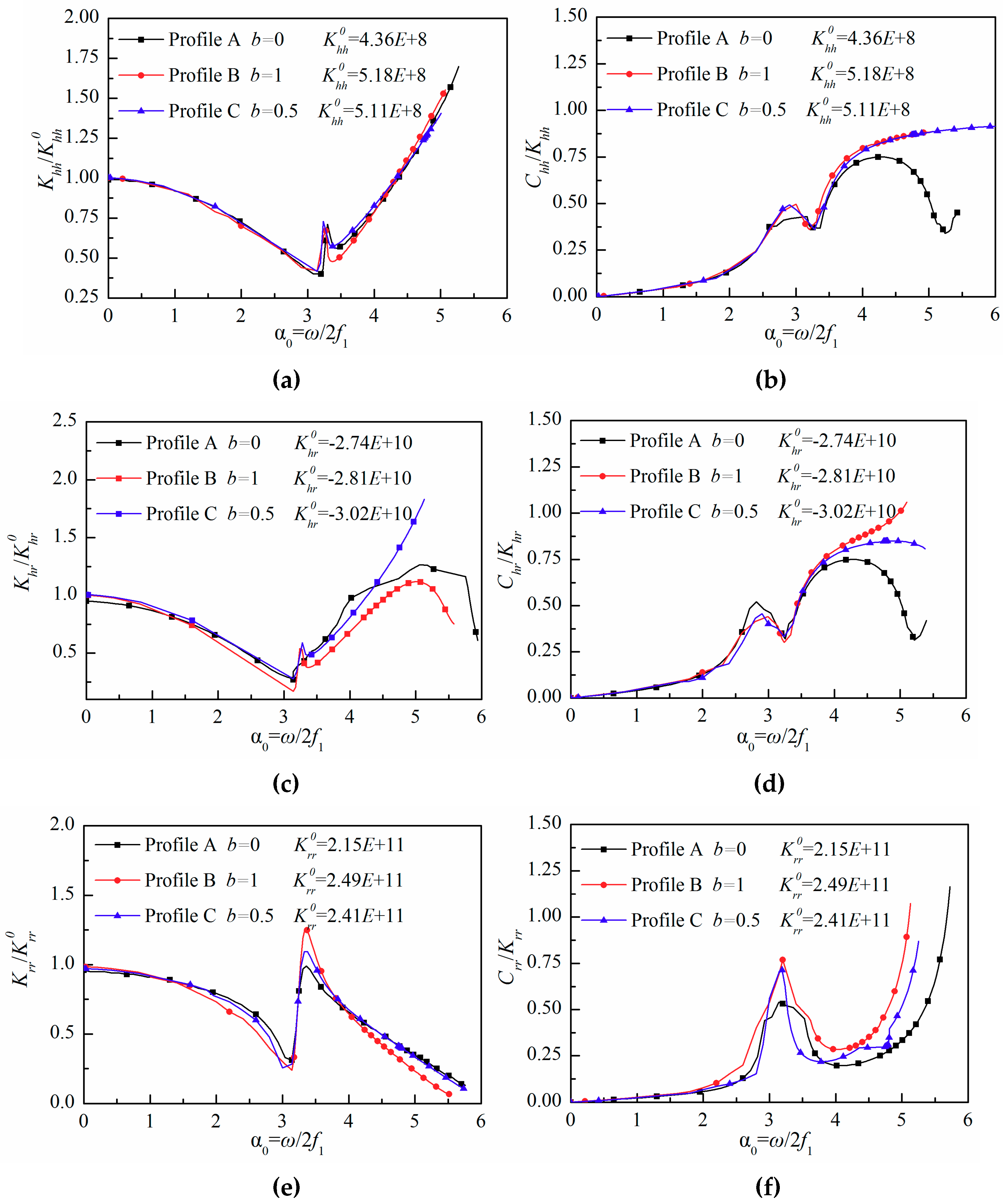
4.1. Influence of Slenderness Ratio
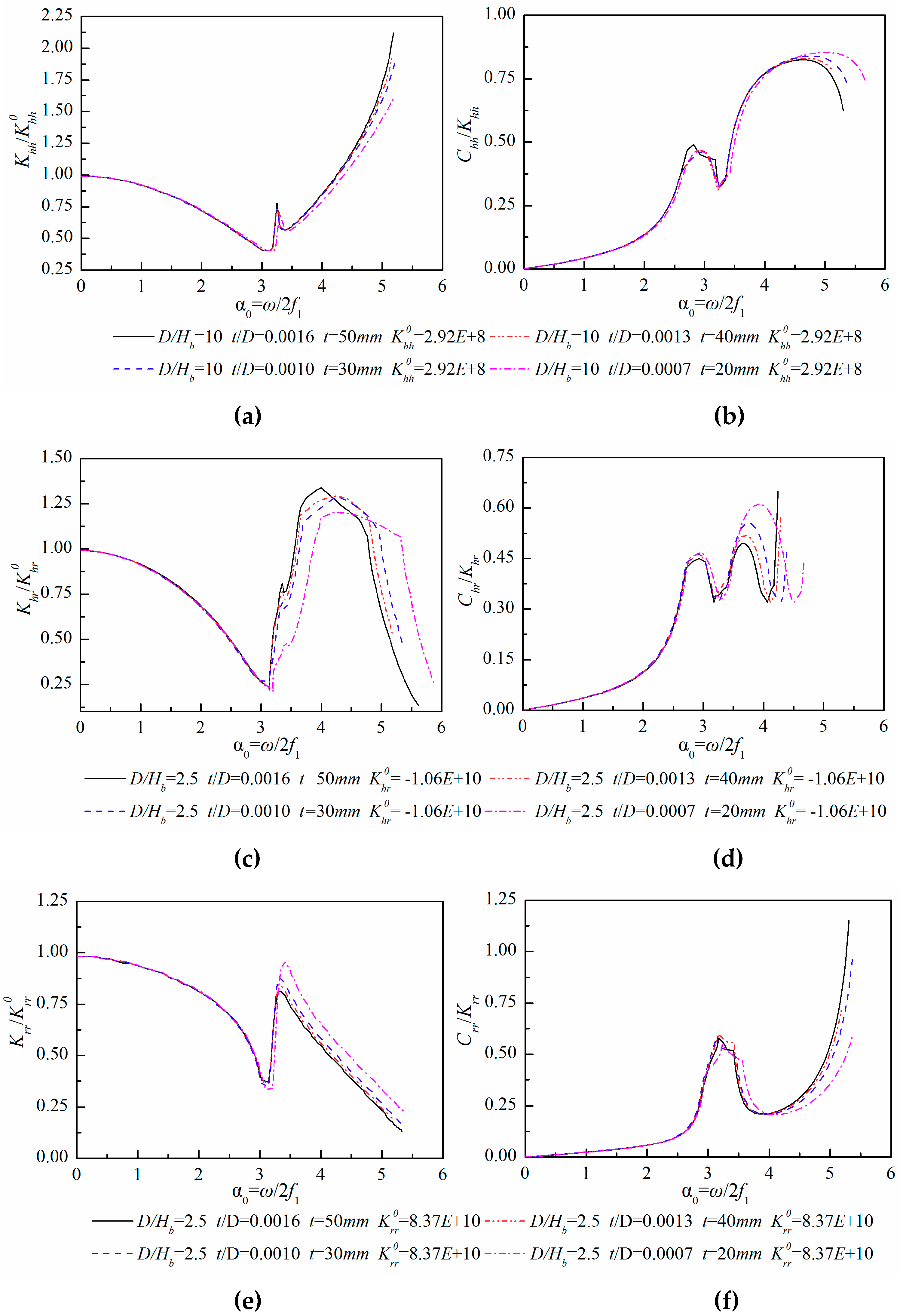
4.2. Influence of the Skirt Thickness
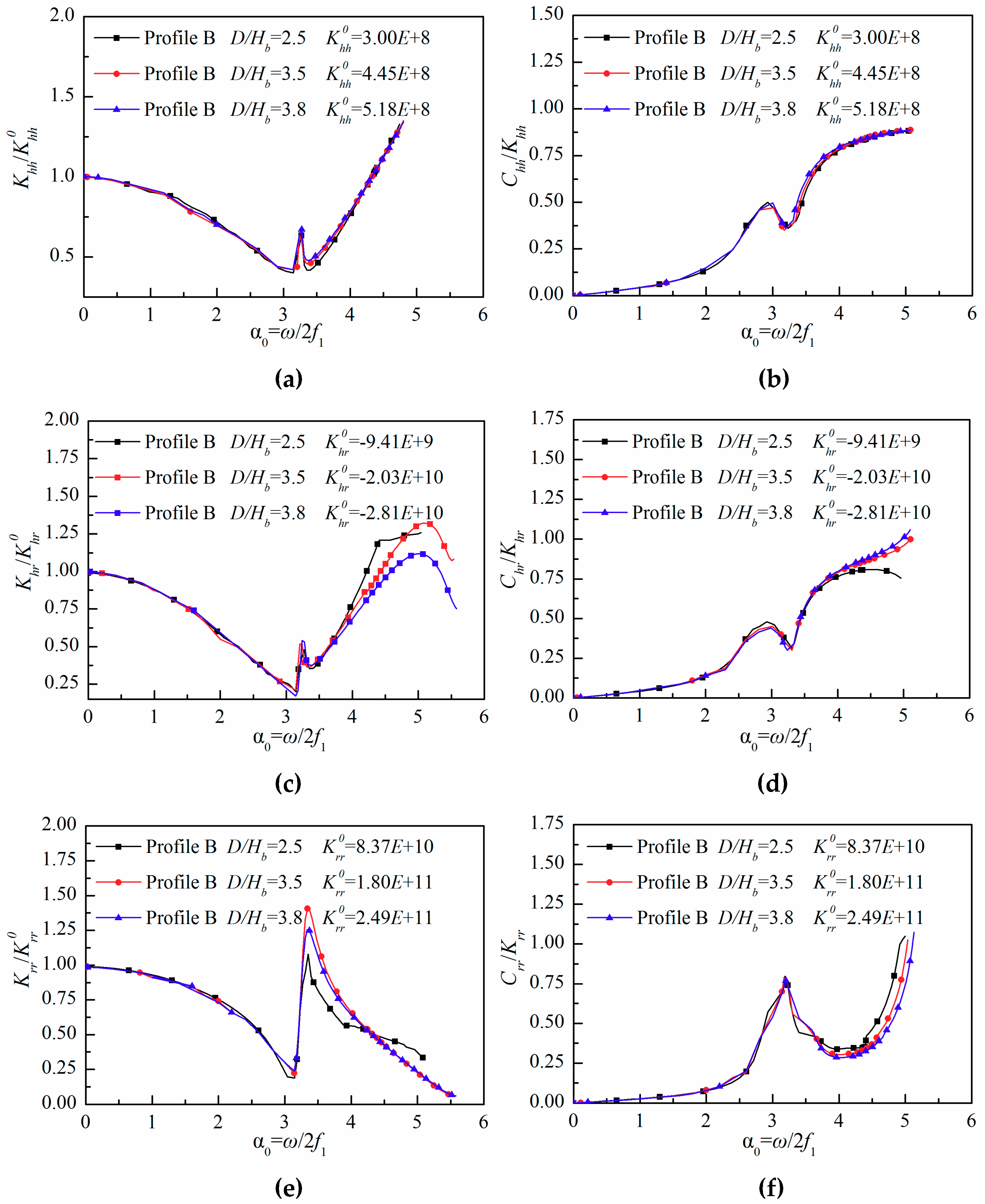
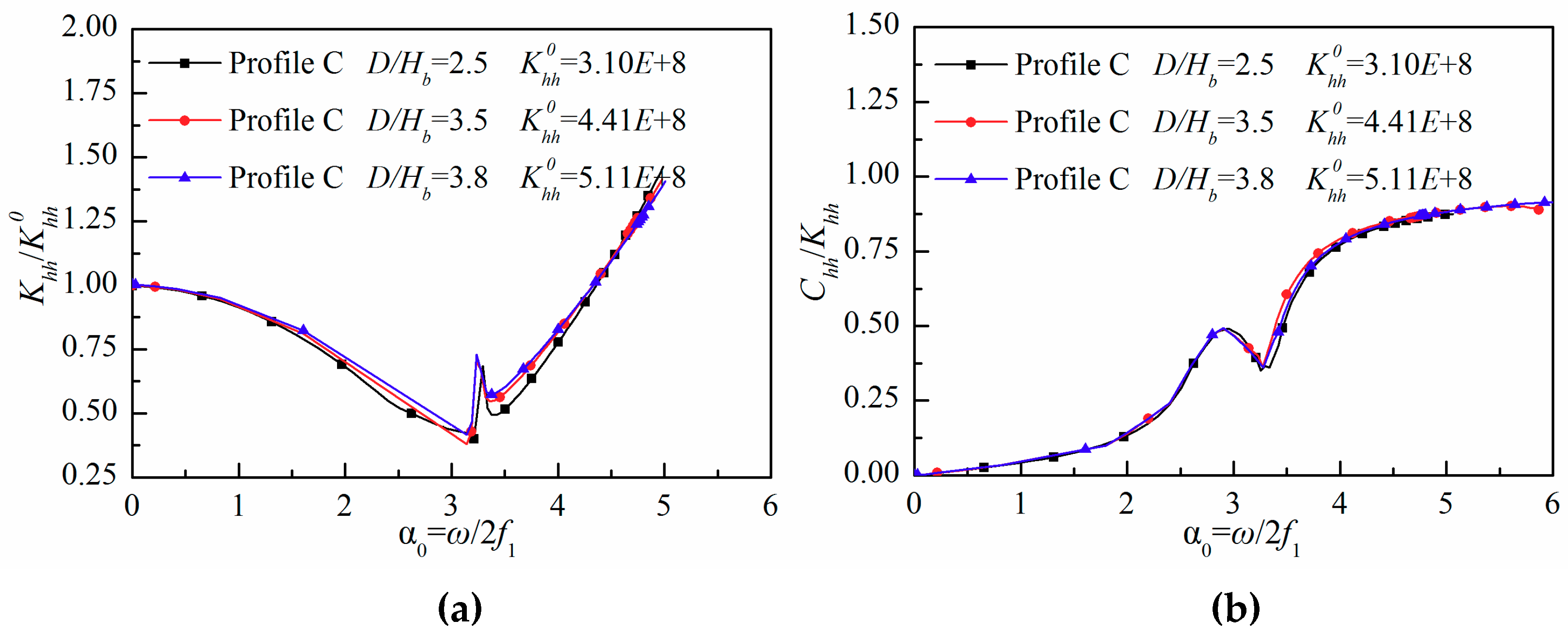
4.3. Influence of the Soil Thickness
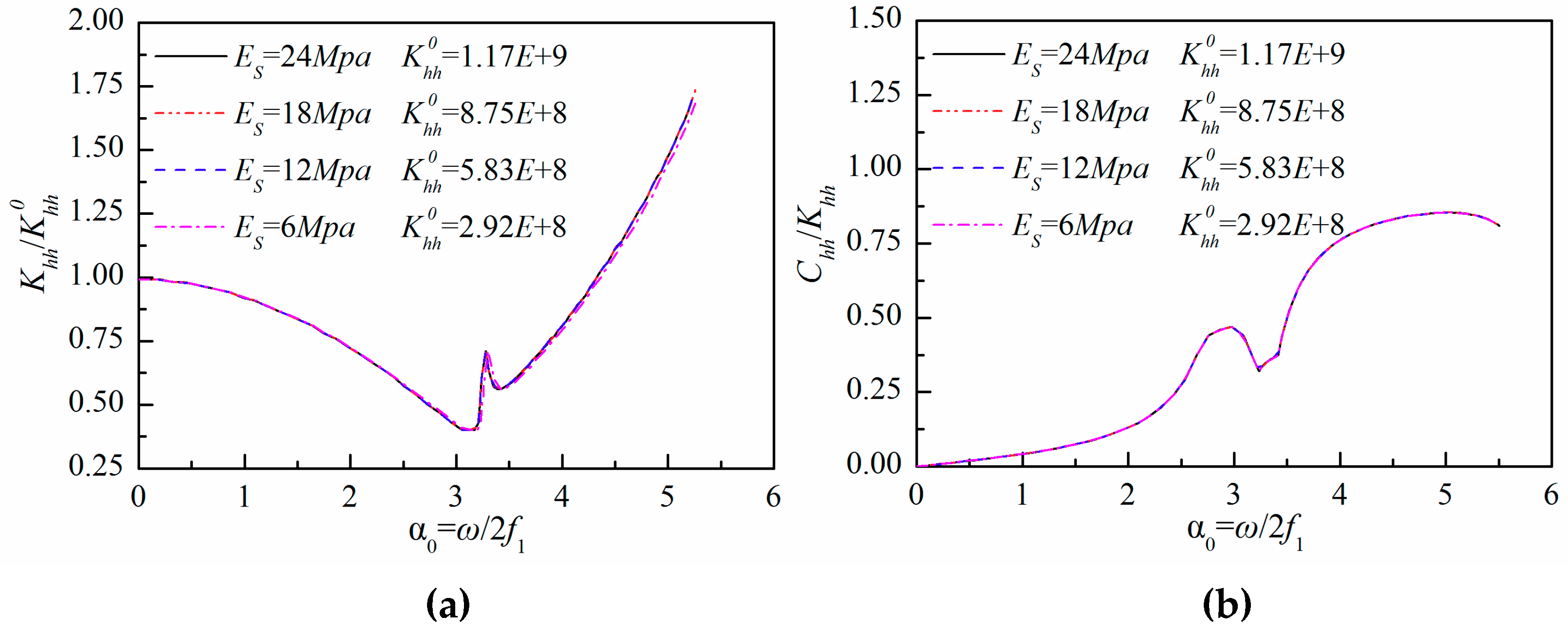
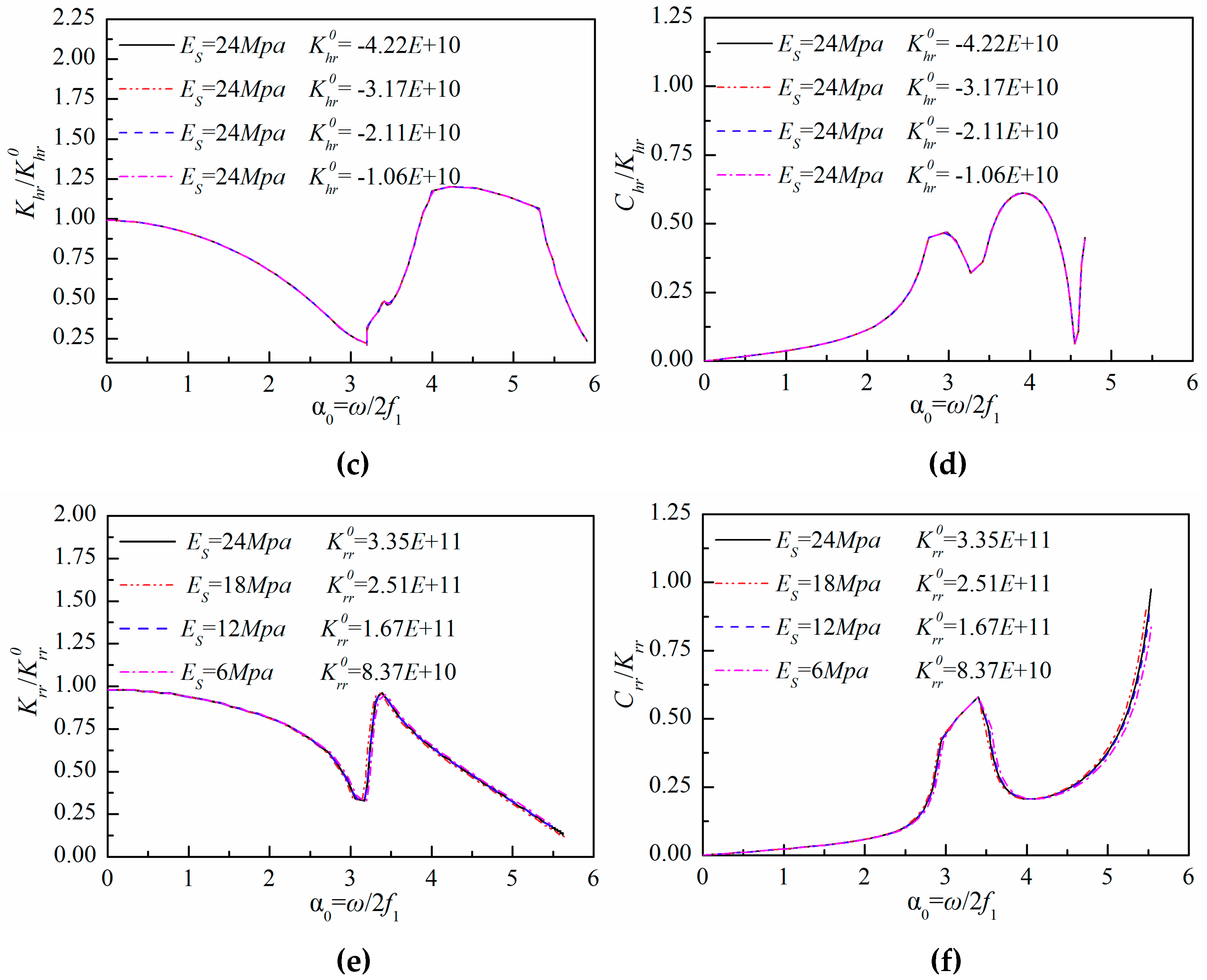
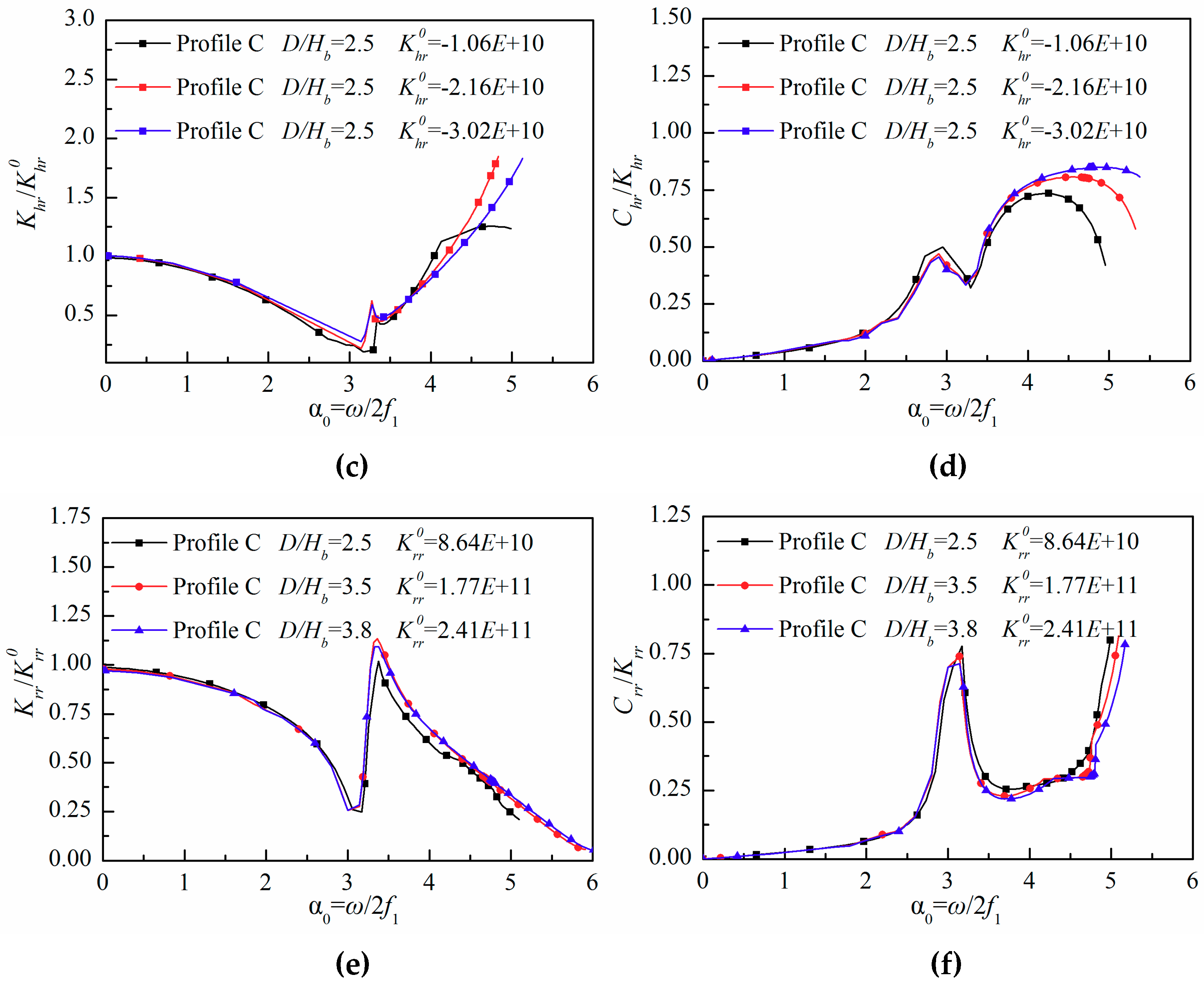
4.4. Influence of the Homogeneous Soil Stiffness
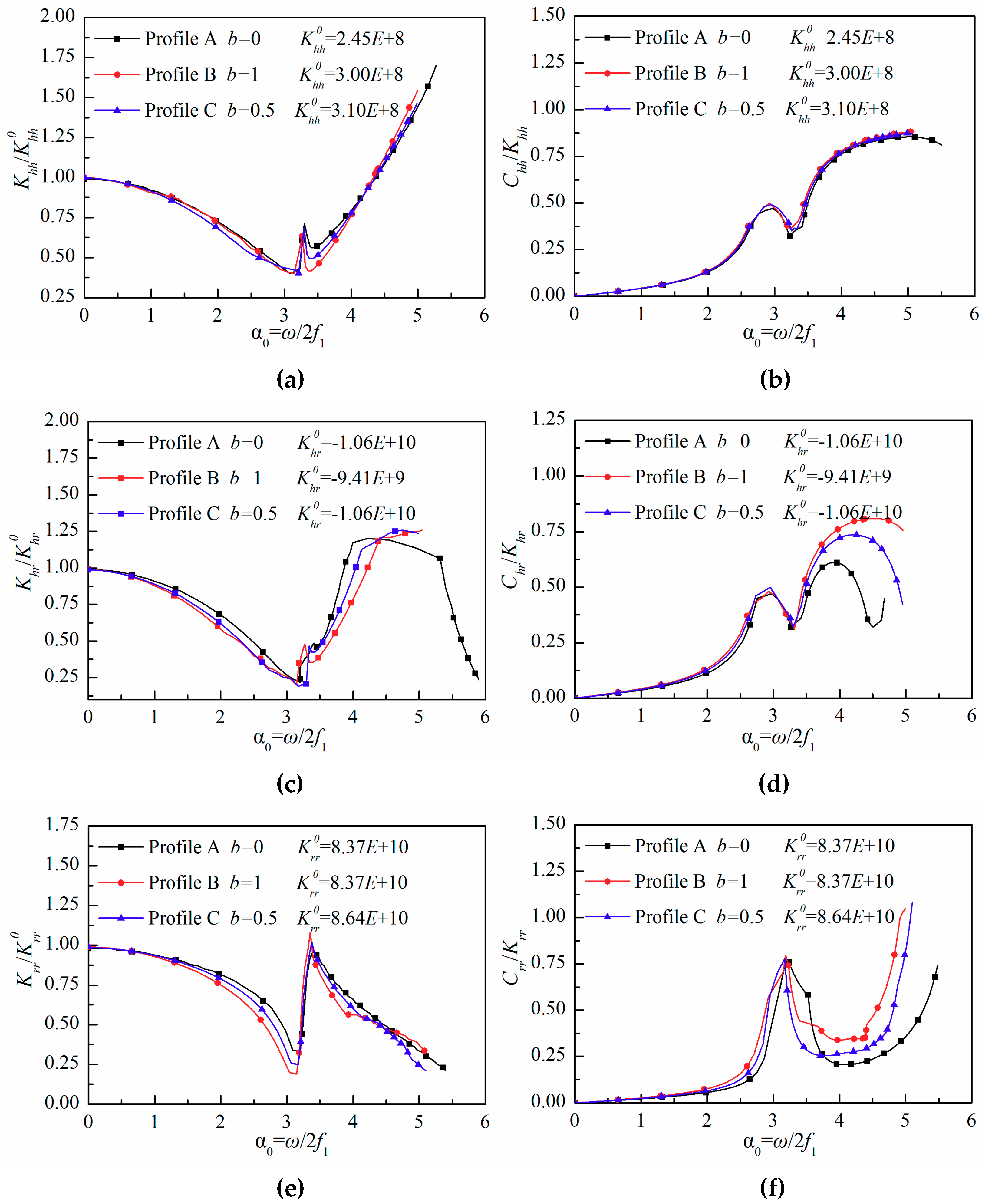
4.5. Influence of Multi-Layer Soil Stiffness
4.6. Multivariate Impact Analysis
5. Engineering Verification
6. Conclusions
- (1)
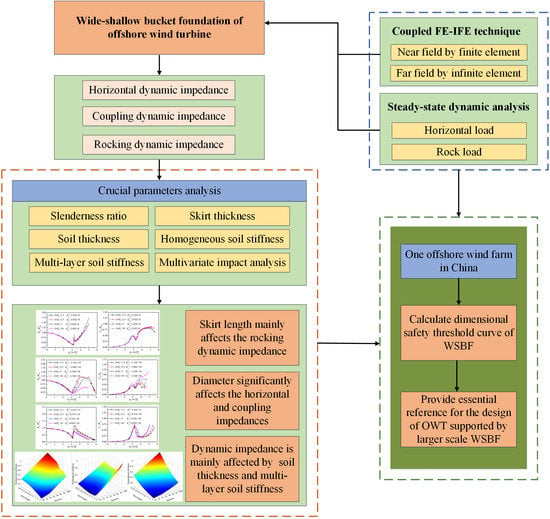
- Firstly, the slenderness ratio significantly affects the dynamic impedances of WSBF. After the first eigenfrequency, the coupling stiffness increases sharply and the rocking stiffness decreases smoothly by increasing skirt length, as more rotation and less lateral contribute to the dynamic response. On the contrary, the horizontal stiffness coefficient grows remarkedly against diameter, because the horizontal vibration is mainly transmitted to the surrounding soil at relatively shallow area, enhancing the horizontal stiffness of the WSBF. As for the skirt thickness, when it is larger than 30 mm, its impact on the dynamic impedance of WSBF can be negligible.
- (2)
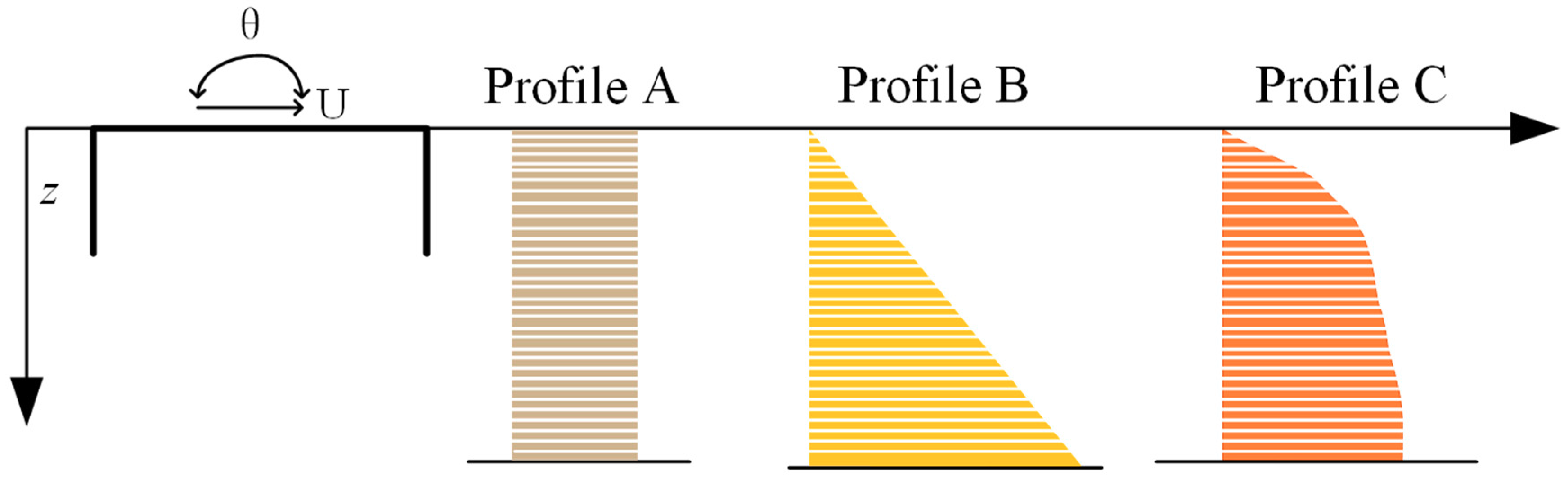
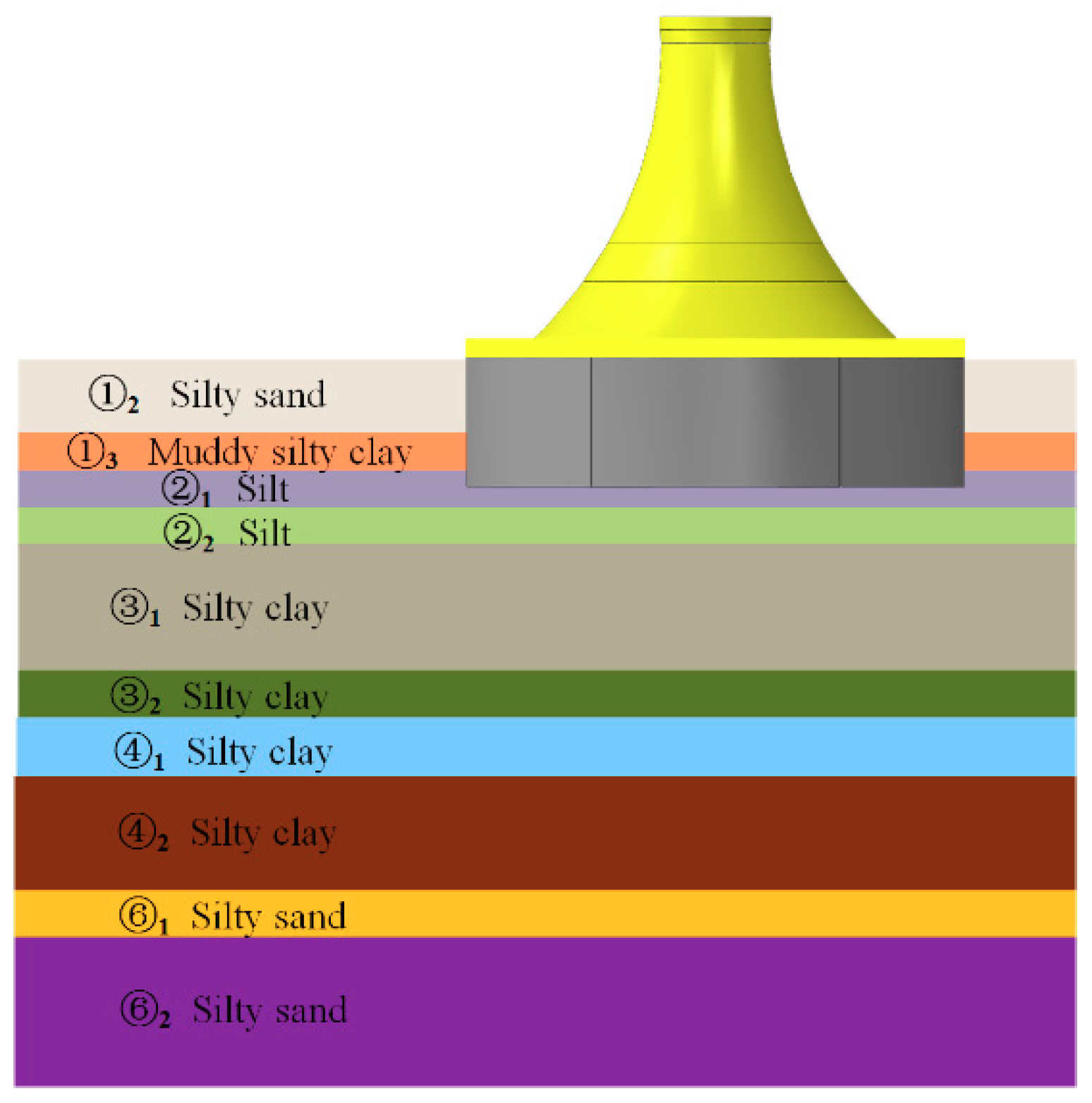
- Secondly, within the frequency range investigated, the dynamic impedances of the foundation are marginally affected by the relative stiffness of homogeneous soil, but more sensitive to the relative soil thickness. This can be explained by the fact that the larger the soil thickness is, the longer the vibration response transmits, and therefore the decay of the dynamic impedance is less noticeable. For the multi-layer soil profile, the coupling and rocking coefficients are more sensitive to the soil stiffness variation with depth because the dynamic impedances depend on the soil stiffness where the foundation is embedded.
- (3)
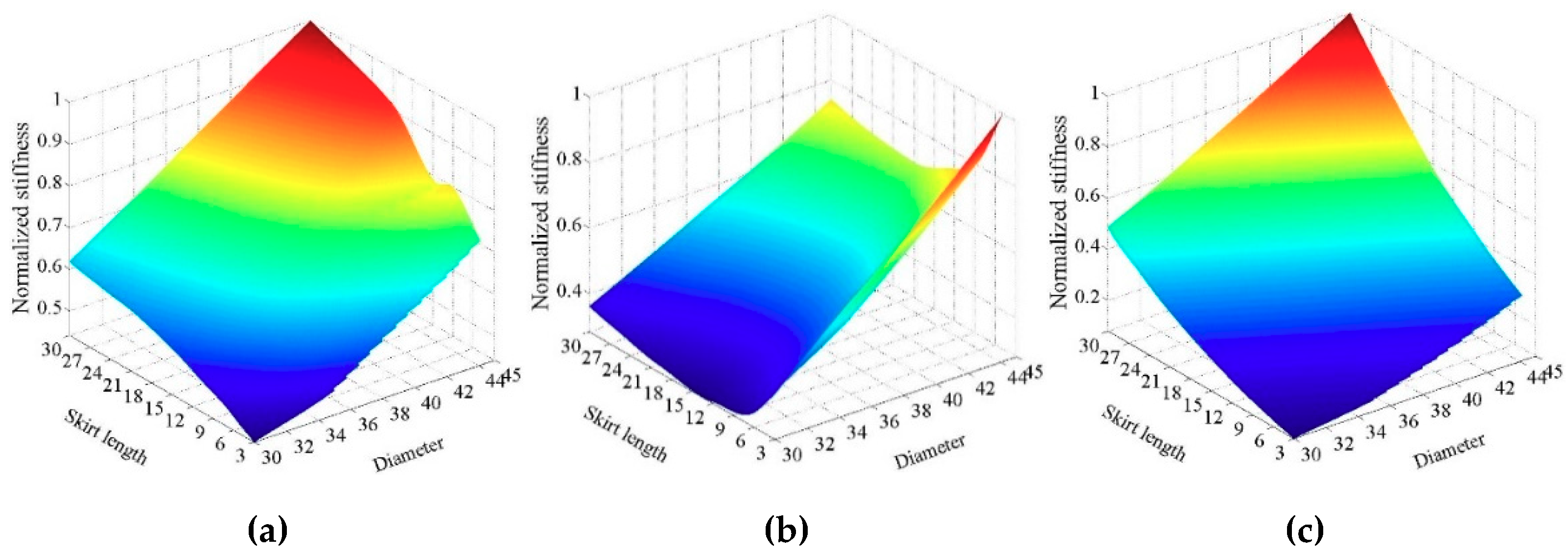
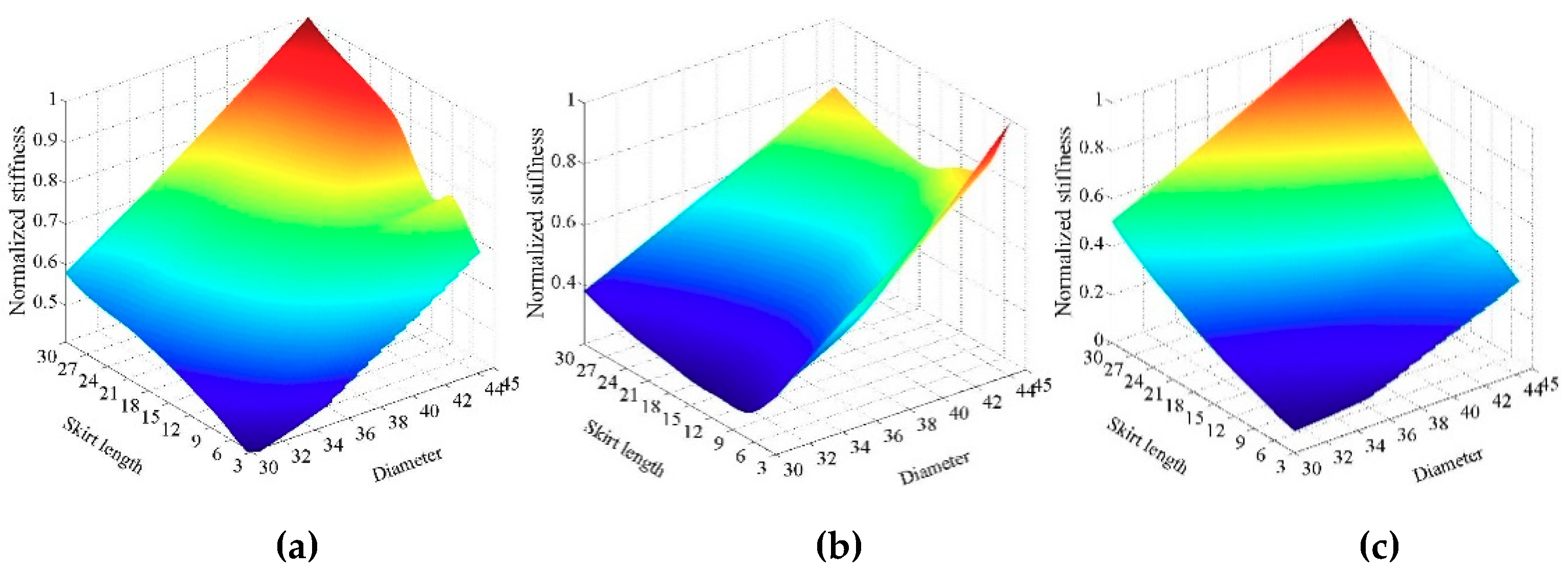
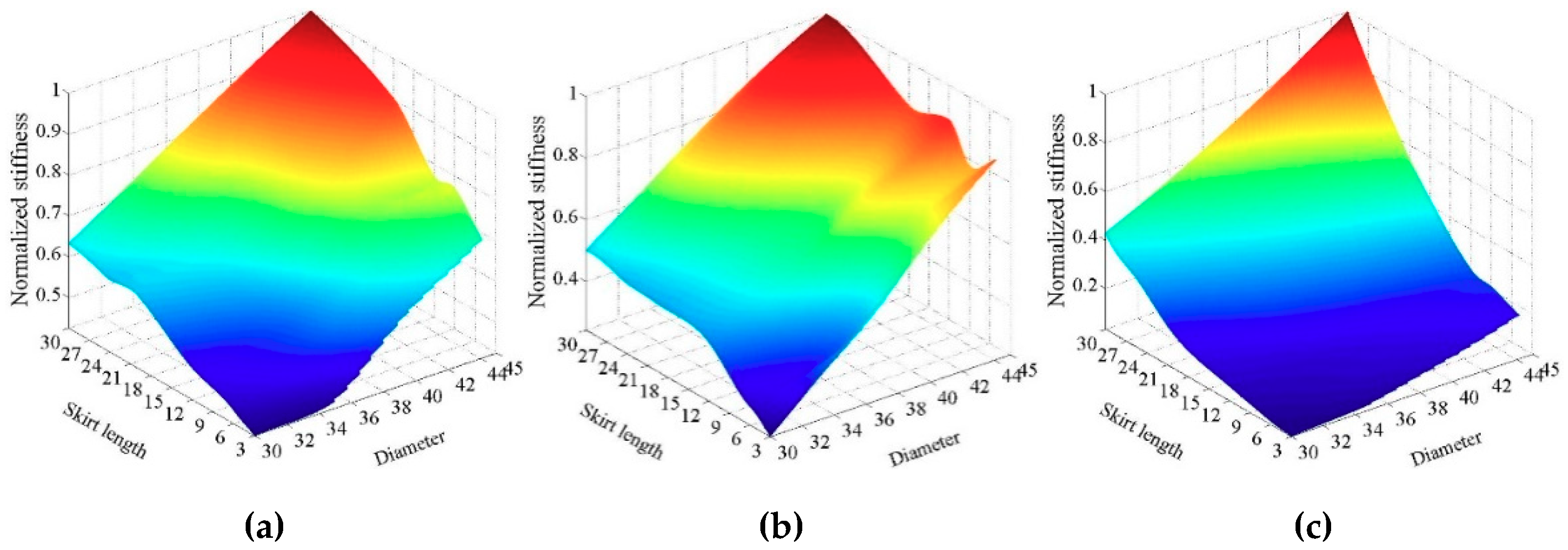
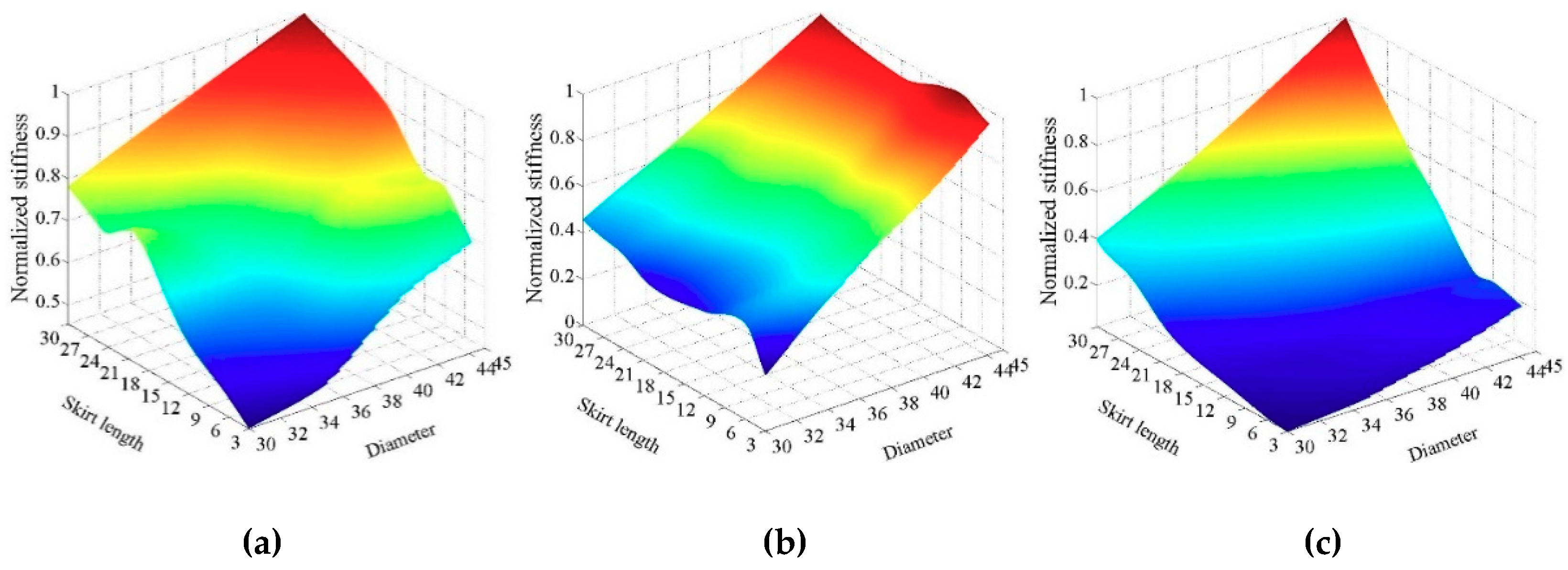
- Additionally, both the diameter and skirt length are found to be substantial parameters to the horizontal stiffness and coupling stiffness, while the rocking stiffness is mainly determined by the skirt length in the frequency range considered. The horizontal stiffness under the dimensionless frequency of 4 and 5 is governed by the diameter when it is greater than 36 m. The coupling stiffness under the dimensionless frequency of 0 and 2 decreases firstly and then increases with the skirt length increasing.
- (4)
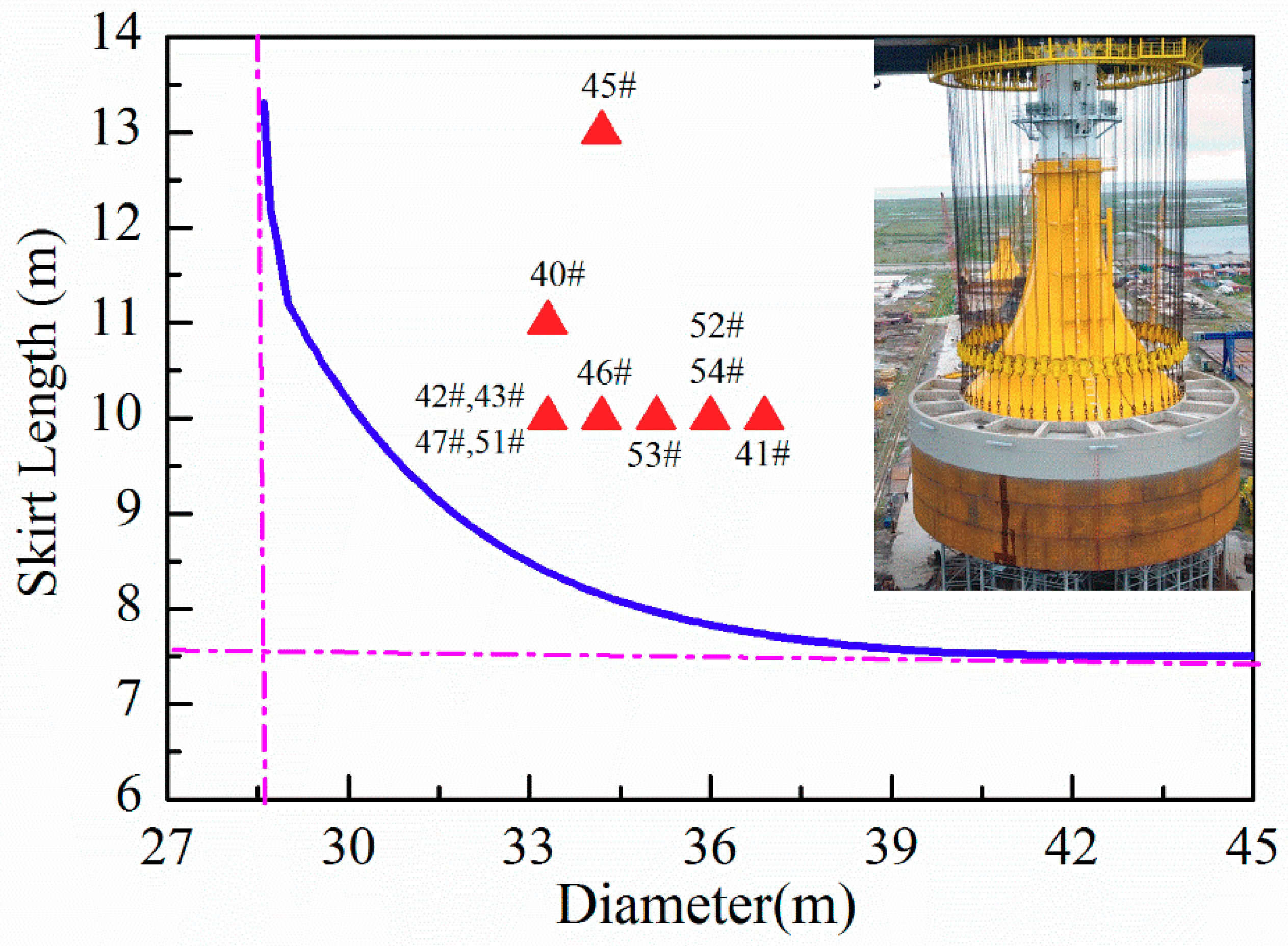
- Lastly, taking one OWF in China as an example, the dimensional safety threshold curve is calculated based on the maximum allowable tilt of WSBF and corresponding design load. According to proposed curve, the minimum values of the diameter and skirt length are determined as 29 m and 7.5 m, respectively. The calculated dimensional safety threshold curve proves to be reasonable and correct because the actual design geometries of WSBF all locate above the threshold values.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, X.Y.; Zeng, X.W.; Li, J.L.; Yang, X.; Wang, H.J. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Lian, J.J.; Cai, O.; Dong, X.F.; Jiang, Q.; Zhao, Y. Health Monitoring and Safety Evaluation of the Offshore Wind Turbine Structure: A Review and Discussion of Future Development. Sustainability 2019, 11, 494. [Google Scholar] [CrossRef]
- Swagata, B.; Sumanta, H. Design of monopile supported offshore wind turbine in clay considering dynamic soil–structure-interaction. Soil Dyn. Earthq. Eng. 2015, 73, 103–117. [Google Scholar]
- Arany, L.; Bhattacharya, S.; Macdonald, J.; Hogan, S.J. Design of monopiles for offshore wind turbines in 10 steps. Soil Dyn. Earthq. Eng. 2017, 92, 126–152. [Google Scholar] [CrossRef]
- Bisoi, S.; Haldar, S. Dynamic analysis of offshore wind turbine in clay considering soil–monopile–tower interaction. Soil Dyn. Earthq. Eng. 2014, 63, 19–35. [Google Scholar] [CrossRef]
- Carswell, W.; Arwade, S.R.; DeGroot, D.J.; Lackner, M.A. Soil-structure reliability of offshore wind turbine monopile foundations. Wind Energy 2015, 18, 483–498. [Google Scholar] [CrossRef]
- Santangelo, F.; Failla, G.; Santini, A.; Arena, F. Time-domain uncoupled analyses for seismic assessment of land-based wind turbines. Eng. Struct. 2016, 123, 275–299. [Google Scholar] [CrossRef]
- Haciefendioglu, K. Stochastic seismic response analysis of offshore wind turbine including fluid-structure-soil-interaction. Struct. Des. Tall Spec. Build. 2012, 21, 867–878. [Google Scholar] [CrossRef]
- Alati, N.; Failla, G.; Arena, F. Seismic analysis of offshore wind turbines on bottom-fixed support structures. Philos. Trans. R. Soc. A 2015, 373, 20140086. [Google Scholar] [CrossRef]
- Jalbi, S.; Nikitas, G.; Bhattacharya, S.; Alexander, N. Dynamic design considerations for offshore wind turbine jackets supported on multiple foundations. Mar. Struct. 2019, 67, 102631. [Google Scholar] [CrossRef]
- Yang, J.; He, E.M.; Hu, Y.Q. Dynamic modeling and vibration suppression for an offshore wind turbine with a tuned mass damper in floating platform. Appl. Ocean Res. 2019, 83, 21–29. [Google Scholar] [CrossRef]
- Lian, J.J.; Chen, F.; Wang, H.J. Laboratory tests on soil-skirt interaction and penetration resistance of suction caissons during installation in sand. Ocean Eng. 2014, 84, 1–13. [Google Scholar] [CrossRef]
- Zhang, P.Y.; Ding, H.Y.; Le, C.H. Seismic response of large-scale prestressed concrete bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2014, 6, 013127. [Google Scholar] [CrossRef]
- Dong, X.; Lian, J.; Wang, H.; Yu, T.; Zhao, Y. Structural vibration monitoring and operational modal analysis of offshore wind turbine structure. Ocean Eng. 2018, 150, 280–297. [Google Scholar] [CrossRef]
- Liu, M.; Lian, J.J.; Yang, M. Experimental and numerical studies on lateral bearing capacity of bucket foundation in saturated sand. Ocean Eng. 2017, 144, 14–20. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, P.; Ding, H.; Liu, R. Experimental study of the accumulative deformation effect on wide-shallow composite bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2017, 9, 063306. [Google Scholar] [CrossRef]
- Ibsen, L.B. Implementation of a new foundations concept for offshore wind farms. In Proceedings of the 15th Nordic Geotechnical Meeting, Sandefjord, Norway, 3–6 Septemner 2008; pp. 19–33. [Google Scholar]
- Dong, X.; Lian, J.; Yang, M.; Wang, H. Operational modal identification of offshore wind turbine structure based on modified stochastic subspace identification method considering harmonic interference. J. Renew. Sustain. Energy 2014, 6, 033128. [Google Scholar] [CrossRef]
- Lian, J.J.; Jiang, J.N.; Dong, X.F.; Wang, H.J.; Zhou, H.; Wang, P.W. Coupled Motion Characteristics of Offshore Wind Turbines during the Integrated Transportation Process. Energies 2019, 12, 2023. [Google Scholar] [CrossRef]
- Wolf, J.P.; Song, C. Some cornerstones of dynamic soil–structure interaction. Eng. Struct. 2002, 24, 13–28. [Google Scholar] [CrossRef]
- Novak, M.; Nogamit, T. Soil-pile interaction in horizontal vibration. Earthq. Eng. Struct. Dyn. 1977, 5, 263–281. [Google Scholar] [CrossRef]
- Torabi, H.; Rayhani, M.T. Equivalent-linear pile head impedance functions using a hybrid method. Earthq. Eng. Struct. Dyn. 2017, 101, 137–152. [Google Scholar] [CrossRef]
- Harte, M.; Basu, B.; Nielsen, S.R.K. Dynamic analysis of wind turbines including soil-structure interaction. Eng. Struct. 2012, 45, 509–518. [Google Scholar] [CrossRef]
- Latini, C.; Zania, V.; Johannesson, B. Dynamic stiffness and damping of foundation for jacket structures. In Proceedings of the 6th International Conference on Earthquake Geotechnical Engineering, Christchurch, New Zealand, 1–4 November 2015. [Google Scholar]
- Latini, C.; Zania, V.; Cisternino, M. Dynamic stiffness of horizontally vibrating suction caissons. In Proceedings of the 17th Nordic Geotechnical Meeting, Reykjavik, Icelan, 25–28 May 2016; pp. 973–982. [Google Scholar]
- Latini, C.; Zania, V. Dynamic lateral response of suction caissons. Soil Dyn. Earthq. Eng. 2017, 100, 59–71. [Google Scholar] [CrossRef]
- Gerolymos, N.; Gazetas, G. Static and dynamic response of massive caisson foundations with soil and interface nonlinearities-validation and results. Soil Dyn. Earthq. Eng. 2006, 26, 377–394. [Google Scholar] [CrossRef]
- Gerolymos, N.; Gazetas, G. Winkler model for lateral response of rigid caisson foundations in linear soil. Soil Dyn. Earthq. Eng. 2006, 26, 347–361. [Google Scholar] [CrossRef]
- Gerolymos, N.; Gazetas, G. Development of Winkler model for static and dynamic response of caisson foundations with soil and interface nonlinearities. Soil Dyn. Earthq. Eng. 2006, 26, 363–376. [Google Scholar] [CrossRef]
- Damgaard, M.; Andersen, L.V.; Ibsen, L.B. Assessment of dynamic substructuring of a wind turbine foundation applicable for aeroelastic simulations. Wind Energy 2015, 18, 1387–1401. [Google Scholar] [CrossRef]
- Damgaard, M.; Andersen, L.V.; Ibsen, L.B. Dynamic response sensitivity of an offshore wind turbine for varying subsoil conditions. Ocean Eng. 2015, 101, 227–234. [Google Scholar] [CrossRef]
- Andersen, L.; Ibse, L.B.; Liingaard, M.A. Impedance of Bucket Foundations-Torsional, Horizontal and Rocking Motion. In Proceedings of the Sixth International Conference on Engineering Computational Technology, Stirlingshire, UK, 2–5 September 2008; pp. 2–5. [Google Scholar]
- Wang, H.; Liu, W.; Zhou, D.; Wang, S.; Du, D. Lumped-parameter model of foundations based on complex Chebyshev polynomial fraction. Soil Dyn. Earthq. Eng. 2013, 50, 192–203. [Google Scholar] [CrossRef]
- Liingaard, M.; Andersen, L.; Ibsen, L.B. Impedance of flexible suction caissons. Earthq. Eng. Struct. Dyn. 2007, 36, 2249–2271. [Google Scholar] [CrossRef]
- Liingaard, M. Dynamic Behaviour of Suction Caissons. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 19 October 2006. [Google Scholar]
- He, R.; Zhang, J.; Chen, W. Using the Elastic Vertical Vibration of a Rigid Caisson at Low Frequencies to Stabilize the Foundation of Coastal Engineering Structures. J. Coastal Res. 2017, 33, 989–996. [Google Scholar] [CrossRef]
- He, R.; Pak, R.Y.S.; Wang, L.Z. Elastic lateral dynamic impedance functions for a rigid cylindrical shell type foundation. Int. J. Numer. Anal. Method. Geomech. 2017, 41, 508–526. [Google Scholar] [CrossRef]
- Doherty, J.P.; Houlsby, G.T.; Deeks, A.J. Stiffness of Flexible Caisson Foundations Embedded in Nonhomogeneous Elastic Soil. J. Geotech. Geoenviron. Eng. 2005, 131, 1498–1508. [Google Scholar] [CrossRef]
- Ba, Z.; Liang, J.; Lee, V.W.; Kang, Z. Dynamic impedance functions for a rigid strip footing resting on a multi-layered transversely isotropic saturated half-space. Eng. Anal. Bound. Elem. 2018, 86, 31–44. [Google Scholar] [CrossRef]
- Liu, M.; Yang, M.; Wang, H. Bearing behavior of wide-shallow bucket foundation for offshore wind turbines in drained silty sand. Ocean Eng. 2014, 82, 169–179. [Google Scholar] [CrossRef]
- Veritas. DNV-OS-J101-Design of Offshore Wind Turbine Structures; Det Norske Veritas: Oslo, Norway, 2004. [Google Scholar]
- IEC 61400-3. Wind Turbines-Part 3: Design Requirements for Offshore Wind Turbines; International Electrotechnical Commission: Geneva, Switzerland, 2009. [Google Scholar]
- Yang, Y.B.; Hung, H.H. A 2.5D finite/infinite element approach for modelling visco-elastic bodies subjected to moving loads. Int. J. Numer. Method. Eng. 2001, 51, 1317–1336. [Google Scholar] [CrossRef]
- Wang, G.; Chen, L.; Song, C. Finite–infinite element for dynamic analysis of axisymmetrically saturated composite foundations. Int. J. Numer. Method. Eng. 2006, 67, 916–932. [Google Scholar] [CrossRef]
- Versteijlen, W.G.; Van Dalen, K.N.; Metrikine, A.V.; Hamre, L. Assessing the small-strain soil stiffness for offshore wind turbines based on in situ seismic measurements. J. Phys. Conf. Ser. 2014, 524, 012088. [Google Scholar] [CrossRef]
- Kuhlemeyer, R.L.; Lysmer, J. Finite element method accuracy for wave propagation problems. J. Soil Mech. Found. Div. 1973, 99, 421–427. [Google Scholar]
- Doherty, J.P.; Deeks, A.J. Elastic response of circular footings embedded in a non-homogeneous half-space. Geotechnique 2003, 8, 703–714. [Google Scholar] [CrossRef]
- Jung, S.; Kim, S.R.; Patil, A.; Hung, L.C. Effect of monopile foundation modeling on the structural response of a 5-MW offshore wind turbine tower. Ocean Eng. 2015, 109, 479–488. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | D (m) | Hb (m) | D/Hb | Hs (m) | Hs/D | t (mm) | t/D | Soil Profile | Es (MPa) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 30 | 3 | 10 | 60 | 2 | 20 | / | A | 6 |
| 2 | 30 | 6 | 5 | 60 | 2 | 20 | / | A | 6 |
| 3 | 30 | 12 | 2.5 | 60 | 2 | 20 | 0.0007 | A | 6 |
| 4 | 30 | 20 | 1.5 | 60 | 2 | 20 | / | A | 6 |
| 5 | 35 | 12 | 3.0 | 60 | 1.7 | 20 | / | A | 6 |
| 6 | 40 | 12 | 3.3 | 60 | 1.5 | 20 | / | A | 6 |
| 7 | 45 | 12 | 3.75 | 60 | 1.3 | 20 | / | A | 6 |
| 8 | 30 | 6 | 5 | 30 | 1 | 20 | / | A | 6 |
| 9 | 30 | 12 | 2.5 | 30 | 1 | 20 | / | A | 6 |
| 10 | 45 | 12 | 3.75 | 30 | 0.7 | 20 | / | A | 6 |
| 11 | 30 | 12 | 2.5 | 60 | 2 | 30 | 0.0010 | A | 6 |
| 12 | 30 | 12 | 2.5 | 60 | 2 | 40 | 0.0013 | A | 6 |
| 13 | 30 | 12 | 2.5 | 60 | 2 | 50 | 0.0016 | A | 6 |
| 14 | 30 | 12 | 2.5 | 60 | 2 | 20 | / | A | 12 |
| 15 | 30 | 12 | 2.5 | 60 | 2 | 20 | / | A | 18 |
| 16 | 30 | 12 | 2.5 | 60 | 2 | 20 | / | A | 24 |
| 17 | 30 | 12 | 2.5 | 60 | 2 | 20 | / | B | b = 1 |
| 18 | 40 | 12 | 3.5 | 60 | 2 | 20 | / | B | b = 1 |
| 19 | 45 | 12 | 3.8 | 60 | 2 | 20 | / | B | b = 1 |
| 20 | 30 | 12 | 2.5 | 60 | 2 | 20 | / | C | b = 0.5 |
| 21 | 40 | 12 | 3.5 | 60 | 2 | 20 | / | C | b = 0.5 |
| 22 | 45 | 12 | 3.8 | 60 | 2 | 20 | / | C | b = 0.5 |
| Soil Layer Number | Soil Category | Thickness of Soil/m | Density/g·cm3 | Modulus of Elasticity/MPa | Cohesion/KPa | Frictional Angle/° |
|---|---|---|---|---|---|---|
| ①2 | Silty sand | 6.0 | 1.97 | 4.0 | 5.0 | 33.8 |
| ①3 | Muddy silty clay | 3.0 | 1.87 | 4.8 | 22.0 | 11.9 |
| ②1 | Silt | 2.5 | 1.92 | 7.41 | 7.0 | 32.4 |
| ②2 | Silt | 2.0 | 2.0 | 5.5 | 3.5 | 33.4 |
| ③1 | Silty clay | 11.5 | 1.87 | 6.44 | 23.9 | 12.7 |
| ③2 | Silty clay | 4.0 | 1.83 | 12.0 | 18.7 | 11.0 |
| ④1 | Silty clay | 4.7 | 2.0 | 16.5 | 56.5 | 18.7 |
| ④2 | Silty clay | 9.3 | 1.87 | 12.6 | 25.0 | 10 |
| ⑥1 | Silty sand | 4.0 | 1.97 | 9.0 | 5.0 | 33.8 |
| ⑥3 | Silty sand | 6.0 | 1.89 | 9.5 | 25.0 | 12.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, J.; Jiang, Q.; Dong, X.; Zhao, Y.; Zhao, H. Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine Using Coupled Finite–Infinite Element Method. Energies 2019, 12, 4370. https://doi.org/10.3390/en12224370
Lian J, Jiang Q, Dong X, Zhao Y, Zhao H. Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine Using Coupled Finite–Infinite Element Method. Energies. 2019; 12(22):4370. https://doi.org/10.3390/en12224370
Chicago/Turabian StyleLian, Jijian, Qi Jiang, Xiaofeng Dong, Yue Zhao, and Hao Zhao. 2019. "Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine Using Coupled Finite–Infinite Element Method" Energies 12, no. 22: 4370. https://doi.org/10.3390/en12224370
APA StyleLian, J., Jiang, Q., Dong, X., Zhao, Y., & Zhao, H. (2019). Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine Using Coupled Finite–Infinite Element Method. Energies, 12(22), 4370. https://doi.org/10.3390/en12224370