A Chance-Constrained Multistage Planning Method for Active Distribution Networks



Abstract
1. Introduction
- (1)
- To introduce a CCP methodology for the planning of ADN considering the uncertainties of load demand, wind and solar generation.
- (2)
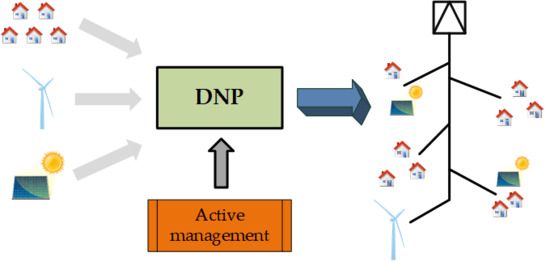
- To develop a multistage planning framework that calculates the optimal location, capacity and time of the investments on substation, distribution lines and capacitors, while examine the effect of the active DG management on the optimal solution of the DNP problem.
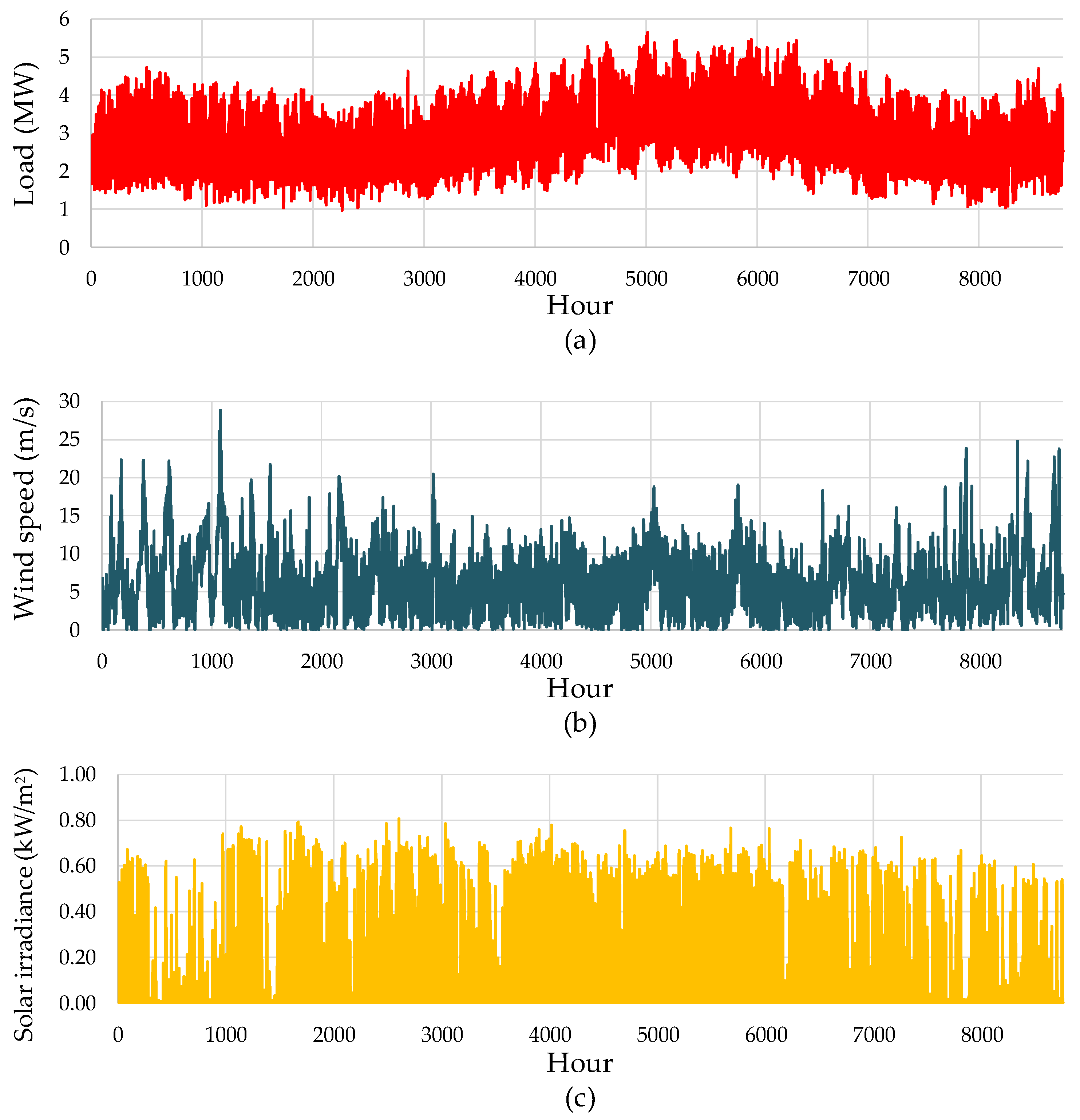
2. Load and Renewable Generation Data Modeling
2.1. The k-Means Clustering Method
2.2. Probabilistic Load-Generation Sets
3. Problem Formulation
3.1. Objective Function
3.2. Constraints
- If , then:
- If , then:
- If , then:
- If , then:
- If , then:
3.3. Chance Constrained DNP Formulation
4. Solution Method
4.1. Input Data
4.2. Chromosome Structure
4.3. Chromosome Evaluation
4.4. Initial Population
4.5. Selection, Crossover, Mutation, and Next Generations
5. Results and Discussion
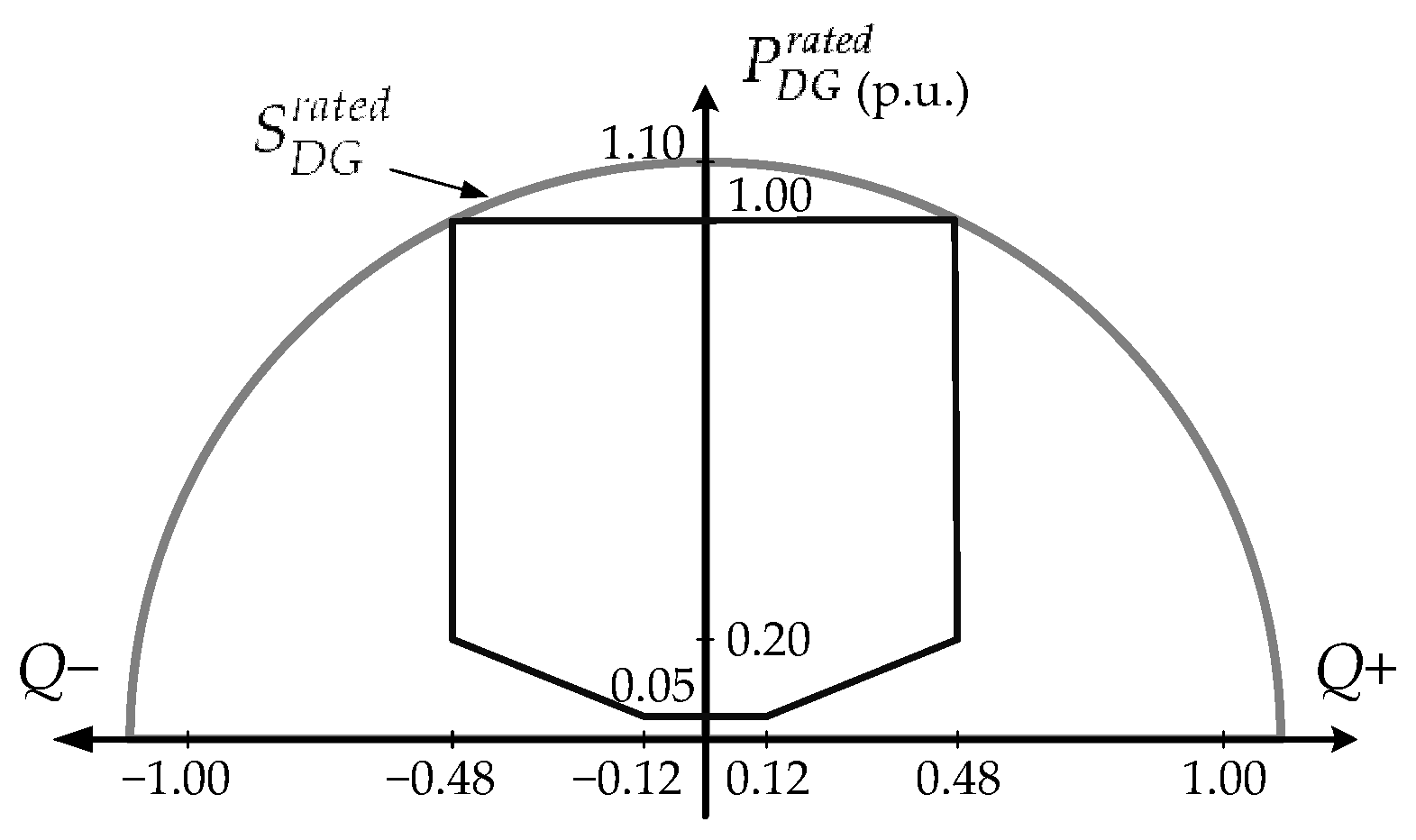
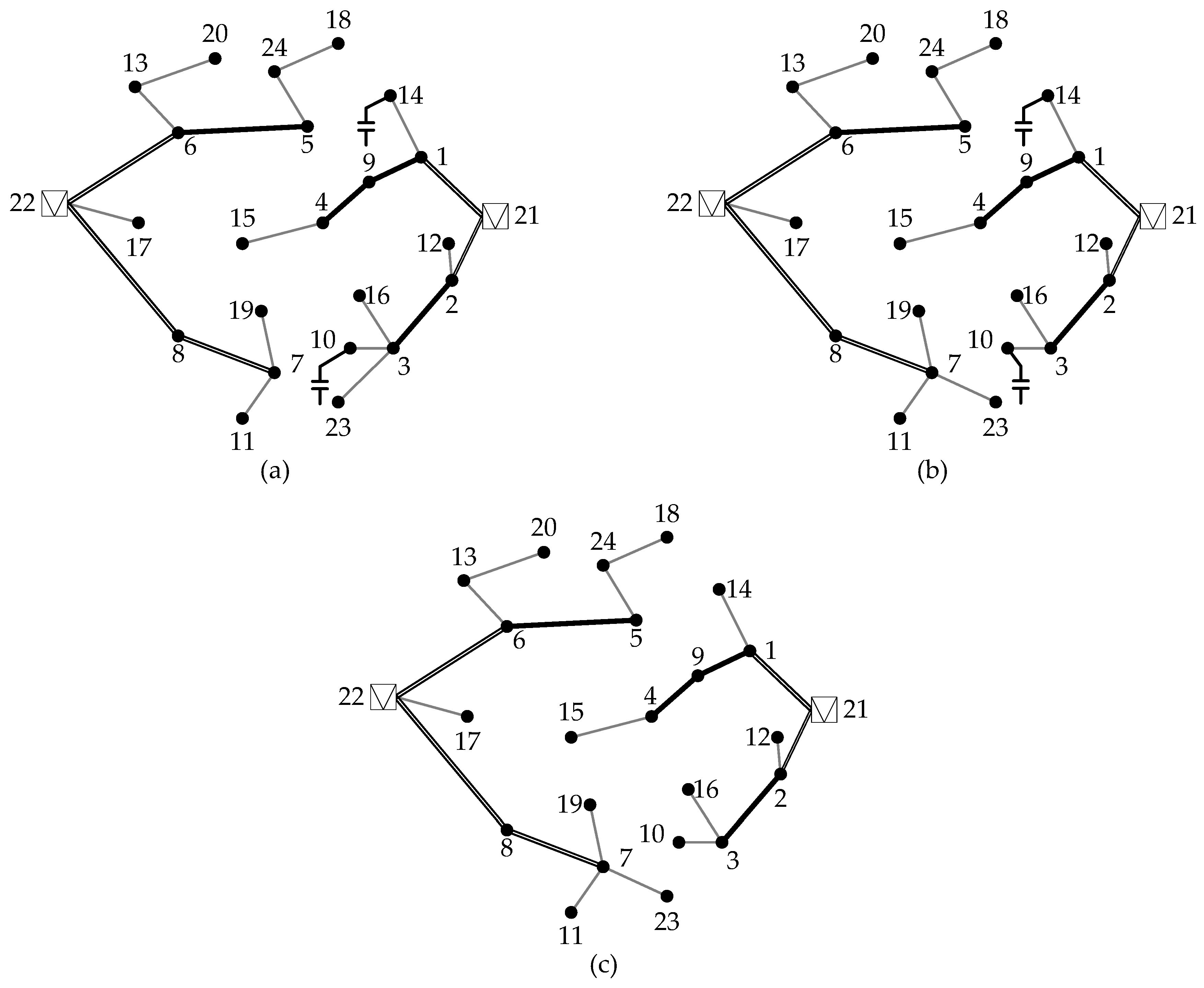
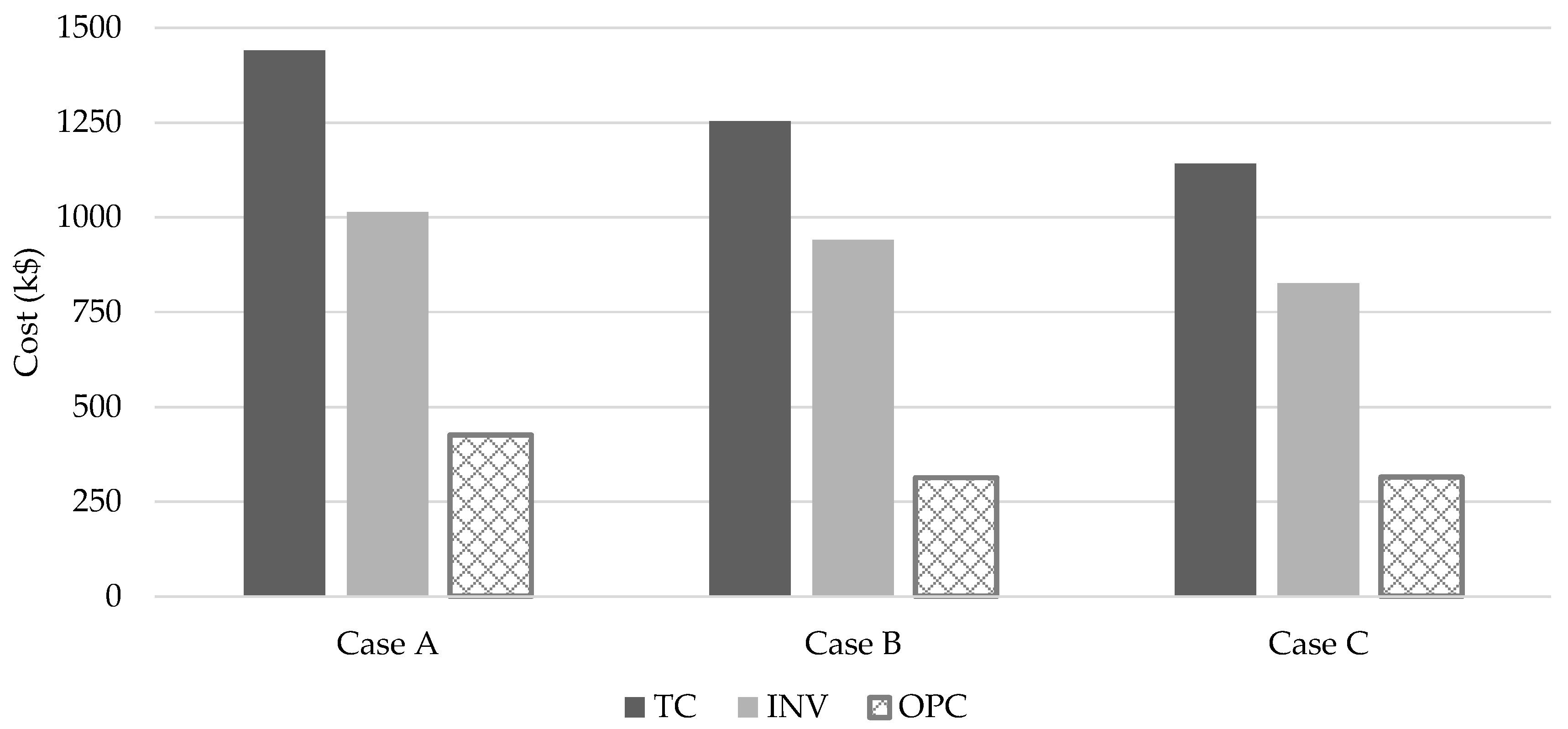
- Case A: The DNP problem is solved considering that the DG units operate with unity power factor (i.e., there is no control of the output power of the DG units). Furthermore, the violation of the voltage and line capacity constraints is not allowed (i.e., ).
- Case B: The DNP problem is solved considering the active management of the DG, while the violation of the voltage and line capacity constraints is not allowed (i.e., ).
- Case C: The DNP problem is solved using the proposed multistage CCP planning method. The active management of DG is incorporated into the planning process and the minor violation of the voltage and line capacity constraints is allowed ().
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| A. Sets | |
| Κ | Load-generation sets. |
| T | Planning period. |
| Set of system buses. | |
| Set of distribution lines. | |
| Set of candidate buses for capacitor. | |
| Set of candidate lines to be added. | |
| Set of candidate lines to be reinforced. | |
| Set of substation buses. | |
| Set of available capacitors. | |
| Set of available conductors. | |
| Set of available substations. | |
| B. Parameters | |
| Cost of type c capacitor. | |
| Cost of type b conductor. | |
| Cost of type a substation. | |
| Cost of losses. | |
| Inflation rate. | |
| Interest rate. | |
| Length of line i–j. | |
| Active/reactive load demand of bus i at the load-generation set k during stage t. | |
| Active power of the distributed generation (DG) unit at bus i at the load-generation set k during stage t. | |
| Rated active power of the DG unit at bus i during stage t. | |
| Rated active power of the solar DG unit at bus i during stage t. | |
| Solar DG at load-generation set k. | |
| Rated active power of the wind DG unit at bus i during stage t. | |
| Wind DG at load-generation set k. | |
| Nominal reactive power of the capacitor at bus i. | |
| Conductance/susceptance of type b conductor. | |
| Maximum apparent power of the DG unit at bus i. | |
| Thermal limit of type b conductor. | |
| Capacity of type a substation. | |
| Solar irradiance, nominal solar irradiance. | |
| Minimum/maximum voltage magnitude limits. | |
| Wind speed, nominal wind speed, cut-in wind speed, cut-out wind speed. | |
| C. Variables | |
| Curtailment factor of the active power output of the DG unit at bus i at the load-generation set k during stage t. | |
| Active/reactive power flow of line i–j at the load-generation set k during stage t. | |
| Power losses at the load-generation set k during stage t. | |
| Active/reactive power flow of substation at bus i at the load-generation set k during stage t. | |
| Reactive power of the DG unit of bus i at the load-generation set k during stage t. | |
| Reactive power of the solar DG unit of bus i at the load-generation set k during stage t. | |
| Reactive power of the wind DG unit of bus i at the load-generation set k during stage t. | |
| Voltage magnitude of bus i at the load-generation set k during stage t. | |
| Voltage angle difference between bus i and j at the load-generation set k during stage t. | |
| D. Binary Variables | |
| Investment decision variable for the reinforcement of substation at bus i using type a substation at period t. | |
| Investment decision variable for the installation of line i–j using type b conductor at period t. | |
| Investment decision variable for the installation of type c capacitor at bus i at period t. | |
| Spanning tree variable. It is equal to 1 if bus i is the parent of bus j at period t; otherwise it is equal to 0. | |
| , , | Auxiliary variables associated with the investment decision variable for the reinforcement of substation at bus i, the installation of line i–j using type b conductor, and the installation of type c capacitor at bus i, respectively, at period t. |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus | P (MW) | Q (Mvar) | Bus | P (MW) | Q (Mvar) |
|---|---|---|---|---|---|
| 1 | 3.33 | 1.61 | 6 | 0.77 | 0.37 |
| 2 | 0.52 | 0.25 | 7 | 2.95 | 1.43 |
| 3 | 2.43 | 1.18 | 8 | 0.47 | 0.23 |
| 4 | 0.30 | 0.14 | 9 | 0.82 | 0.40 |
| 5 | 0.19 | 0.09 |
References
- Lopes, J.P.; Hatziargyriou, N.; Mutale, J.; Djapic, P.; Jenkins, N. Integrating distributed generation into electric power systems: A review of drivers, challenges and opportunities. Electr. Power Syst. Res. 2007, 77, 1189–1203. [Google Scholar] [CrossRef]
- Khator, S.K.; Leung, L.C. Power distribution planning: A review of models and issues. IEEE Trans. Power Syst. 1997, 12, 1151–1159. [Google Scholar] [CrossRef]
- Georgilakis, P.S.; Hatziargyriou, N.D. A review of power distribution planning in the modern power systems era: Models, methods and future research. Electr. Power Syst. Res. 2015, 121, 89–100. [Google Scholar] [CrossRef]
- Li, R.; Wang, W.; Chen, Z.; Jiang, J.; Zhang, W. A review of optimal planning active distribution system: Models, methods, and future researches. Energies 2017, 10, 1715. [Google Scholar] [CrossRef]
- Fichera, A.; Volpe, R.; Frasca, M. Assessment of the energy distribution in urban areas by using the framework of complex network theory. Int. J. Heat Technol. 2016, 34, S430–S434. [Google Scholar] [CrossRef]
- Fichera, A.; Frasca, M.; Volpe, R. The centralized energy supply in a network of distributed energy systems: A cost-based mathematical approach. Int. J. Heat Technol. 2016, 35, S191–S195. [Google Scholar] [CrossRef]
- Ziari, I.; Ledwich, G.; Ghosh, A.; Platt, G. Optimal distribution network reinforcement considering load growth, line loss, and reliability. IEEE Trans. Power Syst. 2012, 28, 587–597. [Google Scholar] [CrossRef]
- Humayd, A.S.B.; Bhattacharya, K. Comprehensive multi-year distribution system planning using back-propagation approach. IET Gener. Transm. Distrib. 2013, 7, 1415–1425. [Google Scholar] [CrossRef]
- Tabares, A.; Franco, J.F.; Lavorato, M.; Rider, M.J. Multistage long-term expansion planning of electrical distribution systems considering multiple alternatives. IEEE Trans. Power Syst. 2015, 31, 1900–1914. [Google Scholar] [CrossRef]
- Zeng, B.; Zhang, J.; Yang, X.; Wang, J.; Dong, J.; Zhang, Y. Integrated planning for transition to low-carbon distribution system with renewable energy generation and demand response. IEEE Trans. Power Syst. 2013, 29, 1153–1165. [Google Scholar] [CrossRef]
- Muñoz-Delgado, G.; Contreras, J.; Arroyo, J.M. Joint expansion planning of distributed generation and distribution networks. IEEE Trans. Power Syst. 2014, 30, 2579–2590. [Google Scholar] [CrossRef]
- Koutsoukis, N.C.; Georgilakis, P.S.; Hatziargyriou, N.D. Multistage coordinated planning of active distribution networks. IEEE Trans. Power Syst. 2017, 33, 32–44. [Google Scholar] [CrossRef]
- Martins, V.F.; Borges, C.L. Active distribution network integrated planning incorporating distributed generation and load response uncertainties. IEEE Trans. Power Syst. 2011, 26, 2164–2172. [Google Scholar] [CrossRef]
- Asensio, M.; de Quevedo, P.M.; Muñoz-Delgado, G.; Contreras, J. Joint distribution network and renewable energy expansion planning considering demand response and energy storage—Part I: Stochastic programming model. IEEE Trans. Smart Grid 2016, 9, 655–666. [Google Scholar] [CrossRef]
- Asensio, M.; de Quevedo, P.M.; Muñoz-Delgado, G.; Contreras, J. Joint distribution network and renewable energy expansion planning considering demand response and energy storage—Part II: Numerical results. IEEE Trans. Smart Grid 2016, 9, 667–675. [Google Scholar] [CrossRef]
- Asensio, M.; Muñoz-Delgado, G.; Contreras, J. Bi-level approach to distribution network and renewable energy expansion planning considering demand response. IEEE Trans. Power Syst. 2017, 32, 4298–4309. [Google Scholar] [CrossRef]
- De Durana, J.M.G.; Barambones, O.; Kremers, E.; Varga, L. Agent based modeling of energy networks. Energy Convers. Manag. 2014, 82, 308–319. [Google Scholar] [CrossRef]
- Kremers, E.; de Durana, J.G.; Barambones, O. Multi-agent modeling for the simulation of a simple smart microgrid. Energy Convers. Manag. 2013, 75, 643–650. [Google Scholar] [CrossRef]
- Fichera, A.; Pluchino, A.; Volpe, R. A multi-layer agent-based model for the analysis of energy distribution networks in urban areas. Physica A 2018, 508, 710–725. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W. Chance-constrained programming. Manag. Sci. 1959, 6, 73–79. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond k-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Tarafdar Hagh, M.; Techato, K.; Muyeen, S.M.; Sadeghian, O. Direct probabilistic load flow in radial distribution systems including wind farms: An approach based on data clustering. Energies 2018, 11, 310. [Google Scholar] [CrossRef]
- Jain, A.K.; Murty, M.N.; Flynn, P.J. Data clustering: A review. ACM Comput. Survey 1999, 31, 264–323. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Steinley, D. K-means clustering: A half-century synthesis. Br. J. Math. Stat. Psychol. 2006, 59, 1–34. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. A K-means clustering algorithm. Appl. Stat. 2012, 28, 100–108. [Google Scholar] [CrossRef]
- Calinski, T.; Harabasz, J. A dendrite method for cluster analysis. Commun. Stat. Theory Methods 1974, 3, 1–27. [Google Scholar] [CrossRef]
- Milligan, G.W.; Cooper, M.C. An examination of procedures for determining the number of clusters in a dataset. Psychometrika 1985, 50, 159–179. [Google Scholar] [CrossRef]
- Koutsoukis, N.C.; Siagkas, D.O.; Georgilakis, P.S.; Hatziargyriou, N.D. Online reconfiguration of active distribution networks for maximum integration of distributed generation. IEEE Trans. Autom. Sci. Eng. 2018, 14, 437–448. [Google Scholar] [CrossRef]
- Nick, M.; Cherkaoui, R.; Paolone, M. Optimal allocation of dispersed energy storage systems in active distribution networks for energy balance and grid support. IEEE Trans. Power Syst. 2014, 29, 2300–2310. [Google Scholar] [CrossRef]
- Sadeghian, O.; Oshnoei, A.; Kheradmandi, M.; Khezri, R.; Mohammadi-Ivatloo, B. A robust data clustering method for probabilistic load flow in wind integrated radial distribution networks. Int. J. Electr. Power Energy Syst. 2020, 115, 105392. [Google Scholar] [CrossRef]
- Kalyani, S.; Swarup, K.S. Particle swarm optimization based K-means clustering approach for security assessment in power systems. Expert Syst. Appl. 2011, 38, 10839–10846. [Google Scholar] [CrossRef]
- Jabr, R.A.; Singh, R.; Pal, B.C. Minimum loss network reconfiguration using mixed-integer convex programming. IEEE Trans. Power Syst. 2012, 27, 1106–1115. [Google Scholar] [CrossRef]
- Koutsoukis, N.; Georgilakis, P.; Hatziargyriou, N. Service restoration of active distribution systems with increasing penetration of renewable distributed generation. IET Gener. Trans. Distrib 2019, 13, 3177–3187. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, F.; Ledwich, G. Optimal siting and sizing of distributed generators in distribution systems considering uncertainties. IEEE Trans. Power Deliv. 2011, 26, 2541–2551. [Google Scholar] [CrossRef]
- Yu, H.; Chung, C.Y.; Wong, K.P.; Zhang, J.H. A chance constrained transmission network expansion planning method with consideration of load and wind farm uncertainties. IEEE Trans. Power Syst. 2009, 24, 1568–1576. [Google Scholar] [CrossRef]
- Franco, J.F.; Rider, M.J.; Romero, R. Robust multi-stage substation expansion planning considering stochastic demand. IEEE Trans. Power Syst. 2015, 31, 2125–2134. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley & Sons: Chichester, UK, 2001. [Google Scholar]
- Miranda, V.; Ranito, J.V.; Proenca, L.M. Genetic algorithms in optimal multistage distribution network planning. IEEE Trans. Power Syst. 1994, 9, 1927–1933. [Google Scholar] [CrossRef]
- Ramirez-Rosado, I.J.; Bernal-Agustin, J.L. Genetic algorithms applied to the design of large power distribution systems. IEEE Trans. Power Syst. 1998, 13, 696–703. [Google Scholar] [CrossRef]
- Carrano, E.G.; Soares, L.A.E.; Takahashi, R.H.C.; Saldanha, R.R.; Neto, O.M. Electric distribution network multiobjective design using a problem-specific genetic algorithm. IEEE Trans. Power Deliv. 2006, 21, 995–1005. [Google Scholar] [CrossRef]
- Yehiay, O. Penalty function methods for constrained optimization with genetic algorithms. Math. Comput. Appl. 2005, 10, 45–56. [Google Scholar]







| Bus | Load (MVA) | Year | Bus | Load (MVA) | Year |
|---|---|---|---|---|---|
| 10 | 1.56 | 1 | 16 | 0.87 | 3 |
| 11 | 1.91 | 2 | 17 | 2.16 | 2 |
| 12 | 0.93 | 2 | 18 | 1.50 | 3 |
| 13 | 1.15 | 2 | 19 | 1.29 | 3 |
| 15 | 3.05 | 2 | 20 | 2.71 | 3 |
| Bus | Type | Rated Power (MW) | Year |
|---|---|---|---|
| 3 | Solar | 4.00 | 2 |
| 7 | Solar | 2.00 | 1 |
| 15 | Wind | 5.00 | 3 |
| 23 | Wind | 5.00 | 1 |
| 24 | Solar | 2.00 | 2 |
| Inflation rate | 2% | |||
| Interest rate | 8% | |||
| Losses cost ($/kWh) | 0.01 | |||
| A. Substations | ||||
| Type | Capacity (MVA) | Cost (k$) | ||
| 1 | 25 | 50 | ||
| B. Conductors | ||||
| Type | R (Ohm/km) | X (Ohm/km) | Ampacity (A) | Cost (k$/km) |
| 1 | 1.27 | 0.42 | 150 | 25 |
| 2 | 0.58 | 0.39 | 280 | 50 |
| 3 | 0.22 | 0.33 | 400 | 75 |
| C. Capacitors | ||||
| Type | Capacity (Mvar) | Cost (k$) | ||
| 1 | 1.2 | 30 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutsoukis, N.; Georgilakis, P. A Chance-Constrained Multistage Planning Method for Active Distribution Networks. Energies 2019, 12, 4154. https://doi.org/10.3390/en12214154
Koutsoukis N, Georgilakis P. A Chance-Constrained Multistage Planning Method for Active Distribution Networks. Energies. 2019; 12(21):4154. https://doi.org/10.3390/en12214154
Chicago/Turabian StyleKoutsoukis, Nikolaos, and Pavlos Georgilakis. 2019. "A Chance-Constrained Multistage Planning Method for Active Distribution Networks" Energies 12, no. 21: 4154. https://doi.org/10.3390/en12214154
APA StyleKoutsoukis, N., & Georgilakis, P. (2019). A Chance-Constrained Multistage Planning Method for Active Distribution Networks. Energies, 12(21), 4154. https://doi.org/10.3390/en12214154