Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids


Abstract
:1. Introduction
2. Stochastic Modeling of a Distribution Grid
2.1. Linear Power Flow Models of a Distribution Grid
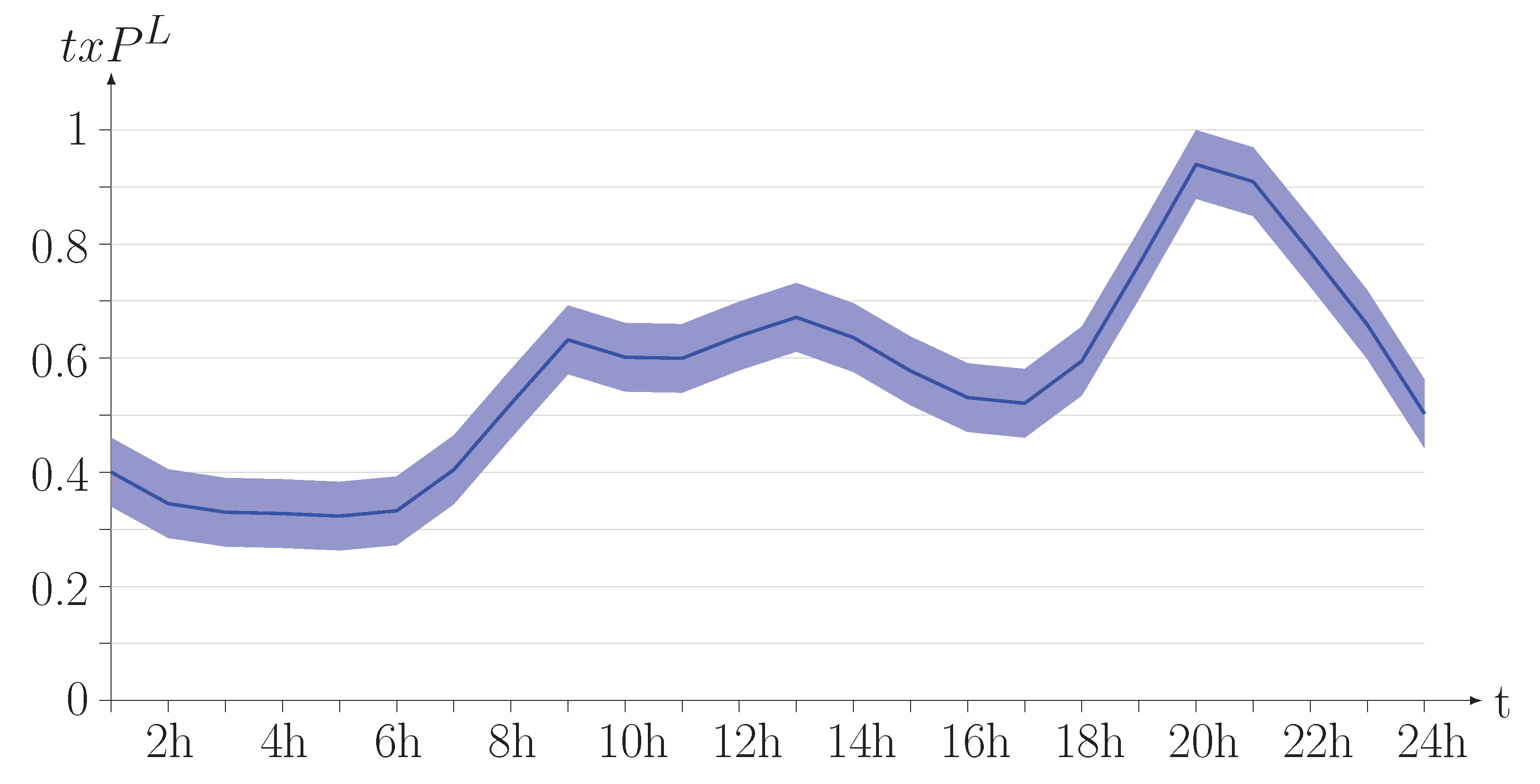
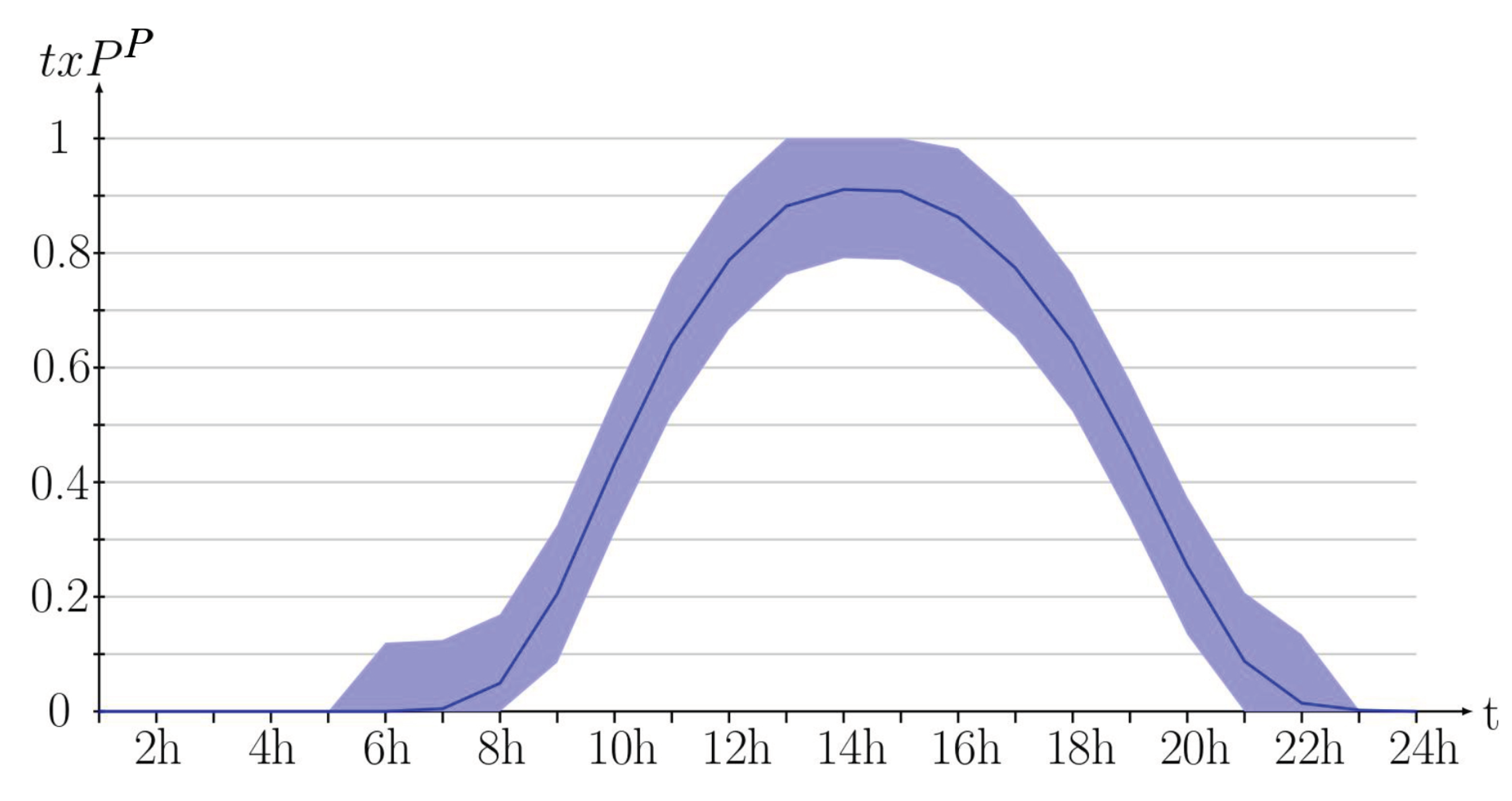
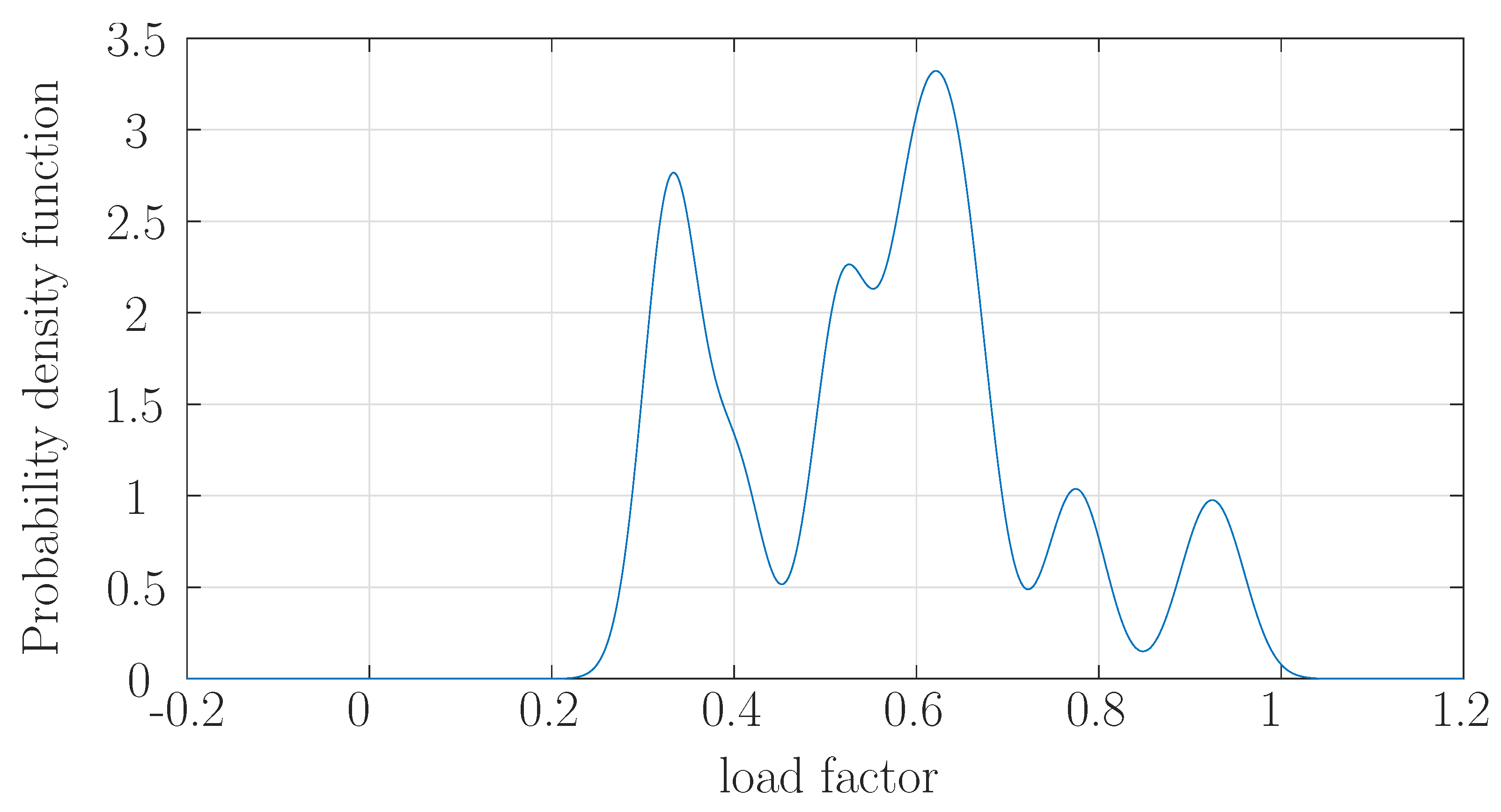
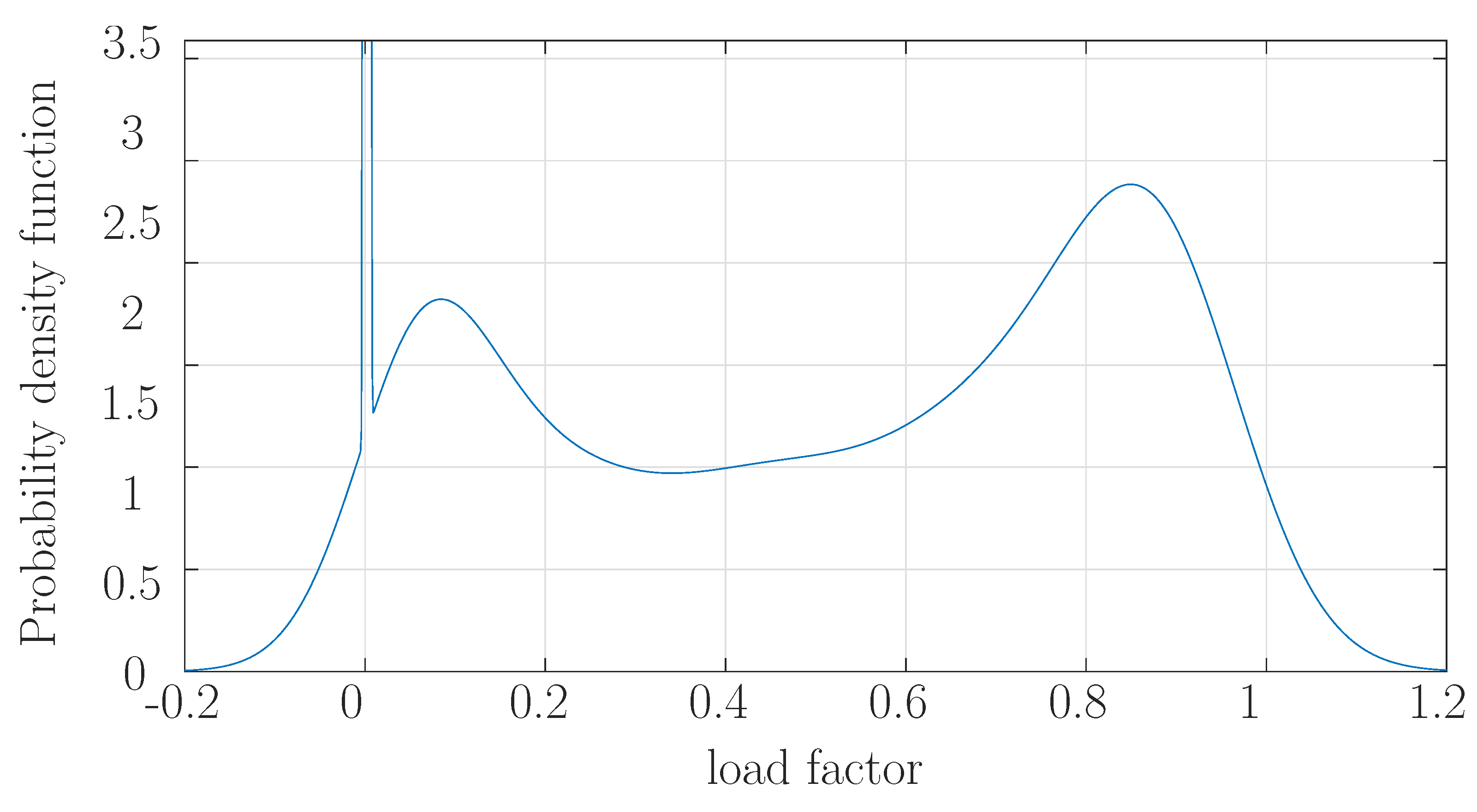
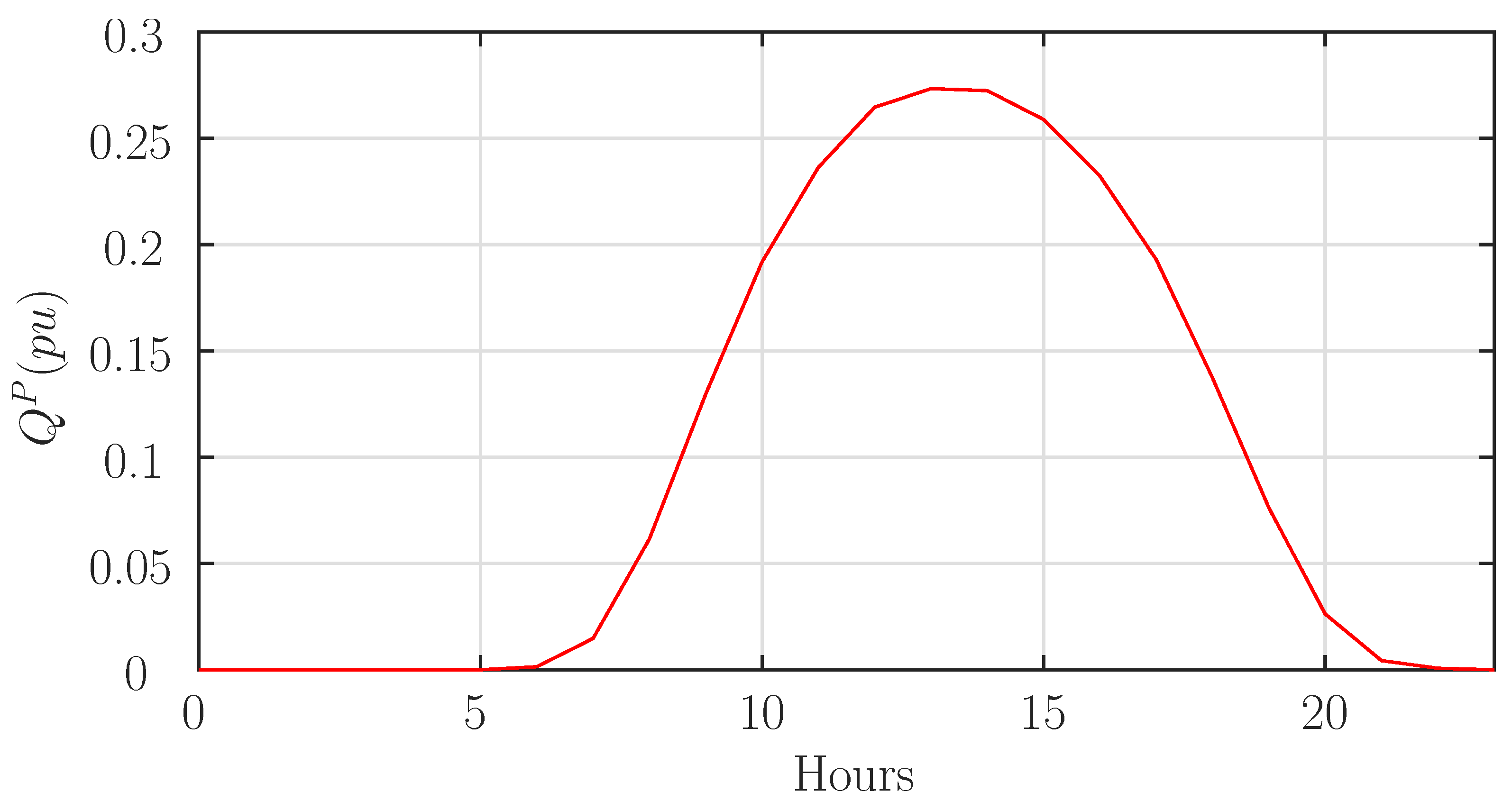
2.2. Daily Stochastic Inputs in a Distribution Grid
- A truncated Gaussian, with truncations 0 and 1, characteristics :
- A Dirac distribution at 0 with which area is the probability that the forecast is below 0:
- A Dirac distribution at 0 with which area is the probability that the forecast is above 1:
3. Two-Stage Optimization Tuning of HV/MV Reactive Power Control
- The OLTC which controls the voltage of the secondary node of the distribution transformer. The controller selects the tap which minimizes the difference between the voltage setpoint and the real secondary voltage. Actuation delays are generally added to avoid untimely tap changing and ensure the stability of the electrical system.
- The reactive powers of DGs located in mixed feeder (with both loads and DGs). These DGs are not usually very influential due to their low impact on voltage changes and risks of over-voltage. Their controllers can be either piecewise linear (with a deadband) or linear with the power and the voltage.
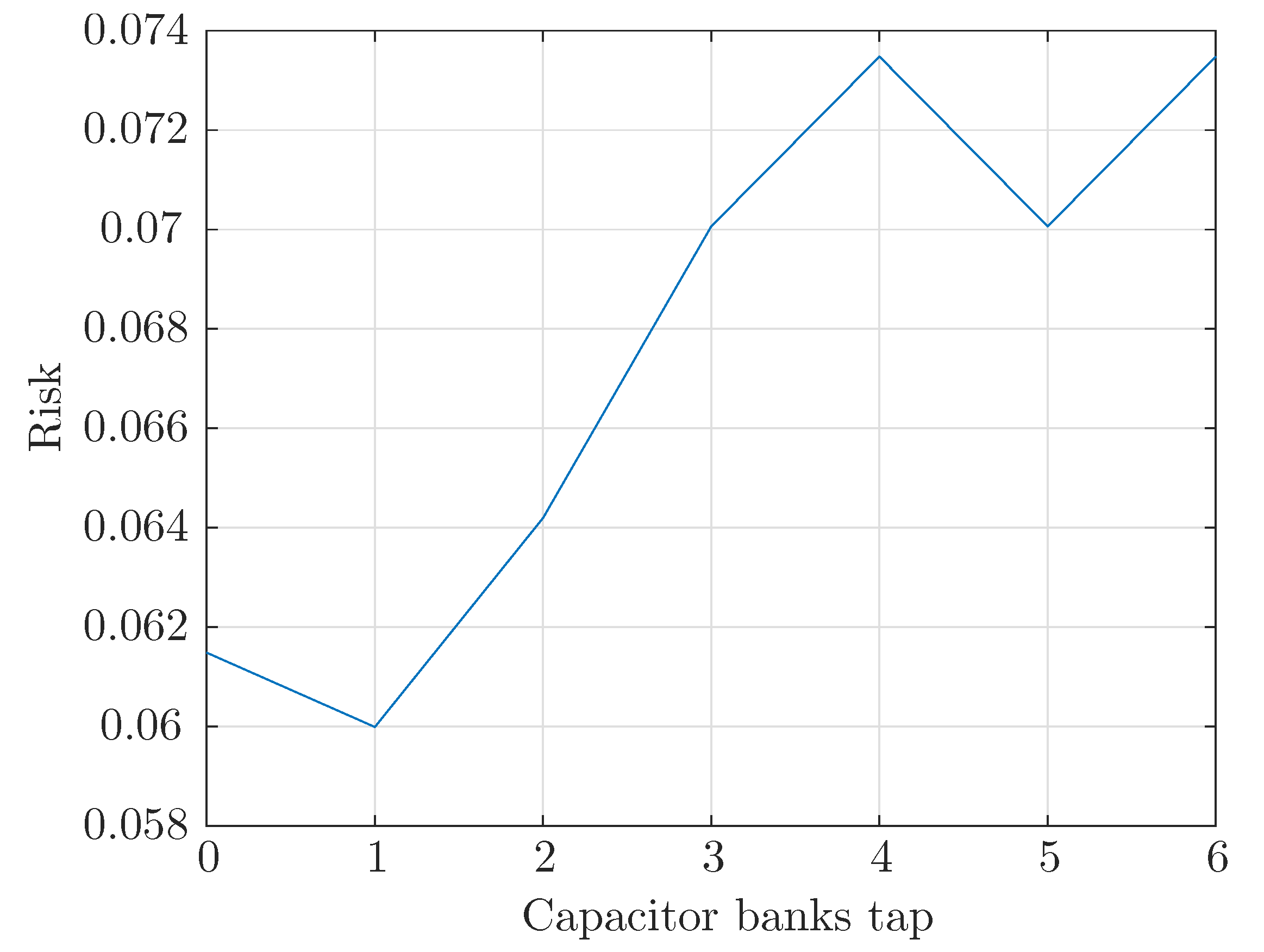
- The capacitor banks which are located at the secondary node of the distribution transformer. Their controller selects a tap for a duration of 24 h.
- The reactive powers of DGs located in dedicated feeders (which embed only DGs). The cables within these feeders are typically sized to avoid overcurrent issues. As a consequence, there are no voltage issues in dedicated feeders. For these DGs, the controllers are affine with the power (it is possible to show that it is useless to use a linear function with the voltage) and can be updated every hour.
3.1. Voltage Control
3.2. Optimization Strategy
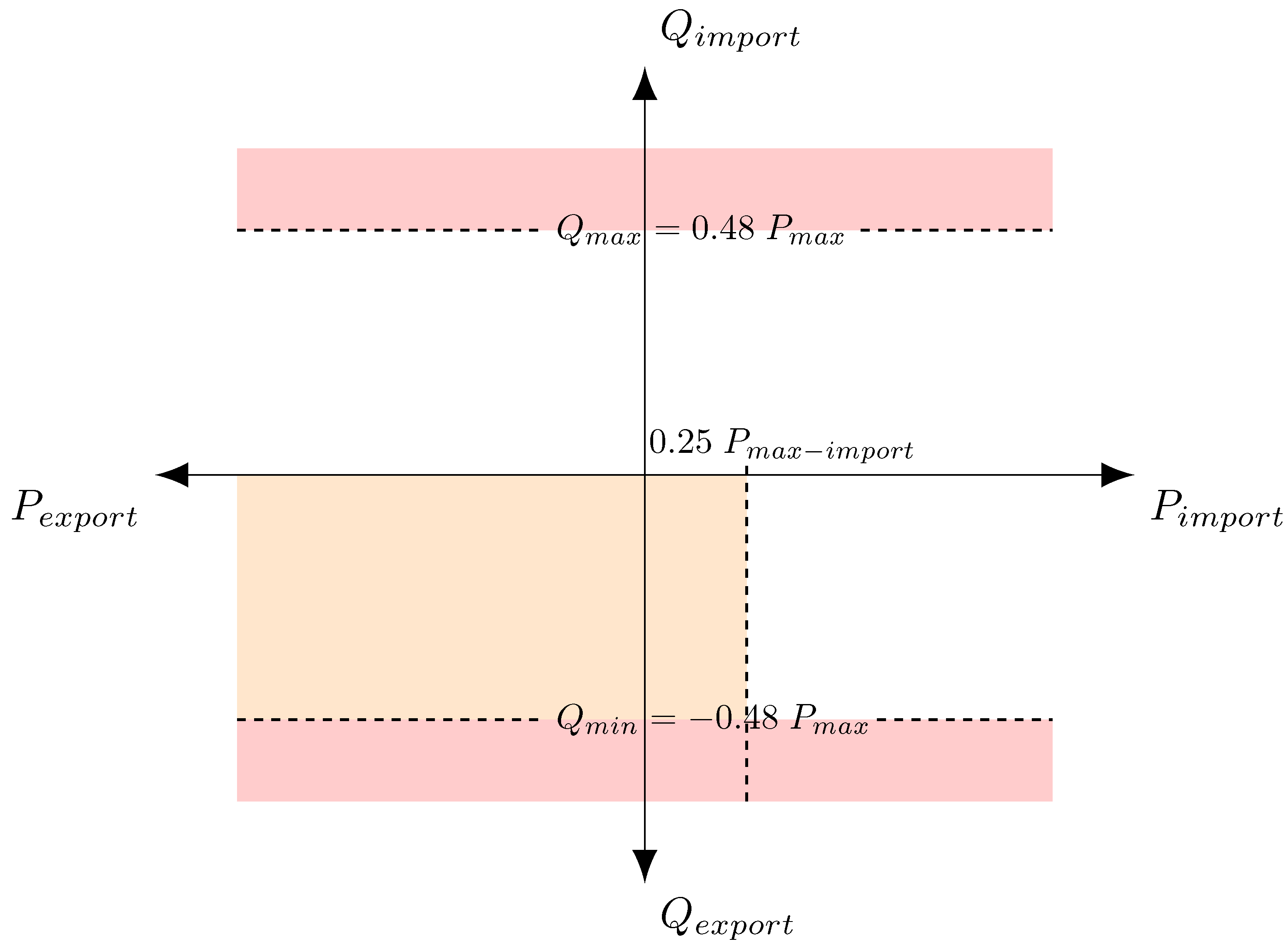
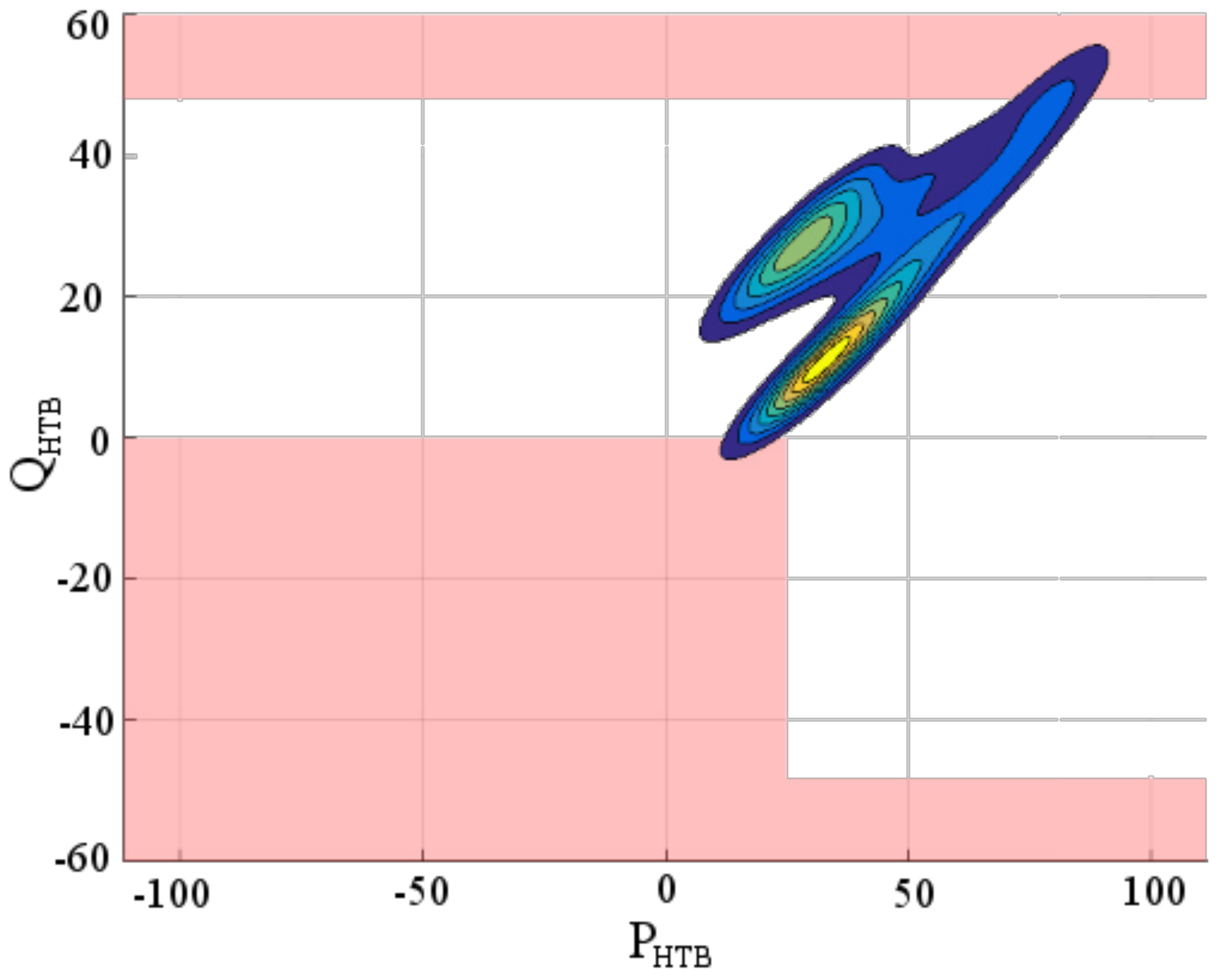
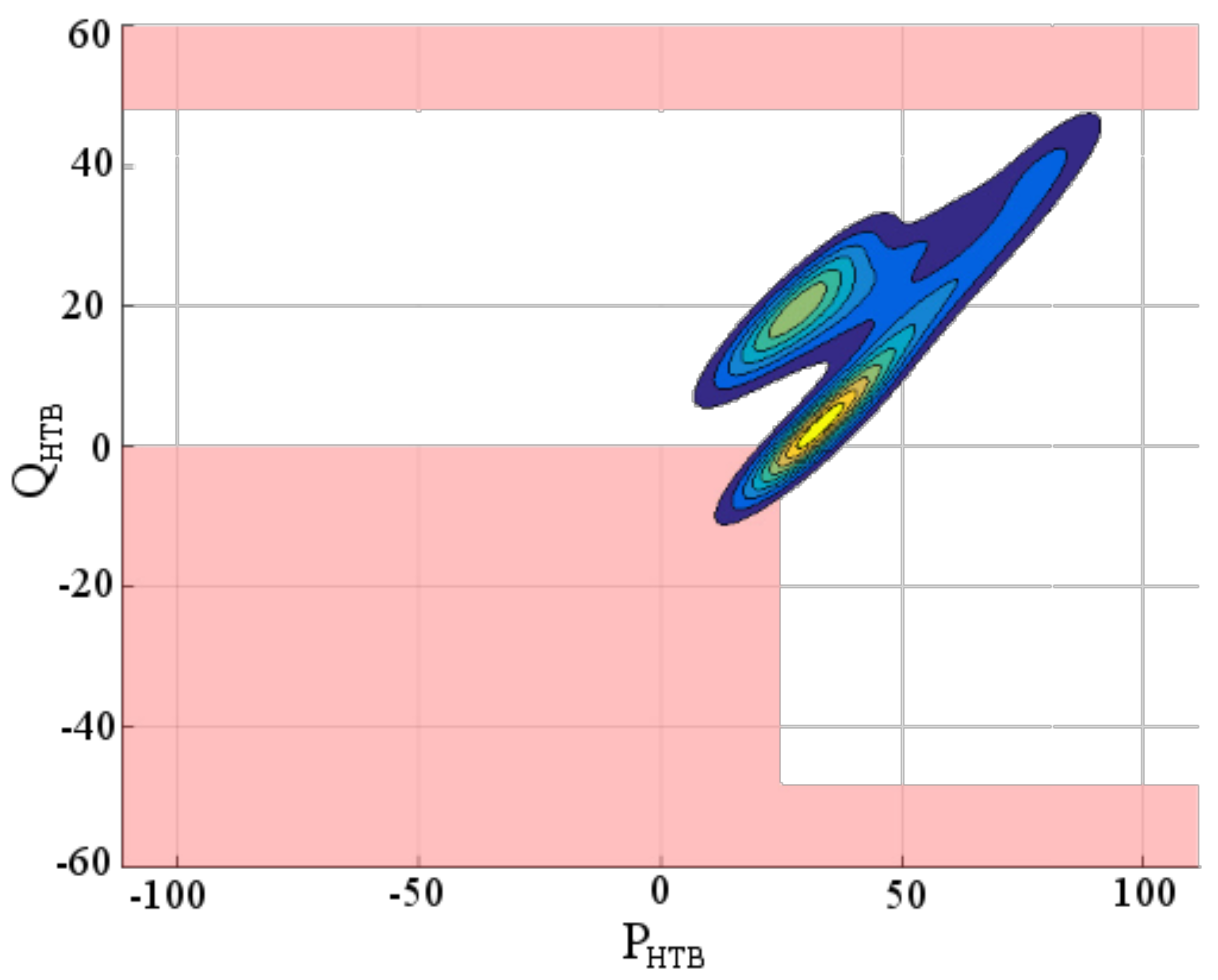
3.3. PQ Diagram Constraints for Fixed Capacitor Bank Tap Position
- The consumption exceeds 48% of the maximal power ( time windows 20 h and 21 h). The DG droop controllers may inject reactive power to decrease the reactive power consumption in the grid.
- On the contrary, when the consumption is quite low (), reactive power can be exported to the transmission grid (hourly windows 3, 4, 5 and 6 h). On the contrary, DGs can be requested to compensate the phenomenon by consuming reactive power.
3.4. Setting a Confidence Level Optimization Problem to Tune DGs Reactive Power Controllers Parameters
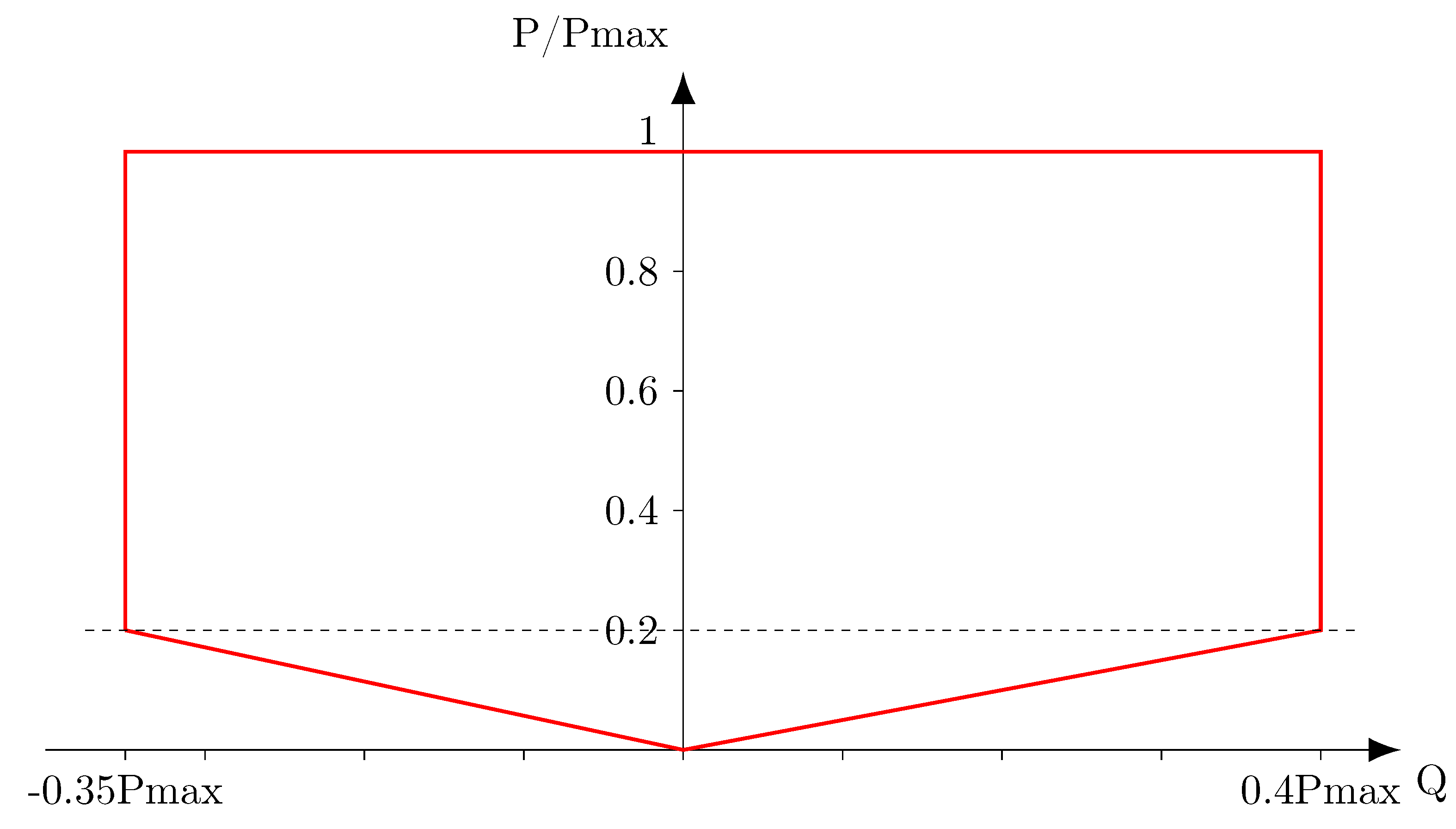
- Maximize confidence levels such that the DG power at node i remains within the contractual PQ domain;
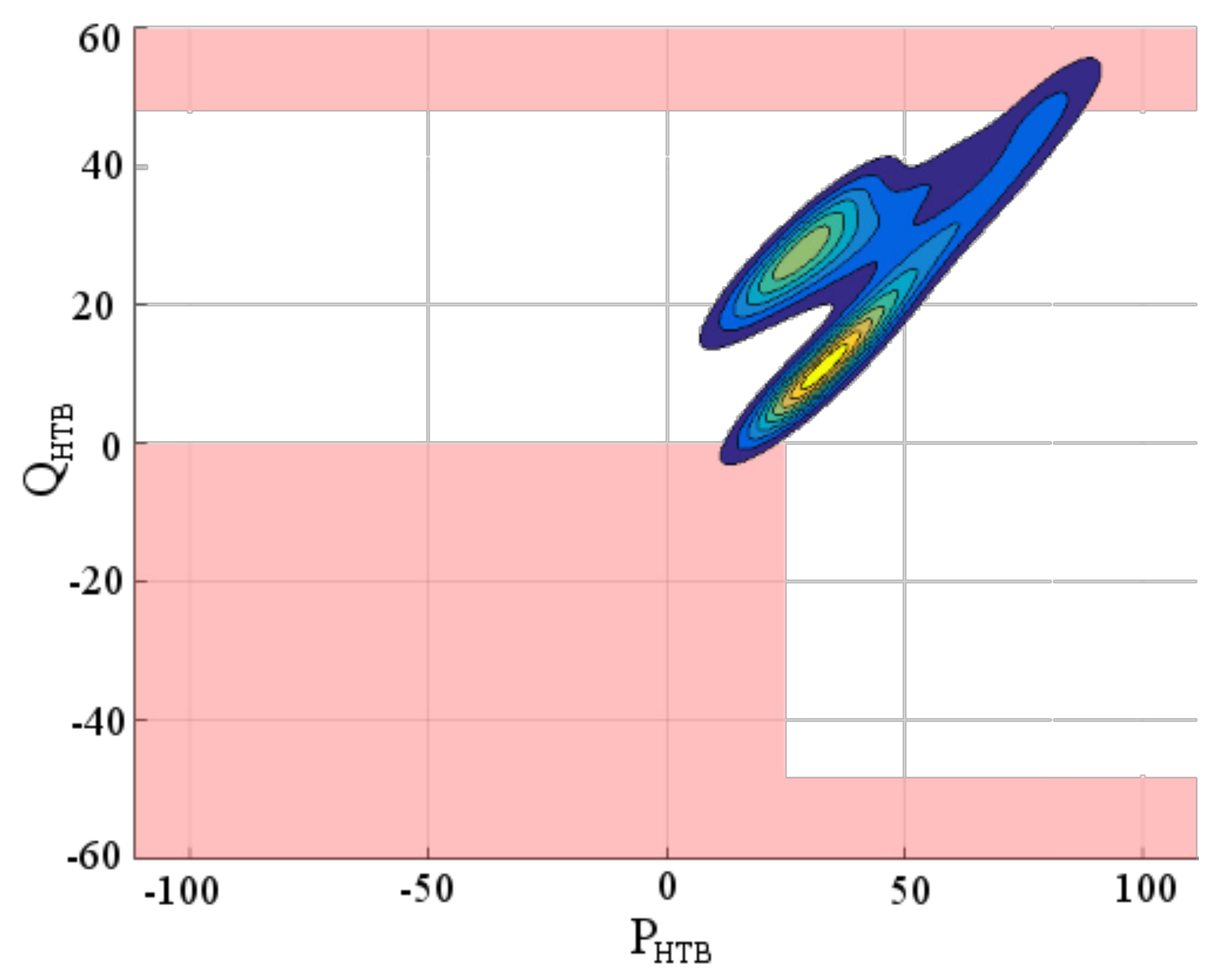
- Maximize confidence level such that the powers at the HV/MV interface remain within the PQ diagram specified in the grid codes, see Figure 1.
- Minimize DG efforts .
- Minimize the variance of the reactive power at the HV/MV interface .
- Confidence levels should be above a specified minimal value for all nodes.
- Confidence levels should be above a specified minimal value for all nodes (that is the confidence levels that the line currents are lower than the maximum authorized current). This constraint is always verified in this study, whatever the consumption or production rates.
- Confidence level should be above a specified minimal value .
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Probability density function | |
| PQ | active and reactive powers |
| DG | Distributed Generator |
| OLTC | On Load Tap Changer |
| HV, MV | High voltage, Medium voltage |
| Number of nodes | |
| m | Number of DGs |
| Vector of 1, dimension n | |
| Vector of voltages, nodes 1 to n: | |
| OLTC node voltage | |
| OLTC node voltage reference | |
| Vector of active powers () | |
| Vector of reactive powers () | |
| DG nominal power at node i | |
| , | Control parameters of the affine law of the DG at node i |
| Mean and standard deviation of the stochastic variable | |
| Normal distribution with mean and variance | |
| Standard Gaussian probabilistic distribution function | |
| Standard Gaussian cumulative distribution function | |
| Objective function weighting factors |
References
- Network Code on Demand Connection DCC. Available online: https://eur-lex.europa.eu/eli/reg/2016/1388/oj (accessed on 23 October 2019).
- Amoasi Acquah, M.; Kodaira, D.; Han, S. Real-Time Demand Side Management Algorithm Using Stochastic Optimization. Energies 2018, 11, 1166. [Google Scholar] [CrossRef]
- Jin, D.; Chiang, H.; Li, P. Two-Timescale Multi-Objective Coordinated Volt/Var Optimization for Active Distribution Networks. IEEE Trans. Power Syst. 2019. [Google Scholar] [CrossRef]
- Ding, T.; Liu, S.; Yuan, W.; Bie, Z.; Zeng, B. A Two-Stage Robust Reactive Power Optimization Considering Uncertain Wind Power Integration in Active Distribution Networks. IEEE Trans. Sustain. Energy 2016, 7, 301–311. [Google Scholar] [CrossRef]
- Deng, X.; He, J.; Zhang, P. A Novel Probabilistic Optimal Power Flow Method to Handle Large Fluctuations of Stochastic Variables. Energies 2017, 10, 1623. [Google Scholar] [CrossRef]
- Soroudi, A.; Amraee, T. Decision making under uncertainty in energy systems: State of the art. Renew. Sustain. Energy Rev. 2013, 28, 376–384. [Google Scholar] [CrossRef]
- Sedghi, M.; Ahmadian, A.; Aliakbar-Golkar, M. Optimal Storage Planning in Active Distribution Network Considering Uncertainty of Wind Power Distributed Generation. IEEE Trans. Power Syst. 2016, 31, 304–316. [Google Scholar] [CrossRef]
- Ahmadian, A.; Sedghi, M.; Aliakbar-Golkar, M.; Fowler, M.; Elkamel, A. Two-layer optimization methodology for wind distributed generation planning considering plug-in electric vehicles uncertainty: A flexible active-reactive power approach. Energy Convers. Manag. 2016, 124, 231–246. [Google Scholar] [CrossRef]
- Buire, J.; Colas, F.; Dieulot, J.; De Alvaro, L.; Guillaud, X. Confidence level optimization of DG piecewise affine controllers in distribution grids. IEEE Trans. Smart Grid 2019, 10, 6126–6136. [Google Scholar] [CrossRef]
- Wang, H.; Kraiczy, M.; Schmidt, S.; Wirtz, F.; Toebermann, C.; Ernst, B.; Kaempf, E.; Braun, M. Reactive Power Management at the Network Interface of EHV- and HV Level. In Proceedings of the International ETG Congress 2017, Bonn, Germany, 28–29 November 2017; pp. 1–6. [Google Scholar]
- Stock, D.S.; Sala, F.; Berizzi, A.; Hofmann, L. Optimal Control of Wind Farms for Coordinated TSO-DSO Reactive Power Management. Energies 2018, 11, 173. [Google Scholar] [CrossRef]
- Saint-Pierre, A.; Mancarella, P. Active Distribution System Management: A Dual-Horizon Scheduling Framework for DSO/TSO Interface Under Uncertainty. IEEE Trans. Smart Grid 2017, 8, 2186–2197. [Google Scholar] [CrossRef]
- Bolognani, S.; Zampieri, S. On the Existence and Linear Approximation of the Power Flow Solution in Power Distribution Networks. IEEE Trans. Power Syst. 2016, 31, 163–172. [Google Scholar] [CrossRef]
- Wang, C.; Bernstein, A.; Le Boudec, J.; Paolone, M. Explicit Conditions on Existence and Uniqueness of Load-Flow Solutions in Distribution Networks. IEEE Trans. Smart Grid 2018, 9, 953–962. [Google Scholar] [CrossRef]
- Buire, J.; Guillaud, X.; Colas, F.; Dieulot, J.; De Alvaro, L. Combination of linear power flow tools for voltages and power estimation on MV networks. In Proceedings of the 24th International Conference and Exhibition on Electricity Distribution, CIRED 2017, Glasgow, UK, 12–15 June 2017; pp. 1–4. [Google Scholar]
- Buire, J.; Guillaud, X.; Colas, F.; Dieulot, J.; De Alvaro, L. Stochastic power flow of distribution networks including dispersed generation system. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference, ISGT Europe, Sarajevo, Bosnia and Herzegovina, 21–25 October 2018; pp. 1–6. [Google Scholar]
- Baker, K.; Bernstein, A.; Dall’Anese, E.; Zhao, C. Network-Cognizant Voltage Droop Control for Distribution Grids. IEEE Trans. Power Syst. 2017, 33, 2098–2108. [Google Scholar] [CrossRef]
- Xie, J.; Hong, T.; Laing, T.; Kang, C. On Normality Assumption in Residual Simulation for Probabilistic Load Forecasting. IEEE Trans. Smart Grid 2017, 8, 1046–1053. [Google Scholar] [CrossRef]
- Pinson, P.; Madsen, H.; Nielsen, H.A.; Papaefthymiou, G.; Klöckl, B. From probabilistic forecasts to statistical scenarios of short-term wind power production. Wind Energy 2009, 12, 51–62. [Google Scholar] [CrossRef]
- Buire, J.; Guillaud, X.; Colas, F.; Dieulot, J.; De Alvaro, L. Confidence-Level Optimization in Distribution Grids for Voltage Droop Controllers Tuning. In Proceedings of the PSCC PES Power Systems Computation Conference, Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]
- Network Code on Requirements for Generators RfG. Available online: https://eur-lex.europa.eu/eli/reg/2016/631/oj (accessed on 23 October 2019).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Uncertainty (in % of Nominal or Reference Power) | Standard Deviation |
|---|---|
| Aggregated load forecast uncertainty | 3.45% |
| Load spreading uncertainty | 50% |
| Production forecast uncertainty (photovoltaic energy) | 17.16% |
| OLTC uncertainty | 0.005 p.u. |
| Hour | PQ Diagram Outage Risk | PQ Diagram Outage Risk | |||
|---|---|---|---|---|---|
| et | Optimized Parameters | ||||
| 1 | 0 | 0 | 0 | 0.0011 | 0.0011 |
| 2 | 0 | 0 | 0 | 0.0038 | 0.0038 |
| 3 | 0 | 0 | 0 | 0.0050 | 0.0050 |
| 4 | 0 | 0 | 0 | 0.0052 | 0.0052 |
| 5 | 0 | 0 | 0 | 0.0056 | 0.0056 |
| 6 | 0.0000 | 0 | 0 | 0.0048 | 0.0048 |
| 7 | 0.0048 | 0 | 0 | 0.0010 | 0.0010 |
| 8 | 0.0492 | 0 | 0 | 0.0000 | 0.0000 |
| 9 | 0.2053 | 0 | 0 | 0.0000 | 0.0000 |
| 10 | 0.4323 | 0 | 0 | 0.0000 | 0.0000 |
| 11 | 0.6394 | 0 | 0 | 0.0000 | 0.0000 |
| 12 | 0.7876 | 0 | 0 | 0.0000 | 0.0000 |
| 13 | 0.8818 | 0 | 0 | 0.0001 | 0.0001 |
| 14 | 0.9109 | 0 | 0 | 0.0000 | 0.0000 |
| 15 | 0.9078 | 0 | 0 | 0.0000 | 0.0000 |
| 16 | 0.8626 | 0 | 0 | 0.0000 | 0.0000 |
| 17 | 0.7739 | 0 | 0 | 0.0000 | 0.0000 |
| 18 | 0.6430 | 0 | 0 | 0.0000 | 0.0000 |
| 19 | 0.4573 | 0 | 0 | 0.0009 | 0.0009 |
| 20 | 0.2540 | 0 | 0.235 | 0.0185 | 0.0072 |
| 21 | 0.0875 | 2 | 0 | 0.0126 | 0.0107 |
| 22 | 0.0144 | 0 | 0 | 0.0012 | 0.0012 |
| 23 | 0.0024 | 0 | 0 | 0.0000 | 0.0000 |
| 24 | 0 | 0 | 0 | 0.0001 | 0.0001 |
| Cumulative risk | 0.0600 | 0.0467 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buire, J.; Colas, F.; Dieulot, J.-Y.; Guillaud, X. Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids. Energies 2019, 12, 4057. https://doi.org/10.3390/en12214057
Buire J, Colas F, Dieulot J-Y, Guillaud X. Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids. Energies. 2019; 12(21):4057. https://doi.org/10.3390/en12214057
Chicago/Turabian StyleBuire, Jérôme, Frédéric Colas, Jean-Yves Dieulot, and Xavier Guillaud. 2019. "Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids" Energies 12, no. 21: 4057. https://doi.org/10.3390/en12214057
APA StyleBuire, J., Colas, F., Dieulot, J.-Y., & Guillaud, X. (2019). Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids. Energies, 12(21), 4057. https://doi.org/10.3390/en12214057