Advanced MPPT Algorithm for Distributed Photovoltaic Systems


Abstract
1. Introduction
2. Distributed PV System and Proposed MPPT Algorithm
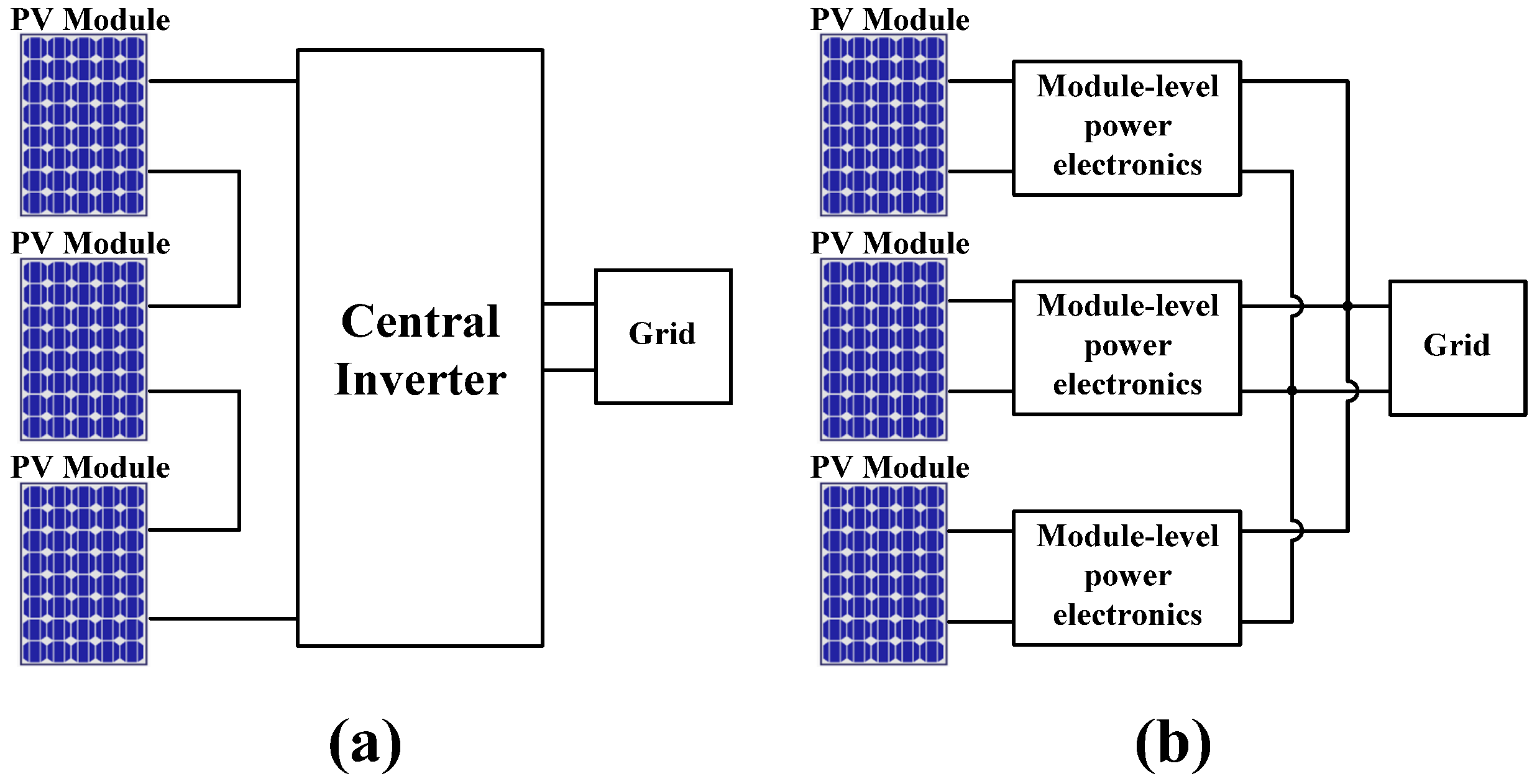
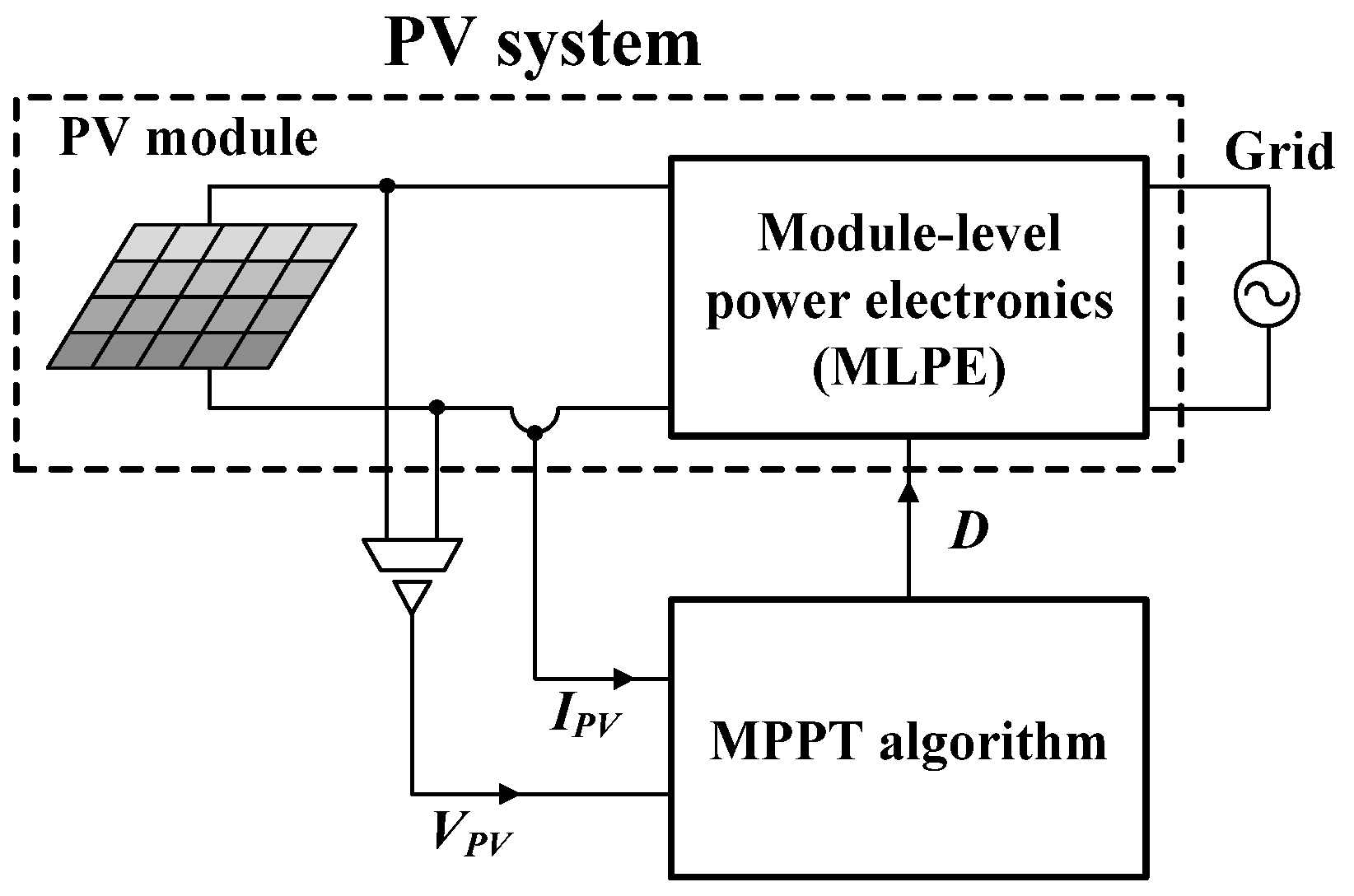
2.1. Distributed PV System
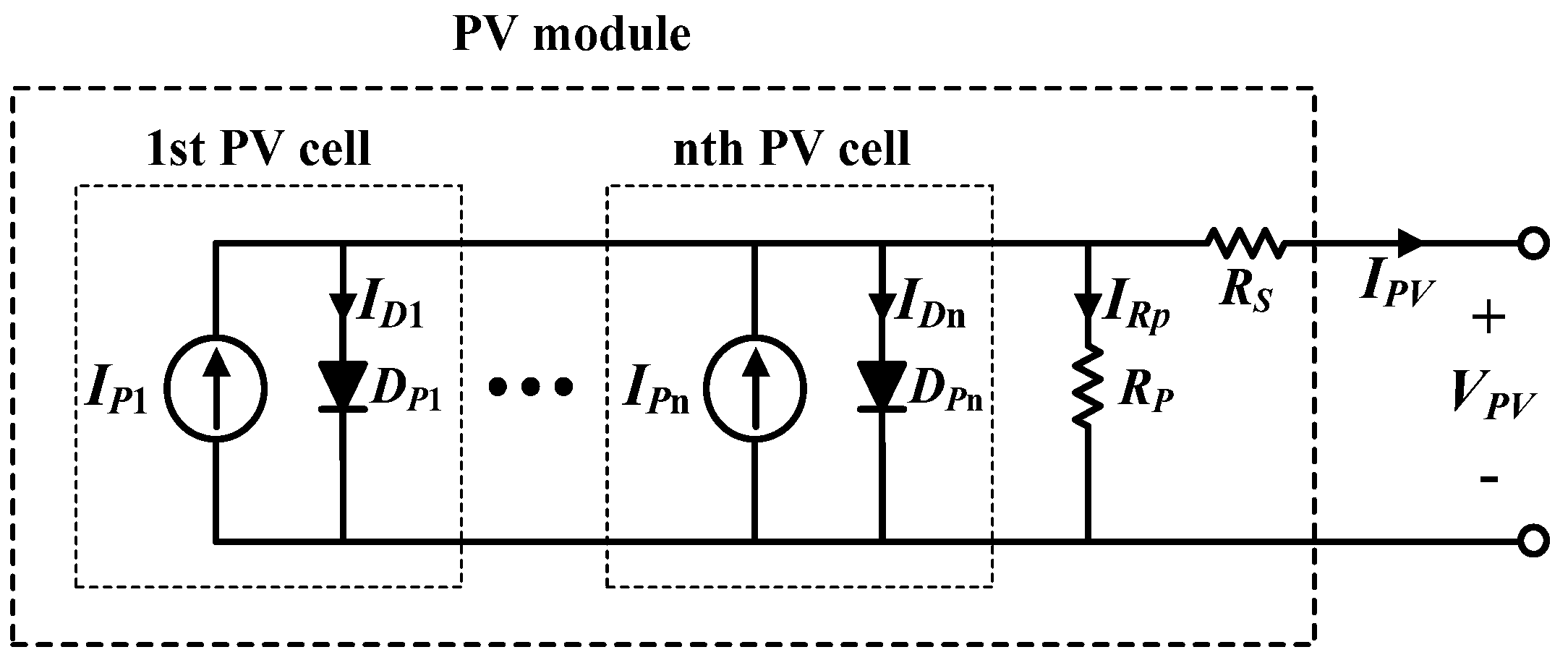
2.1.1. PV Module
2.1.2. Module-Level Power Electronics (MLPE)
2.2. Prospoed MPPT Algorithm
2.2.1. Principle of the Algorithm
2.2.2. Flow Chart
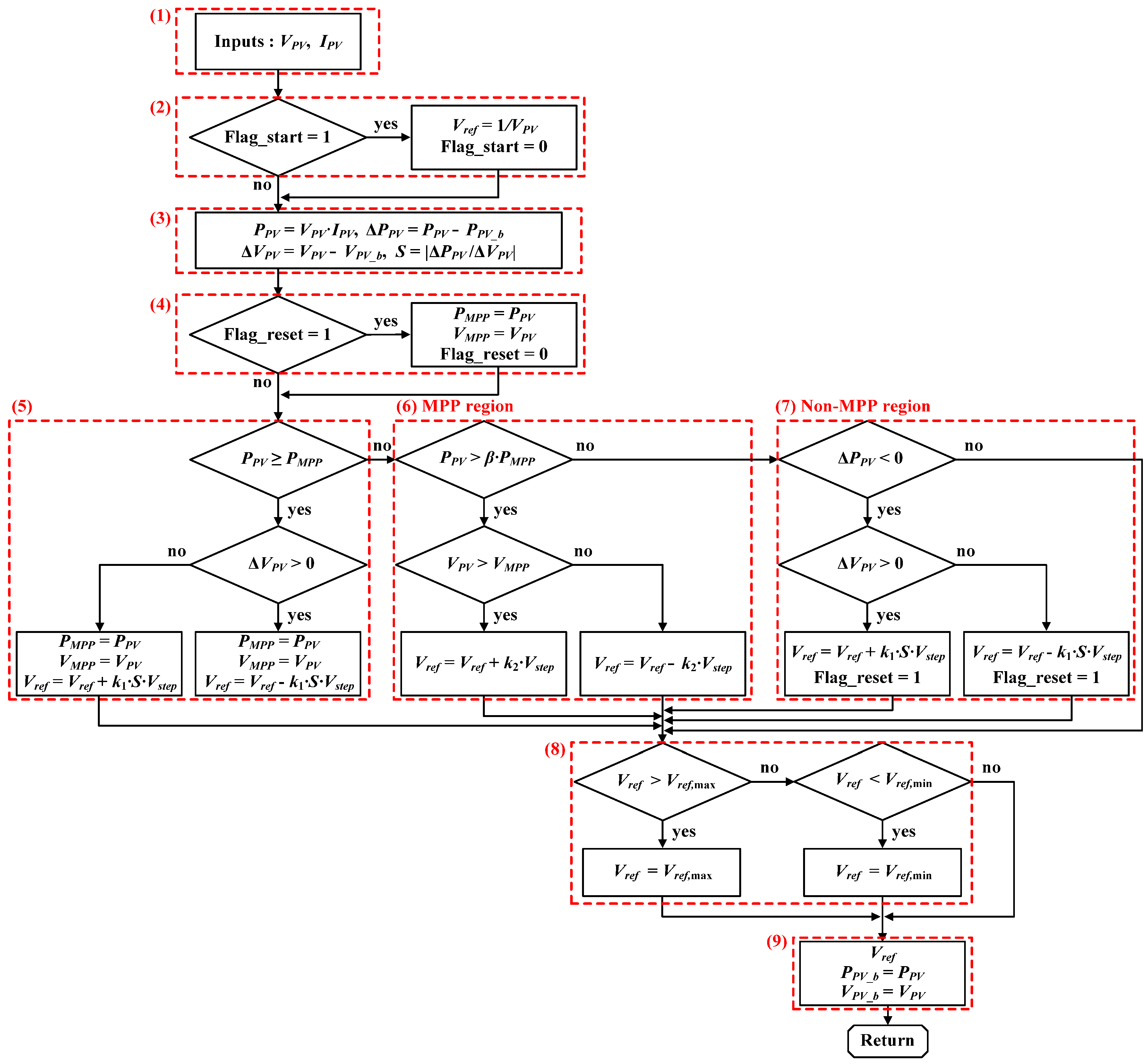
- The present VPV and IPV of the PV module are used as the input signals for the proposed MPPT algorithm. The variable “Flag_start” is preset to 1 for fast tracking speed at the starting point of VPV = VOC, and the variable “Flag_reset” is preset to 1 for setting the PMPP and VMPP to the present PPV and VPV, where PPV = VPV∙IPV.
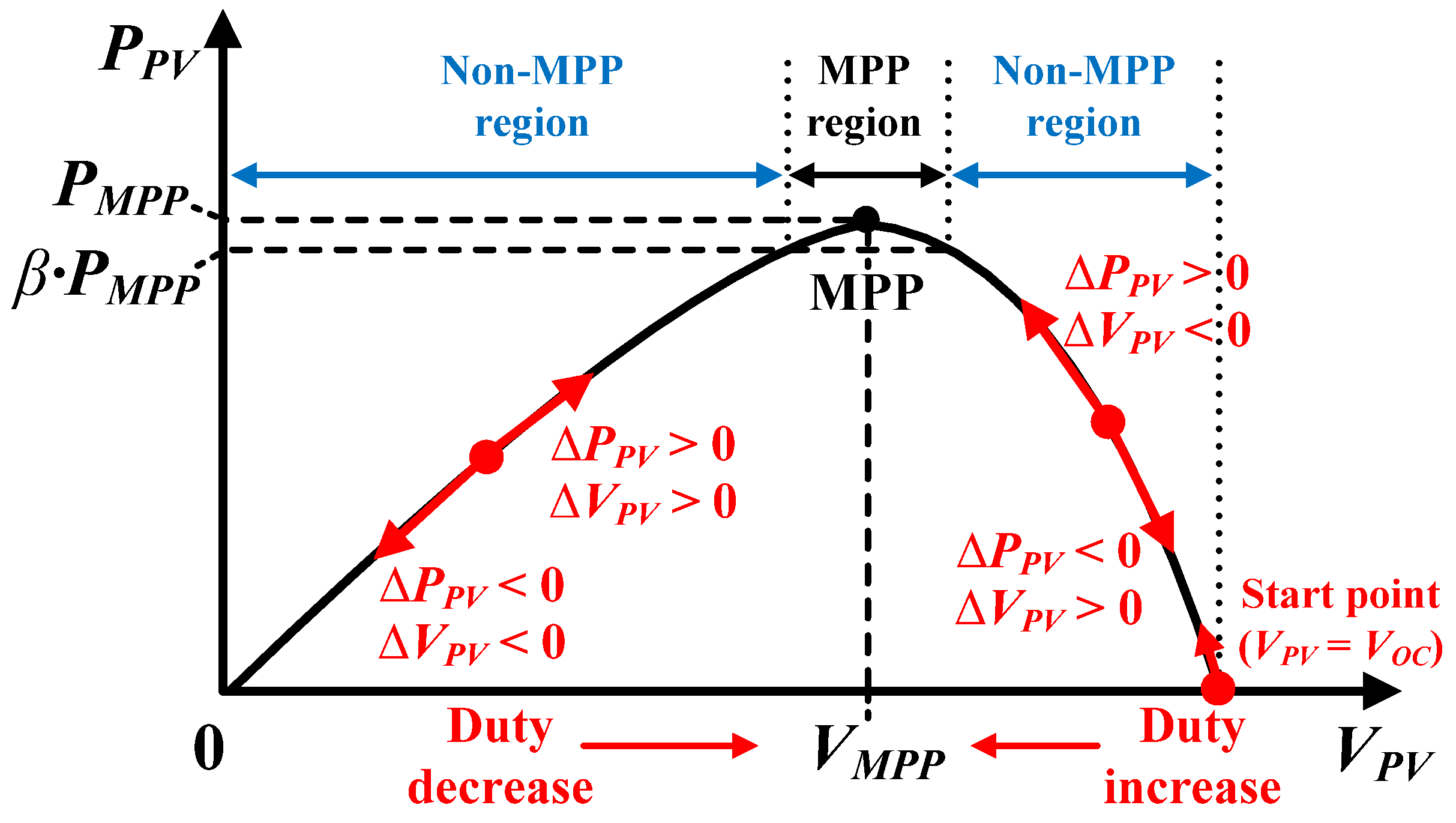
- If Flag_start is 1, it is determined that the operating point is located at the starting point of VPV = VOC. Therefore, the reference variable (Vref) is initially set to 1/VPV (=1/VOC) and the operating point moves rapidly toward the MPP. After that, Flag_start is set to 0.
- In this process, PPV is calculated as VPV∙IPV, ΔPPV and ΔVPV are calculated using present (PPV and VPV) and previous (PPV_b and VPV_b) values, and the slope coefficient (S) is calculated as |ΔPPV/ΔVPV|.
- If Flag_reset is 1, PMPP and VMPP are set to the present PPV and VPV, and then Flag_reset is set to 0.
- If the present PPV is higher than PMPP, it is determined that the MPP has not been found yet. Therefore, the operating point is forced to keep moving toward the MPP, and PMPP and VMPP are reset to the present PPV and VPV. To quickly find the MPP, the variable step size (=k1∙S∙Vstep) is used in this process.
- If the operating point is located in the MPP region, the small fixed step size (=k2∙Vstep) is used to track the MPP accurately.
- If PPV is lower than the boundary value (β∙PMPP) between the MPP and non-MPP regions, it is determined that the operating point is located in non-MPP region. This process is usually performed under dynamic weather conditions because the MPP changes under these conditions. Therefore, Flag_reset is set to 1 to find a new MPP, and the variable step size (=k1∙S∙Vstep) is automatically adjusted according to the slope of ΔPPV/ΔVPV for a fast dynamic response.
- Vref is limited by the maximum and minimum values (Vref,max and Vref,min) of Vref to prevent malfunction of the DC–DC converter in the MLPEs.
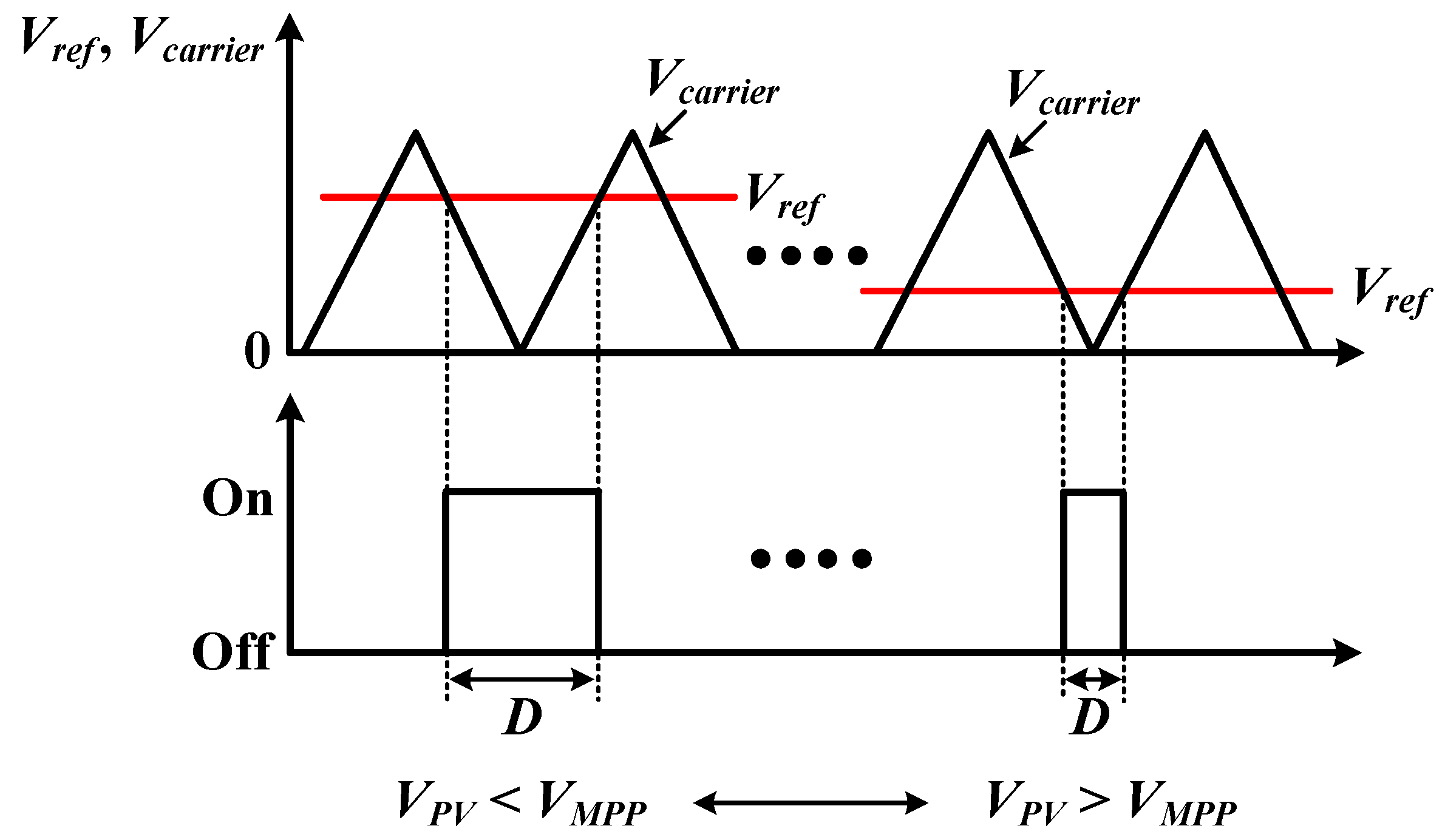
- Through the above processes, a new Vref is obtained. Vref is compared with the carrier signal (Vcarrier) in the digital signal processor (DSP), and a new duty ratio (D) is generated to control the DC–DC converter in the MLPE (Figure 11). In addition, the previous values (PPV_b and VPV_b) are obtained at this time.
2.2.3. Design Considerations
3. Experimental Results and Discussion
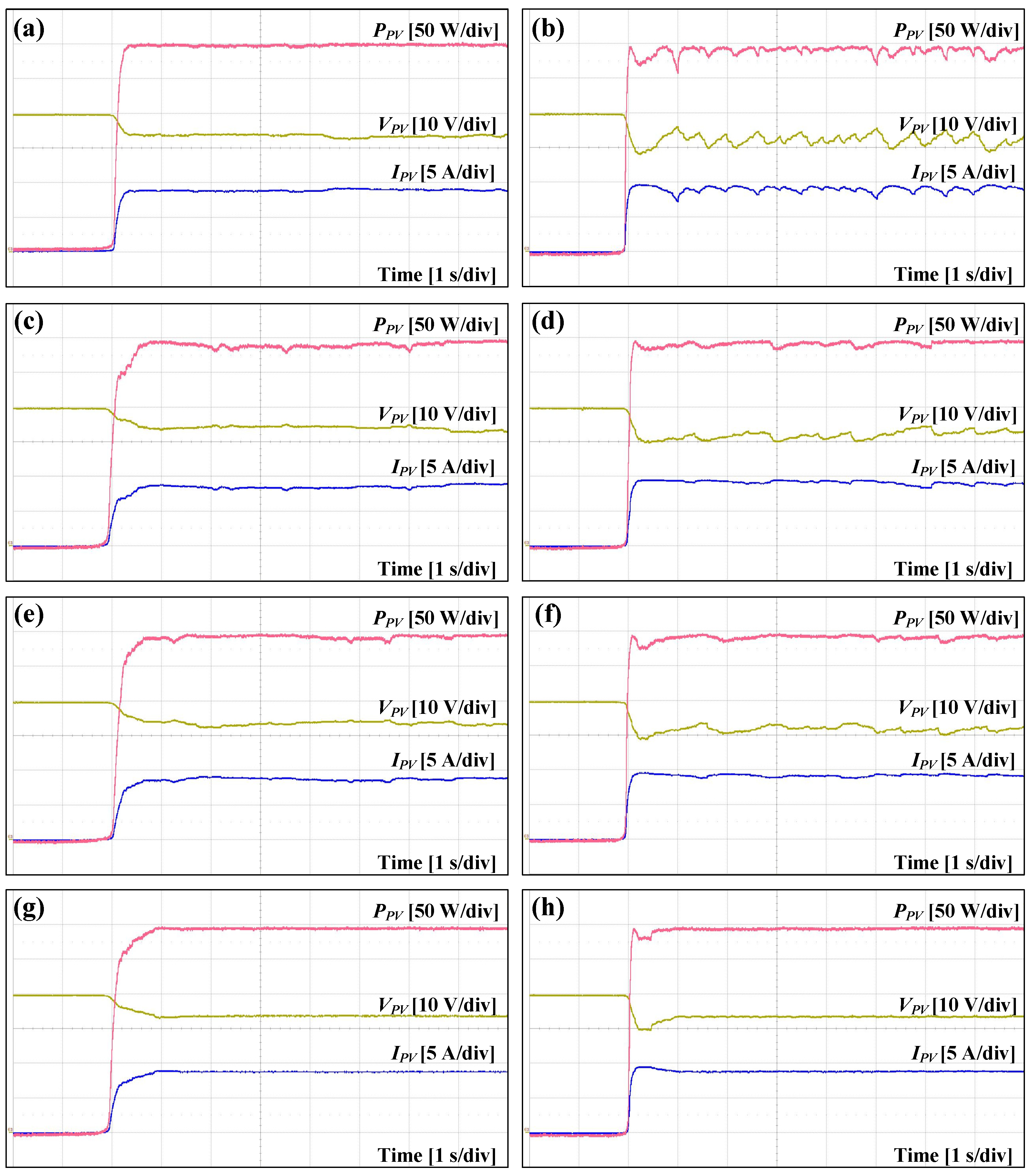
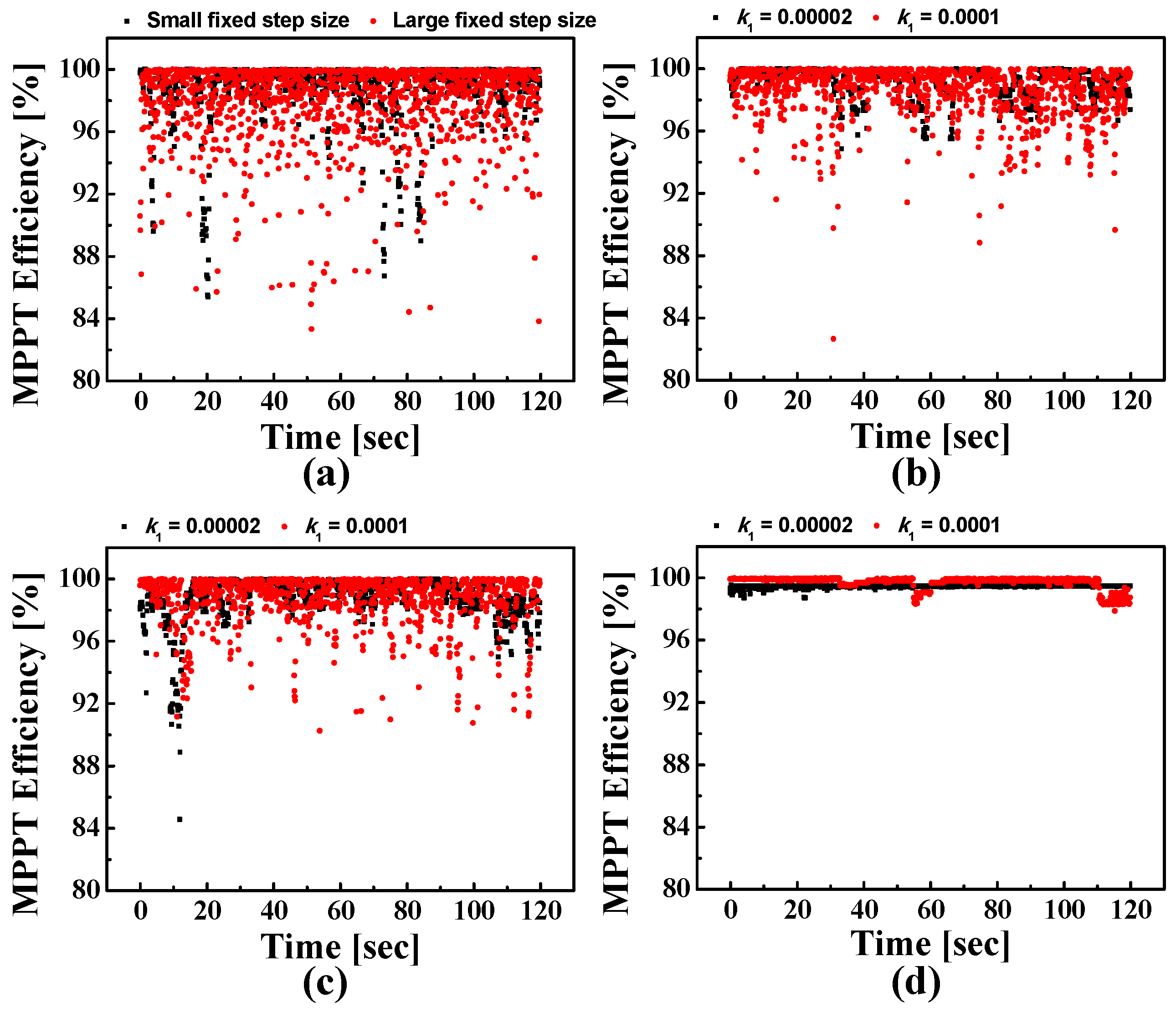
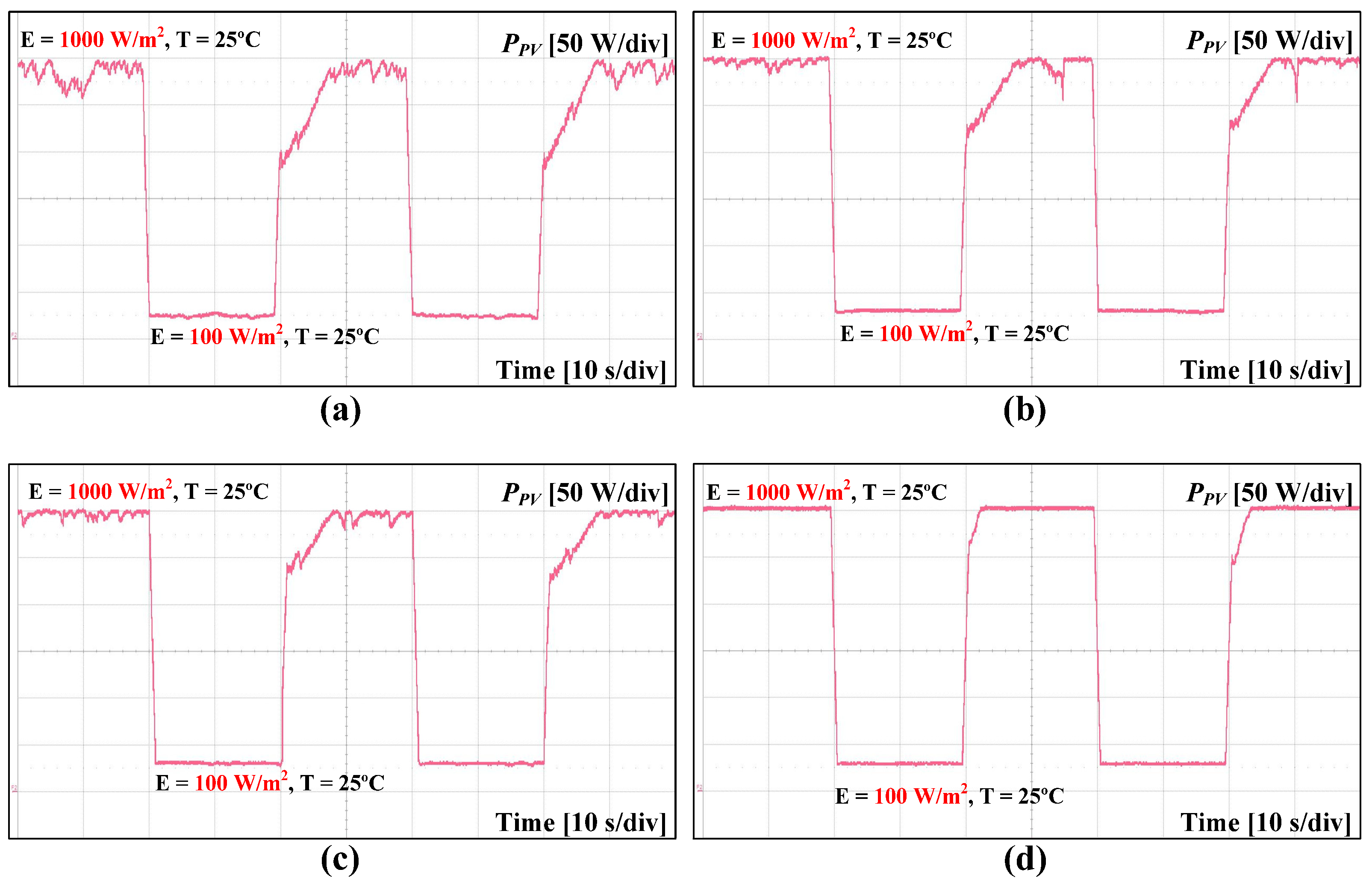
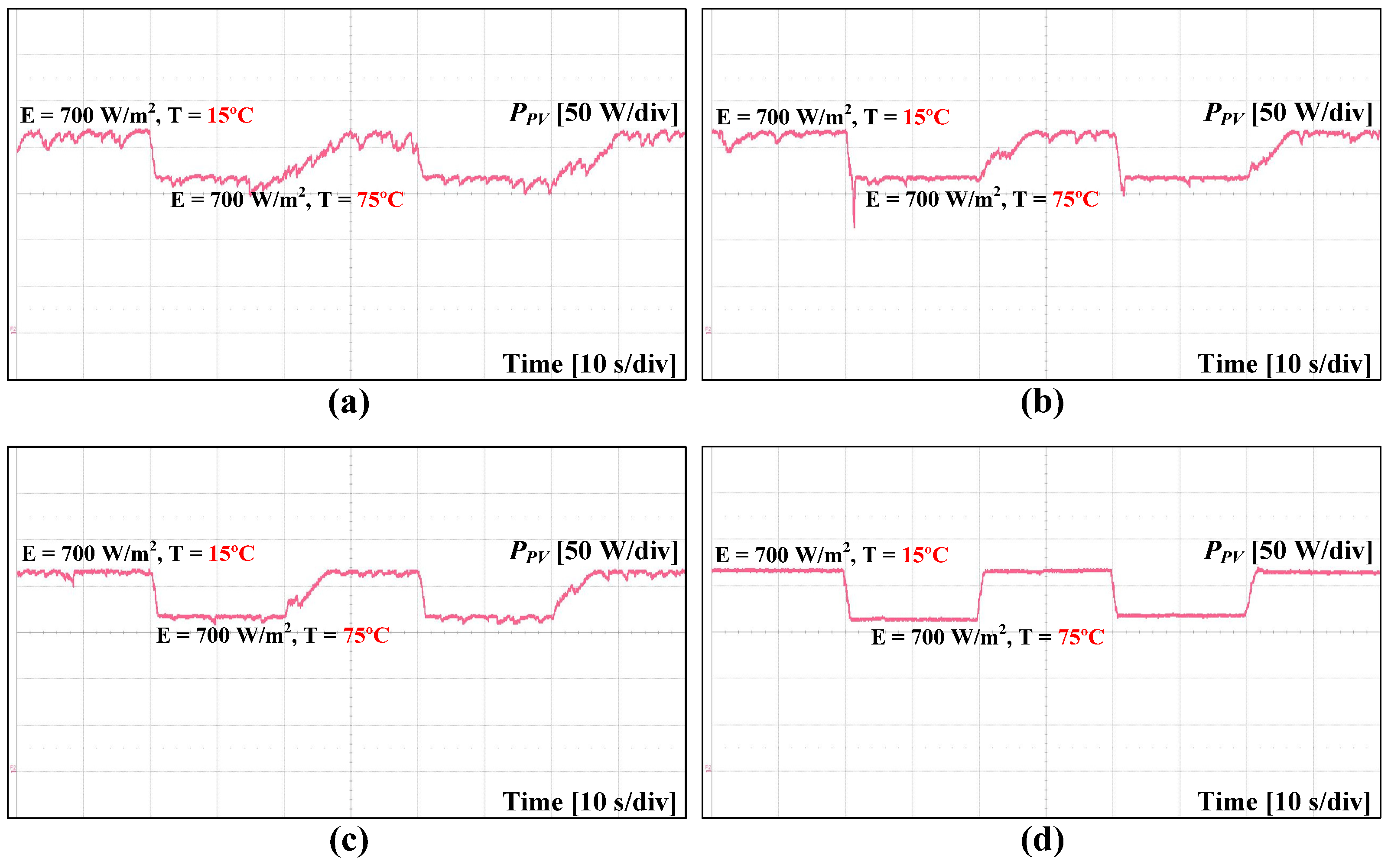
3.1. Experimental Results
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Malinowski, M.; Leon, J.I.; Abu-Rub, H. Solar photovoltaic and thermal energy systems: Current technology and future trends. Proc. IEEE 2017, 105, 2132–2146. [Google Scholar] [CrossRef]
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.M.; Hannegan, B. Achieving a 100% renewable grid: Operating electric power systems with extremely high levels of variable renewable energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- García-Rodríguez, L. Renewable Energy Applications in Desalination: State of the Art. Sol. Energy 2003, 75, 381–393. [Google Scholar] [CrossRef]
- Renewables 2019 Global Status Report, Renewable Energy Policy Network for the 21st Century (REN21). 2019. Available online: https://www.ren21.net/gsr-2019/ (accessed on 2 September 2019).
- Romero-Cadaval, E.; Francois, B.; Malinowski, M.; Zhong, Q.C. Grid-connected photovoltaic plants: An alternative energy source, replacing conventional sources. IEEE Ind. Electron. Mag. 2015, 9, 18–32. [Google Scholar] [CrossRef]
- Zhao, P.; Suryanarayanan, S.; Simoes, M.G. An energy management system for building structures using a multi-agent decision-making control methodology. IEEE Trans. Ind. Appl. 2013, 49, 322–330. [Google Scholar] [CrossRef]
- Strunz, K.; Abbasi, E.; Huu, D.N. DC microgrid for wind and solar power integration. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 115–126. [Google Scholar] [CrossRef]
- Feldman, D.; Barbose, G.; Margolis, R.; Bolinger, M.; Chung, D.; Fu, R.; Seel, J.; Davidson, C.; Darghouth, N.; Wiser, R. Photovoltaic System Pricing Trends Historical, Recent, and Near-Term Projections 2015 Edition. Available online: https://escholarship.org/content/qt9pc3x32t/qt9pc3x32t.pdf (accessed on 2 September 2019).
- Zsiborács, H.; Hegedűsné Baranyai, N.; Csányi, S.; Vincze, A.; Pintér, G. Economic Analysis of Grid-Connected PV System Regulations: A Hungarian Case Study. Electronics 2019, 8, 149. [Google Scholar] [CrossRef]
- Camera, F.L. Renewable Power Generation Costs in 2018; International Renewable Energy Agency (IRENA): Abu Dhabi, UAE, 2019; Available online: https://www.irena.org/publications/2019/May/Renewable-power-generation-costs-in-2018 (accessed on 2 September 2019).
- Meza, C.; Negroni, J.J.; Biel, D.; Guinjoan, F. Energy-balance modeling and discrete control for single-phase grid-connected PV central inverters. IEEE Trans. Ind. Electron. 2008, 55, 2734–2743. [Google Scholar] [CrossRef]
- Flicker, J.; Tamizhmani, G.; Moorthy, M.K.; Thiagarajan, R.; Ayyanar, R. Accelerated testing of module-level power electronics for longterm reliability. IEEE J. Photovolt. 2017, 7, 259–267. [Google Scholar] [CrossRef]
- Liu, Y.H.; Chen, J.H.; Huang, J.W. A review of maximum power point tracking techniques for use in partially shaded conditions. Renew. Sustain. Energy Rev. 2015, 41, 436–453. [Google Scholar] [CrossRef]
- Gu, B.; Dominic, J.; Lai, J.S.; Zhao, Z.; Liu, C. High boost ratio hybrid transformer DC-DC converter for photovoltaic module applications. IEEE Trans. Power Electron. 2013, 28, 2048–2058. [Google Scholar] [CrossRef]
- Sinapis, K.; Tzikas, C.; Litjens, G.; Van den Donker, M.; Folkerts, W.; Van Sark, W.G.J.H.M.; Smets, A. A comprehensive study on partial shading response of c-Si modules and yield modeling of string inverter and module level power electronics. Sol. Energy 2016, 135, 731–741. [Google Scholar] [CrossRef]
- Aganza-Torres, A.; Cardenas, V.; Pacas, M.; Gonzales, M. An efficiency comparative analysis of isolated multi-source grid-connected PV generation systems based on a HF-link micro-inverter approach. Sol. Energy 2016, 127, 239–249. [Google Scholar] [CrossRef]
- Luo, H.; Wen, H.; Li, X.; Jiang, L.; Hu, Y. Synchronous buck converter based low-cost and high-efficiency sub-module DMPPT PV system under partial shading conditions. Energy Convers. Manag. 2016, 126, 473–487. [Google Scholar] [CrossRef]
- Femia, N.; Lisi, G.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Distributed maximum power point tracking of photovoltaic arrays: Novel approach and system analysis. IEEE Trans. Ind. Electron. 2008, 55, 2610–2621. [Google Scholar] [CrossRef]
- Wang, F.; Fang, Z.; Lee, F.C.; Zhu, T.; Yi, H. Analysis of existence-judging criteria for optimal power regions in DMPPT PV systems. IEEE Trans. Energy Convers. 2016, 31, 1433–1441. [Google Scholar] [CrossRef]
- Ahmed, A.; Ran, L.; Bumby, J. Perturbation parameters design for hill climbing MPPT techniques. In Proceedings of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012. [Google Scholar] [CrossRef]
- Hua, C.; Lin, J.; Shen, C. Implementation of a DSP-controlled photovoltaic system with peak power tracking. IEEE Trans. Ind. Electron. 1998, 45, 99–107. [Google Scholar] [CrossRef]
- Veerachary, M.; Senjyu, T.; Uezato, K. Voltage-based maximum power point tracking control of PV system. IEEE Trans. Aerosp. Eelctron. Syst. 2002, 38, 262–270. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G. A modified adaptive hill climbing MPPT method for photovoltaic power systems. In Proceedings of the IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, H.; Zhang, H.; Zhang, P.; Wang, F.; Jia, H.; Song, D. A variable step-size P&O method in the application of MPPT control for a PV system. In Proceedings of the IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar] [CrossRef]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. High-performance algorithms for drift avoidance and fast tracking in solar MPPT system. IEEE Trans. Energy Convers. 2008, 23, 681–689. [Google Scholar] [CrossRef]
- Aashoor, F.A.O.; Robinson, F.V.P. A Variable Step Size Perturb and Observe Algorithm for Photovoltaic Maximum Power Point Tracking. In Proceedings of the 47th International Universities Power Engineering Conference (UPEC), London, UK, 4–7 September 2012. [Google Scholar] [CrossRef]
- Macaulay, J.; Zhou, Z. A fuzzy logical-based variable step size P&O MPPT algorithm for photovoltaic system. Energies 2018, 11, 1340. [Google Scholar] [CrossRef]
- Chen, Y.T.; Jhang, Y.C.; Liang, R.H. A fuzzy-logic based auto-scaling variable step-size MPPT method for PV systems. Sol. Energy 2016, 126, 53–63. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. Variable step size modified p&o mppt algorithm using ga-based hybrid offline/online pid controller. Renew. Sustain. Energy Rev. 2015, 49, 1247–1260. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Shongwe, S.; Hanif, M. Comparative analysis of different singlediode PV modeling methods. IEEE J. Photovolt. 2015, 5, 938–946. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Actions |
|---|---|
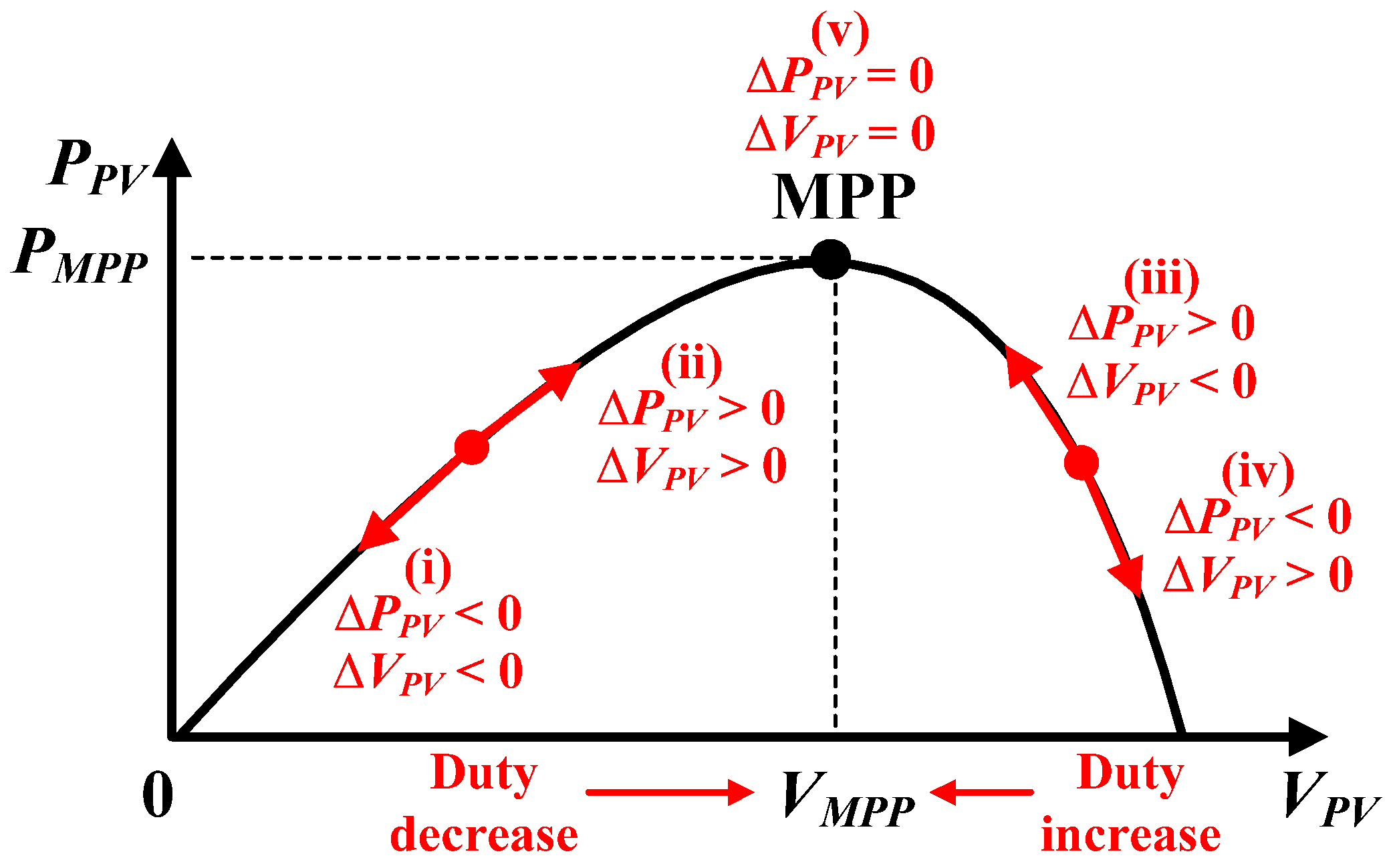
| (i) ΔPPV < 0 and ΔVPV < 0 | Duty decrease |
| (ii) ΔPPV > 0 and ΔVPV > 0 | Duty decrease |
| (iii) ΔPPV > 0 and ΔVPV < 0 | Duty increase |
| (iv) ΔPPV < 0 and ΔVPV > 0 | Duty increase |
| (v) ΔPPV = 0 and ΔVPV = 0 | No action |
| Conditions | Actions |
|---|---|
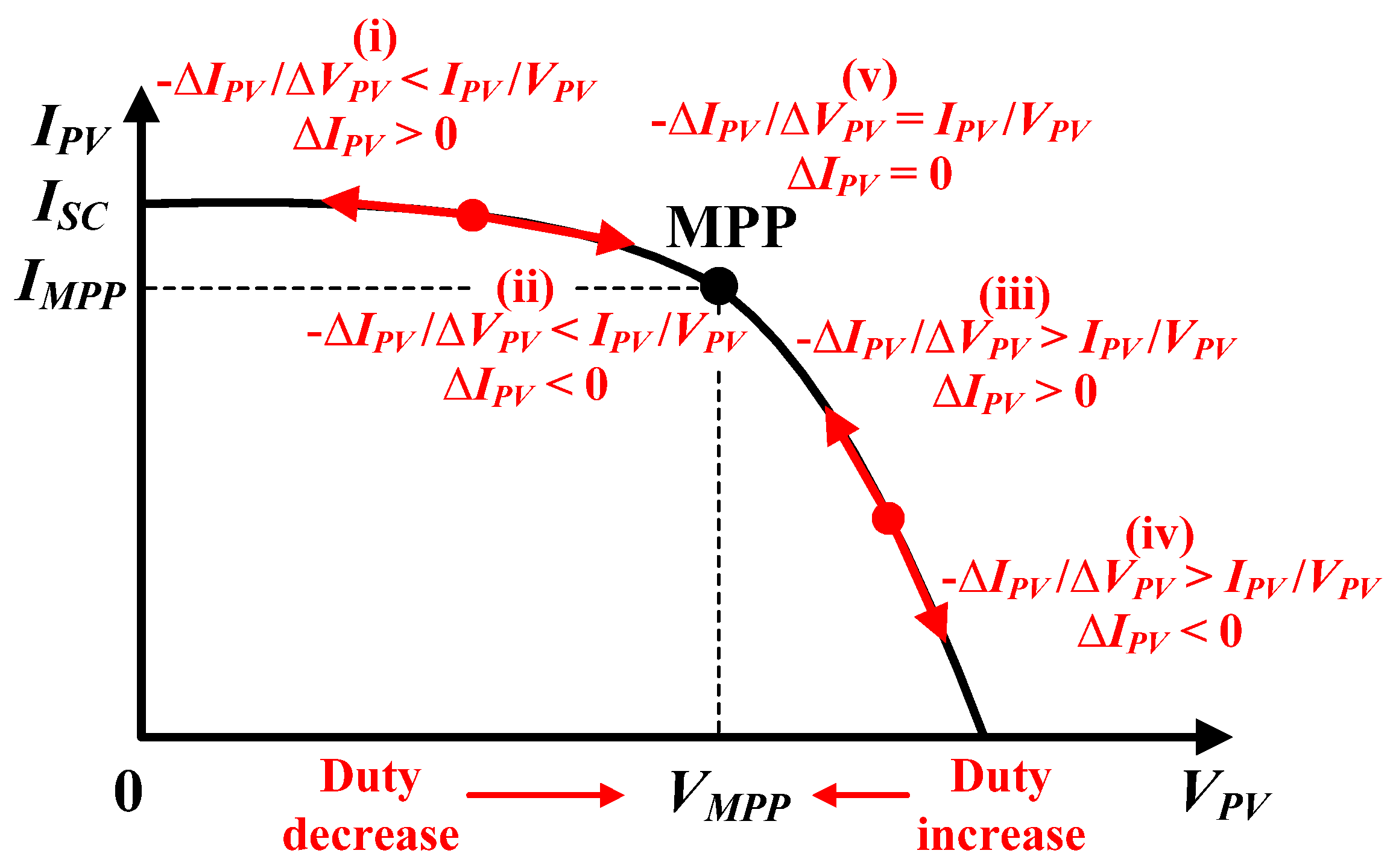
| (i) –ΔIPV/ΔVPV < IPV/VPV and ΔIPV > 0 | Duty decrease |
| (ii) –ΔIPV/ΔVPV < IPV/VPV and ΔIPV < 0 | Duty decrease |
| (iii) –ΔIPV/ΔVPV > IPV/VPV and ΔIPV > 0 | Duty increase |
| (iv) –ΔIPV/ΔVPV > IPV/VPV and ΔIPV < 0 | Duty increase |
| (v) –ΔIPV/ΔVPV = IPV/VPV and ΔIPV = 0 | No action |
| ΔIPV | ΔPPV | ||||
|---|---|---|---|---|---|
| NB | NS | ZO | PS | PB | |
| NB | NB | NS | NS | ZO | ZO |
| NS | NS | ZO | ZO | ZO | PS |
| ZO | ZO | ZO | ZO | PS | PS |
| PS | ZO | PS | PS | PS | PB |
| PB | PS | PS | PB | PB | PB |
| Conditions | Open-Circuit Voltage (VOC) | Short-Circuit Current (ISC) | Voltage at MPP (VMPP) | Current at MPP (IMPP) | Power at MPP (PMPP) |
|---|---|---|---|---|---|
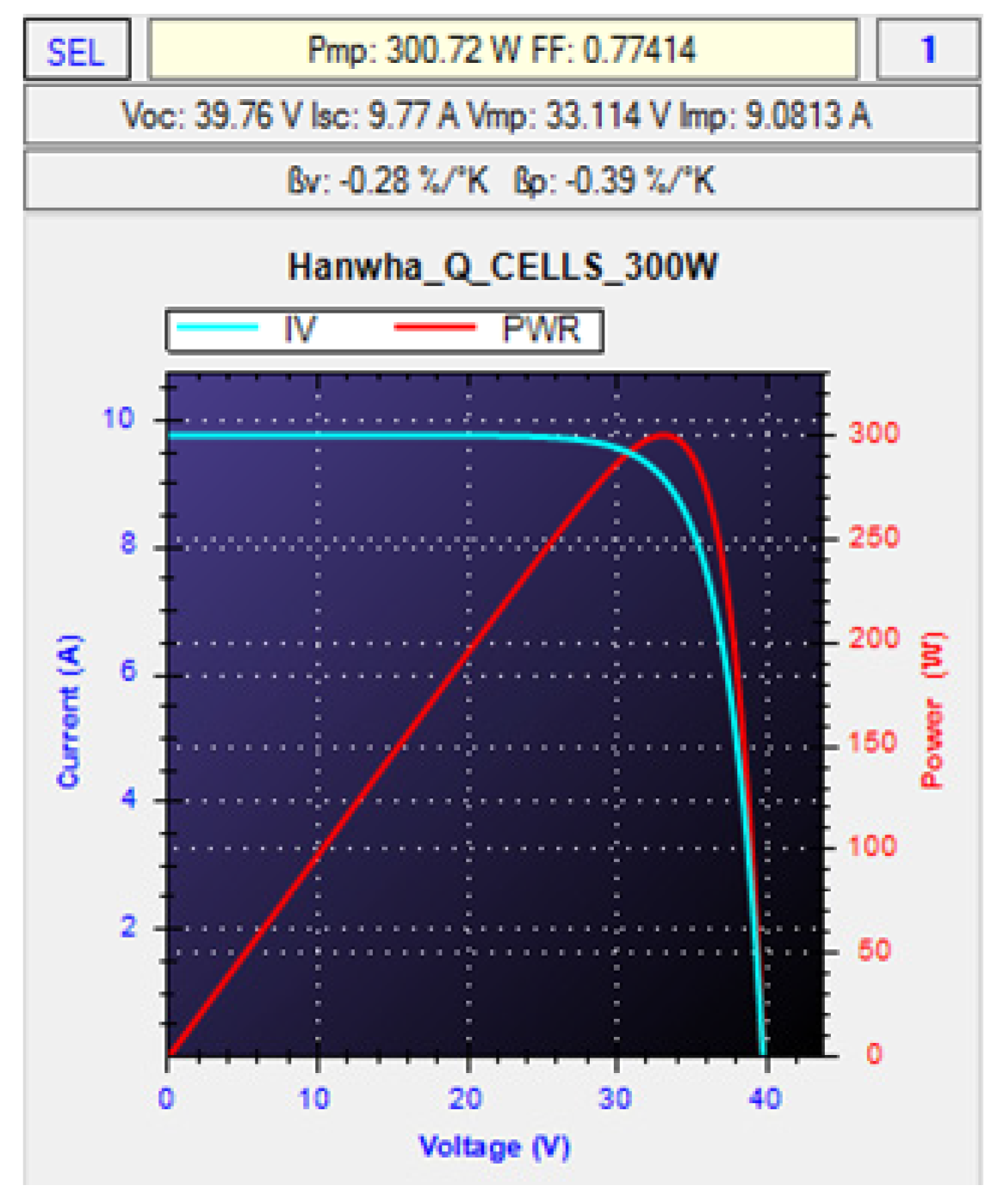
| E = 1000 W/m2 and T = 25 °C | 39.76 V | 9.77 A | 33.11 V | 9.082 A | 300.71 W |
| E = 100 W/m2 and T = 25 °C | 35.78 V | 1.086 A | 29.8 V | 1.009 A | 30.07 W |
| E = 700 W/m2 and T = 15 °C | 40.24 V | 7.021 A | 33.51 V | 6.527 A | 218.72 W |
| E = 700 W/m2 and T = 75 °C | 33.66 V | 6.502 A | 28.04 V | 6.044 A | 169.47 W |
| Performance Parameters | Basic P&O Algorithm of [21] | Adaptive P&O Algorithm of [26] | Adaptive INC Algorithm of [27] | Proposed Algorithm |
|---|---|---|---|---|
| Implementation complexity | simple | medium | medium | medium |
| MPPT method | fixed step size (k2Vstep) in whole operating range | variable step size (k1VstepΔPPV/ΔVPV) in whole operating range | variable step size (k1VstepΔPPV/ΔVPV) in whole operating range | small fixed step size (k2Vstep) near the MPP, variable step size (k1VstepΔPPV/ΔVPV) far from the MPP |
| MPPT efficiency | 97.8% | 98.5% | 98.7% | 99.7% |
| Performance at rapid change of irradiance | poor | medium | medium | good |
| Performance at rapid change of temperature | poor | medium | medium | good |
| Speed | fast | fast | fast | fast |
| Accuracy | low | medium | medium | high |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-S.; Yun, J.-J. Advanced MPPT Algorithm for Distributed Photovoltaic Systems. Energies 2019, 12, 3576. https://doi.org/10.3390/en12183576
Lee H-S, Yun J-J. Advanced MPPT Algorithm for Distributed Photovoltaic Systems. Energies. 2019; 12(18):3576. https://doi.org/10.3390/en12183576
Chicago/Turabian StyleLee, Hyeon-Seok, and Jae-Jung Yun. 2019. "Advanced MPPT Algorithm for Distributed Photovoltaic Systems" Energies 12, no. 18: 3576. https://doi.org/10.3390/en12183576
APA StyleLee, H.-S., & Yun, J.-J. (2019). Advanced MPPT Algorithm for Distributed Photovoltaic Systems. Energies, 12(18), 3576. https://doi.org/10.3390/en12183576