Condition Monitor System for Rotation Machine by CNN with Recurrence Plot



Abstract
1. Introduction
2. Related Works
3. Proposed Study and Framework
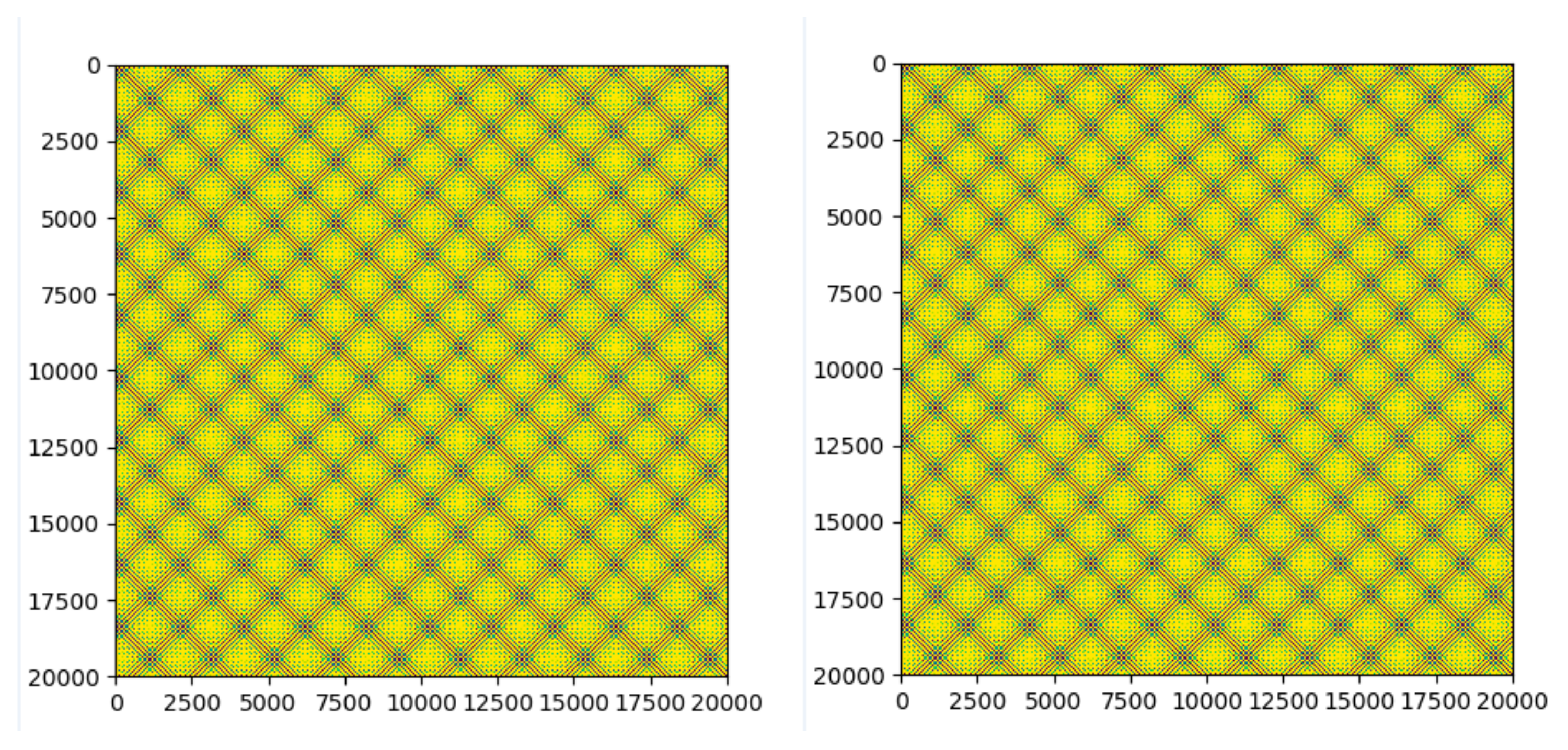
3.1. Time-Series Data to 2D Texture Images
3.2. The Methodology’s Architecture
3.3. Architecture of the Proposed CNN Model
4. Experimental Results and Discussion
4.1. Healthy and Fault Conditioned Motors
- Bearing axis deviation: this condition is considered as class ‘Fault 1’. This happens due to the offset of centers on both sides of coupling when the motor is connected to load.
- Stator and rotor friction: this condition of the motor is considered as ‘Fault 2’. Due to the friction and overheating, the stator or rotor coil is short-circuited and hence it will breakdown if it is not diagnosed and fixed.
- Rotor end ring break: this condition is considered as ‘Fault 3’. Due to the high frequency and overloaded operation of the motor, the excessive current may cause the breaking of the rotor bar.
- Poor insulation: this condition is considered as ‘Fault 4’. This occurs due to the rapid change of the current or voltage.
- Healthy: this condition is considered as ‘Fault 0’ for the classification. Current signal values are collected from the motor working in normal condition.
4.2. Dataset
4.3. Performance Results of the Proposed CNN
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Albrecht, P.; Appiarius, J.; McCoy, R.; Owen, E.; Sharma, D. Assessment of the Reliability of Motors in Utility Applications—Updated. IEEE Trans. Energy Convers. 1986, 39–46. [Google Scholar] [CrossRef]
- Bonnett, A.; Soukup, G. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Dai, X.; Gao, Z. From model signal to knowledge: A data-driven perspective of fault detection and diagnosis. IEEE Trans. Ind. Informat. 2013, 9, 2226–2238. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- He, D.; Li, R.; Zhu, J. Plastic bearing fault diagnosis based on a twostep data mining approach. IEEE Trans. Ind. Electron. 2013, 60, 3429–3440. [Google Scholar]
- Seshadrinath, J.; Singh, B.; Panigrahi, B.K. Vibration Analysis Based Interturn Fault Diagnosis in Induction Machines. IEEE Trans. Ind. Inform. 2014, 10, 340–350. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S. A Survey of Fault Diagnosis and Fault-Tolerant Techniques Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3752–3756. [Google Scholar] [CrossRef]
- Zhang, X. Auxiliary Signal Design in Fault Detection and Diagnosis; Springer: New York, NY, USA, 1989. [Google Scholar]
- Kerestecioglu, F. Change Detection and Input Design in Dynamic Systems; Research Studies Press: Taunton, UK, 1993. [Google Scholar]
- Campbell, S.L.; Nikoukhah, R. Auxiliary Signal Design for Failure Detection; Walter de Gruyter GmbH: Berlin, Germany, 2004. [Google Scholar]
- Scott, J.K.; Findeisen, R.; Braatz, R.D.; Raimondo, D.M. Input design for guaranteed fault diagnosis using zonotopes. Automatica 2014, 50, 1580–1589. [Google Scholar] [CrossRef]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Filho, P.L.; Pederiva, R.; Brito, J. Detection of stator winding faults in induction machines using flux and vibration analysis. Mech. Syst. Signal Process. 2014, 42, 377–387. [Google Scholar] [CrossRef]
- Sun, W.; Chen, J.; Li, J. Decision tree and PCA-based fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2007, 21, 1300–1317. [Google Scholar] [CrossRef]
- Ngaopitakkul, A.; Bunjongjit, S. An application of a discrete wavelet transform and a back-propagation neural network algorithm for fault diagnosis on single-circuit transmission line. Int. J. Syst. Sci. 2013, 44, 1745–1761. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.; Cheng, J. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurements 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Pandya, D.; Upadhyay, S.; Harsha, S. Fault diagnosis of rolling element bearing with intrinsic mode function of acoustic emission data using APF-KNN. Expert Syst. Appl. 2013, 40, 4137–4145. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Qi, Y.; Shen, C.; Wang, D.; Shi, J.; Jiang, X.; Zhu, Z. Stacked Sparse Autoencoder-Based Deep Network for Fault Diagnosis of Rotating Machinery. IEEE Access 2017, 5, 15066–15079. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; De Silva, C.W. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2018, 23, 101–110. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. Syst. 2017, 99, 136–144. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, X.; Niu, M. Rolling bearing fault diagnosis using an optimization deep belief network. Meas. Sci. Technol. 2015, 26, 115002. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Zhao, H. An enhancement deep feature fusion method for rotating machinery fault diagnosis. Knowl. Based Syst. 2017, 119, 200–220. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An Intelligent Fault Diagnosis Method Using Unsupervised Feature Learning Towards Mechanical Big Data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Lee, K.B.; Cheon, S.; Kim, C.O. A Convolutional Neural Network for Fault Classification and Diagnosis in Semiconductor Manufacturing Processes. IEEE Trans. Semicond. Manuf. 2017, 30, 135–142. [Google Scholar] [CrossRef]
- Wang, J.; Liu, P.; She, M.F.; Nahavandi, S.; Kouzani, A. Bag-of-words representation for biomedical time series classification. Biomed. Signal Process. Control 2013, 8, 634–644. [Google Scholar] [CrossRef]
- Hatami, N.; Chira, C.; Hatami, N. Classifiers with a Reject Option for Early Time-Series Classification. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence and Ensemble Learning (CIEL), Singapore, 16–19 April 2013; pp. 9–16. [Google Scholar]
- Wang, Z.; Oates, T. Pooling Sax-Bop Approaches with Boosting to Classify Multivariate Synchronous Physio-Logical Time-Series Data. In Proceedings of the FLAIRS Conference, Hollywood, FL, USA, 18–20 May 2015; pp. 335–341. [Google Scholar]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Eckmann, J.; Kamphorst, S.; Ruelle, D. Recurrence plots of dynamical systems. EPL Euro Phys. Lett. 1987, 4, 17. [Google Scholar]
- Debayle, J.; Hatami, N.; Gavet, Y. Classification of Time-Series Images Using Deep Convolutional Neural Networks. In Proceedings of the Tenth International Conference on Machine Vision (ICMV 2017), Vienna, Austria, 13–15 November 2017. [Google Scholar] [CrossRef]
- Lee, H.; Largman, Y.; Pham, P.; Ng, A. Unsupervised Feature Learning for Audio Classification Using Convolutional Deep Belief Networks. In Proceedings of the Conference on Neural Information Processing Systems (NIPS09), Vancouver, BC, Canada, 7–10 December 2009; pp. 1096–1104. [Google Scholar]
- Zheng, Y.; Liu, Q.; Chen, E.; Ge, Y.; Zhao, J.L. Time Series Classification Using Multi-Channels Deep Convolutional Neural Networks. In Web-Age Information Management; WAIM 2014. Lecture Notes in Computer Science; Li, F., Li, G., Hwang, S., Yao, B., Zhang, Z., Eds.; Springer: Cham, Switzerland, 2014; Volume 8485. [Google Scholar]
- Abdel-Hamid, O.; Deng, L.; Dong, Y. Exploring Convolutional Neural Network Structures and Optimization Techniques for Speech Recognition. In Proceedings of the 14th Annual Conference of the International Speech Communication Association (Interspeech 2013), Lyon, France, 25–29 August 2013. [Google Scholar]
- Wang, Z.; Oates, T. Imaging Time-Series to Improve Classification and Imputation. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), Buenos Aires, Argentina, 25–31 July 2015; pp. 3939–3945. [Google Scholar]
- Wang, Z.; Oates, T. Encoding Time-Series as Images for Visual Inspection and Classification Using Tiled Convolutional Neural Networks. In Proceedings of the Association for the Advancement of Artificial Intelligence (AAAI) Conference, Austin, TX, USA, 25–30 January 2015. [Google Scholar]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Yang, J.; Nguyen, M.; San, P.; Li, X.; Krishnaswamy, S. Deep Convolutional Neural Networks on Multichannel Time-Series for Human Activity Recognition. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), Buenos Aires, Argentina, 25–31 July 2015; pp. 3995–4001. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Conference on Neural Information Processing Systems (NIPS12), Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Xu, B.; Wang, N.; Chen, T.; Li, M. Empirical Evaluation of Rectified Activations in Convolutional Network. arXiv 2015, arXiv:150500853. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:14126980. [Google Scholar]
- Chang, H.; Kuo, C.; Hsueh, Y.; Wang, Y.; Hsieh, C. Fuzzy-Based Fault Diagnosis System for Induction Motors on Smart Grid Structures. In Proceedings of the 2017 IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 14–17 August 2017; pp. 103–109. [Google Scholar]
- Zhang, X.; Liang, Y.; Zhou, J.; Zang, Y. A novel bearing fault diagnosis model integrated permutation entropy, ensemble empirical mode decomposition and optimized SVM. Measurement 2015, 69, 164–179. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer (Type) | Output Shape | Param # |
|---|---|---|
| conv2d_4 (Conv2D) | (None, 1, 64, 32) | 18,464 |
| leaky_re_lu_5 (LeakyReLU) | (None, 1, 64, 32) | 0 |
| max_pooling2d_4 (MaxPooling2) | (None, 1, 32, 32) | 0 |
| conv2d_5 (Conv2D) | (None, 1, 32, 64) | 18,496 |
| leaky_re_lu_6 (LeakyReLU) | (None, 1, 32, 64) | 0 |
| max_pooling2d_5 (MaxPooling2) | (None, 1, 16, 64) | 0 |
| conv2d_6 (Conv2D) | (None, 1, 16, 128) | 73,856 |
| leaky_re_lu_7 (LeakyReLU) | (None, 1, 16, 128) | 0 |
| max_pooling2d_6 (MaxPooling2) | (None, 1, 8, 128) | 0 |
| flatten_2 (Flatten) | (None, 1024) | 0 |
| dense_2 (Dense) | (None, 128) | 131,200 |
| leaky_re_lu_8 (LeakyReLU) | (None, 128) | 0 |
| dense_3 (Dense) | (None, 5) | 645 |
| Fault 0 | Fault 1 | Fault 2 | Fault 3 | Fault 4 | Total |
|---|---|---|---|---|---|
| 150 | 150 | 150 | 150 | 150 | 750 |
| Data Split Ratio | ||
|---|---|---|
| Training | 60% | 450 |
| Validation | 15% | 112 |
| Testing | 25% | 188 |
| Classification Report | ||||
|---|---|---|---|---|
| CLASS | Precision | Recall | F1-Score | Support |
| Fault 0 | 1.00 | 1.00 | 1.00 | 38 |
| Fault 1 | 1.00 | 0.89 | 0.94 | 37 |
| Fault 2 | 0.95 | 1.00 | 0.97 | 38 |
| Fault 3 | 1.00 | 1.00 | 1.00 | 37 |
| Fault 4 | 0.95 | 1.00 | 0.97 | 38 |
| Accuracy | 0.98 | 188 | ||
| Macro avg | 0.98 | 0.98 | 0.98 | 188 |
| Weighted avg | 0.98 | 0.98 | 0.98 | 188 |
| Methods | Accuracy (%) |
|---|---|
| SVM | 88.2 |
| ANN | 87.8 |
| ADCNN | 98.4 |
| Sparse filter | 98.2 |
| DBN | 81.8 |
| Proposed deep CNN | 99.81 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsueh, Y.; Ittangihala, V.R.; Wu, W.-B.; Chang, H.-C.; Kuo, C.-C. Condition Monitor System for Rotation Machine by CNN with Recurrence Plot. Energies 2019, 12, 3221. https://doi.org/10.3390/en12173221
Hsueh Y, Ittangihala VR, Wu W-B, Chang H-C, Kuo C-C. Condition Monitor System for Rotation Machine by CNN with Recurrence Plot. Energies. 2019; 12(17):3221. https://doi.org/10.3390/en12173221
Chicago/Turabian StyleHsueh, Yumin, Veeresha Ramesha Ittangihala, Wei-Bin Wu, Hong-Chan Chang, and Cheng-Chien Kuo. 2019. "Condition Monitor System for Rotation Machine by CNN with Recurrence Plot" Energies 12, no. 17: 3221. https://doi.org/10.3390/en12173221
APA StyleHsueh, Y., Ittangihala, V. R., Wu, W.-B., Chang, H.-C., & Kuo, C.-C. (2019). Condition Monitor System for Rotation Machine by CNN with Recurrence Plot. Energies, 12(17), 3221. https://doi.org/10.3390/en12173221