Evaluation of Accommodation Capability for Electric Vehicles of a Distribution System Considering Coordinated Charging Strategies

 ,
,
Abstract
:
1. Introduction
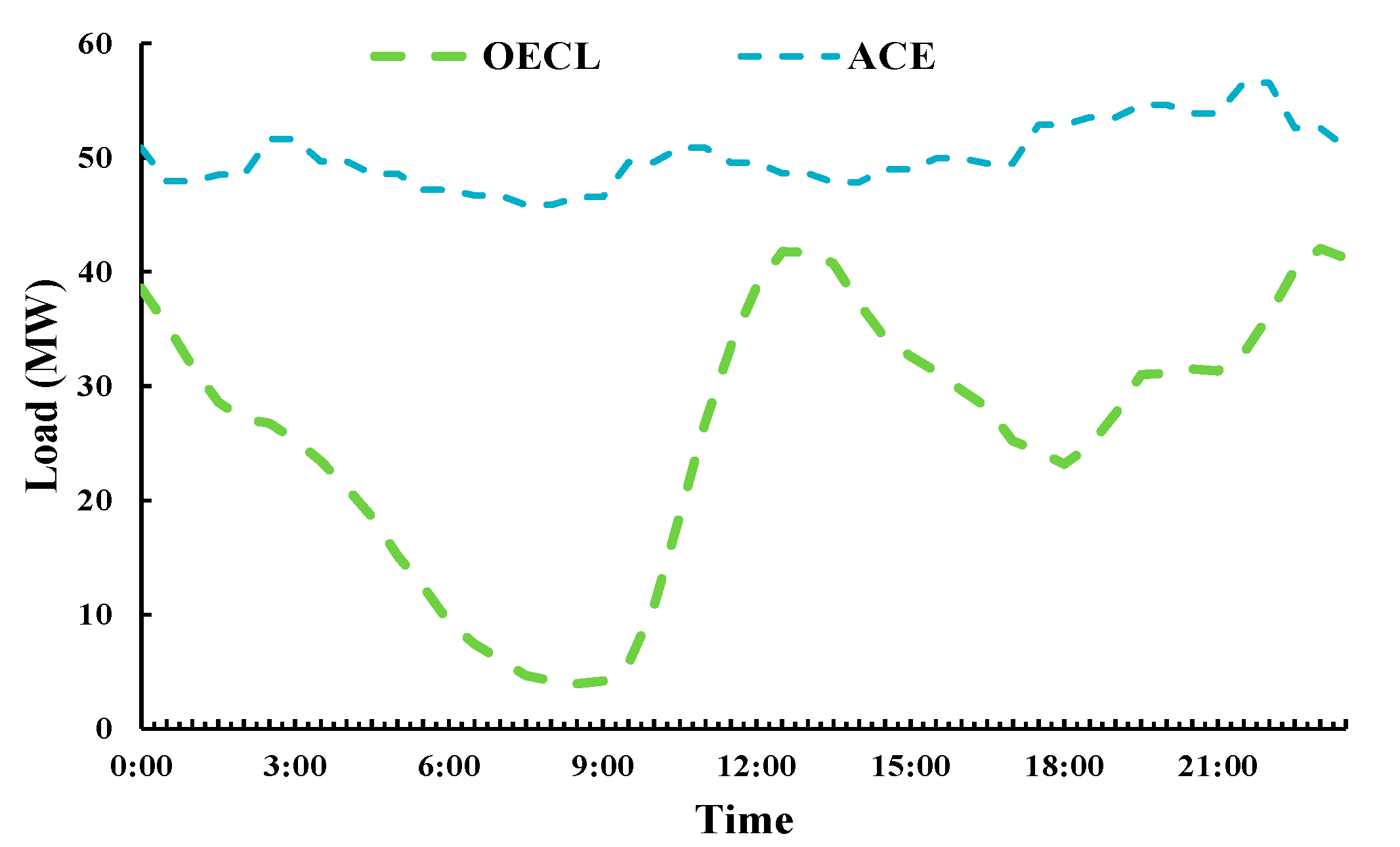
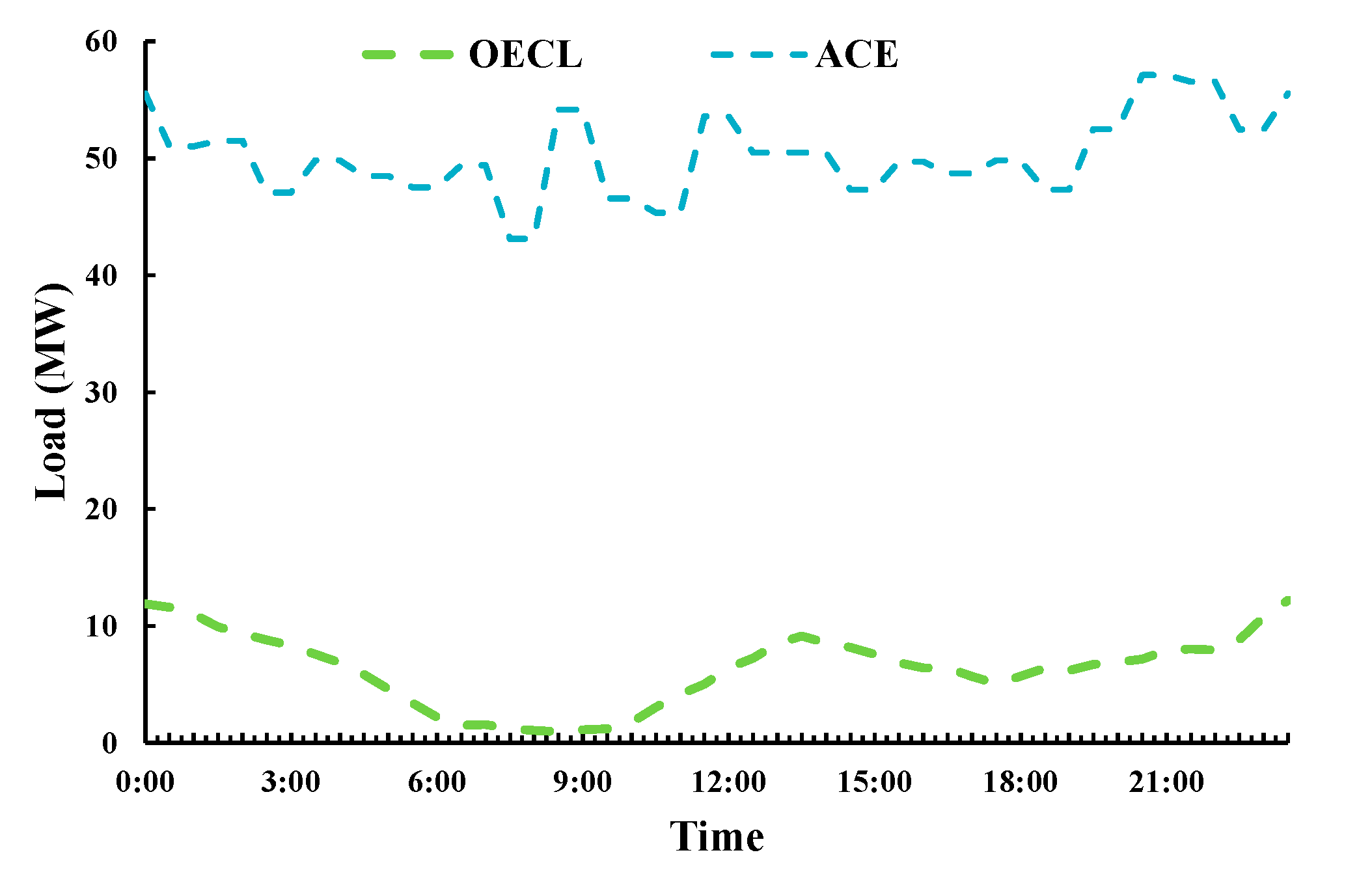
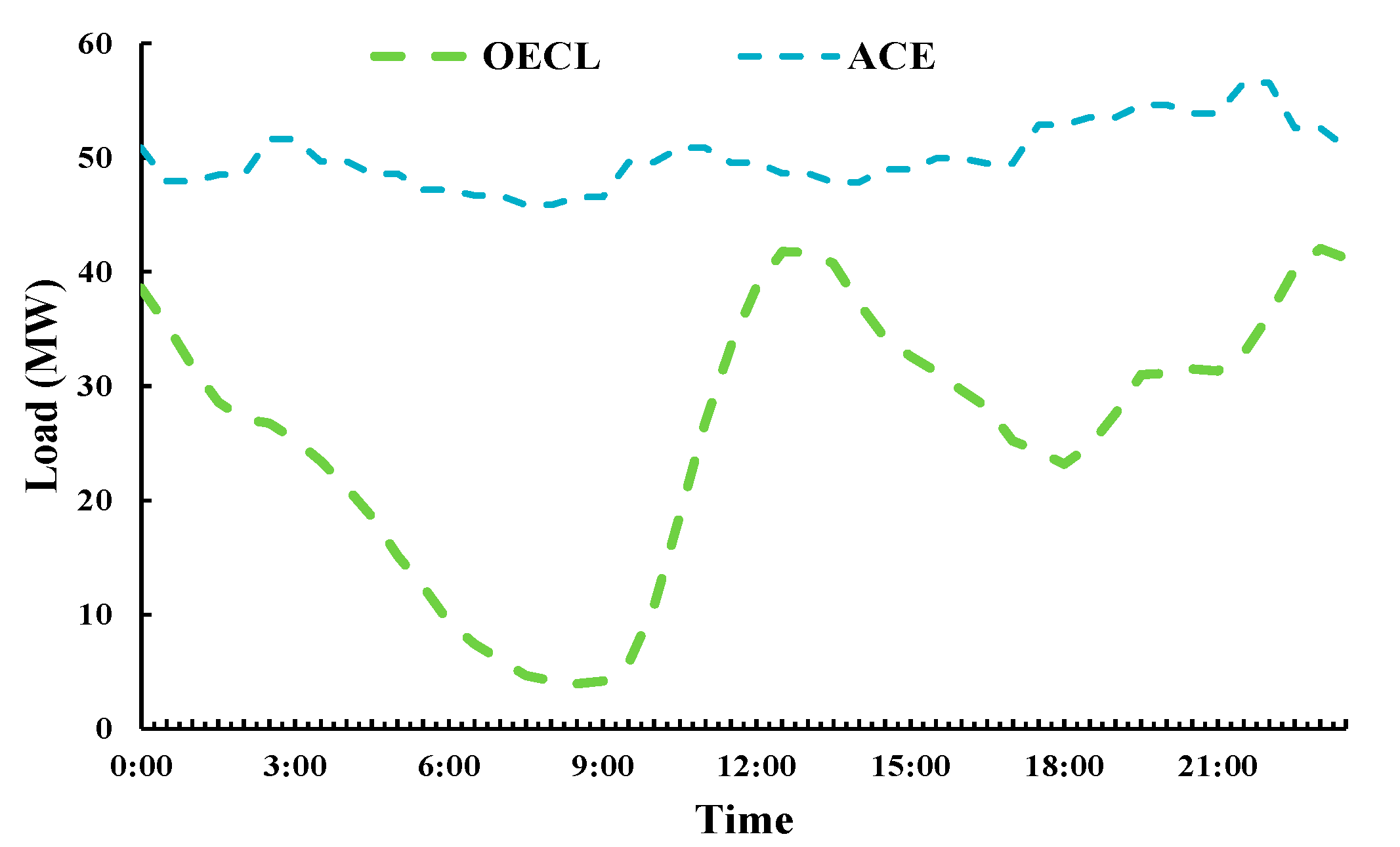
- The ACE and the OECL of a distribution system are comprehensively presented so as to consider the EV accommodation and charging load distribution holistically. Furthermore, EVs are divided into four major categories to discuss the corresponding OECL in detail.
- The proposed co-optimization model considers both the optimal dispatch of flexible resources and the optimal charging scheme for EVs with respect to security constraints, such as power balance, voltage limits and N − 1 security criterion.
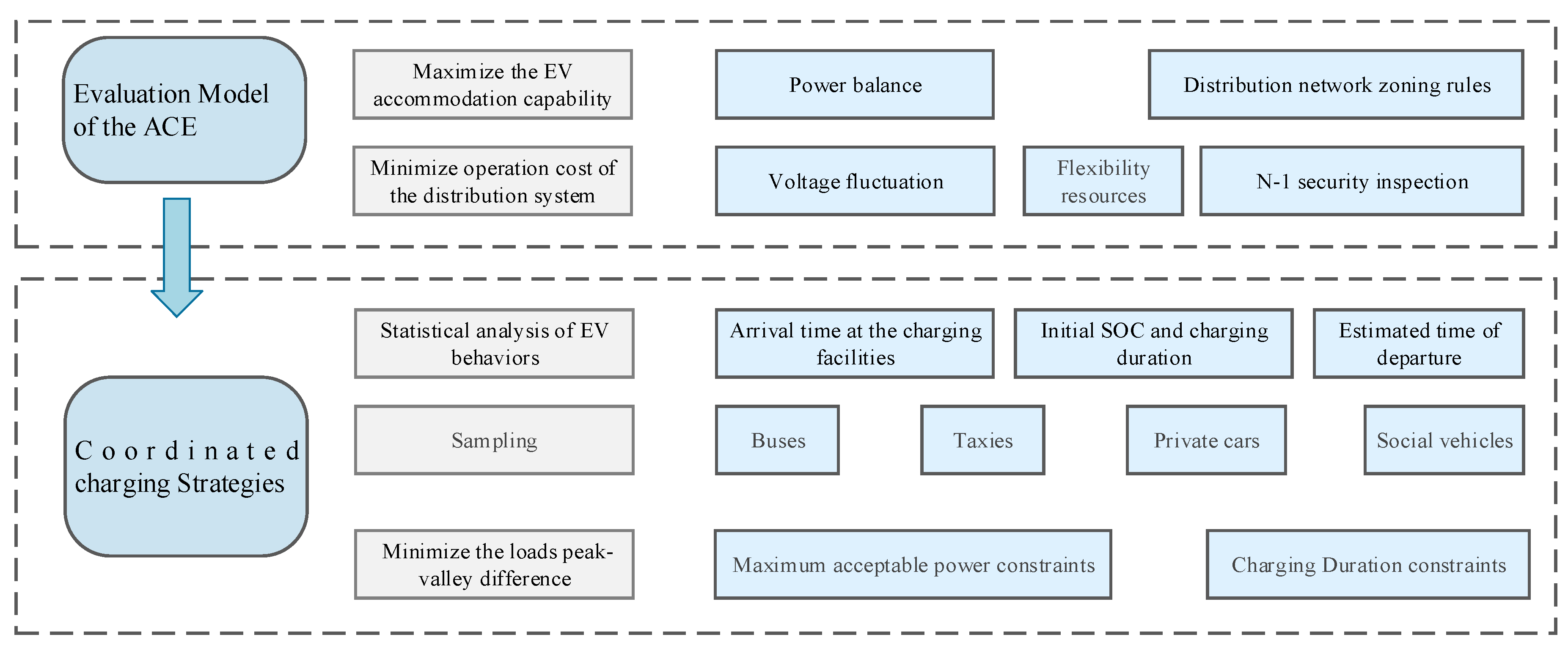
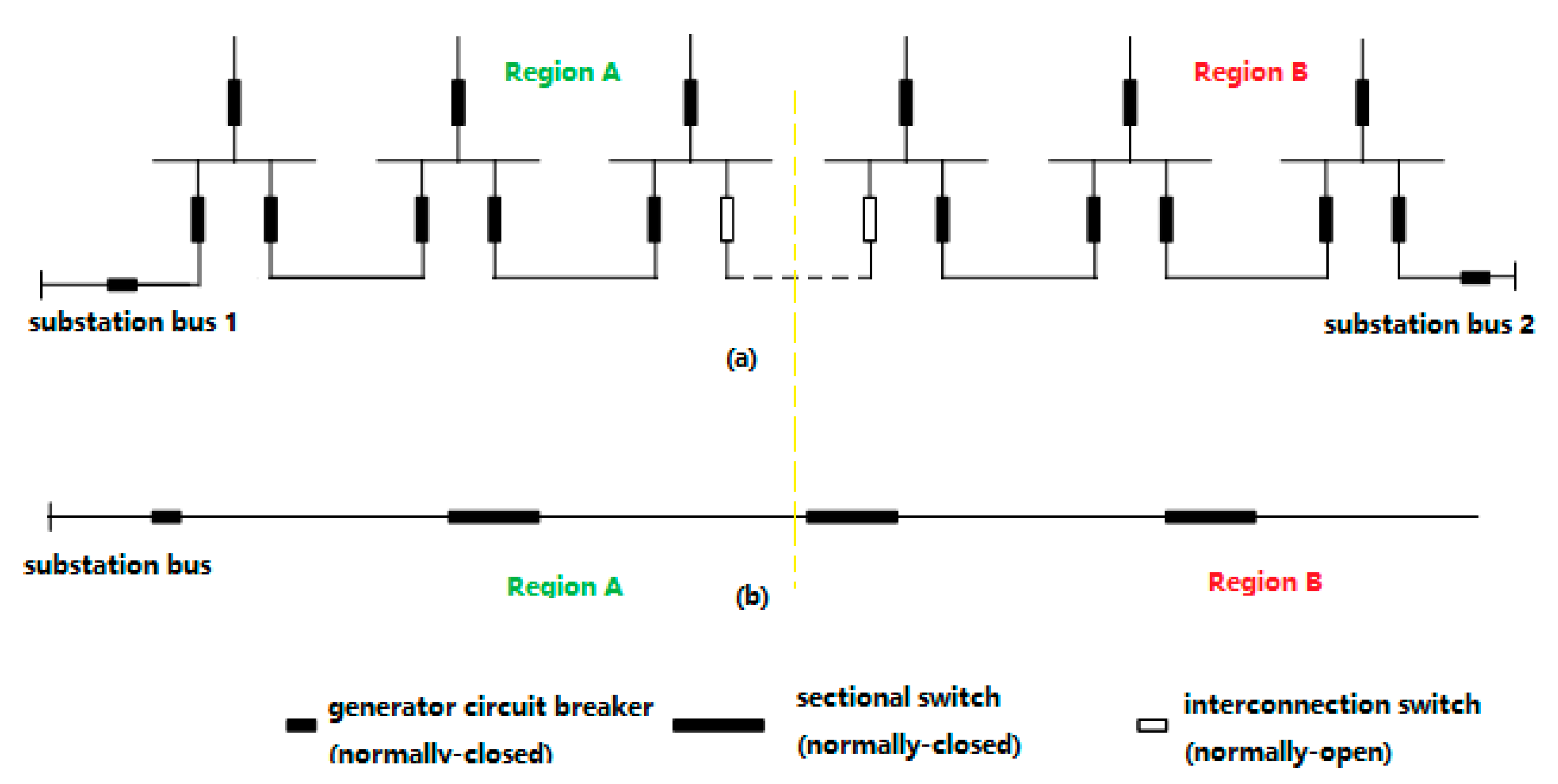
- A data-driven method is proposed to model EV charging behaviors, which is important in coordinating charging schedule. The distribution system is divided into multiple subareas according to its load characteristics. Coordinated charging optimization is performed in each subarea to meet its reliability standard while addressing its load characteristics.
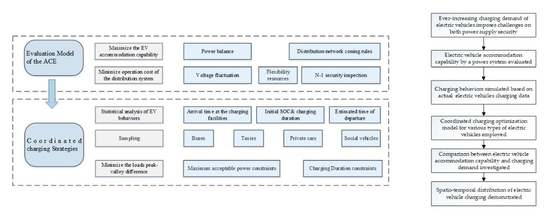
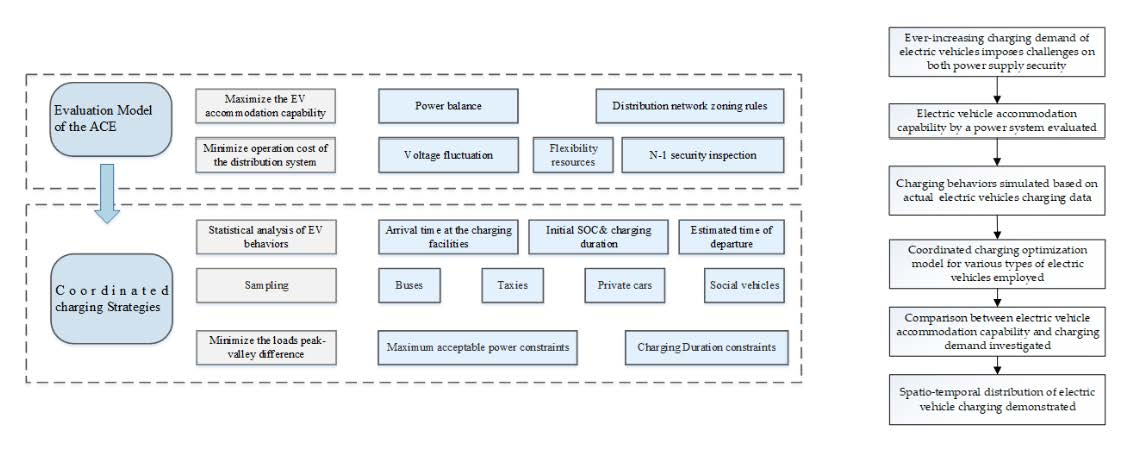
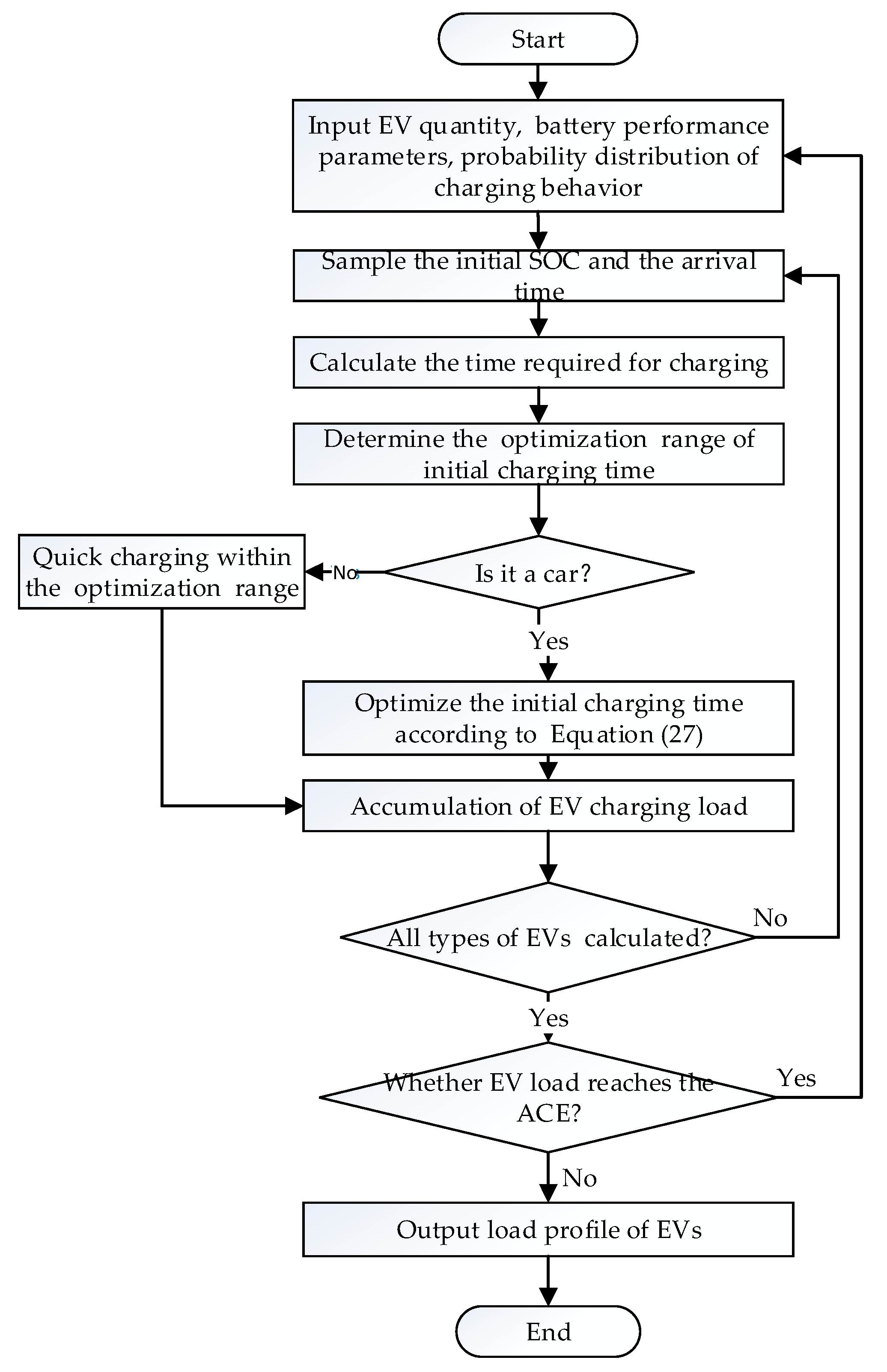
2. Framework of the Model
3. Formulation of the Proposed Model
- All the charging loads of EVs at the charging stations or charging facilities that are connected to one bus are grouped into one load, and the ACE for each bus is evaluated in our model.
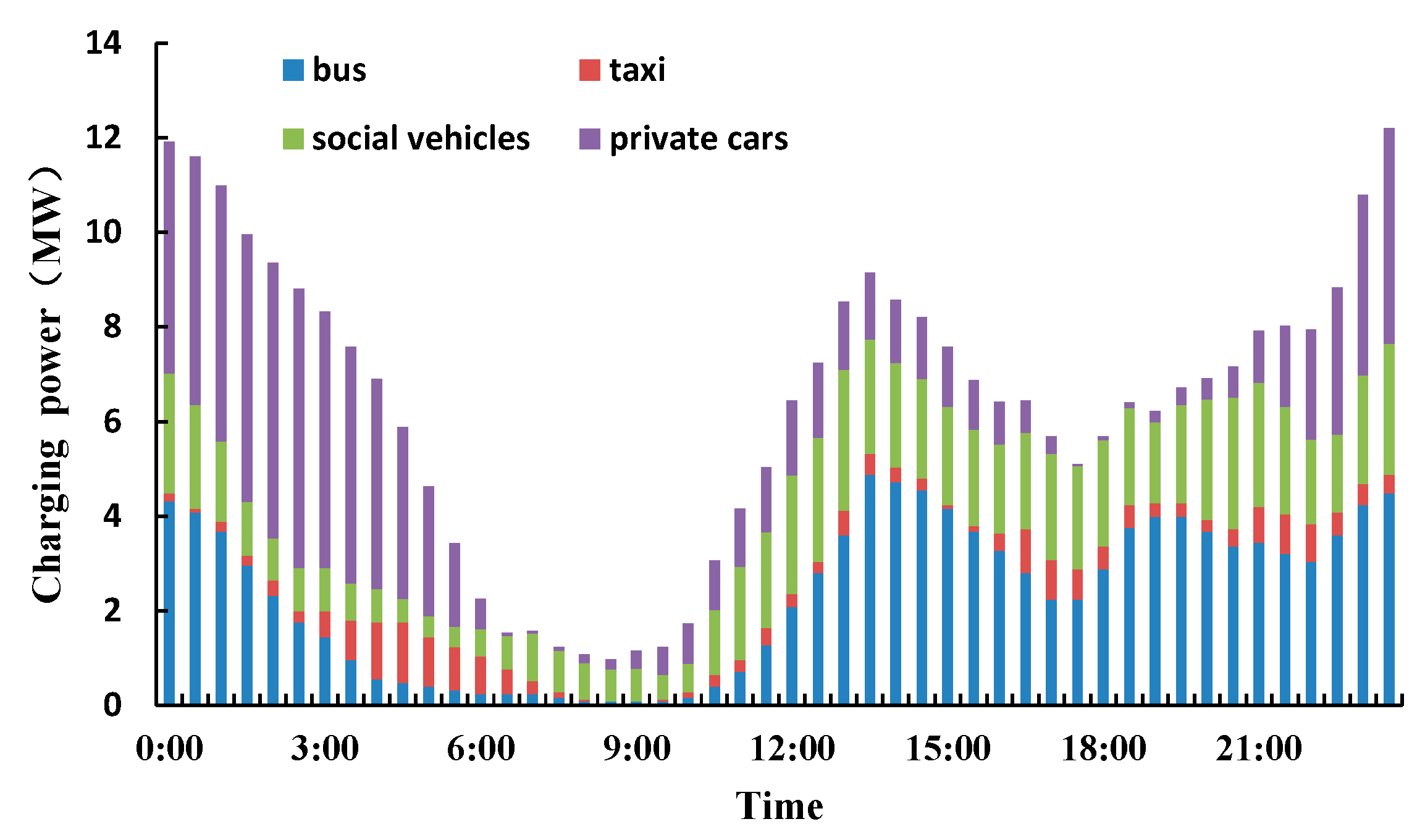
- EVs are divided into the following four categories in this paper: Electric buses, taxies, private cars, and social vehicles (mainly referring to rental cars). Each type of vehicle is affiliated with a corresponding charging rate.
- It is assumed that slow charging piles can interact with distribution system operators in real-time and the operators are capable of controlling the charging power and the duration for each EV once it is plugged into the system.
3.1. Evaluation Model of the ACE in a Distribution System
3.2. The Coordinated Charging Optimization Model
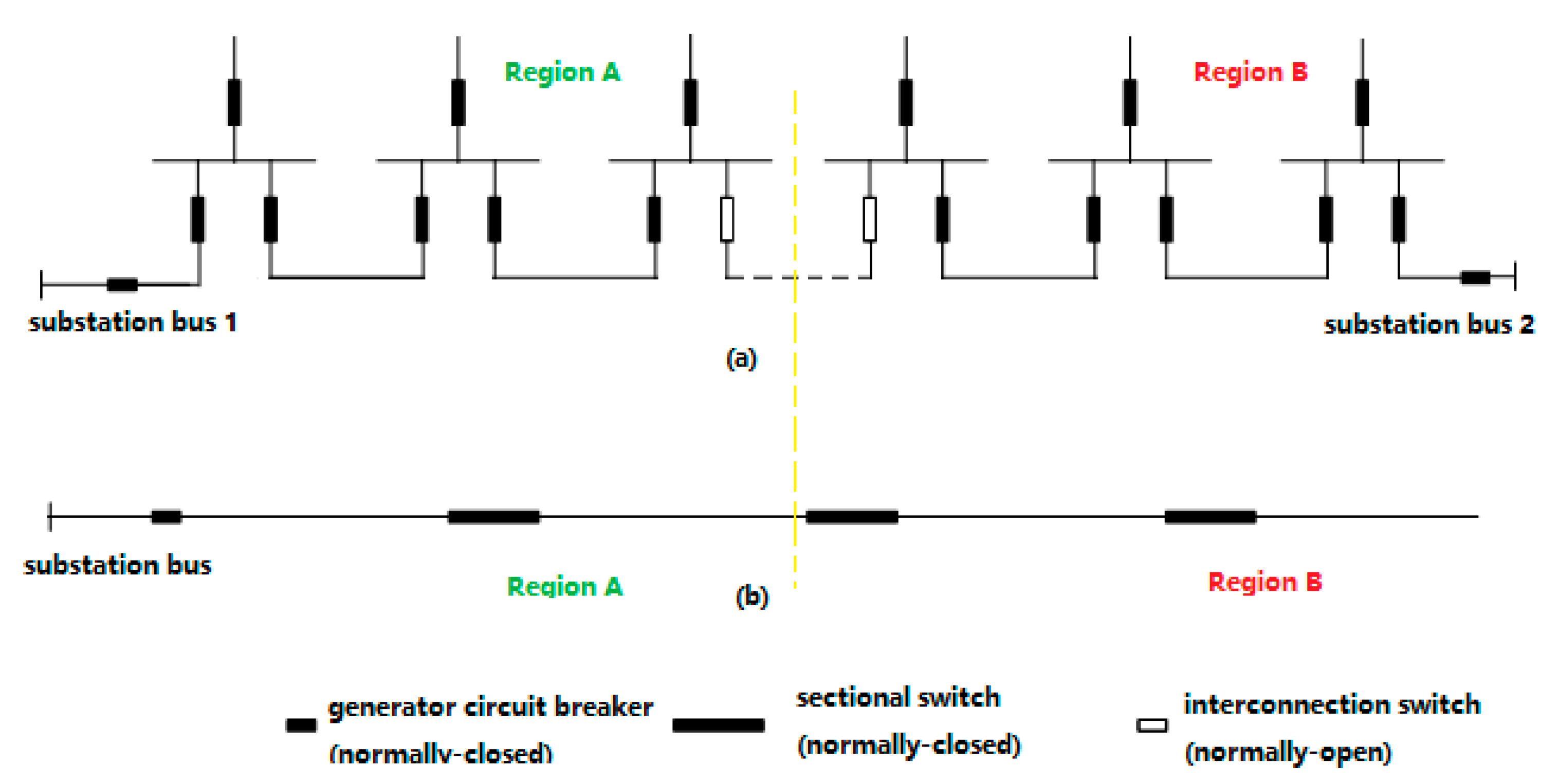
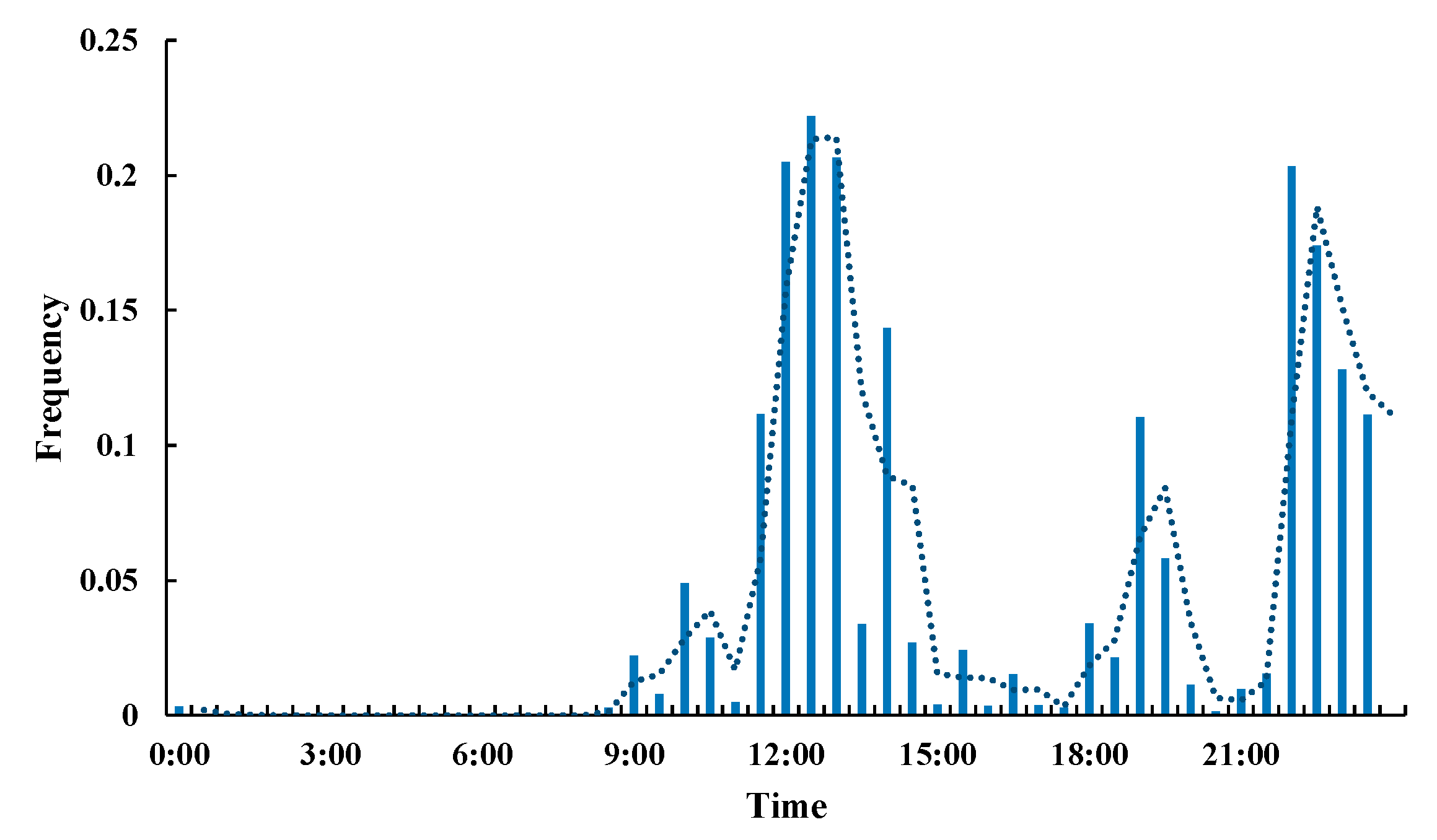
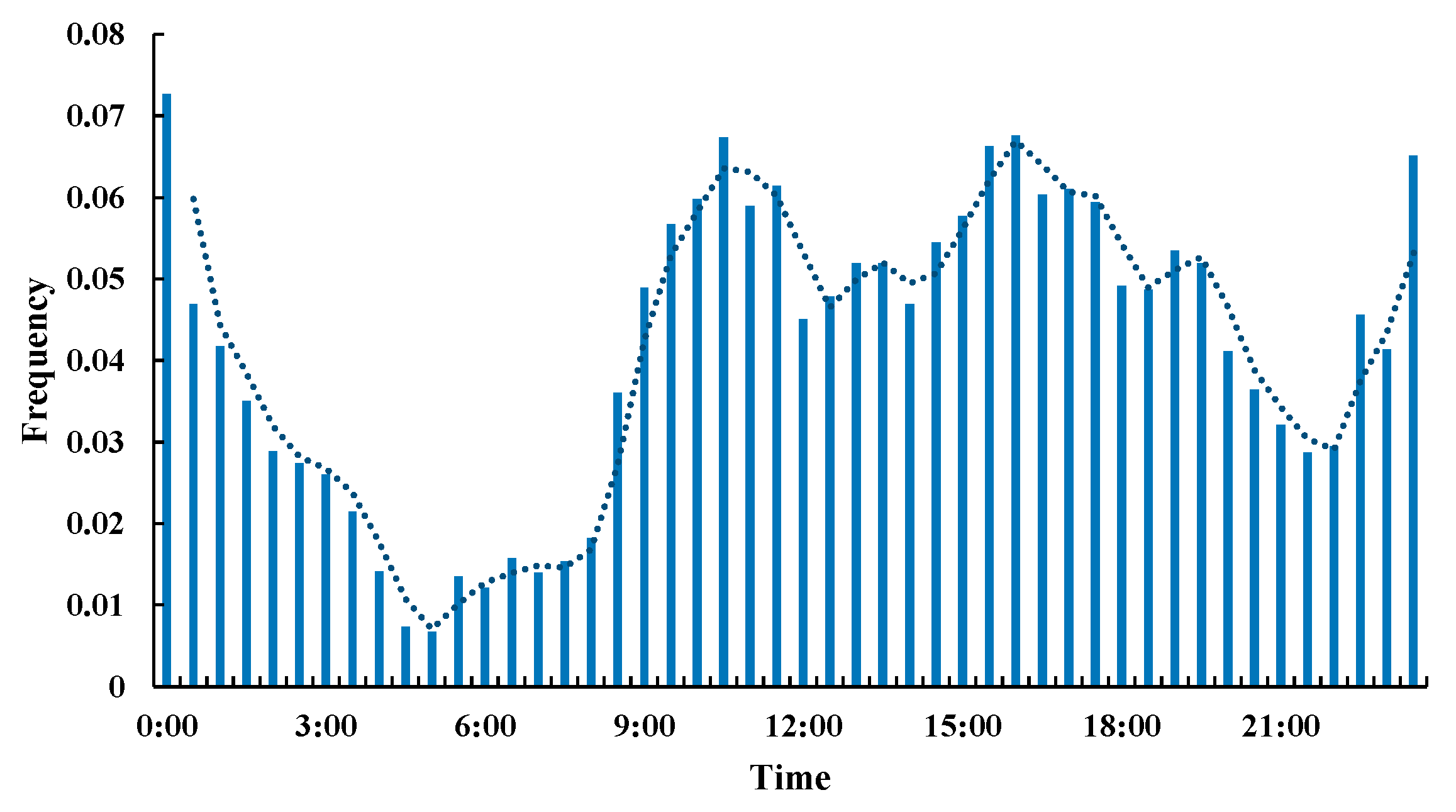
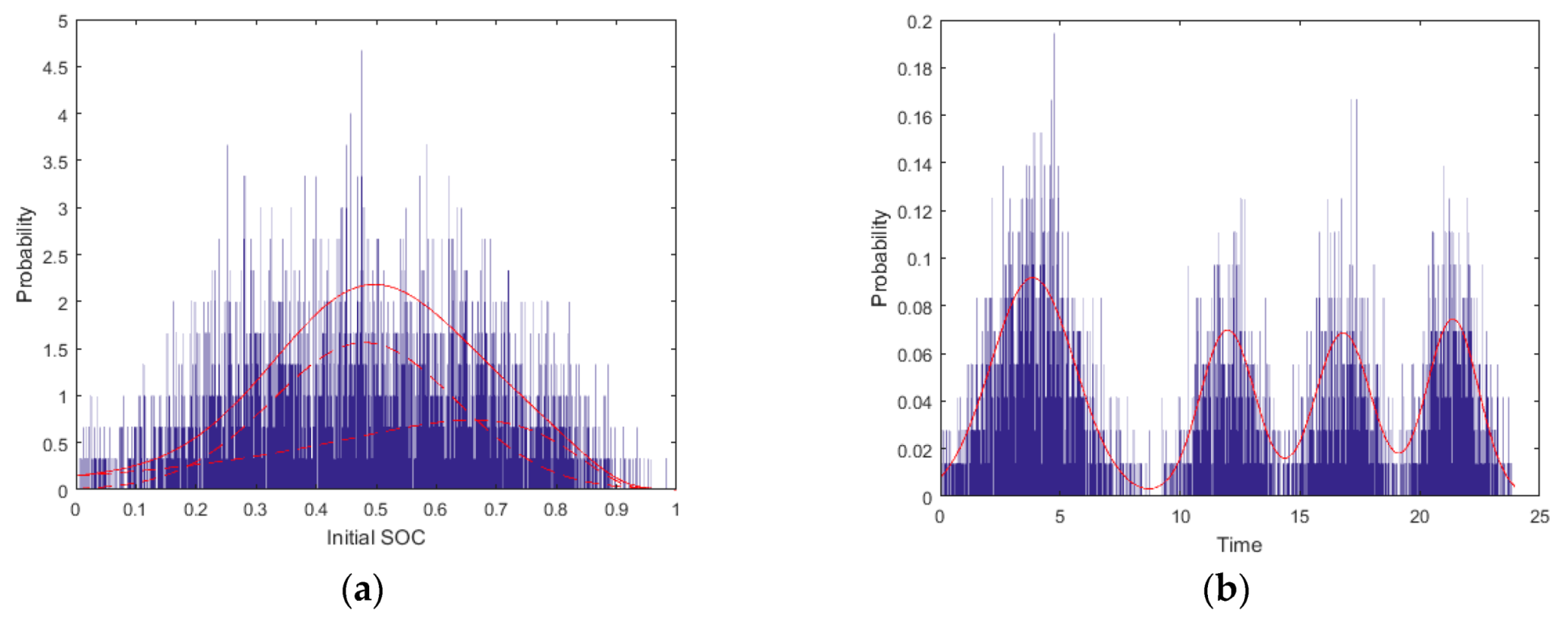
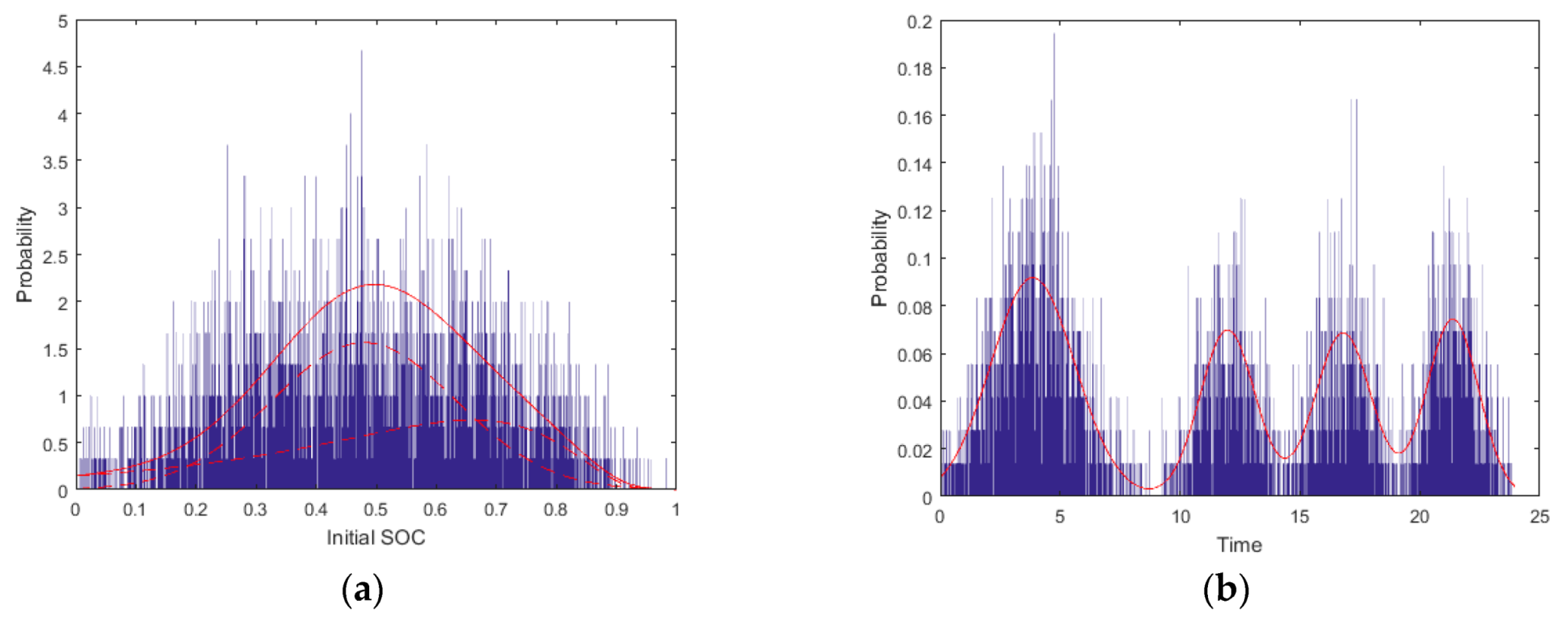
3.2.1. Statistical Analysis
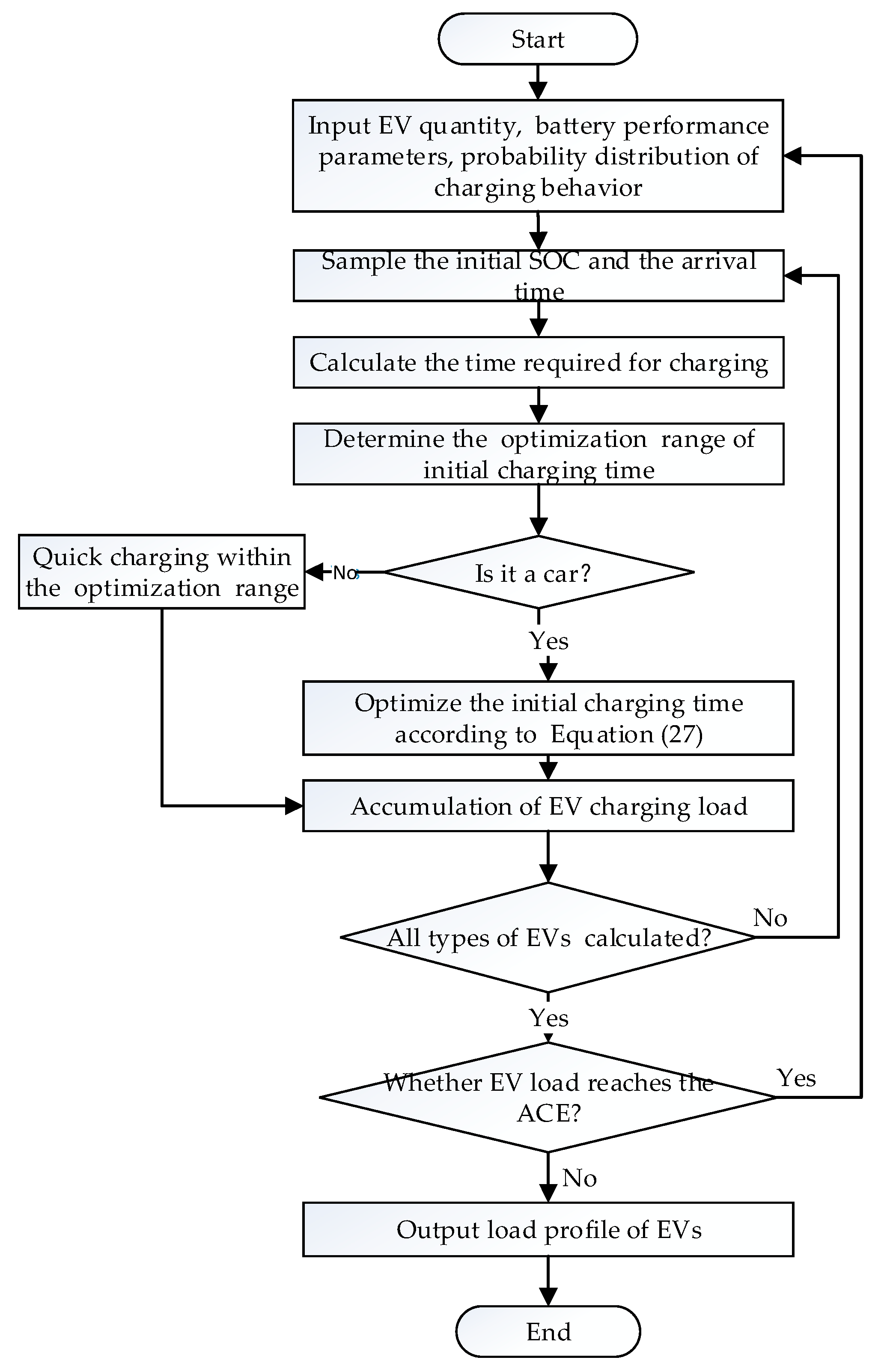
3.2.2. Sampling
3.2.3. Coordinated Charging Optimization
3.3. Relationship between the Two Models
4. Case Studies
4.1. Solving Method
4.2. System Settings
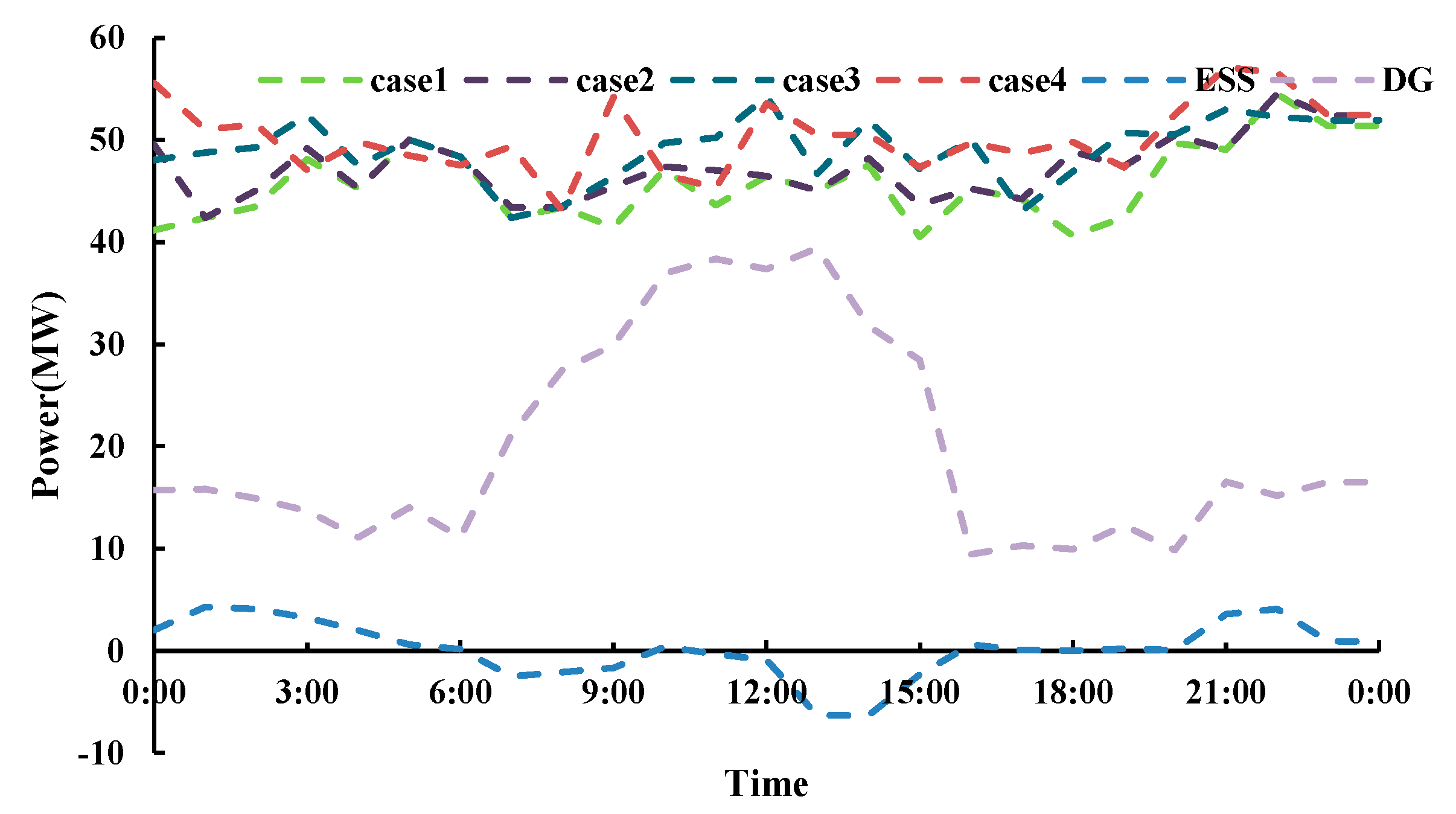
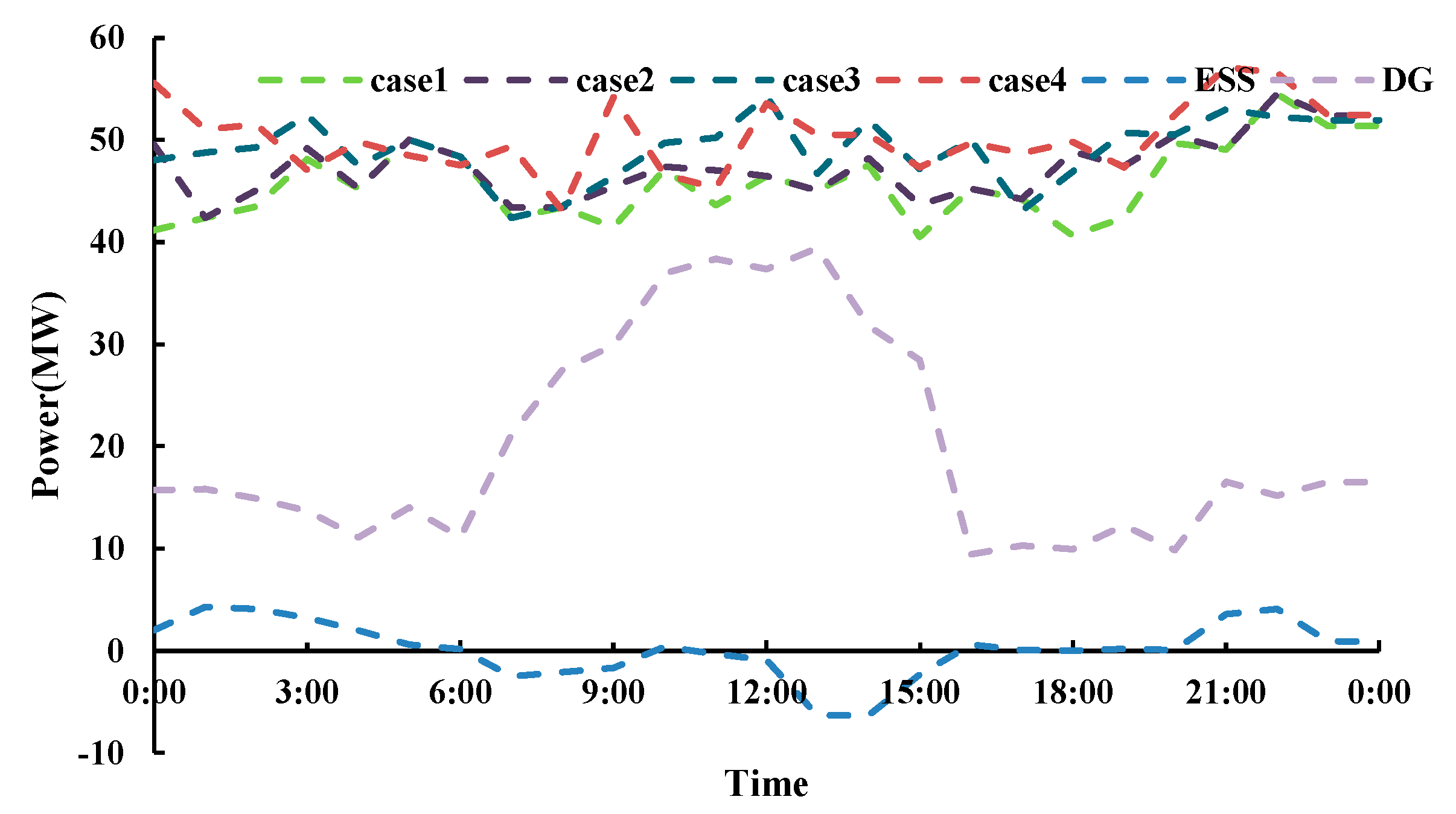
4.3. Comparisons of Results among Multiple Cases
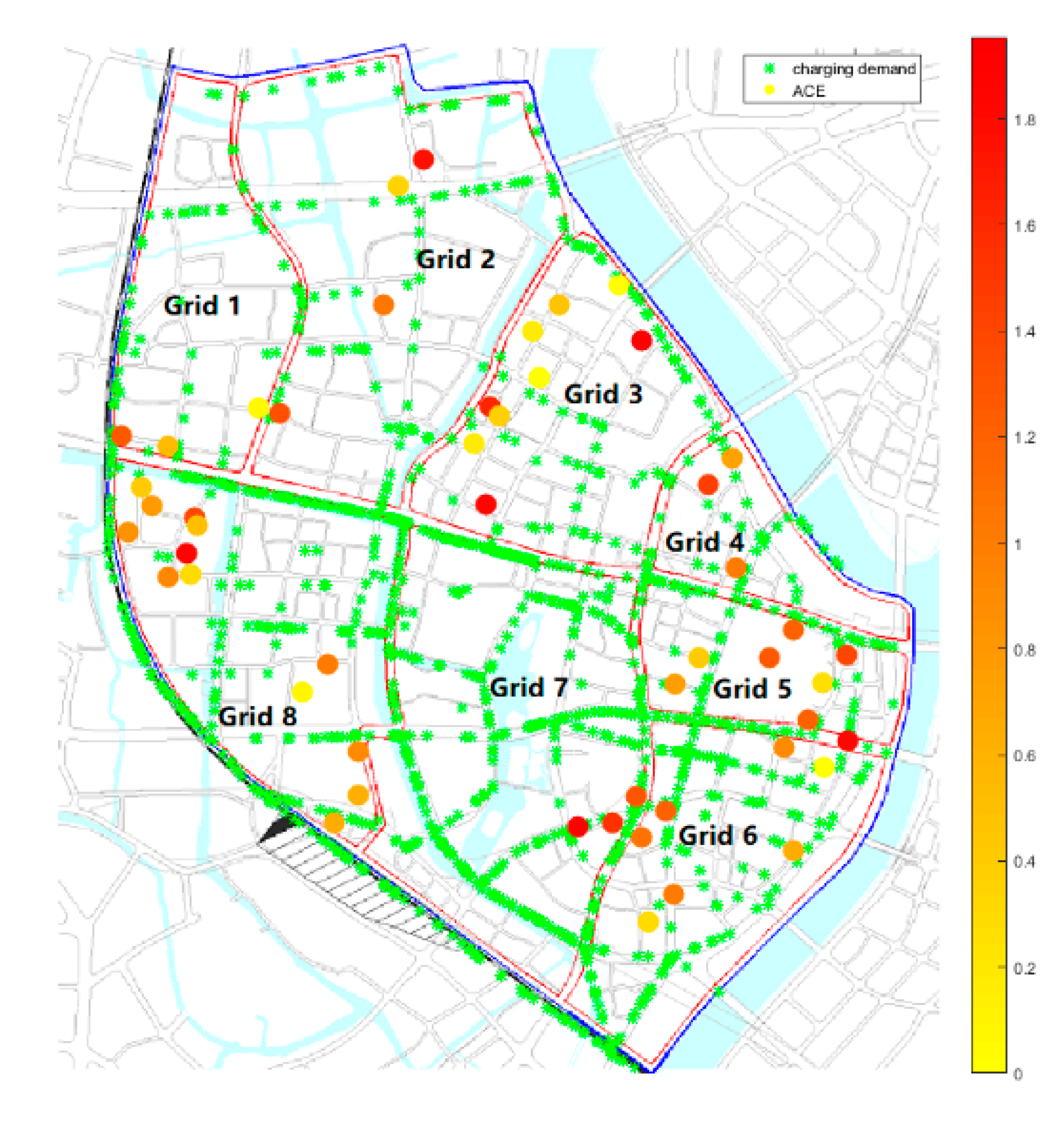
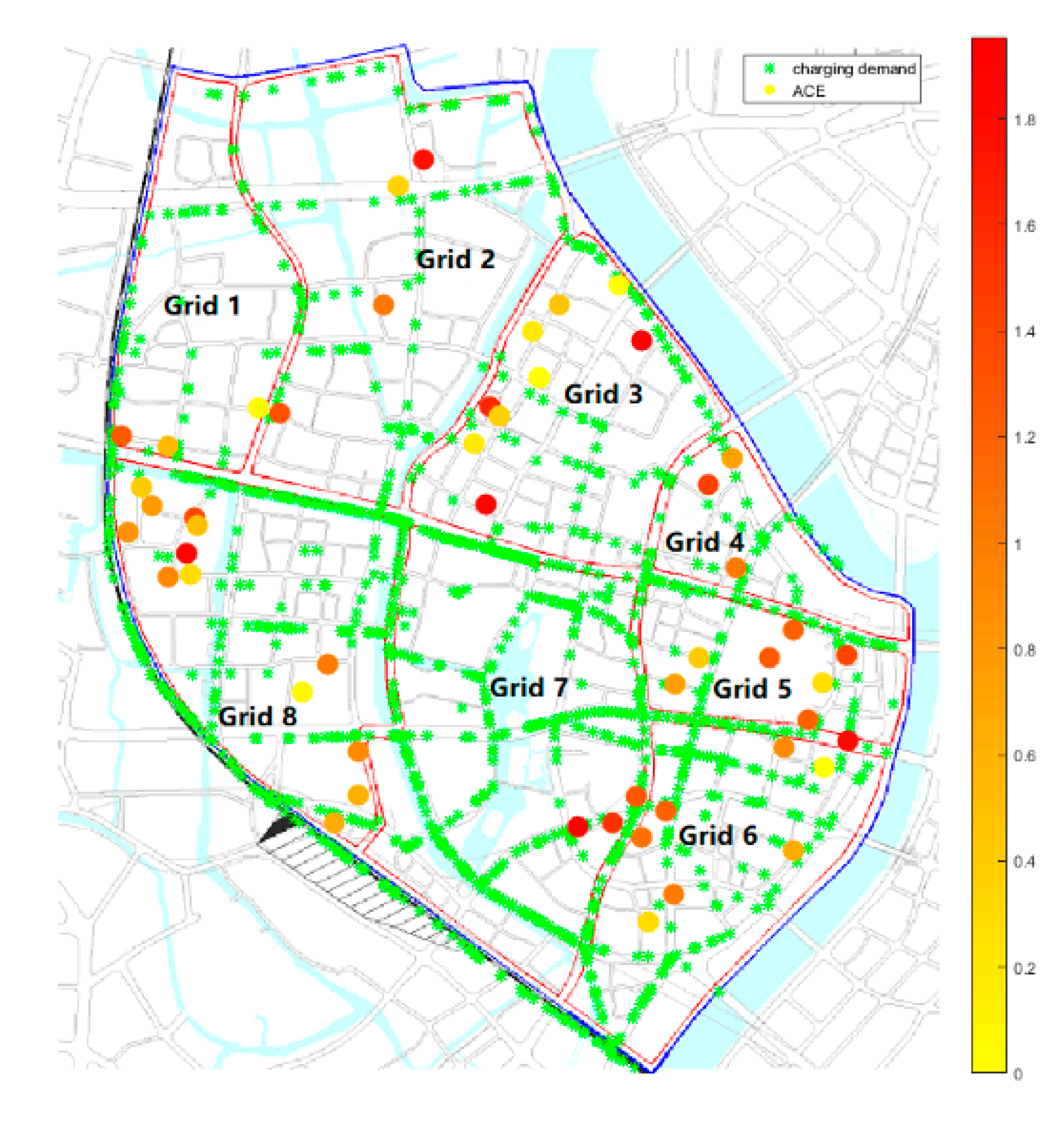
4.4. Spatiotemporal Distribution of the ACE
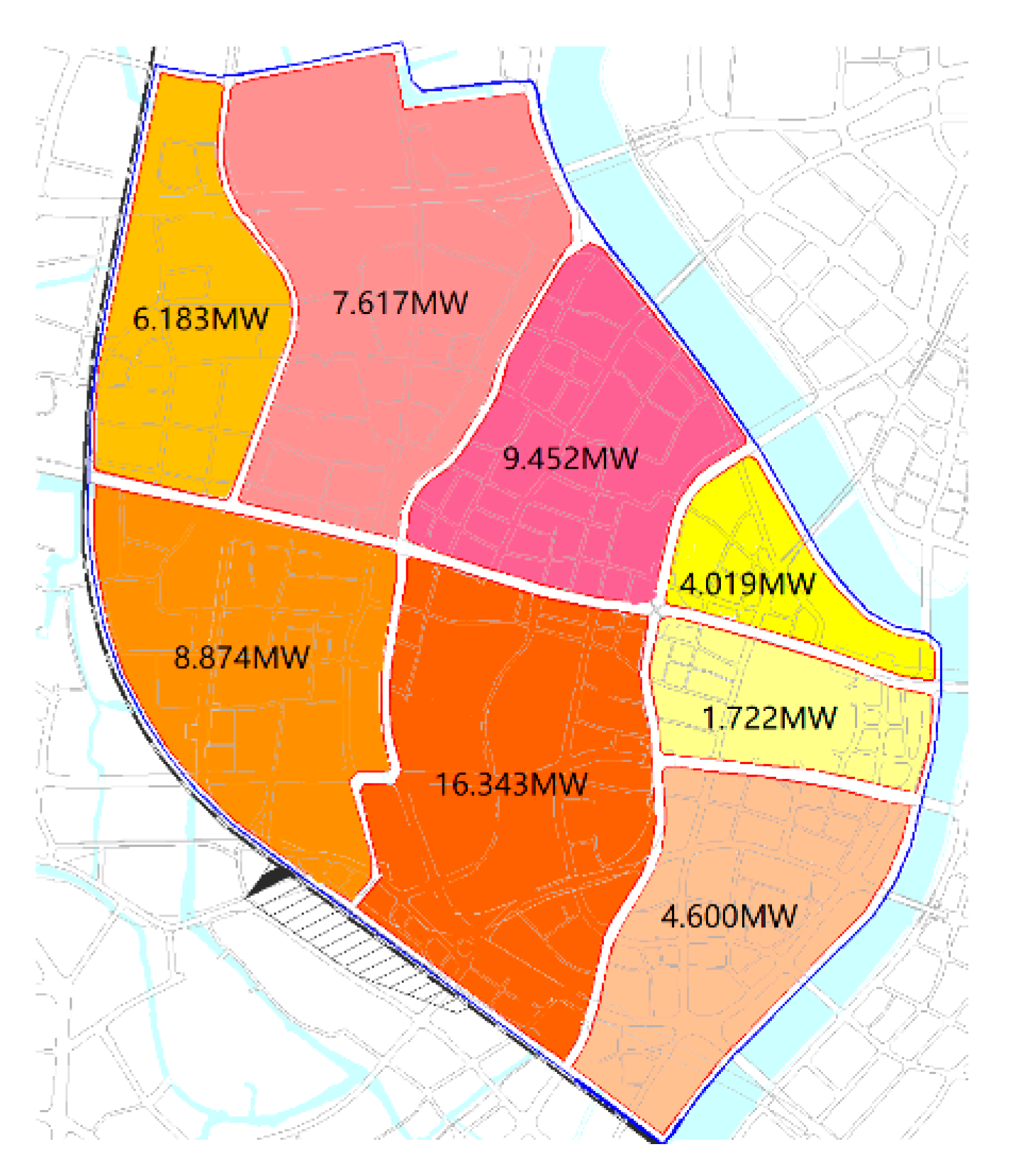
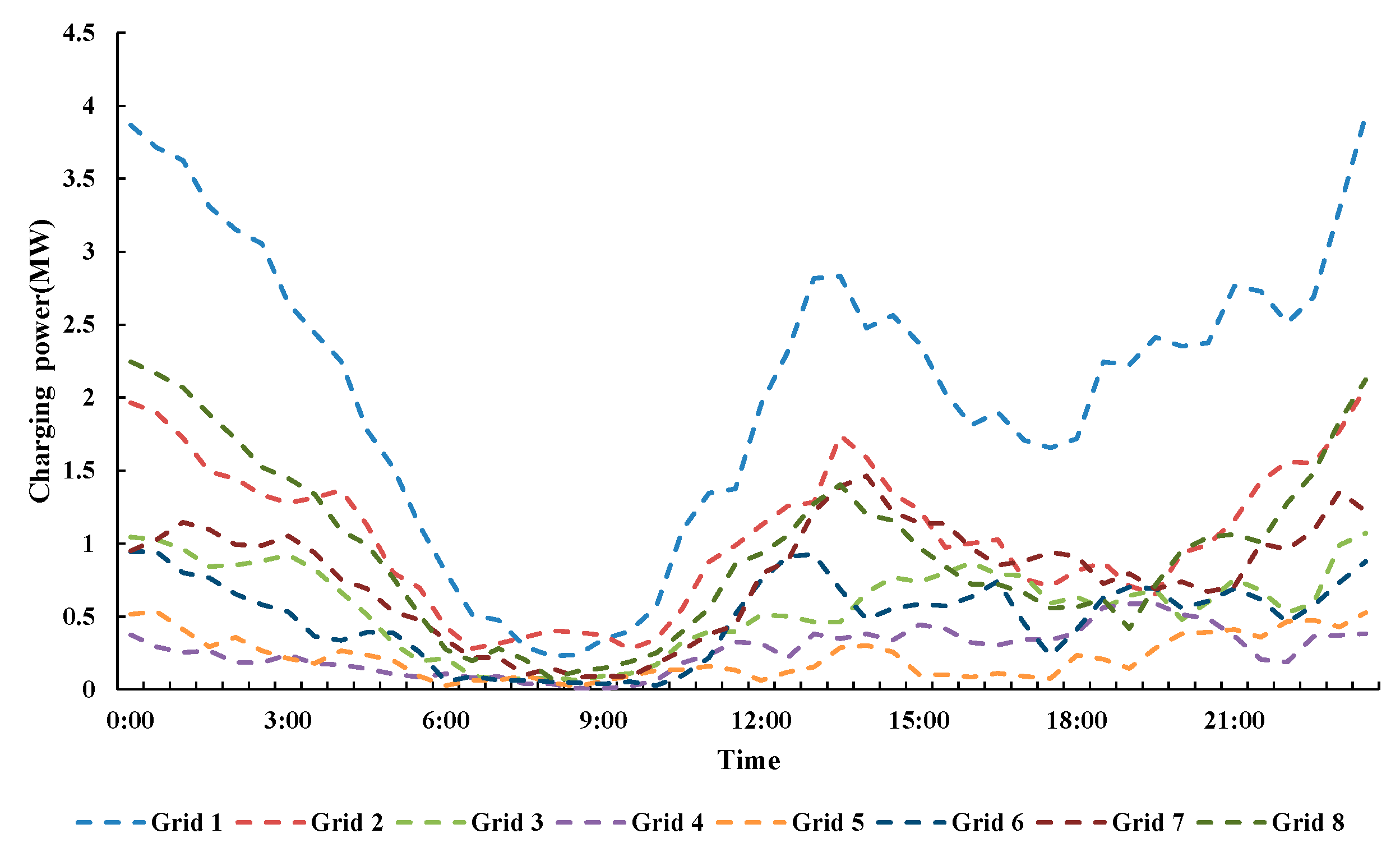
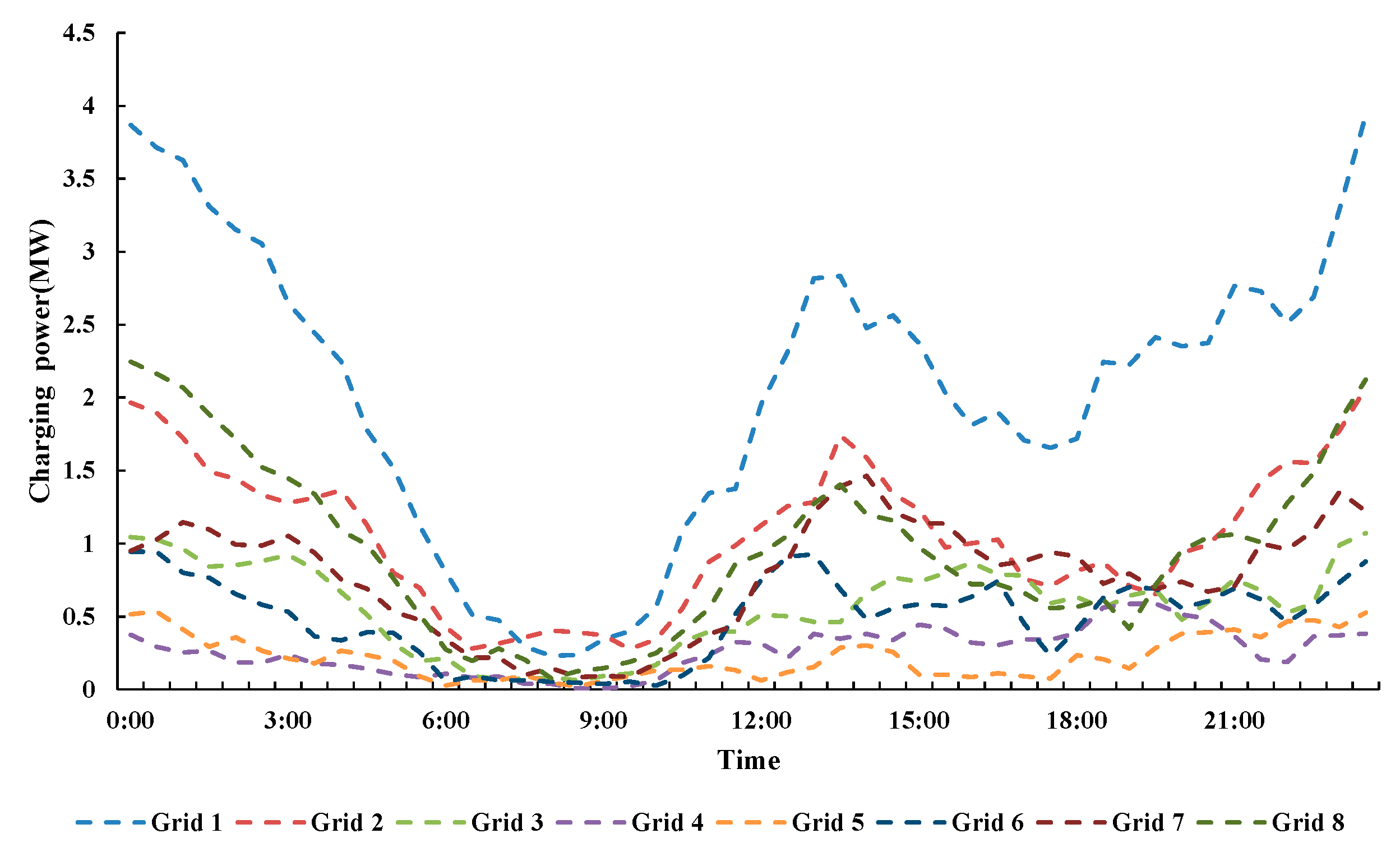
4.5. The Regional Distribution of OECL
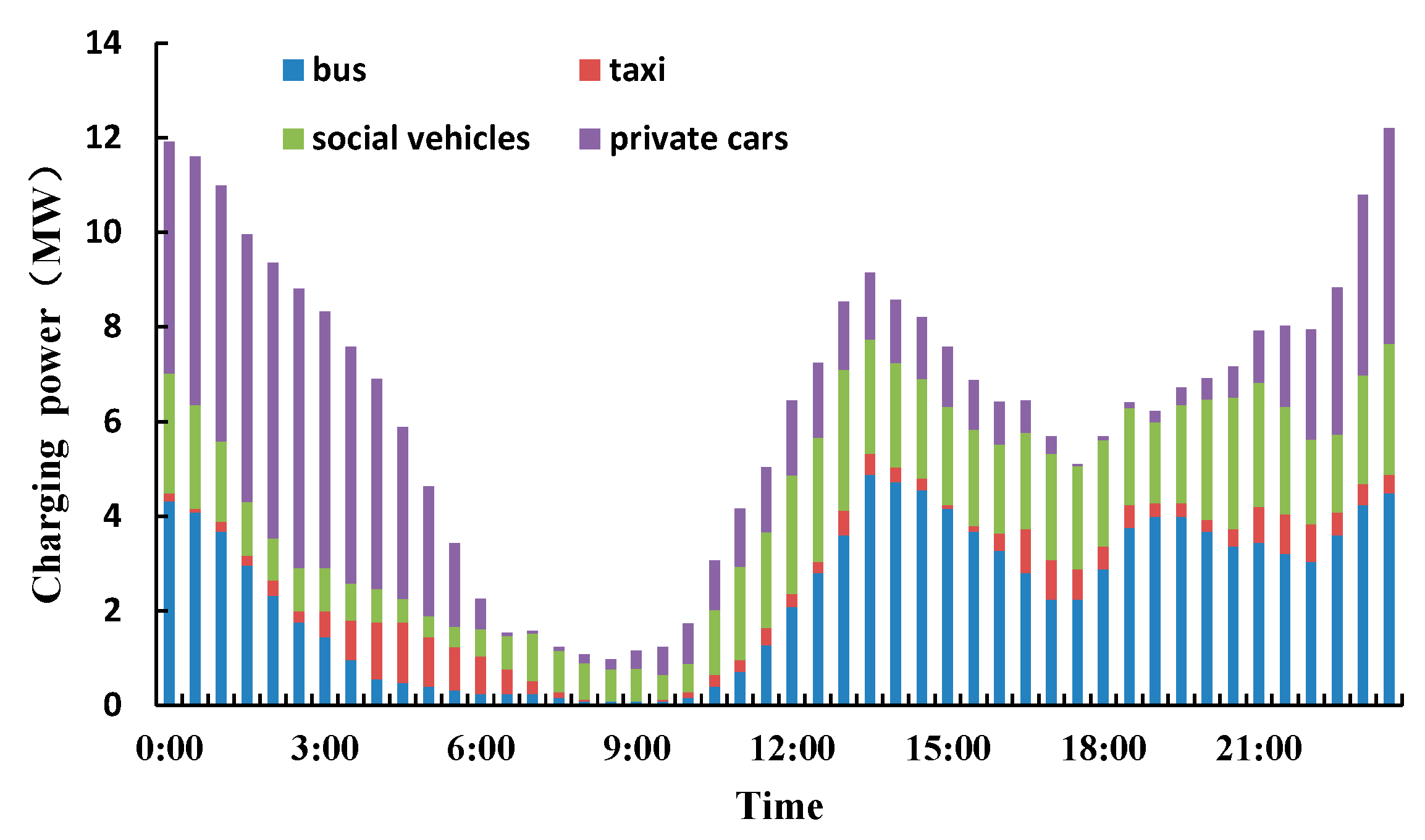
4.6. OECL for Different Types of EVs
4.7. Accommodation Potential Analysis
5. Conclusions
- (1)
- The participation of multiple flexible resources can effectively improve the ACE. To be specific, the impacts of DGs, especially PVs, are mainly demonstrated in the midday load peak period, and the ACE can be increased up to 10% for the studied sample system.
- (2)
- By considering credible N − 1 contingencies and zoning rules in the distribution network, more accurate ACE can be attained.
- (3)
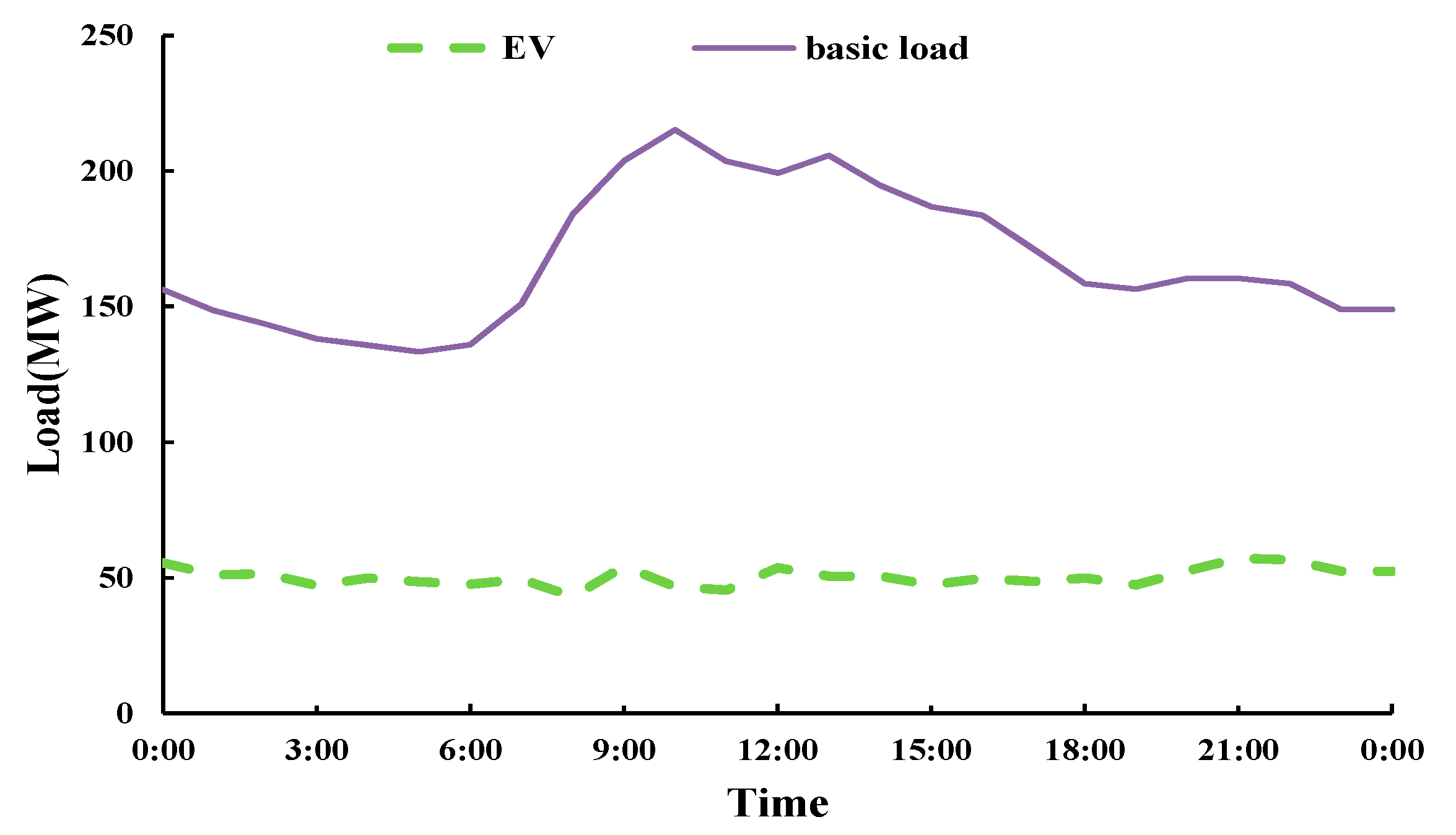
- The regional OECL reflects the charging load distribution of EVs in different parts of the power distribution system, while the OECL evaluation for different types of EVs reveals the composition and temporal distribution of EV charging loads. The peak load of EVs occurs at around 14:00 and 23:00, while the amount and time-space distribution of the EV charging load are mainly determined by electric buses and private cars. Coordinated charging optimization of private cars can help mitigate the load peak-valley difference.
- (4)
- From the perspective of traffic flow or the coordinated charging strategies, there is a certain degree of spatial and temporal distribution mismatch between the ACE and EV charging. In this case, analysis results of the proposed model lay the foundation for distribution system expansion and the planning and construction of the EV charging facilities in the future.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Abus | function amplitude |
| charging state of the vth bus in time period t; | |
| electricity purchasing price in time period t | |
| unit generation cost of DG unit g in time period t | |
| unit compensation price for interruptible loads in time period t | |
| unit compensation price for transferable loads in time period t | |
| unit compensation cost of the energy storage device in time period t | |
| probability distribution function of the charging duration of the buses | |
| NEV | number of nodes with EV charging facilities |
| Nnode | number of nodes in the system |
| NDG | number of DG units |
| NIL | number of interruptible loads |
| NTL | number of transferable loads |
| NESS | number of energy storage devices |
| number of buses connected to node i for charge | |
| EV charging power at node i in time period t | |
| active power injected at node i in time period t | |
| active power curtailment of interruptible load d in time period t | |
| transferred active power of transferable load r in time period t | |
| active charging power of energy storage device m in time period t | |
| active discharging power of energy storage device m in time period t | |
| active loads at node i in time period t | |
| Pij,t | active power on branch ij in time period t |
| quadratic terms of Pij,t | |
| sum of the rated charging power of all charging piles connected to node i | |
| upper limits of the active power of transformer k | |
| Pij,t | active power of feeder ij in time period t |
| active power capacity limit of feeder ij | |
| capacity of wind turbine w in time period t | |
| actual active power output of wind turbine w in time period t | |
| capacity of PV unit p | |
| actual active power output of PV unit p in time period t | |
| charging rate of taxies | |
| battery capacity of taxies | |
| Pcut | peak-valley difference of the system load |
| Ppeak | load peak |
| Pvalley | load valley |
| total charging power of buses connected to node i within time period t | |
| capacity of energy storage device m | |
| optimized electric vehicle charging load connected to node i within time period t | |
| reactive loads at node i in time period t | |
| reactive power injected at node i in time period t | |
| Qij,t | reactive power on branch ij in time period t |
| quadratic terms of Qij,t | |
| upper limits of the reactive power of transformer k | |
| rij | resistance of branch ij |
| Sm | charged state value of energy storage device m |
| upper limits of the charged state of device m | |
| lower limits of the charged state of device m | |
| Stin | initial SOC of a taxi |
| Sexp | expected SOC of a taxi |
| T | number of time periods |
| Td | load interruption time |
| upper limits of the interruption time period | |
| lower limits of the interruption time period | |
| time of arrival at the charging pile of the vth EV | |
| departure time of the vth EV | |
| charging duration of the vth EV | |
| tbin | charging duration of a bus |
| V0 | voltage amplitude at a slack bus |
| Vi,t | voltage amplitude at node i in time period t |
| voltage amplitude of a supply substation | |
| upper limits of the voltage amplitude at node i | |
| lower limits of the voltage amplitude at node i | |
| w | weight of the objective functions |
| xij | reactance of branch ij |
| ΩS | sets of the supply substation nodes |
| ΩE | sets of nodes in the distribution system |
| ΩL | sets of branches in the distribution system |
| Ωi | set of nodes directly connected to node i |
| ΩJ | sets of nodes in wiring group l |
| ΩF | sets of feeders in wiring group l |
| ΩA | sets of nodes in region A |
| λij,t | working state of branch ij in time period t |
| charging state of energy storage device m in time period t | |
| discharging state of energy storage device m in time period t | |
| maximum allowed proportion of ILs over the total loads in time period t | |
| maximum allowed proportion of TLs over the total loads in time period t | |
| μbus | mean of the logarithmic charging duration |
| σbus | standard deviation of the logarithmic charging duration |
References
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, W.; Wen, F.; Salam, A.; Mao, J.; Li, L. Bidding strategy for aggregators of electric vehicles in day-ahead electricity markets. Energies 2017, 10, 144. [Google Scholar] [CrossRef]
- Sundstrom, O.; Binding, C. Flexible charging optimization for electric vehicles considering distribution grid constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
- Saldaña, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric vehicle into the grid: Charging methodologies aimed at providing ancillary services considering battery degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Aymen, F.; Mahmoudi, C. A novel energy optimization approach for electrical vehicles in a smart city. Energies 2019, 12, 929. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the impacts of plug-in hybrid electric vehicles on power distribution systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Gomez, J.C.; Morcos, M.M. Impact of EV battery chargers on the power quality of distribution systems. IEEE Trans. Power Deliv. 2003, 18, 975–981. [Google Scholar] [CrossRef]
- Gong, Q.; Midlam-Mohler, S.; Marano, V.; Rizzoni, G. Study of PEV charging on residential distribution transformer life. IEEE Trans. Smart Grid 2012, 3, 404–412. [Google Scholar] [CrossRef]
- Staats, P.T.; Grady, W.M.; Arapostathis, A.; Thallam, R.S. A statistical method for predicting the net harmonic currents generated by a concentration of electric vehicle battery chargers. IEEE Trans. Power Deliv. 1997, 12, 1258–1266. [Google Scholar] [CrossRef]
- Heussen, K.; Bondy, D.E.M.; Hu, J.; Gehrke, O.; Hansen, L.H. A clearinghouse concept for distribution-level flexibility services. In Proceedings of the IEEE PES ISGT Europe 2013, Lyngby, Copenhagen, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar]
- Hu, J.; Sarker, M.R.; Wang, J.; Wen, F.; Liu, W. Provision of flexible ramping product by battery energy storage in day-ahead energy and reserve markets. IET Gener. Transm. Distrib. 2018, 12, 2256–2264. [Google Scholar] [CrossRef]
- Wang, Q.; Hodge, B. Enhancing power system operational flexibility with flexible ramping products: A review. IEEE Trans. Ind. Inform. 2017, 13, 1652–1664. [Google Scholar] [CrossRef]
- Wu, D.; Aliprantis, D.C.; Ying, L. Load scheduling and dispatch for aggregators of plug-in electric vehicles. IEEE Trans. Smart Grid 2012, 3, 368–376. [Google Scholar] [CrossRef]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. A market mechanism for electric vehicle charging under network constraints. IEEE Trans. Smart Grid 2016, 7, 827–836. [Google Scholar] [CrossRef]
- Weckx, S.; D’Hulst, R.; Claessens, B.; Driesensam, J. Multiagent charging of electric vehicles respecting distribution transformer loading and voltage limits. IEEE Trans. Smart Grid 2014, 5, 2857–2867. [Google Scholar] [CrossRef]
- Wang, G.; Zhao, J.; Wen, F.; Xue, Y.; Ledwich, G. Dispatch strategy of PHEVs to mitigate selected patterns of seasonally varying outputs from renewable generation. IEEE Trans. Smart Grid 2015, 6, 627–639. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, S.; Wang, K.; Liu, W.; Xu, Y.; Wen, F. A method to evaluate maximum available capability of accommodating plug-in electric vehicles in residential distribution networks. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. Optimal charging of electric vehicles taking distribution network constraints into account. IEEE Trans. Power Syst. 2015, 30, 365–375. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J.; Xu, Z.; Wang, C.; Wan, C.; Chen, C. Distribution network electric vehicle hosting capacity maximization: A chargeable region optimization model. IEEE Trans. Power Syst. 2017, 32, 4119–4130. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Chakraborty, S.; Vu, H.; Mahedi Hasan, M.; Tran, D.; EI Baghdadi, M.; Hegazy, O. DC-DC converter topologies for electric vehicles, plug-in hybrid electric vehicles and fast charging stations: state of the art and future trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Nurunnabi Mollah, M.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1992, 4, 1401–1407. [Google Scholar] [CrossRef]
- Ugranli, F.; Karatepe, E. Transmission expansion planning for wind turbine integrated power systems considering contingency. IEEE Trans. Power Syst. 2016, 31, 1476–1485. [Google Scholar] [CrossRef]
- Villumsen, J.C.; Brønmo, G.; Philpott, A.B. Line capacity expansion and transmission switching in power systems with large-scale wind power. IEEE Trans. Power Syst. 2013, 28, 731–739. [Google Scholar] [CrossRef]
- GAMS: the Solver Manuals [EB/OL]. Available online: http://www.gams.com/help/topic/gams.doc/solvers/allsolvers.pdf (accessed on 29 July 2004).
- Venter, G.; Sobieszczanski-Sobieski, J. Particle swarm optimization. AIAA J. 2003, 41, 1583–1589. [Google Scholar] [CrossRef]
- Zhao, J.H.; Foster, J.; Dong, Z.Y.; Wong, K.P. Flexible transmission network planning considering distributed generation impacts. IEEE Trans. Power Syst. 2011, 26, 1434–1443. [Google Scholar] [CrossRef]
- Tong, C. Refinement strategies for stratified sampling methods. Reliab. Eng. Syst. Saf. 2006, 99, 1257–1265. [Google Scholar] [CrossRef]
- Rezaei, P.; Frolik, J.; Hines, P.D. Packetized plug-in electric vehicle charge management. IEEE Trans. Smart Grid 2014, 5, 642–650. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | Battery Size (kWh) | Charging Rate (kW) | Type of Charger |
|---|---|---|---|
| Bus | 324 | 80 | DC |
| Taxi | 57 | 40 | DC |
| Social vehicle | 57 | 40 | DC |
| Car | 25.6 | 7 | AC |
| Vehicle Type | Grid-1 | Grid-2 | Grid-3 | Grid-4 | Grid-5 | Grid-6 | Grid-7 | Grid-8 |
|---|---|---|---|---|---|---|---|---|
| Bus | 52 | 35 | 13 | 10 | 6 | 12 | 19 | 25 |
| Taxi | 50 | 19 | 14 | 4 | 5 | 10 | 15 | 17 |
| Social vehicle | 429 | 204 | 117 | 53 | 48 | 92 | 136 | 165 |
| Car | 302 | 161 | 94 | 18 | 35 | 74 | 113 | 170 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Q.; Feng, C.; Wen, F.; Tseng, C.-L.; Wang, L.; Zou, B.; Zhang, X. Evaluation of Accommodation Capability for Electric Vehicles of a Distribution System Considering Coordinated Charging Strategies. Energies 2019, 12, 3056. https://doi.org/10.3390/en12163056
Deng Q, Feng C, Wen F, Tseng C-L, Wang L, Zou B, Zhang X. Evaluation of Accommodation Capability for Electric Vehicles of a Distribution System Considering Coordinated Charging Strategies. Energies. 2019; 12(16):3056. https://doi.org/10.3390/en12163056
Chicago/Turabian StyleDeng, Qing, Changsen Feng, Fushuan Wen, Chung-Li Tseng, Lei Wang, Bo Zou, and Xizhu Zhang. 2019. "Evaluation of Accommodation Capability for Electric Vehicles of a Distribution System Considering Coordinated Charging Strategies" Energies 12, no. 16: 3056. https://doi.org/10.3390/en12163056
APA StyleDeng, Q., Feng, C., Wen, F., Tseng, C.-L., Wang, L., Zou, B., & Zhang, X. (2019). Evaluation of Accommodation Capability for Electric Vehicles of a Distribution System Considering Coordinated Charging Strategies. Energies, 12(16), 3056. https://doi.org/10.3390/en12163056