An Optimal Energy Management System for Real-Time Operation of Multiagent-Based Microgrids Using a T-Cell Algorithm

 ,
,  , ,
, , 
Abstract
:1. Introduction
1.1. Target
- The implementation of an enhanced version of the T-Cell algorithm for RT-EMS within MG;
- The integration of the Multiagent EMS with the testbed lab using DDS;
- Fault tolerance implementation of the multiagent EMS;
- The experimental validation and implementation of this architecture into a real MG;
- Competitive time delay optimization for real-time application.
1.2. Materials
1.3. Method
2. Problem Formulation
- The distribution of power losses neglected;
- The electric water heater is considered a controllable load;
- The reactive power flow is neglected;
- The MG is operating in connected mode.
3. Proposed Algorithm for the Real-Time Optimization
- represents the decision variables of the dispatch problem;
- The objective function value for ;
- The proliferation is the number of clones that the cell will generate;
- The differentiation is the number of decision variables that will be changed when the differentiation process takes place;
- The power generated by ;
- The equality constraint violation (ECV) for ();
- The inequality constraints violation (ICV) sum;
- The feasible propriety indicates if the cell is feasible or not. A cell is considered as feasible if: ECV = 0 and ICV = 0. This means that if a solution generates less than the demanded power (ECV < 0) or more than needed (ECV > 0), or the decision variable are in a prohibited zone (ICV < 0) or (ICV > 0) then it is considered as infeasible.
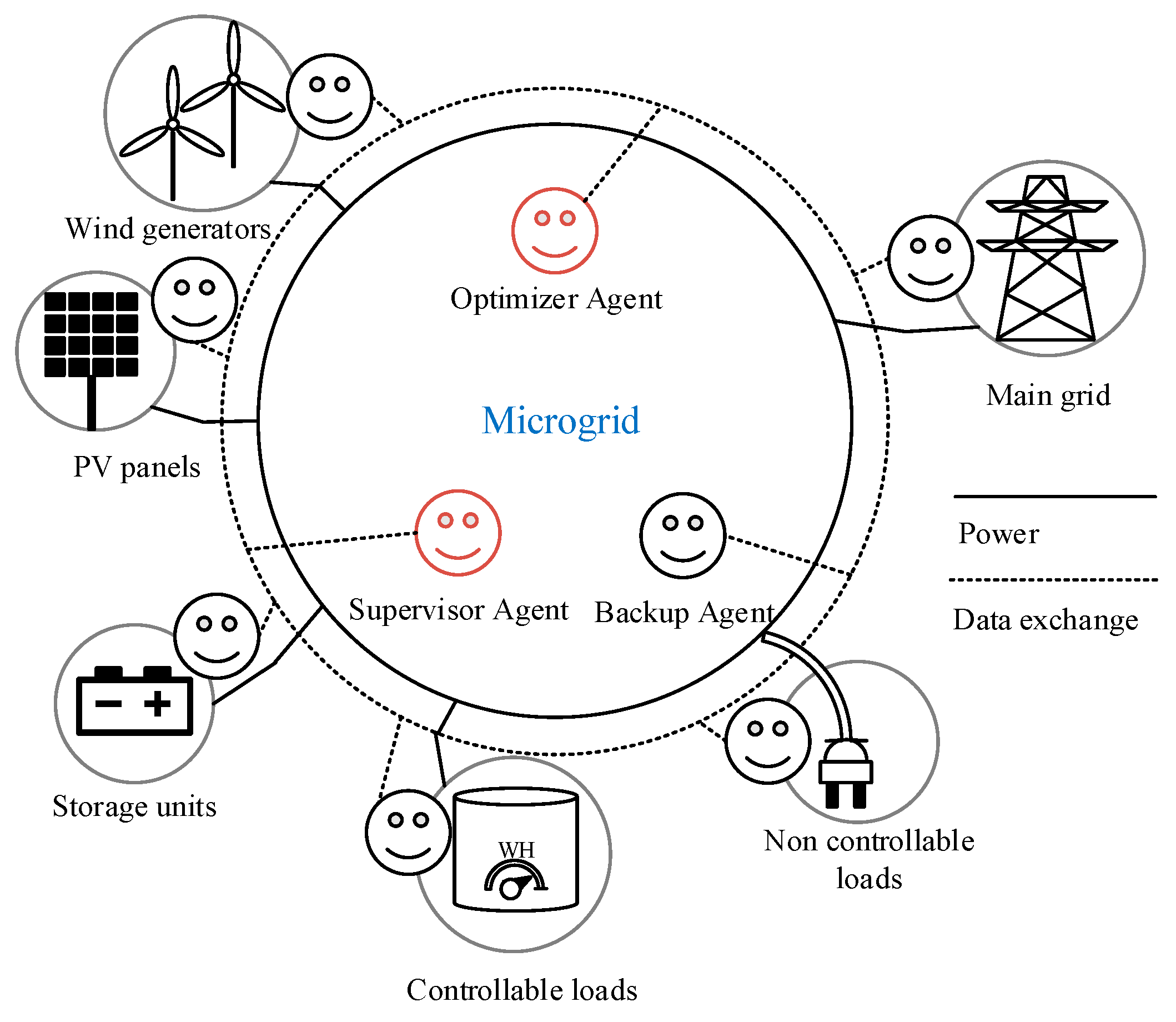
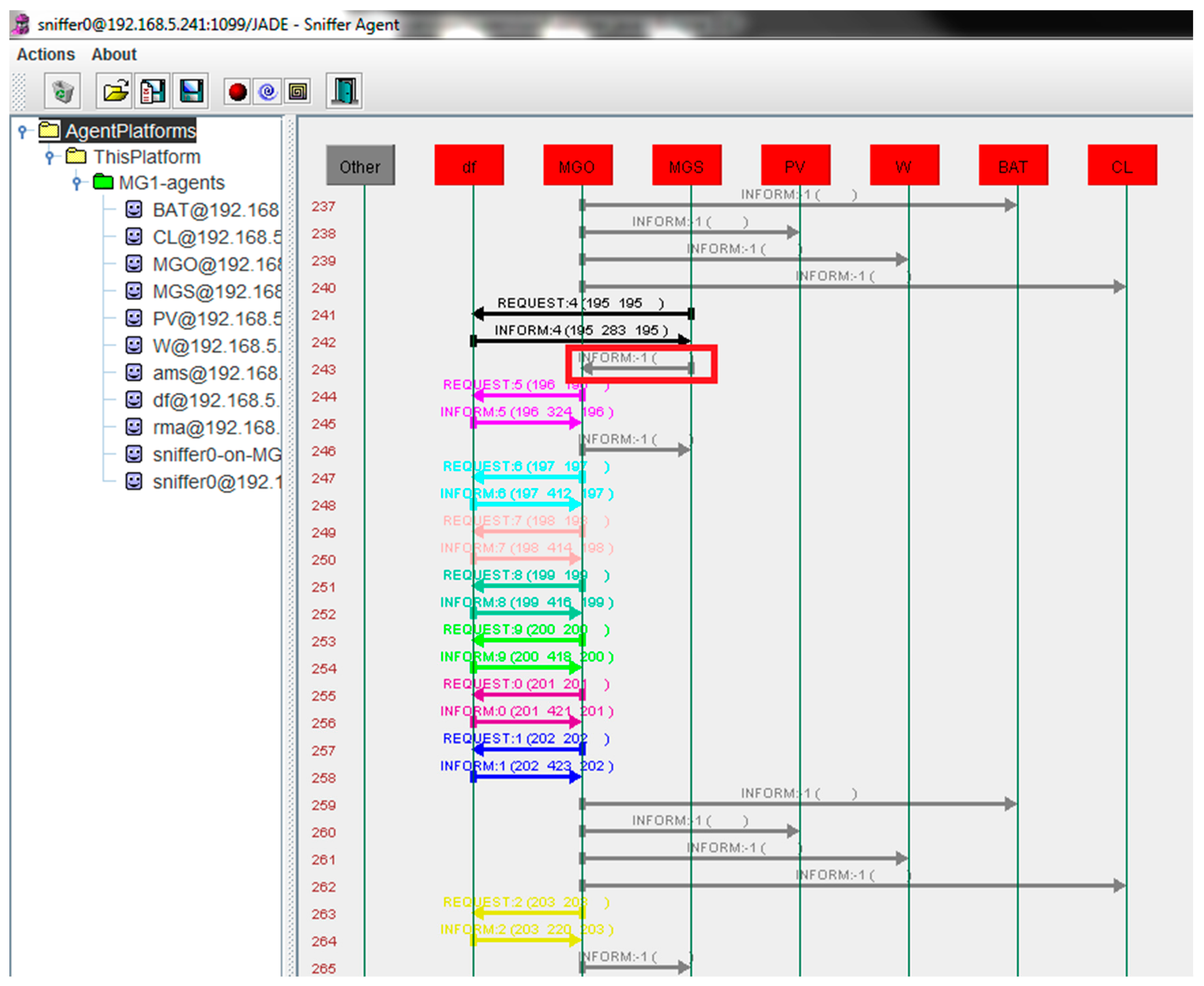
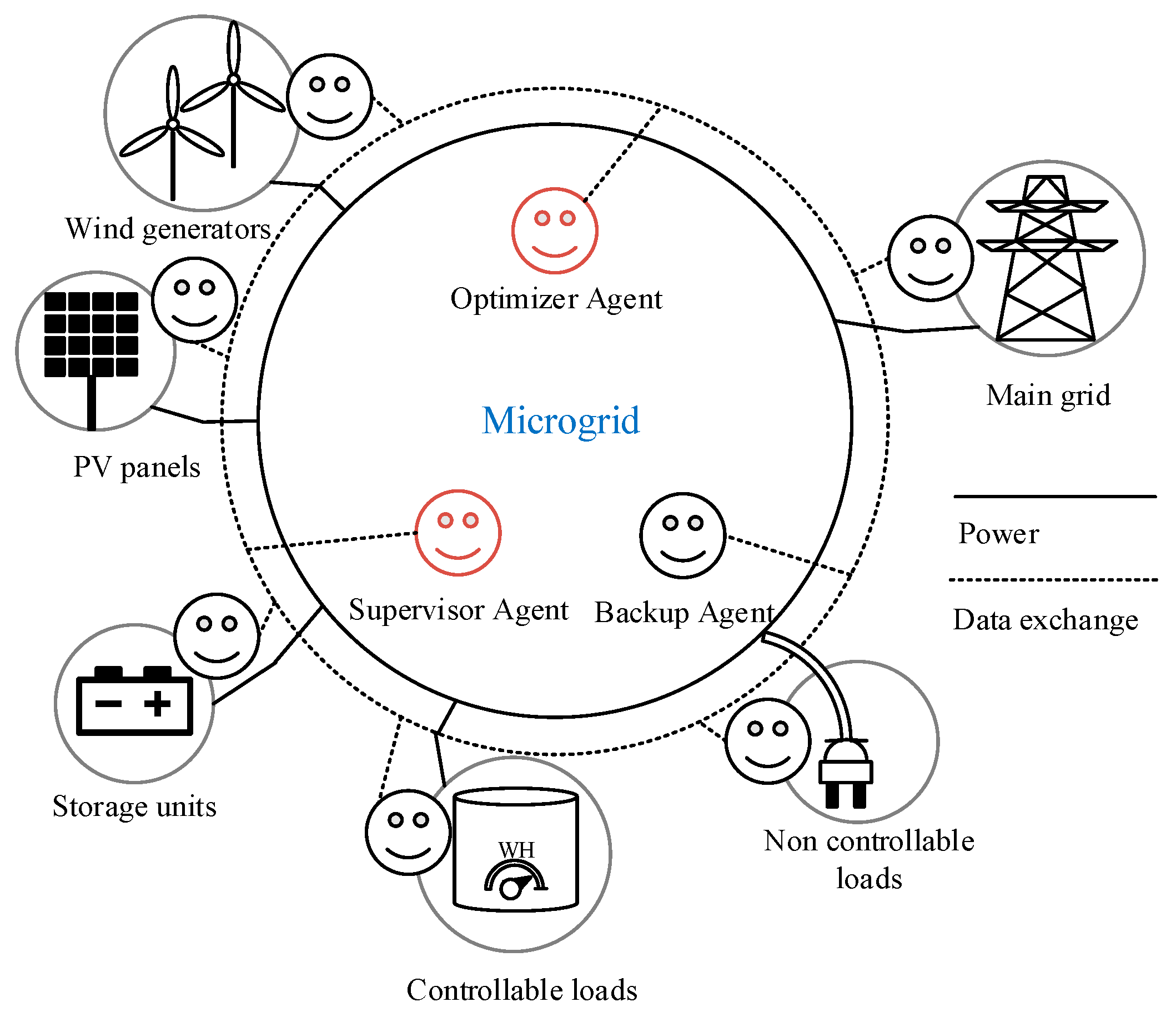
4. Proposed Multiagent EMS Platform
4.1. Management Agents
4.2. Backup Agent
4.3. Interoperability Agents
5. Results
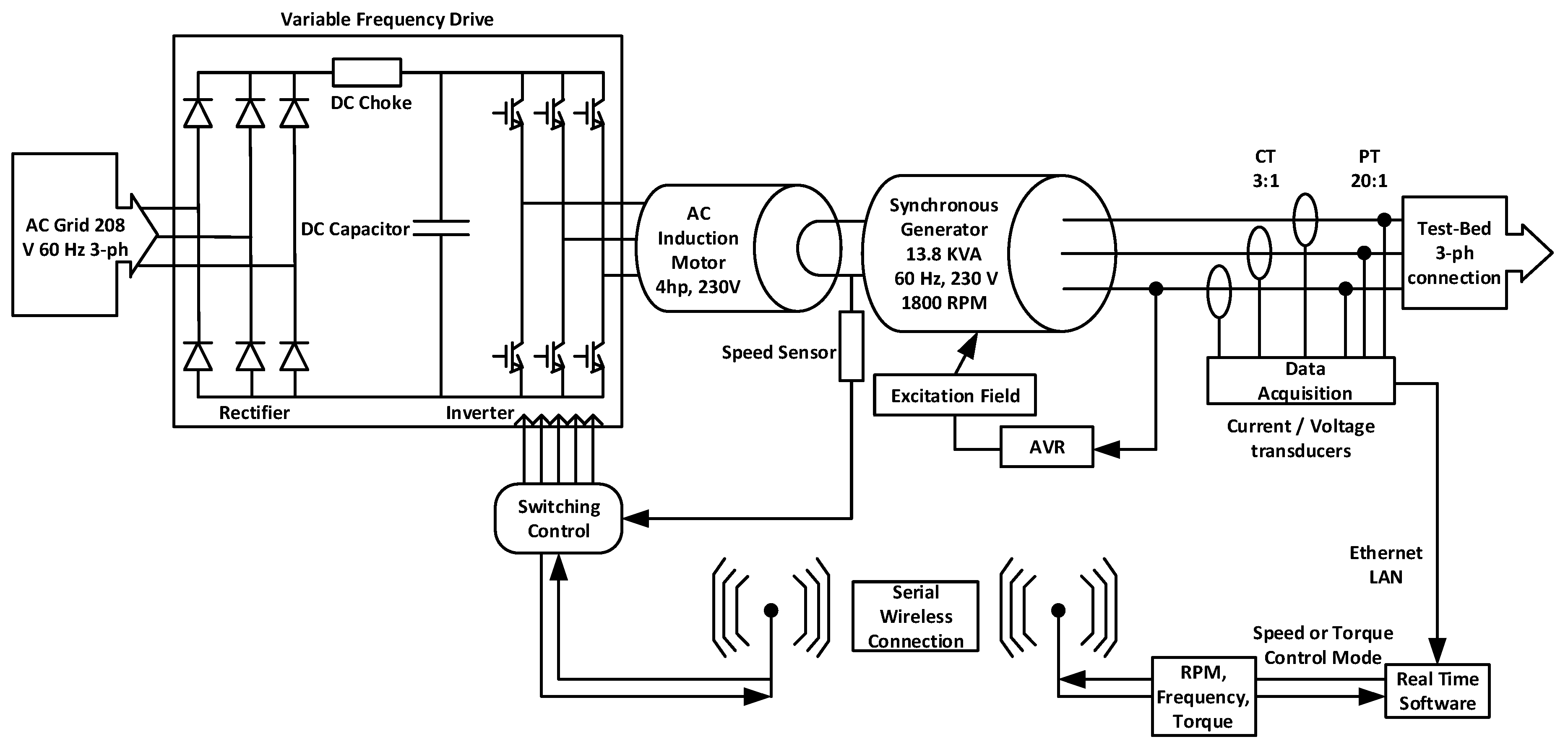
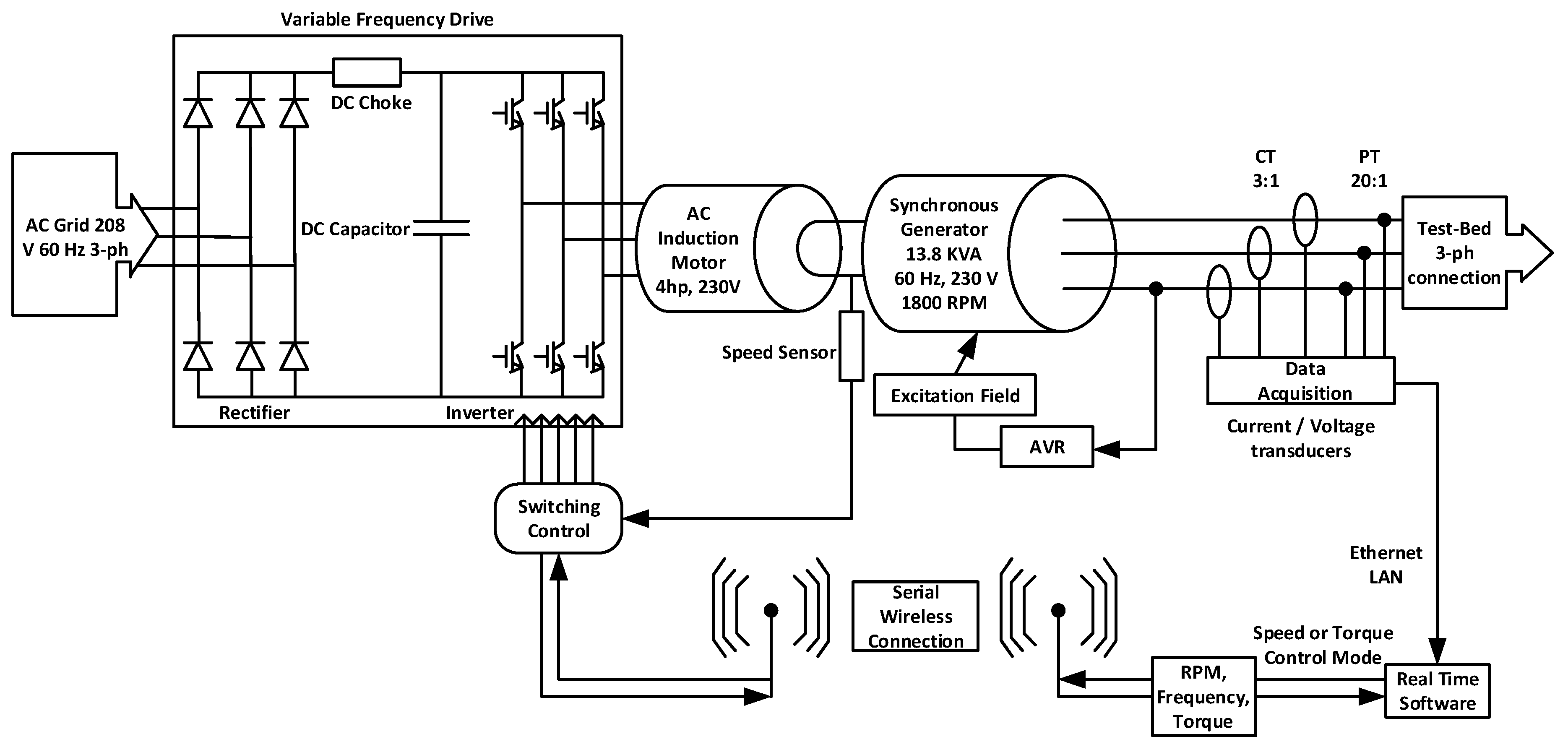
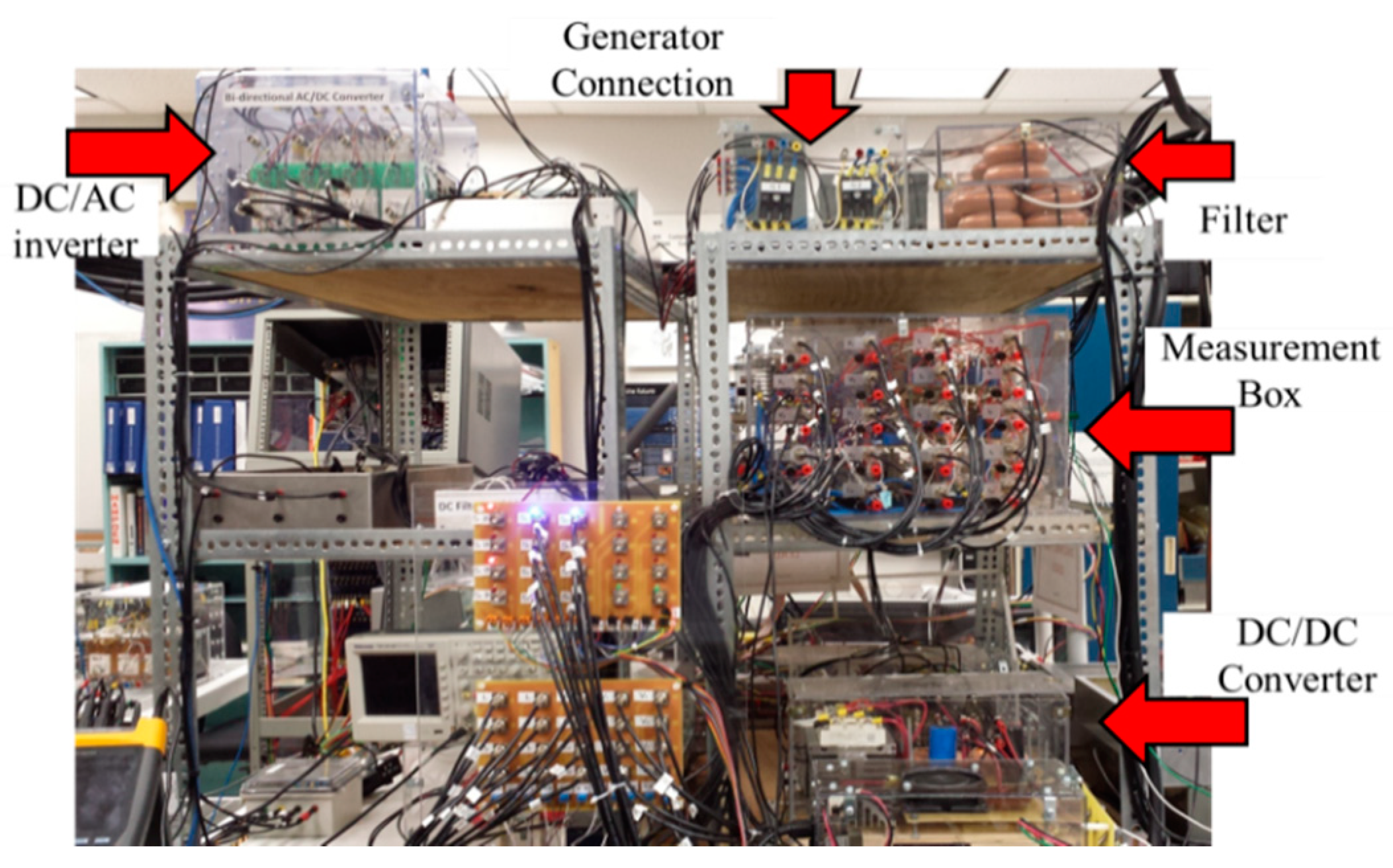
5.1. Description of the Cyber-Physical Setup
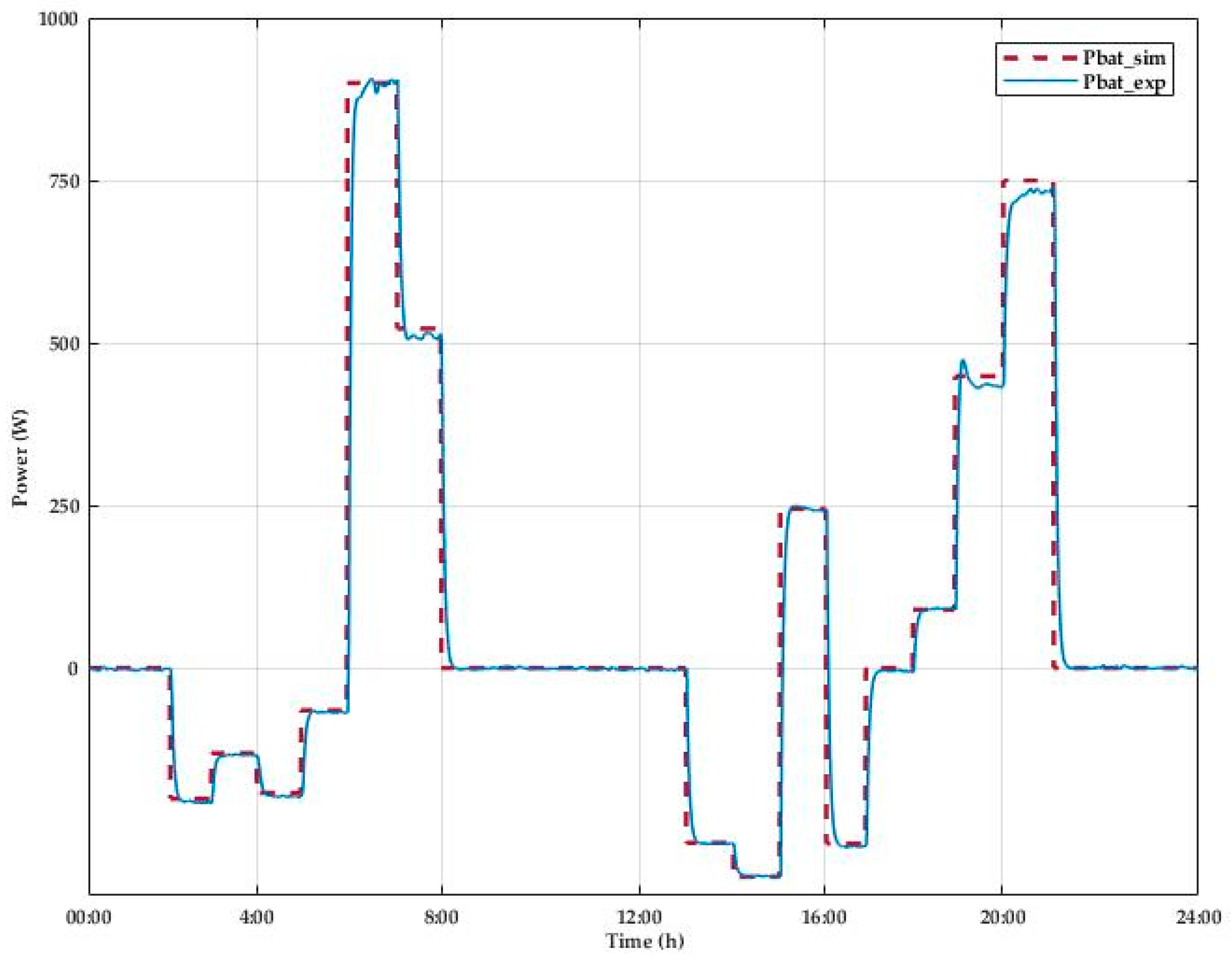
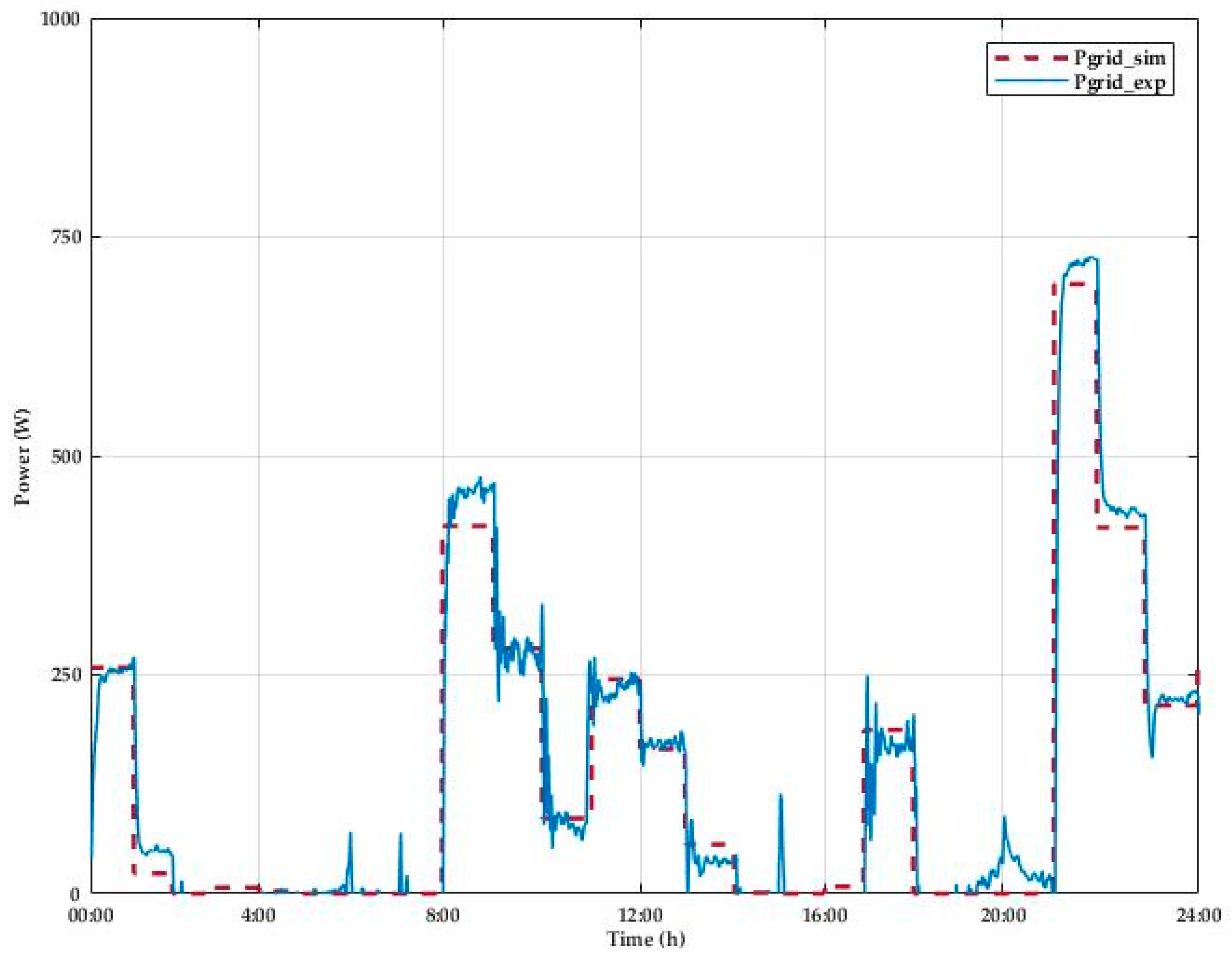
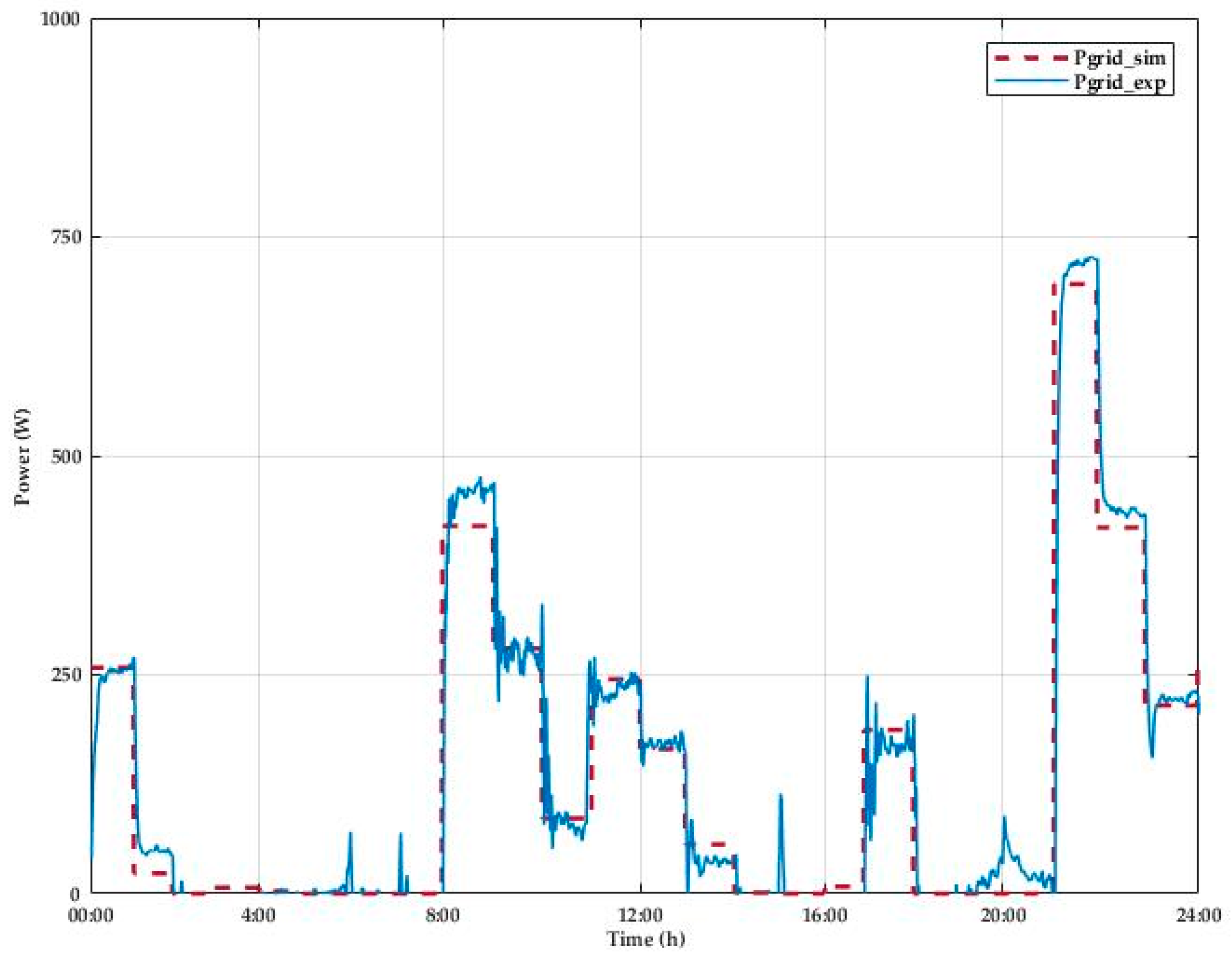
5.2. Experiment Results
5.2.1. Case Study 1
5.2.2. Case Study 2
5.2.3. Case Study 3
- Scenario 1: Normal operation of the MG. In this case, the system is running without sudden event. The MGO is computing and sending references of the generation units according to forecast data without any incident;
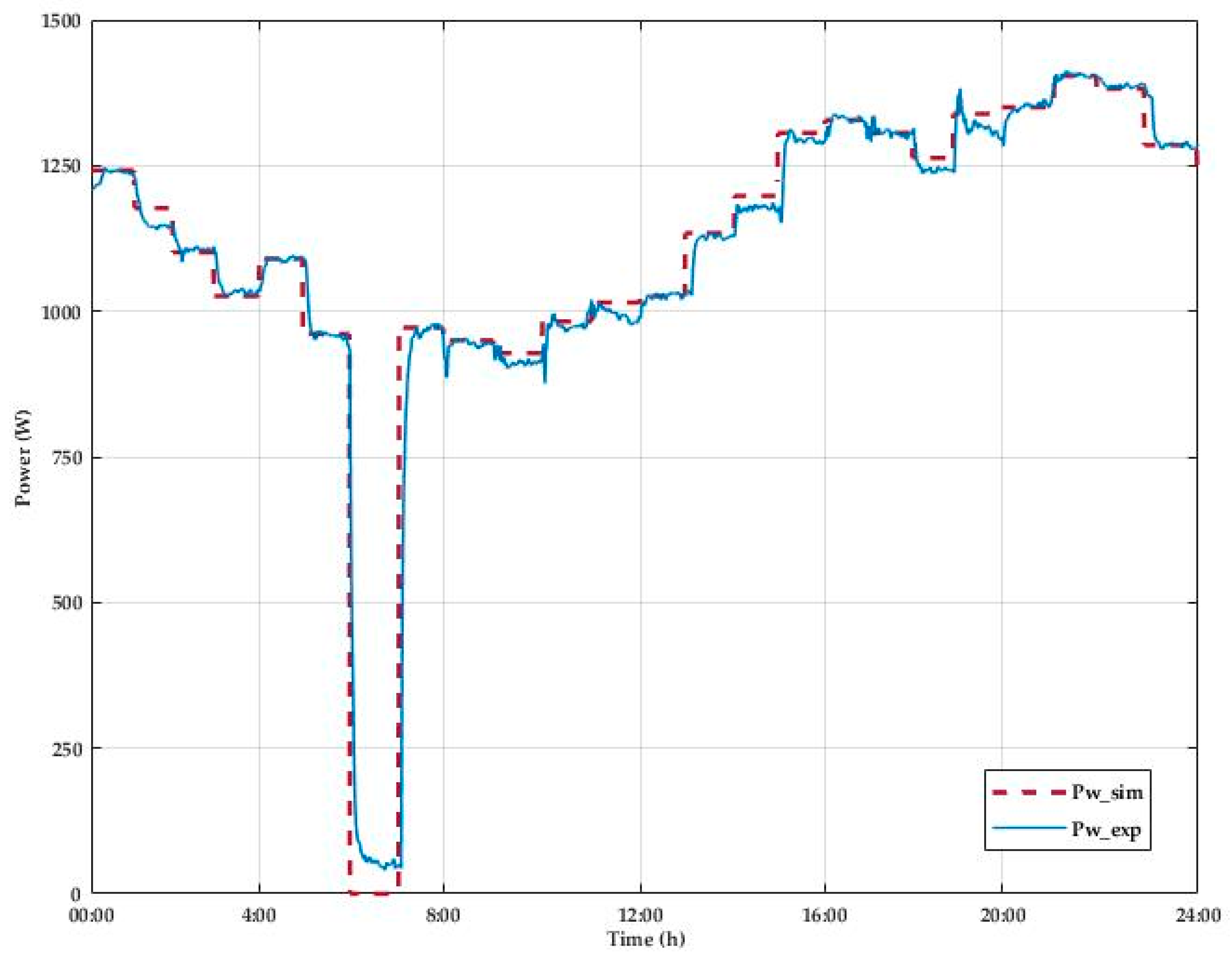
- Scenario 2: Generation drop. This case tests the ability of the system to operate after a significant shift in power generation. For this matter, the wind generator has been shut down during the period 6:00–7:00;
- Scenario 3: Sudden load variation. This scenario challenges MG operation when there is a sudden load increase. It is reflected in the period 15:00–16:00, where the load increases from 1500 to 2400 W.
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Margoum, E.H.; Krami, N.; Harmouch, F.Z.; Al montaser, H.; Seca, L.; Moreira, C. Design and Control of Single Phase Photovoltaic Systems for AC MicroGrid. In Proceedings of the 2016 International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 14–17 November 2016; pp. 1188–1193. [Google Scholar] [CrossRef]
- Margoum, E.H.; Krami, N.; Seca, L.; Moreira, C.; Mharzi, H. Design and Control of Parallel Three Phase Voltage Source Inverters in Low Voltage AC Microgrid. Adv. Electr. Electron. Eng. 2017, 15, 120–129. [Google Scholar] [CrossRef]
- Jebaraj, L.; Venkatesan, C.; Soubache, I.; Rajan, C.C.A. Application of Differential Evolution Algorithm in Static and Dynamic Economic or Emission Dispatch Problem: A Review. Renew. Sustain. Energy Rev. 2017, 77, 1206–1220. [Google Scholar] [CrossRef]
- Dieu, V.N.; Ongsakul, W.; Polprasert, J. The Augmented Lagrange Hopfield Network for Economic Dispatch with Multiple Fuel Options. Math. Comput. Model. 2013, 57, 30–39. [Google Scholar] [CrossRef]
- Secui, D.C. Large-Scale Multi-Area Economic/Emission Dispatch Based on a New Symbiotic Organisms Search Algorithm. Energy Convers. Manag. 2017, 154, 203–223. [Google Scholar] [CrossRef]
- Tade, S.V.; Ghate, V.N.; Mulla, S.Q.; Kalgunde, M.N. Application of Dynamic Programming Algorithm for Thermal Unit Commitment with Wind Power. In Proceedings of the 2018 IEEE Global Conference on Wireless Computing and Networking, GCWCN, Lonavala, India, 23–24 November 2018; pp. 182–186. [Google Scholar] [CrossRef]
- Mohsen, N.; Braun, M.; Tenbohlen, S. Optimization of Unit Commitment and Economic Dispatch in Microgrids Based on Genetic Algorithm and Mixed Integer Linear Programming. Appl. Energy 2018, 210, 944–963. [Google Scholar]
- Moghaddam, M.M.; Marzband, M.; Azarinejadian, F. Optimal Energy Management for a Home Microgrid Based on Multi-Period Artificial Bee Colony. In Proceedings of the 25th Iranian Conference on Electrical Engineering (lCEE2017), Tehran, Iran, 2–4 May 2017; pp. 1446–1451. [Google Scholar]
- Shi, W.; Li, N.; Chu, C.-C.; Gadh, R. Real-Time Energy Management in Microgrids. IEEE Trans. Smart Grid 2017, 8, 228–238. [Google Scholar] [CrossRef]
- Marzband, M.; Ghazimirsaeid, S.S.; Uppal, H.; Fernando, T. A Real-Time Evaluation of Energy Management Systems for Smart Hybrid Home Microgrids. Electr. Power Syst. Res. 2017, 143, 624–633. [Google Scholar] [CrossRef]
- Netto, R.S.; Ramalho, G.R.; Bonatto, B.D.; Carpinteiro, O.A.S.; Zambroni De Souza, A.C.; Oliveira, D.Q.; Braga, R.A.S. Real-Time Framework for Energy Management System of a Smart Microgrid Using Multiagent Systems. Energies 2018, 11, 656. [Google Scholar] [CrossRef]
- Aragon, V.S.; Esquivel, S.C.; Coello Coello, C.A. Optimizing Constrained Problems through a T-Cell Artificial Immune System. J. Comput. Sci. Technol. 2008, 8, 158–165. [Google Scholar]
- Alberts, B.; Johnson, A.; Lewis, J.; Raff, M.; Roberts, K.; Walter, P. Helper T Cells and Lymphocyte Activation. In Molecular Biology of the Cell; Garland Science: New York, NY, USA, 2002. [Google Scholar]
- Aragon, V.S.; Esquivel, S.C.; Coello Coello, C.A. A T-Cell Algorithm for Solving Dynamic Optimization Problems. Inf. Sci. 2011, 181, 3614–3637. [Google Scholar] [CrossRef]
- Aragón, V.S.; Esquivel, S.C.; Coello Coello, C.A. An Immune Algorithm with Power Redistribution for Solving Economic Dispatch Problems. Inf. Sci. 2015, 295, 609–632. [Google Scholar] [CrossRef]
- Harmouch, F.Z.; Krami, N.; Benhaddou, D.; Hmina, N.; Zayer, E.; Margoum, E.H. Survey of Multiagents Systems Application in Microgrids. In Proceedings of the 2nd International Conference on Electrical and Information Technologies ICEIT’2016, Tangier, Morocco, 4–7 May 2016; pp. 270–275. [Google Scholar]
- Mcarthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I : Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef]
- Harmouch, F.Z.; Krami, N.; Hmina, N. A Multiagent Based Decentralized Energy Management System for Power Exchange Minimization in Microgrid Cluster. Sustain. Cities Soc. 2018, 40, 416–427. [Google Scholar] [CrossRef]
- Pinto, T.; Ghazvini, M.A.F.; Soares, J.; Faia, R.; Corchado, J.M.; Castro, R.; Vale, Z. Decision Support for Negotiations among Microgrids Using a Multiagent Architecture. Energies 2018, 11, 2526. [Google Scholar] [CrossRef]
- Cintuglu, M.H.; Martin, H.; Mohammed, O.A. Real-Time Implementation of Multiagent-Based Game Theory Reverse Auction Model for Microgrid Market Operation. IEEE Trans. Smart Grid 2015, 6, 1064–1072. [Google Scholar] [CrossRef]
- Mahmoudian Esfahani, M.; Hariri, A.; Mohammed, O.A. A Multiagent-Based Game-Theoretic and Optimization Approach for Market Operation of Multi-Microgrid Systems. IEEE Trans. Ind. Inform. 2018, 3203, 1–12. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M. Multi-Agent System for Energy Resource Scheduling of Integrated Microgrids in a Distributed System. Electr. Power Syst. Res. 2011, 81, 138–148. [Google Scholar] [CrossRef]
- Pinto, T.; Faia, R.; Navarro-Caceres, M.; Santos, G.; Corchado, J.M.; Vale, Z. Multi-Agent-Based CBR Recommender System for Intelligent Energy Management in Buildings. IEEE Syst. J. 2019, 13, 1084–1095. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Rahimi-Kian, A.; Mirian, M.S.; Guerrero, J.M. A Multi-Agent Based Energy Management Solution for Integrated Buildings and Microgrid System. Appl. Energy 2017, 203, 41–56. [Google Scholar] [CrossRef]
- Bui, V.; Hussain, A.; Kim, H. Optimal Operation of Microgrids Considering Auto-Configuration Function Using Multiagent System. Energies 2017, 10, 1484. [Google Scholar] [CrossRef]
- Choi, I.S.; Hussain, A.; Bui, V.H.; Kim, H.M. A Multi-Agent System-Based Approach for Optimal Operation of Building Microgrids with Rooftop Greenhouse. Energies 2018, 11, 1876. [Google Scholar] [CrossRef]
- Gómez-Expósito, A.; Conejo, J.A.; Cañizares, C. Electric Energy Systems Analysis and Operation; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Marzband, M.; Ghadimi, M.; Sumper, A.; Domínguez-garcía, J.L. Experimental Validation of a Real-Time Energy Management System Using Multi-Period Gravitational Search Algorithm for Microgrids in Islanded Mode. Appl. Energy 2014, 128, 164–174. [Google Scholar] [CrossRef]
- Xiaoping, L.; Ming, D.; Jianghong, H.; Pingping, H.; Yali, P. Dynamic Economic Dispatch for Microgrids Including Battery Energy Storage. IEEE Int. Symp. Power Electron. Distrib. Gener. Syst. 2010, 2, 914–917. [Google Scholar] [CrossRef]
- Marzband, M.; Parhizi, N.; Savaghebi, M.; Guerrero, J.M. Distributed Smart Decision-Making for a Multimicrogrid System Based on a Hierarchical Interactive Architecture. IEEE Trans. Energy Convers. 2016, 31, 637–648. [Google Scholar] [CrossRef]
- Ross, D.; Kim, S. Dynamic Economic Dispatch of Generation. IEEE Trans. Power Appar. Syst. 1980, 99, 2060–2068. [Google Scholar] [CrossRef]
- Liang, Z.X.; Glover, J.D. A Zoom Feature for a Dynamic Programming Solution to Economic Dispatch Including Transmission Losses. IEEE Trans. Power Syst. 1992, 7, 544–550. [Google Scholar] [CrossRef]
- Hemamalini, S.; Simon, S.P. Dynamic Economic Dispatch Using Maclaurin Series Based Lagrangian Method. Energy Convers. Manag. 2010, 51, 2212–2219. [Google Scholar] [CrossRef]
- Li, Z.; Wu, W.; Zhang, B.; Sun, H.; Guo, Q. Dynamic Economic Dispatch Using Lagrangian Relaxation With Multiplier Updates Based on a Quasi-Newton Method. IEEE Trans. Power Syst. 2013, 28, 4516–4527. [Google Scholar] [CrossRef]
- Shilaja, C.; Ravi, K. Optimization of Emission/Economic Dispatch Using Euclidean Affine Flower Pollination Algorithm (EFPA) and Binary FPA (BFPA) in Solar Photo Voltaic Generation. Renew. Energy 2017, 107, 550–566. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Smart Energy Management System for Optimal Microgrid Economic Operation. IET Renew. Power Gener. 2011, 5, 258. [Google Scholar] [CrossRef]
- Faia, R.; Pinto, T.; Vale, Z.; Corchado, J.M.; Soares, J.; Lezama, F. Genetic Algorithms for Portfolio Optimization with Weighted Sum Approach. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence, Bangalore, India, 18–21 Novermber 2018; pp. 1823–1829. [Google Scholar] [CrossRef]
- Oliveira, D.Q.; Zambroni de Souza, A.C.; Almeida, A.B.; Lima, I. An Artificial Immune Approach for Service Restoration in Smart Distribution Systems. In Proceedings of the 2015 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT LATAM), Montevideo, Uruguay, 5–7 October 2015; pp. 1–6. [Google Scholar]
- Bellifemine, F.; Caire, G.; Greenwood, D. Developing Multi-Agent with JADE Systems; Wooldridge, M., Ed.; John Wiley & Sons: London, UK, 2007. [Google Scholar] [CrossRef]
- Bellifemine, F.; Caire, G.; Trucco, T.; Rimassa, G.; Mungenast, R. JADE Administrator’s Guide; TILab: Turin, Italy, 2010. [Google Scholar]
- RTI DDS. What Is DCPS? Available online: https://community.rti.com/static/documentation/connext-dds/5.2.0/doc/manuals/connext_dds/html_files/RTI_ConnextDDS_CoreLibraries_UsersManual/Content/UsersManual/What_is_DCPS_.htm (accessed on 15 June 2019).
- RTI DDS. Data Topics—What Is the Data Called? Available online: https://community.rti.com/static/documentation/connext-dds/5.2.0/doc/manuals/connext_dds/html_files/RTI_ConnextDDS_CoreLibraries_UsersManual/index.htm#UsersManual/Data_Topics___What_is_the_Data_Called_.htm%3FTocPath%3DPart%25201%253A%2520Introduction%7CDa (accessed on 15 June 2019).
- The Pennsylvania State Climatologist. 2018. Available online: http://climate.psu.edu/ (accessed on 22 June 2019).
- National Solar Radiation Data Base. 1991. Available online: https://rredc.nrel.gov/solar/old_data/nsrdb/1991-2010/hourly/siteonthefly.cgi?id=722020 (accessed on 22 June 2019).
- Salehi, V.; Mohamed, A.; Member, S.; Mazloomzadeh, A.; Mohammed, O.A. Laboratory-Based Smart Power System, Part I : Design and System Development. IEEE Trans. Smart Grid 2012, 3, 1394–1404. [Google Scholar] [CrossRef]
- Youssef, T.A.; Elsayed, A.T.; Mohammed, O.A. Data Distribution Service-Based Interoperability Framework for Smart Grid Testbed Infrastructure. Energies 2016, 9, 150. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Meaning of the Variable | Limit Values |
|---|---|---|
| Ppv | The predicted power generation of the PV system | 0 W ≤ Ppv ≤ 700 W |
| Pw | The predicted power generation of the wind turbine | 0 W ≤ Pw ≤ 1500 W |
| Pbat | The predicted charging or discharging power of the battery | −1500 W ≤ Pbat ≤ 1500 W |
| SOC | State of charge of the battery | 0.2 ≤ SOC ≤ 0.9 |
| Pl | Active power load | 0 W ≤ Pl ≤ 2700 W |
| Pcl | Controllable load | Pcl = 0.2 Pl |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harmouch, F.Z.; Ebrahim, A.F.; Esfahani, M.M.; Krami, N.; Hmina, N.; Mohammed, O.A. An Optimal Energy Management System for Real-Time Operation of Multiagent-Based Microgrids Using a T-Cell Algorithm. Energies 2019, 12, 3004. https://doi.org/10.3390/en12153004
Harmouch FZ, Ebrahim AF, Esfahani MM, Krami N, Hmina N, Mohammed OA. An Optimal Energy Management System for Real-Time Operation of Multiagent-Based Microgrids Using a T-Cell Algorithm. Energies. 2019; 12(15):3004. https://doi.org/10.3390/en12153004
Chicago/Turabian StyleHarmouch, Fatima Zahra, Ahmed F. Ebrahim, Mohammad Mahmoudian Esfahani, Nissrine Krami, Nabil Hmina, and Osama A. Mohammed. 2019. "An Optimal Energy Management System for Real-Time Operation of Multiagent-Based Microgrids Using a T-Cell Algorithm" Energies 12, no. 15: 3004. https://doi.org/10.3390/en12153004
APA StyleHarmouch, F. Z., Ebrahim, A. F., Esfahani, M. M., Krami, N., Hmina, N., & Mohammed, O. A. (2019). An Optimal Energy Management System for Real-Time Operation of Multiagent-Based Microgrids Using a T-Cell Algorithm. Energies, 12(15), 3004. https://doi.org/10.3390/en12153004