Current Control of the Permanent-Magnet Synchronous Generator Using Interval Type-2 T-S Fuzzy Systems

Abstract
1. Introduction
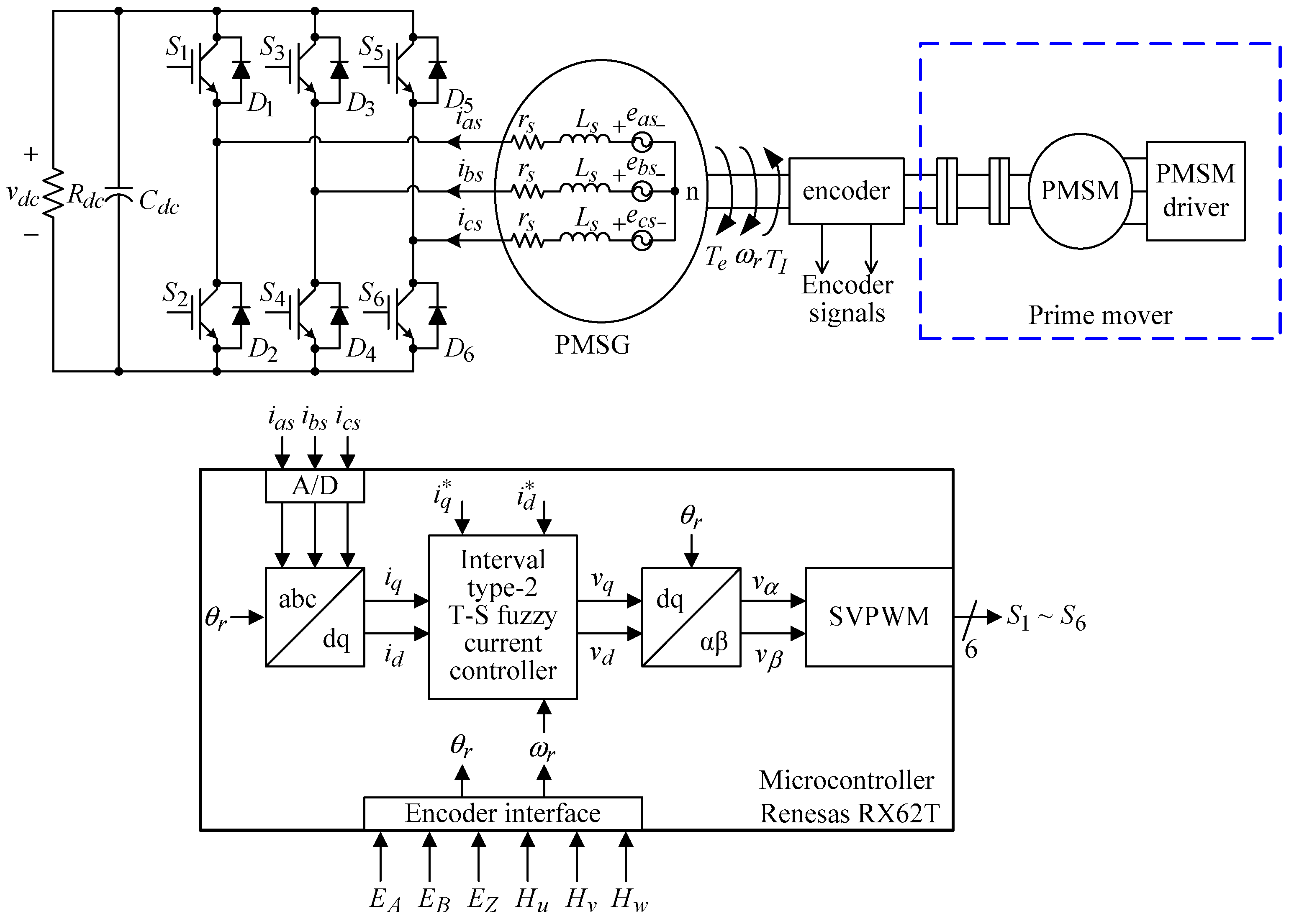
2. System Configuration and Dynamic Model
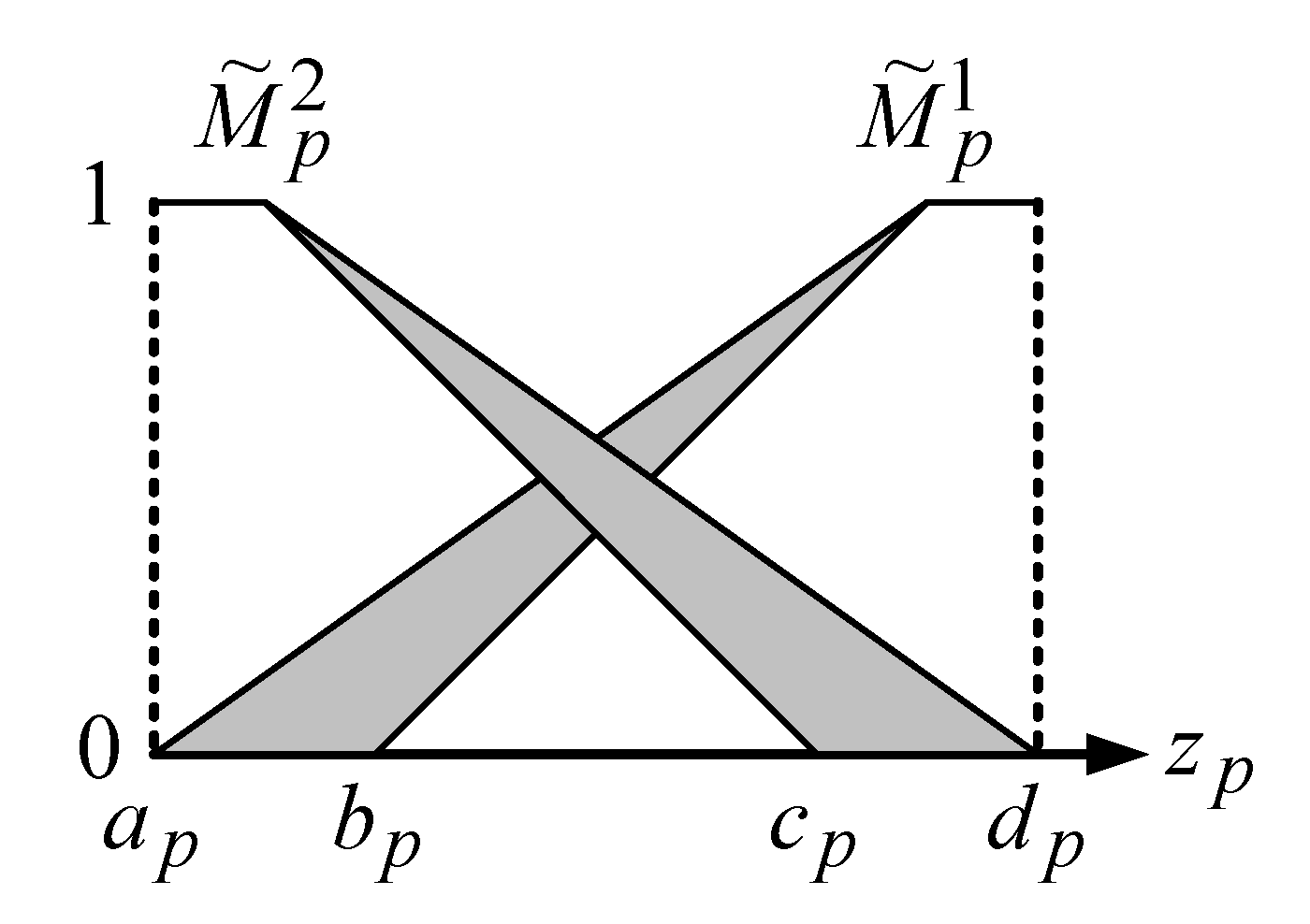
3. Design of the IT2 T-S Fuzzy Current Controller
4. Stability Analysis
5. Results and Discussions
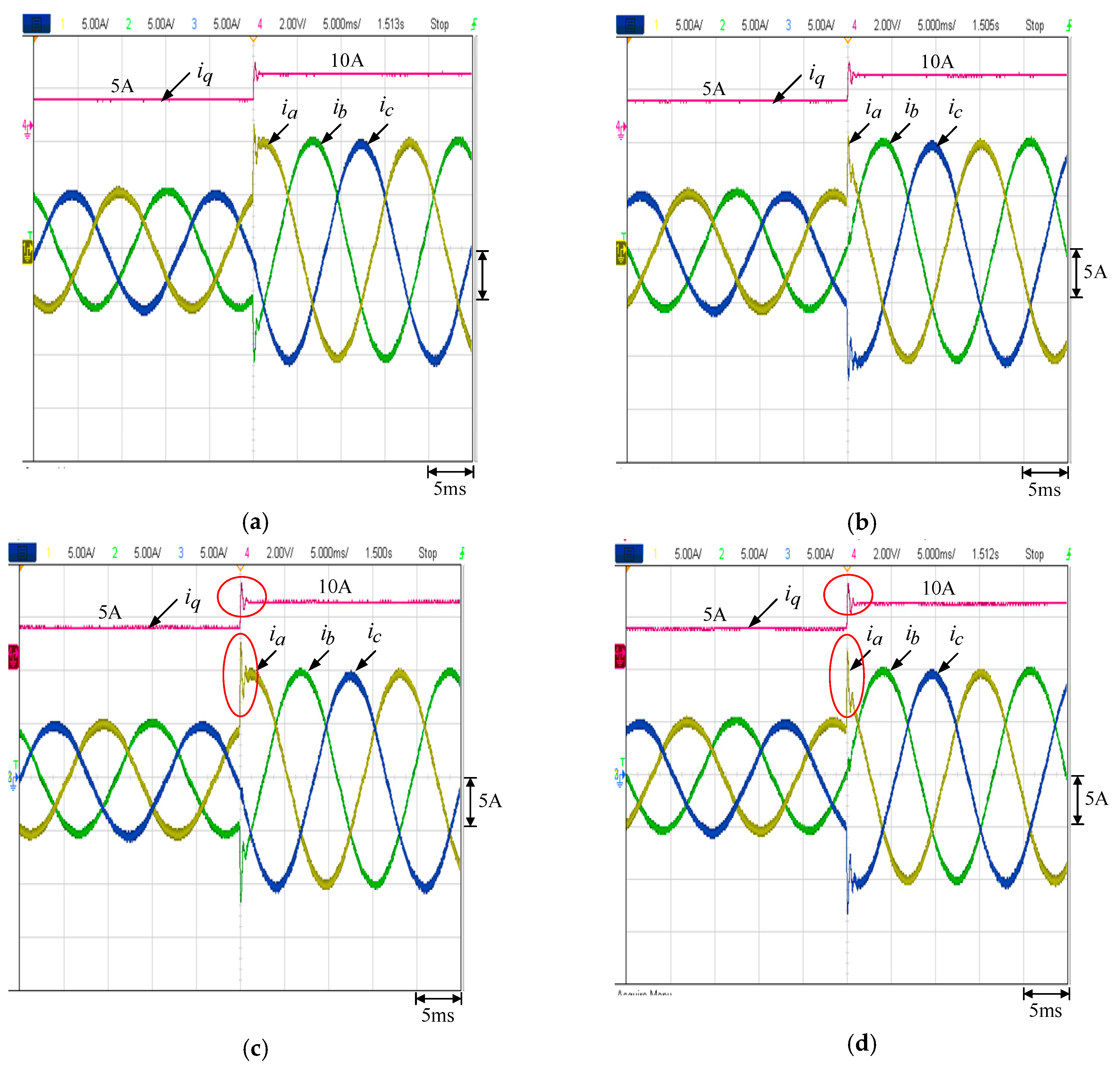
5.1. Constant Current Command
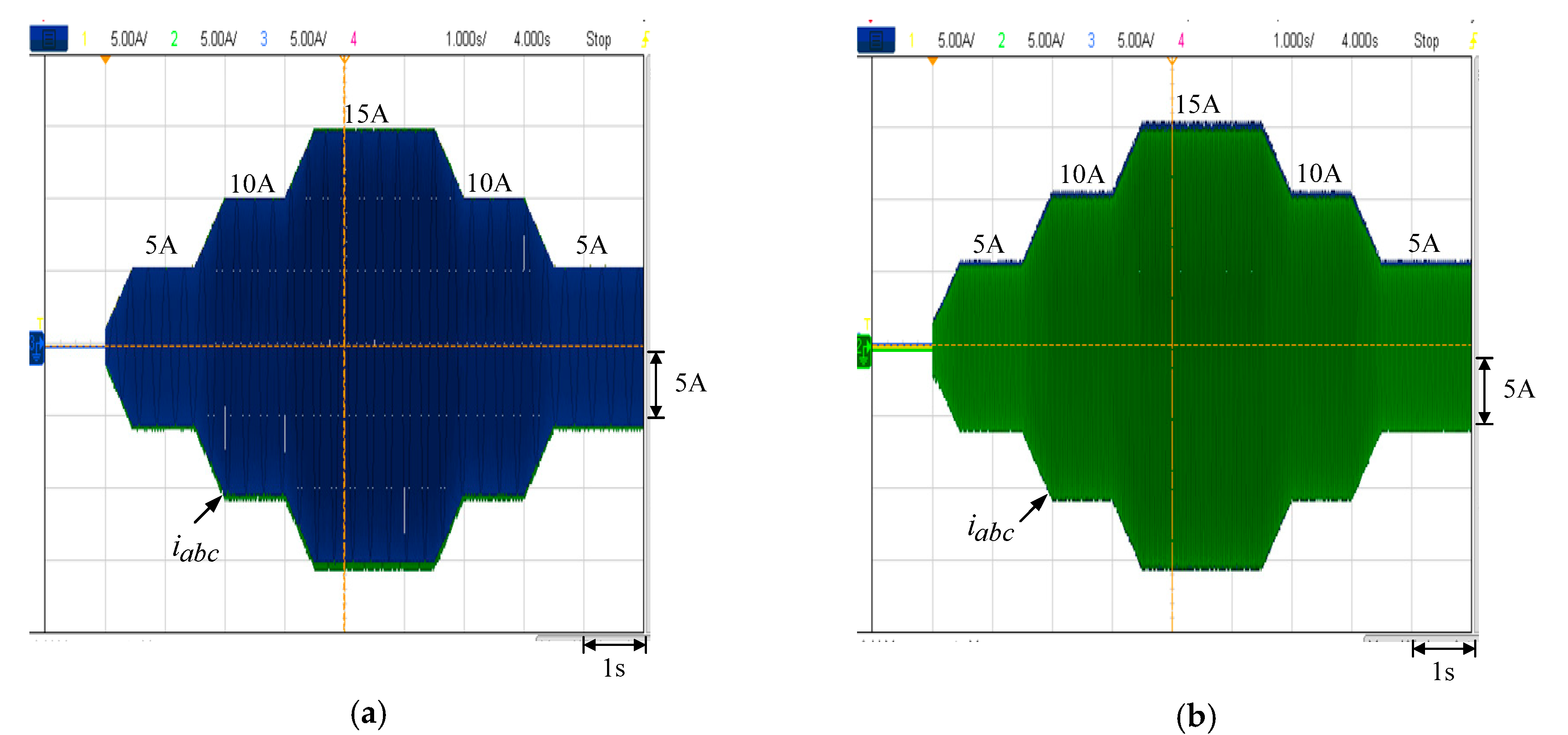
5.2. Variable Current Command
5.3. Calculation Time
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Krause, P.; Wasynczuk, O.; Sudhoff, S.; Pekarek, S. Analysis of Electric Machinery and Drive Systems, 3rd ed.; IEEE Press: Piscataway, NJ, USA, 2013; pp. 121–141. ISBN 9781118024294. [Google Scholar]
- Hong, J.; Lee, H.; Nam, K. Charging method for the secondary battery in dual-inverter drive systems for electric vehicles. IEEE Trans. Power Electron. 2015, 30, 909–921. [Google Scholar] [CrossRef]
- Lai, Y.S.; Lee, W.T.; Lin, Y.K.; Tsai, J.F. Integrated inverter/converter circuit and control technique of motor drives with dual-mode control for EV/HEV Applications. IEEE Trans. Power Electron. 2014, 29, 1358–1365. [Google Scholar] [CrossRef]
- Lee, K.W.; Park, S.; Jeong, S. A seamless transition control of sensorless PMSM compressor drives for improving efficiency based on a dual-mode operation. IEEE Trans. Power Electron. 2015, 30, 1446–1456. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Predictive control of a three-level boost converter and an NPC inverter for high-power PMSG-based medium voltage wind energy conversion systems. IEEE Trans. Power Electron. 2014, 29, 5308–5322. [Google Scholar] [CrossRef]
- García-Gracia, M.; Cova, M.A.; Villen, M.T.; Uson, A. Novel modular and retractable permanent magnet motor/generator for flywheel applications with reduced iron losses in stand-by mode. IET Renew. Power Gener. 2014, 8, 551–557. [Google Scholar] [CrossRef]
- Jung, E.; Yoo, H.; Sul, S.K.; Choi, H.S.; Choi, Y.Y. A nine-phase permanent-magnet motor drive system for an ultrahigh-speed elevator. IEEE Trans. Ind. Appl. 2016, 48, 987–995. [Google Scholar] [CrossRef]
- Reddy, P.B.; El-Refaie, A.M.; Huh, K.K. Effect of number of layers on performance of fractional-slot concentrated-windings interior permanent magnet machines. IEEE Trans. Power Electron. 2015, 30, 2205–2218. [Google Scholar] [CrossRef]
- Do, T.D.; Kwak, S.; Choi, H.H.; Jung, J.-W. Suboptimal control scheme design for interior permanent-magnet synchronous motors: An SDRE-Based approach. IEEE Trans. Power Electron. 2014, 29, 3020–3031. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Guglielmi, P.; Boazzo, B. Performance comparison between surface-mounted and interior PM motor drives for electric vehicle applications. IEEE Trans. Ind. Electron. 2012, 59, 803–811. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, K.; Blaabjerg, F. A simple startup strategy based on current regulation for back-EMF-based sensorless control of PMSM. IEEE Trans. Power Electron. 2012, 27, 3817–3825. [Google Scholar] [CrossRef]
- Jahns, T.M.; Soong, W.L. Pulsating torque minimization techniques for permanent magnet AC motor drives—A review. IEEE Trans. Ind. Electron. 1996, 43, 321–330. [Google Scholar] [CrossRef]
- Kim, K.C.; Lee, J.; Kim, H.J.; Koo, D.H. Multiobjective optimal design for interior permanent magnet synchronous motor. IEEE Trans. Magn. 2009, 45, 1780–1783. [Google Scholar] [CrossRef]
- Islam, R.; Husain, I.; Fardoun, A.; McLaughlin, K. Permanent-magnet synchronous motor magnet designs with skewing for torque tipple and cogging torque reduction. IEEE Trans. Ind. Appl. 2009, 45, 152–160. [Google Scholar] [CrossRef]
- Chang, Y.C.; Wang, S.Y.; Dai, W.F.; Chang, H.F. Division-summation current control and one-cycle voltage regulation of the surface-mounted permanent-magnet synchronous generator. IEEE Trans. Power Electron. 2016, 31, 1391–1400. [Google Scholar] [CrossRef]
- Hwang, J.-C.; Wei, H.-T. The current harmonics elimination control strategy for six-leg three-phase permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2014, 29, 3032–3040. [Google Scholar] [CrossRef]
- Chou, M.C.; Liaw, C.M. Development of robust current 2-DOF controllers for a permanent magnet synchronous motor drive with reaction wheel load. IEEE Trans. Power Electron. 2009, 24, 1304–1320. [Google Scholar] [CrossRef]
- Uddin, M.N.; Radwan, T.S.; George, G.H.; Rahman, M.A. Performance of current controllers for VSI-fed IPMSM drive. IEEE Trans. Ind. Appl. 2000, 36, 1531–1538. [Google Scholar]
- Liaw, C.M.; Kang, B.J. A robust hysteresis current-controlled PWM inverter for linear PMSM driven magnetic suspended positioning system. IEEE Trans. Ind. Electron. 2001, 48, 956–967. [Google Scholar] [CrossRef]
- Weigold, J.; Braun, M. Predictive current control using identification of current ripple. IEEE Trans. Ind. Electron. 2008, 55, 4346–4353. [Google Scholar] [CrossRef]
- Chang, Y.C.; Chen, C.H.; Zhu, Z.C.; Huang, Y.W. Speed control of the surface-mounted permanent-magnet synchronous motor based on Takagi-Sugeno fuzzy models. IEEE Trans. Power Electron. 2016, 31, 6504–6510. [Google Scholar] [CrossRef]
- Chang, Y.C.; Chang, H.C.; Huang, C.Y. Design and implementation of the permanent-magnet synchronous generator drive in wind generation systems. Energies 2018, 11, 1634. [Google Scholar] [CrossRef]
- Kamiński, M.; Corigliano, A. Numerical solution of the Duffing equation with random coefficients. Meccanica 2015, 50, 1841–1853. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M.; Liang, Q. Type-2 fuzzy logic systems. IEEE Trans. Fuzzy Syst. 1999, 7, 643–658. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval type-2 fuzzy logic systems made simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef]
- Lai, C.C. Design and Implementation of a Single-Phase Bidirectional Inverter Using Interval Type-2 T-S Fuzzy Control Systems. Master’s Thesis, National Chung Cheng University, Chiayi, Taiwan, 2016. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundaries | ap | bp | cp | dp | |
|---|---|---|---|---|---|
| Antecedent | |||||
| z1 | 0 A | 1.8 A | 17.1 A | 18.9 A | |
| z2 | 0 rad/sec | 76 rad/sec | 716 rad/sec | 792 rad/sec | |
| Poles | rs | Ld | Lq |
| 8 | 0.24 Ω | 1.896 mH | 2.131 mH |
| Rated Speed | Rated Torque | Rated Current | Rated Power |
| 1800 rpm | 23 N·m | 11.8 Arms | 4.5 kW |
| Rated power | 5 kW | DC-link voltage | 380 Vdc |
| Rated voltage | 220 Vrms | DC-link capacitance | 5600 µF |
| Rated current | 13.1 Arms | Switching frequency | 20 kHz |
| Generator Speed | Measured Current (A) | Error (%) | THD (%) |
|---|---|---|---|
| 600 rpm | 14.849 | 1.01 | 1.35 |
| 900 rpm | 15.179 | 1.19 | 1.20 |
| 1200 rpm | 15.368 | 2.45 | 1.50 |
| Step Position | Control System | Overshoot | Settling Time |
|---|---|---|---|
| Step occurs at 120° | IT1 T-S fuzzy | 2.375 A | 1.03 ms |
| IT2 T-S fuzzy | 2.25 A | 0.92 ms | |
| Step occurs at 60° | IT1 T-S fuzzy | 2.125 A | 1.12 ms |
| IT2 T-S fuzzy | 2.03 A | 1.03 ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, Y.-C.; Tsai, C.-T.; Lu, Y.-L. Current Control of the Permanent-Magnet Synchronous Generator Using Interval Type-2 T-S Fuzzy Systems. Energies 2019, 12, 2953. https://doi.org/10.3390/en12152953
Chang Y-C, Tsai C-T, Lu Y-L. Current Control of the Permanent-Magnet Synchronous Generator Using Interval Type-2 T-S Fuzzy Systems. Energies. 2019; 12(15):2953. https://doi.org/10.3390/en12152953
Chicago/Turabian StyleChang, Yuan-Chih, Chi-Ting Tsai, and Yong-Lin Lu. 2019. "Current Control of the Permanent-Magnet Synchronous Generator Using Interval Type-2 T-S Fuzzy Systems" Energies 12, no. 15: 2953. https://doi.org/10.3390/en12152953
APA StyleChang, Y.-C., Tsai, C.-T., & Lu, Y.-L. (2019). Current Control of the Permanent-Magnet Synchronous Generator Using Interval Type-2 T-S Fuzzy Systems. Energies, 12(15), 2953. https://doi.org/10.3390/en12152953