Online Parameter Identification and Joint Estimation of the State of Charge and the State of Health of Lithium-Ion Batteries Considering the Degree of Polarization

 ,
,
Abstract

1. Introduction
2. Online Identification of Battery Model Parameters
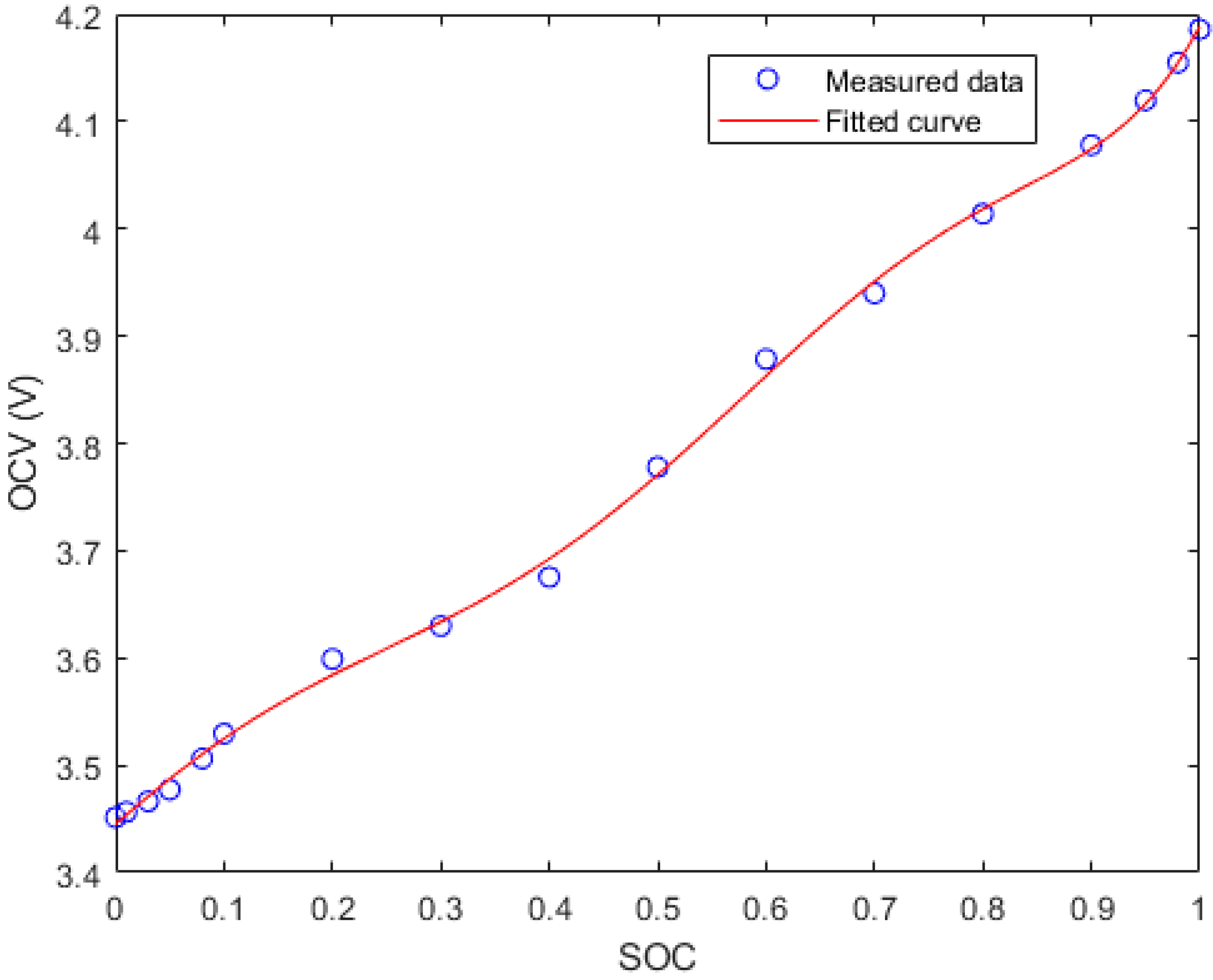
2.1. Battery Model Building and Offline Parameter Identification
2.2. Online Parameter Identification using Improved SAVPSO
3. Joint Algorithm for SOC/SOH Online Estimation
3.1. Application of UKF for SOC Estimation
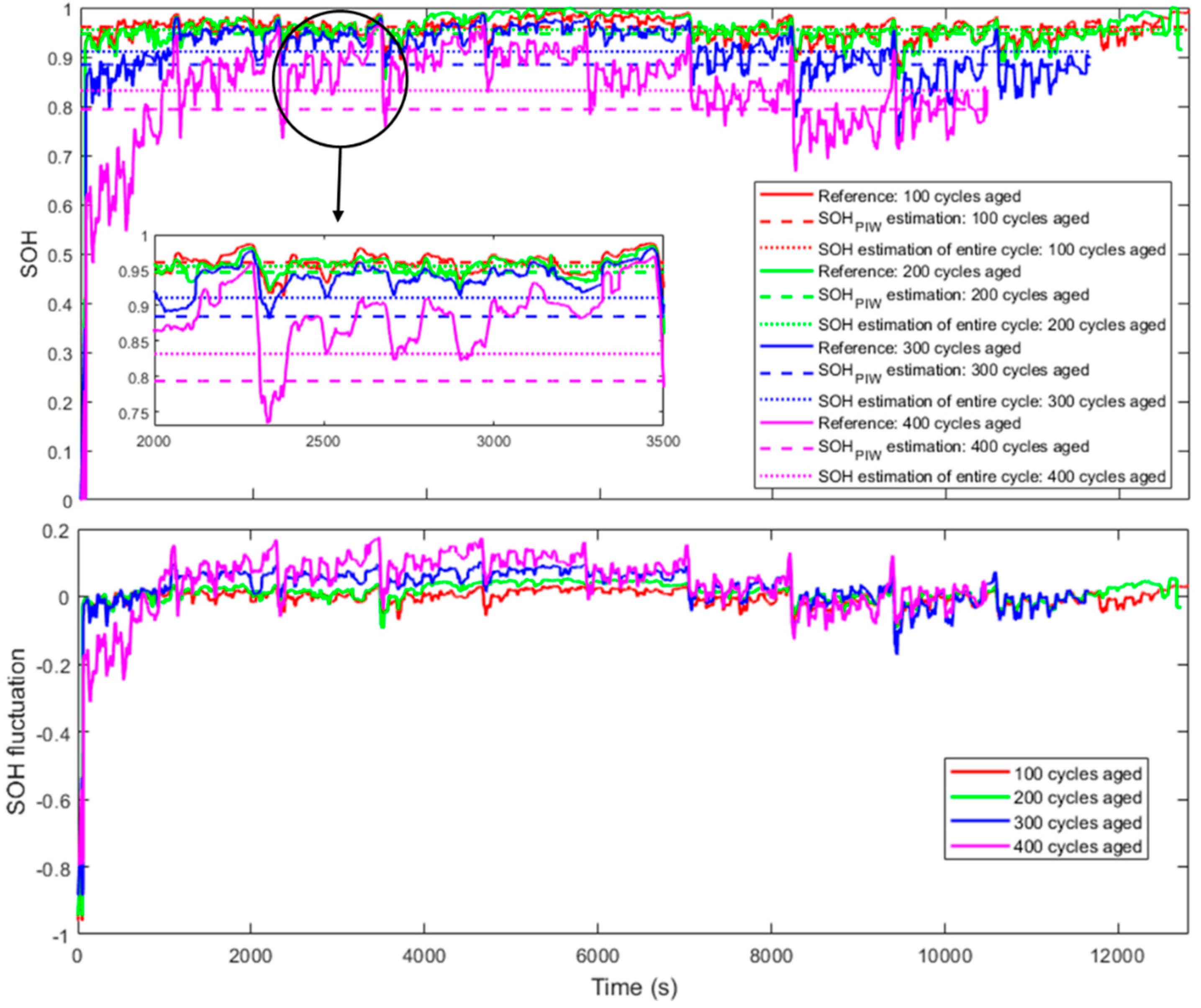
3.2. SOH Estimation Considering the Degree of Polarization
3.3. Design of the Joint Algorithm
4. Experiments and Discussion
4.1. Experiments Configuration
4.2. Estimation Results of Variable Temperature Combined Operating Condition Test
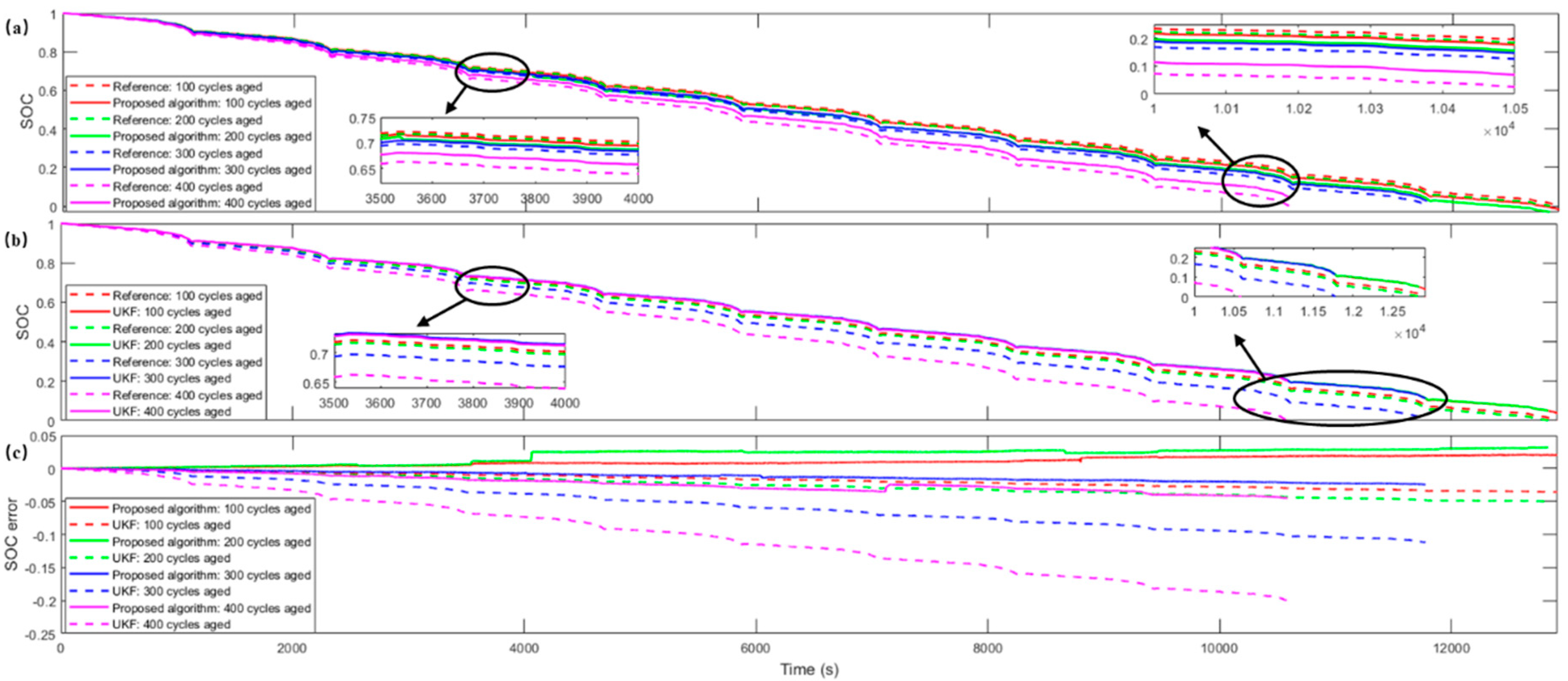
4.3. Estimation Results of the Constant Current Cyclic Aging and the NEDC Tests
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Cuma, M.U.; Koroglu, T. A comprehensive review on estimation strategies used in hybrid and battery electric vehicles. Renew. Sustain. Energy Rev. 2015, 42, 517–531. [Google Scholar] [CrossRef]
- Farmann, A.; Waag, W.; Marongiu, A.; Sauer, D.U. Critical review of on-board capacity estimation techniques for lithium-ion batteries in electric and hybrid electric vehicles. J. Power Sources 2015, 281, 114–130. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.; Ma, H.; Li, S.E. Combined State of Charge and State of Health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. State-of-Charge Estimation for Lead-acid Batteries Based on Dynamic Open-circuit Voltage. In Proceedings of the IEEE International Power & Energy Conference, Johor Bahru, Malaysia, 1–3 December 2008. [Google Scholar]
- Yatsui, M.W.; Bai, H. Kalman Filter Based State-of-Charge Estimation for Lithium-ion Batteries in Hybrid Electric Vehicles Using Pulse Charging. In Proceedings of the Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–5. [Google Scholar]
- Tian, Y.; Xia, B.; Sun, W.; Xu, Z.; Zheng, W. A modified model based state of charge estimation of power lithium-ion batteries using unscented Kalman filter. J. Power Sources 2014, 270, 619–626. [Google Scholar] [CrossRef]
- Zou, Z.; Xu, J.; Mi, C.; Cao, B.; Chen, Z. Evaluation of Model Based State of Charge Estimation Methods for Lithium-Ion Batteries. Energies 2014, 7, 5065–5082. [Google Scholar] [CrossRef]
- Yun, Z.; Zhang, C.; Zhang, X. State-of-charge estimation of the lithium-ion battery system with time-varying parameter for hybrid electric vehicles. IET Control Theory Appl. 2013, 8, 160–167. [Google Scholar]
- Zhou, F.; Wang, L.; Lin, H.; Lv, Z. High Accuracy State-of-Charge Online Estimation of EV/HEV Lithium Batteries Based on Adaptive Wavelet Neural Network. In Proceedings of the Ecce Asia Downunder, Melbourne, Australia, 3–6 June 2013. [Google Scholar]
- Shi, Q.; Zhang, C.; Cui, N.; Zhang, X. Battery State-of-Charge Estimation in Electric Vehicle Using Elman Neural Network Method. In Proceedings of the Control Conference, Beijing, China, 29–31 July 2010. [Google Scholar]
- Liu, R.H.; Sun, Y.K.; Ji, X.F. Battery State of Charge Estimation for Electric vehicle Based on Neural Network. In Proceedings of the International Conference on Information & Computer Networks, Xi′an, China, 27–29 May 2011. [Google Scholar]
- Xu, J.; Cao, B.; Zheng, C.; Zou, Z. An online state of charge estimation method with reduced prior battery testing information. Int. J. Electr. Power Energy Syst. 2014, 63, 178–184. [Google Scholar] [CrossRef]
- Hui, B.; Yang, Y. State of Charge Estimation for Electric Vehicle Batteries Based on LS-SVM. In Proceedings of the International Conference on Intelligent Human-machine Systems & Cybernetics, Hangzhou, China, 26–27 August 2013. [Google Scholar]
- Xia, B.; Chen, C.; Tian, Y.; Sun, W.; Xu, Z.; Zheng, W. A novel method for state of charge estimation of lithium-ion batteries using a nonlinear observer. J. Power Sources 2014, 270, 359–366. [Google Scholar] [CrossRef]
- Sepasi, S.; Roose, L.; Matsuura, M. Extended Kalman Filter with a Fuzzy Method for Accurate Battery Pack State of Charge Estimation. Energies 2015, 8, 5217–5233. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S.; Cho, B.H. Complementary Cooperation Algorithm Based on DEKF Combined With Pattern Recognition for SOC/Capacity Estimation and SOH Prediction. IEEE Trans. Power Electron. 2011, 27, 436–451. [Google Scholar] [CrossRef]
- Hu, Y.; Yurkovich, S. Battery State of Charge Estimation in Automotive Applications Using LPV Techniques. In Proceedings of the American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010. [Google Scholar]
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Fu, R.; Choe, S.Y.; Agubra, V.; Fergus, J. Modeling of degradation effects considering side reactions for a pouch type Li-ion polymer battery with carbon anode. J. Power Sources 2014, 261, 120–135. [Google Scholar] [CrossRef]
- Schmidt, A.P.; Bitzer, M.; Imre, Á.W.; Guzzella, L.J. Model-based distinction and quantification of capacity loss and rate capability fade in Li-ion batteries. J. Power Sources 2010, 195, 7634–7638. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.E.; Jia, Z.; Egardt, B. Enhanced sample entropy-based health management of Li-ion battery for electrified vehicles. Energy 2014, 64, 953–960. [Google Scholar] [CrossRef]
- Zheng, Y.; Han, X.; Lu, L.; Li, J.; Ouyang, M. Lithium ion battery pack power fade fault identification based on Shannon entropy in electric vehicles. J. Power Sources 2013, 223, 136–146. [Google Scholar] [CrossRef]
- Saha, B.; Kai, G.; Poll, S.; Christophersen, J. Measurement, Prognostics Methods for Battery Health Monitoring Using a Bayesian Framework. IEEE Trans. Instrum. Meas. 2009, 58, 291–296. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Delétage, J.Y.; Vinassa, J.M. Behavior and state-of-health monitoring of Li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Qiang, M.; Lei, X.; Cui, H.; Wei, L.; Pecht, M. Remaining useful life prediction of lithium-ion battery with unscented particle filter technique. Microelectron. Reliab. 2013, 53, 805–810. [Google Scholar]
- Sbarufatti, C.; Corbetta, M.; Giglio, M.; Cadini, F. Adaptive prognosis of lithium-ion batteries based on the combination of particle filters and radial basis function neural networks. J. Power Sources 2017, 344, 128–140. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G.J. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Zenati, A.; Desprez, P.; Razik, H.; Rael, S. A Methodology to Assess the State of Health of Lithium-ion Batteries Based on the Battery′s Parameters and a Fuzzy Logic System. In Proceedings of the Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012. [Google Scholar]
- Guha, A.; Patra, A. State of Health Estimation of Lithium-Ion Batteries Using Capacity Fade and Internal Resistance Growth Models. IEEE Trans. Transp. Electrif. 2017, 4, 135–146. [Google Scholar] [CrossRef]
- Xia, B.; Lao, Z.; Zhang, R.; Tian, Y.; Chen, G.; Sun, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M.; et al. Online Parameter Identification and State of Charge Estimation of Lithium-Ion Batteries Based on Forgetting Factor Recursive Least Squares and Nonlinear Kalman Filter. Energies 2018, 11, 3. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Empirical Study of Particle Swarm Optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Schweighofer, B.; Raab, K.M.; Brasseur, G. Modeling of high power automotive batteries by the use of an automated test system. IEEE Trans. Instrum. Meas. 2003, 52, 1087–1091. [Google Scholar] [CrossRef]
- Lu, H.; Chen, W.J. Self-adaptive velocity particle swarm optimization for solving constrained optimization problems. J. Glob. Optim. 2008, 41, 427–445. [Google Scholar] [CrossRef]
- Ghorai, J.K.; Susarla, V. Kernel estimation of a smooth distribution function based on censored data. Metrika 1990, 37, 71–86. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Classification | SOC Observer | Advantage | Disadvantage |
|---|---|---|---|
| Open-loop method | Coulomb counting [4] | Simple and fast computation. | Open-loop, sensitive to sensor error and initial SOC; large accumulated error. |
| Open circuit voltage method [5] | |||
| Adaptive filtering algorithm | Kalman filter [6] | Closed-loop, online observation; high accuracy with the accurate model parameters. | More calculations required than open-loop method; estimation results dependent on accuracy of the model parameters. |
| Unscented Kalman filter [7] | |||
| Levenberg observer [8] | |||
| H∞ filter [9] | |||
| Artificial intelligence algorithms | Neural network [12] | No need for accurate mathematical models; high estimation efficiency and good nonlinear estimation performance; online observation. | Sensitive to the quantity and quality of training data; the more comprehensive the training data, the higher the accuracy, but also more time-consuming. |
| Adaptive wavelet neural network [10] | |||
| Elman neural network [11] | |||
| Genetic algorithm [13] | |||
| Least square vector support vector machine [14] | |||
| Nonlinear observation algorithm | Nonlinear observer [15] | Good convergence performance; high robust performance; fast and online observation. | Estimation results dependent on the accuracy of the model parameters. |
| PI observer [8] | |||
| Sliding mode observer [8] | |||
| Other algorithm (including joint algorithm) | Linear parameter variation system technology [18] | High accuracy; high robust performance; good nonlinear estimation performance. | Large amount of calculation; complicated and difficult implementation process. |
| Fuzzy logic extended Kalman filter [16] |
| Method Classification | SOH Estimation Method | Advantage | Disadvantage |
|---|---|---|---|
| Internal aging mechanism identification | Incremental capacity and differential voltage curves identification [19] | Comprehensive understanding of aging mechanism; direct reflection of degradation of internal physical and chemical processes during battery aging. | Difficult to configure key parameters and long calculation time; most used to analyze the aging mechanism of batteries. |
| SEM analysis of cycled battery cells [20] | |||
| Parameters accounting for electrolyte conductivity [21] | |||
| External characteristic parameter identification | Sample entropy calculation [22] | Direct use of charge and discharge test curves for battery capacity and internal resistance identification. | Based on numerous experiments, need for complete charge and discharge curves or OCV curve, and certain limitations in practical applications. |
| Shannon entropy calculation and modeling by least squares algorithm [23] | |||
| Bayesian learning (RVM–PF) framework [24] | |||
| Impedance spectroscopy and recurrent neural networks [25] | Considers specific operational conditions and provides practical information on the expected life of the battery online. | High cost of the impedance spectrum equipment and harsh test conditions; difficulty in parameter identification. | |
| Dual extended Kalman filter [17] | High computational efficiency and accuracy; easy for online application. | Estimation results dependent on the accuracy of the model parameters. | |
| Unscented particle filter [26] | |||
| Particle filters and radial basis function neural networks [27] | Effective online estimation of capacity and internal resistance; good nonlinear estimation performance. | Data-driven method; sensitive to the quantity and quality of training data. | |
| Support vector machine [28] | |||
| Fuzzy logic algorithm [29] |
| −0.02778 | 1.011 |
| 0.0367 | 0.0183 | 3768.0211 |
| Aging Cycles | Mean Error of Proposed Method | Mean Error of UKF | Maximum Error of Proposed Method | Maximum Error of UKF |
|---|---|---|---|---|
| 100 | 1.02% | 1.78% | 2.06% | 3.58% |
| 200 | 1.94% | 2.58% | 3.17% | 4.99% |
| 300 | 1.19% | 5.60% | 2.44% | 11.20% |
| 400 | 2.22% | 9.83% | 4.51% | 20.03% |
| Aging Cycles | 100 | 200 | 300 | 400 |
|---|---|---|---|---|
| SOH error of entire cycle | 0.58% | 0.87% | 2.64% | 3.82% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, B.; Chen, G.; Zhou, J.; Yang, Y.; Huang, R.; Wang, W.; Lai, Y.; Wang, M.; Wang, H. Online Parameter Identification and Joint Estimation of the State of Charge and the State of Health of Lithium-Ion Batteries Considering the Degree of Polarization. Energies 2019, 12, 2939. https://doi.org/10.3390/en12152939
Xia B, Chen G, Zhou J, Yang Y, Huang R, Wang W, Lai Y, Wang M, Wang H. Online Parameter Identification and Joint Estimation of the State of Charge and the State of Health of Lithium-Ion Batteries Considering the Degree of Polarization. Energies. 2019; 12(15):2939. https://doi.org/10.3390/en12152939
Chicago/Turabian StyleXia, Bizhong, Guanghao Chen, Jie Zhou, Yadi Yang, Rui Huang, Wei Wang, Yongzhi Lai, Mingwang Wang, and Huawen Wang. 2019. "Online Parameter Identification and Joint Estimation of the State of Charge and the State of Health of Lithium-Ion Batteries Considering the Degree of Polarization" Energies 12, no. 15: 2939. https://doi.org/10.3390/en12152939
APA StyleXia, B., Chen, G., Zhou, J., Yang, Y., Huang, R., Wang, W., Lai, Y., Wang, M., & Wang, H. (2019). Online Parameter Identification and Joint Estimation of the State of Charge and the State of Health of Lithium-Ion Batteries Considering the Degree of Polarization. Energies, 12(15), 2939. https://doi.org/10.3390/en12152939