Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches

 ,
, 
 , and
, and 
Abstract
:1. Introduction
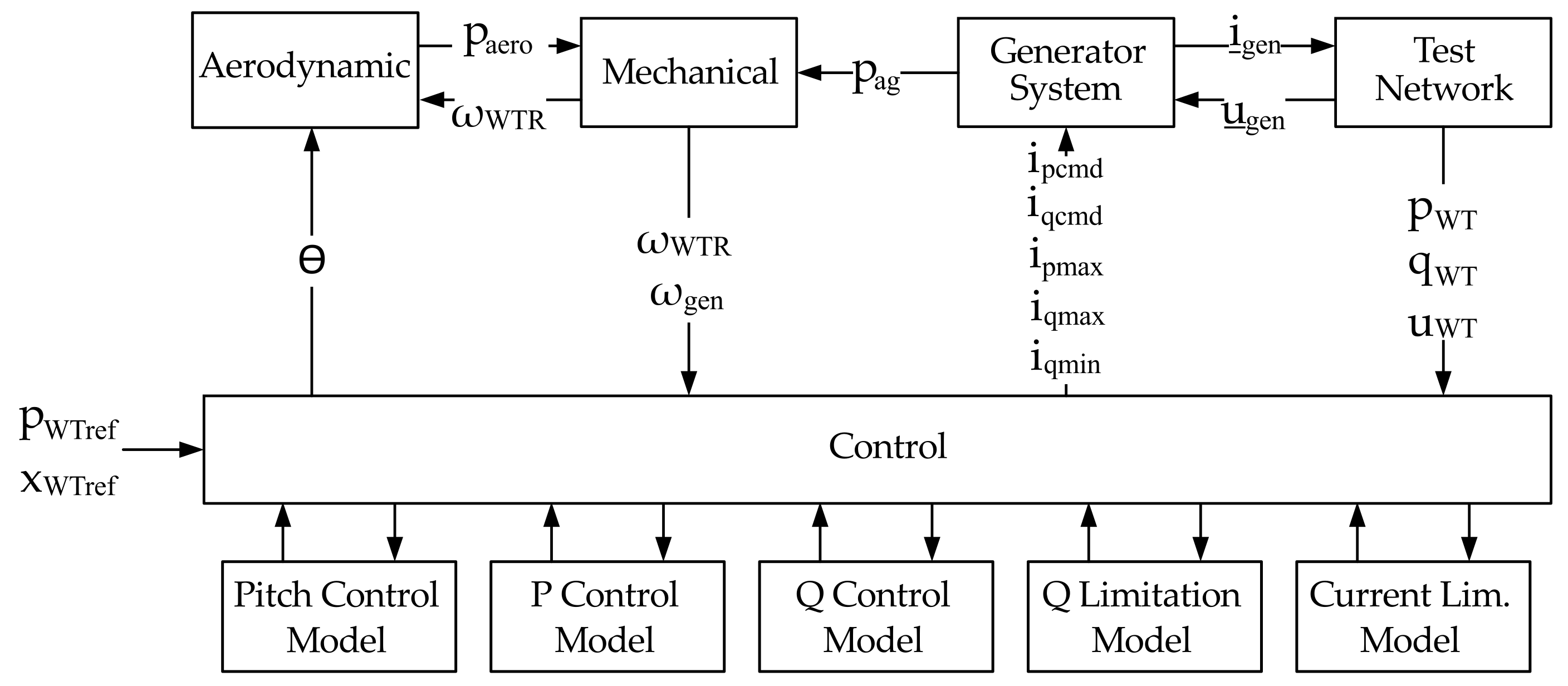
2. IEC 61400-27-1 Generic Type 3 WT Model
2.1. Validation of Generic Models Based on IEC 61400-27-1 Guidelines
3. Modeling Process of Generic Type 3 WT
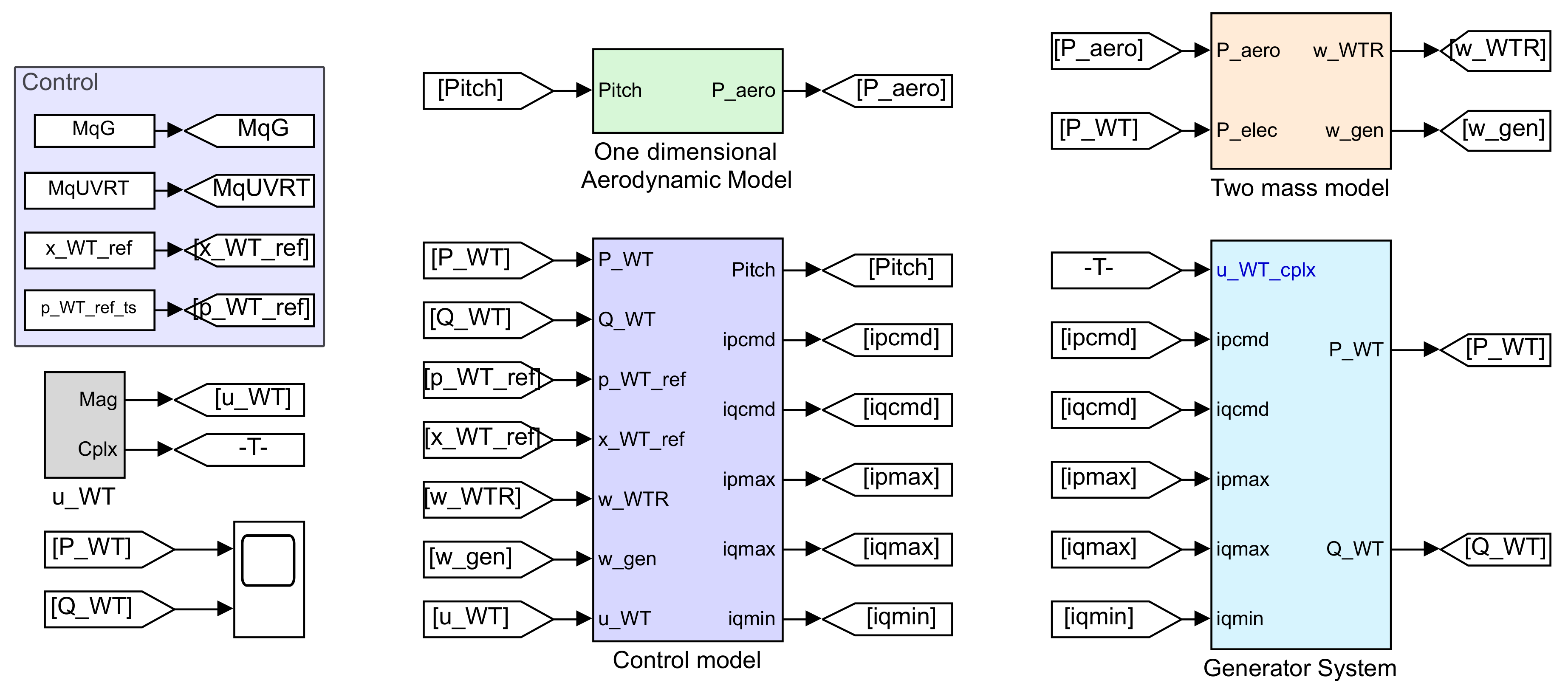
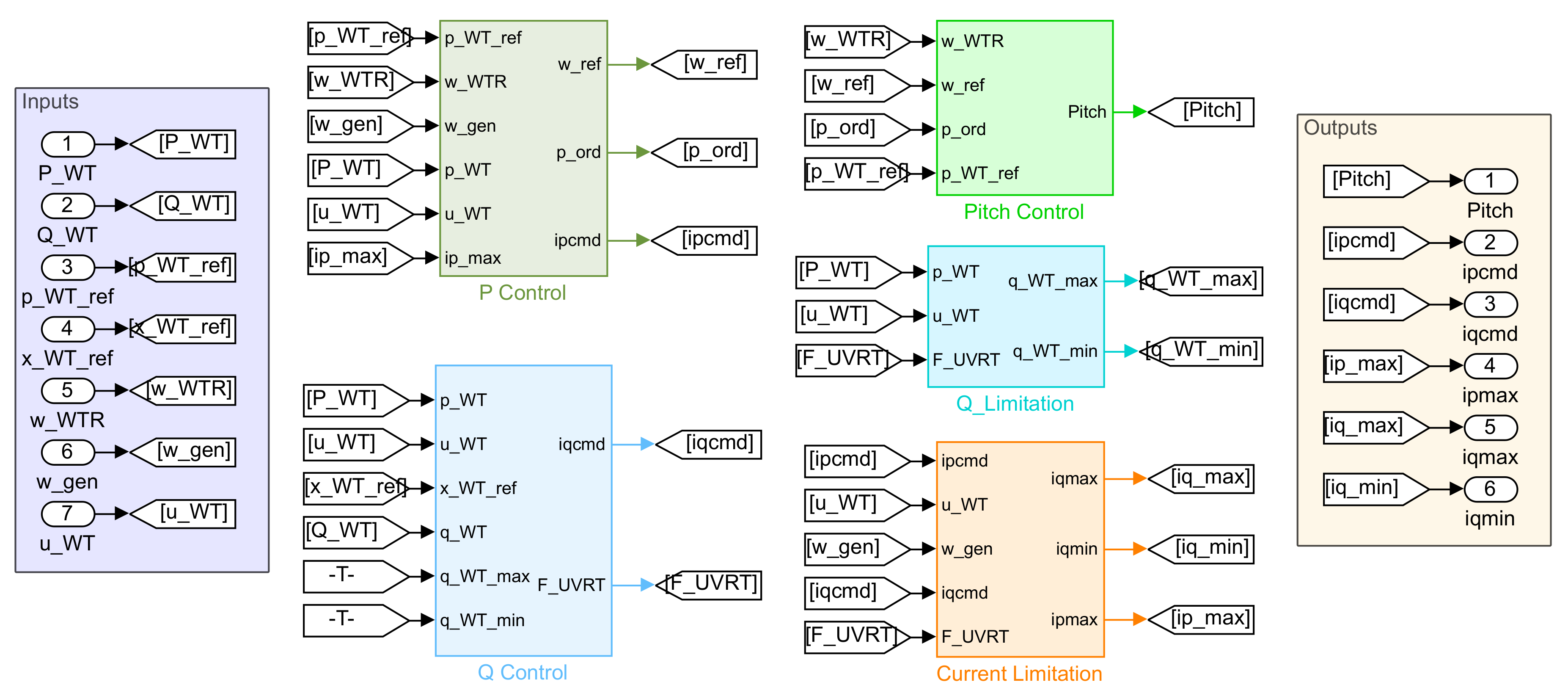
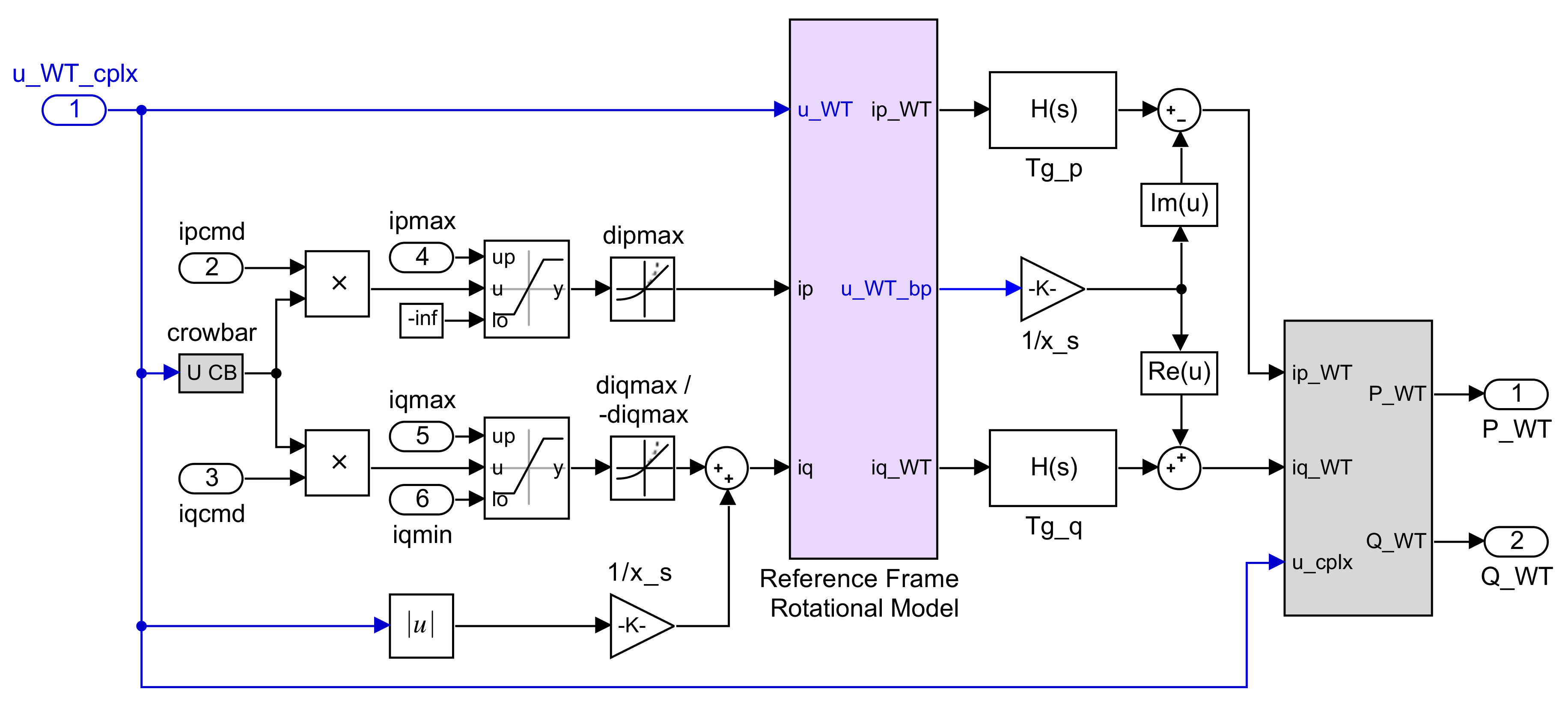
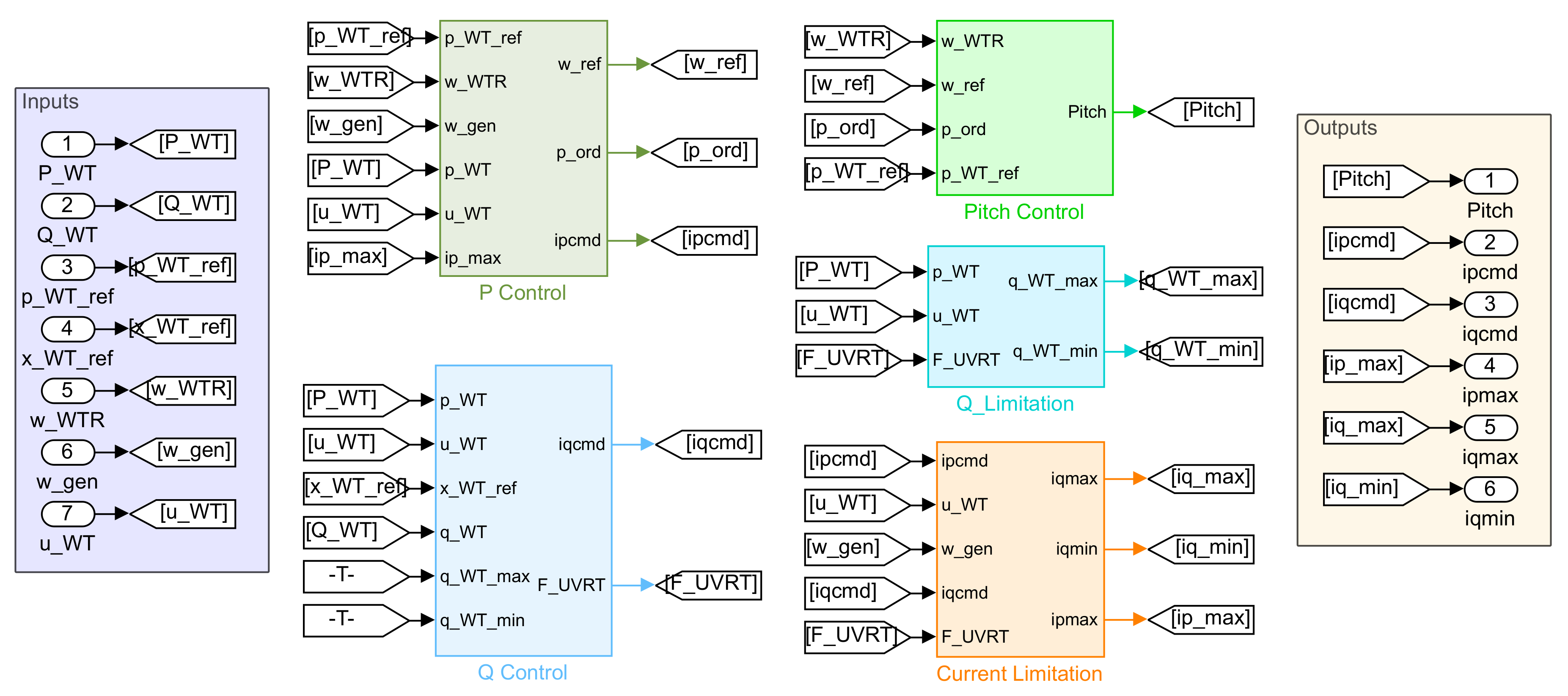
3.1. Implementation in MATLAB/Simulink
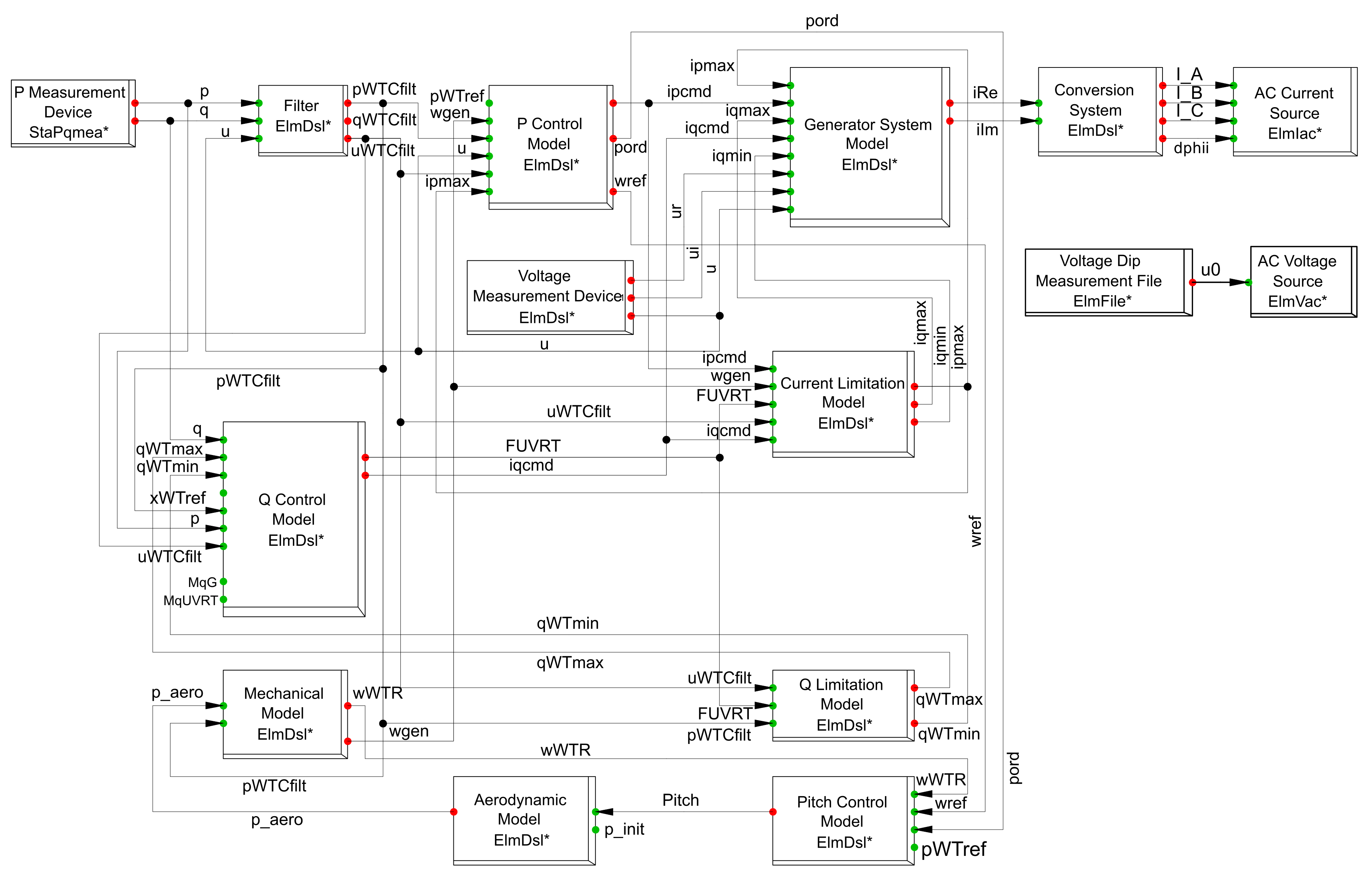
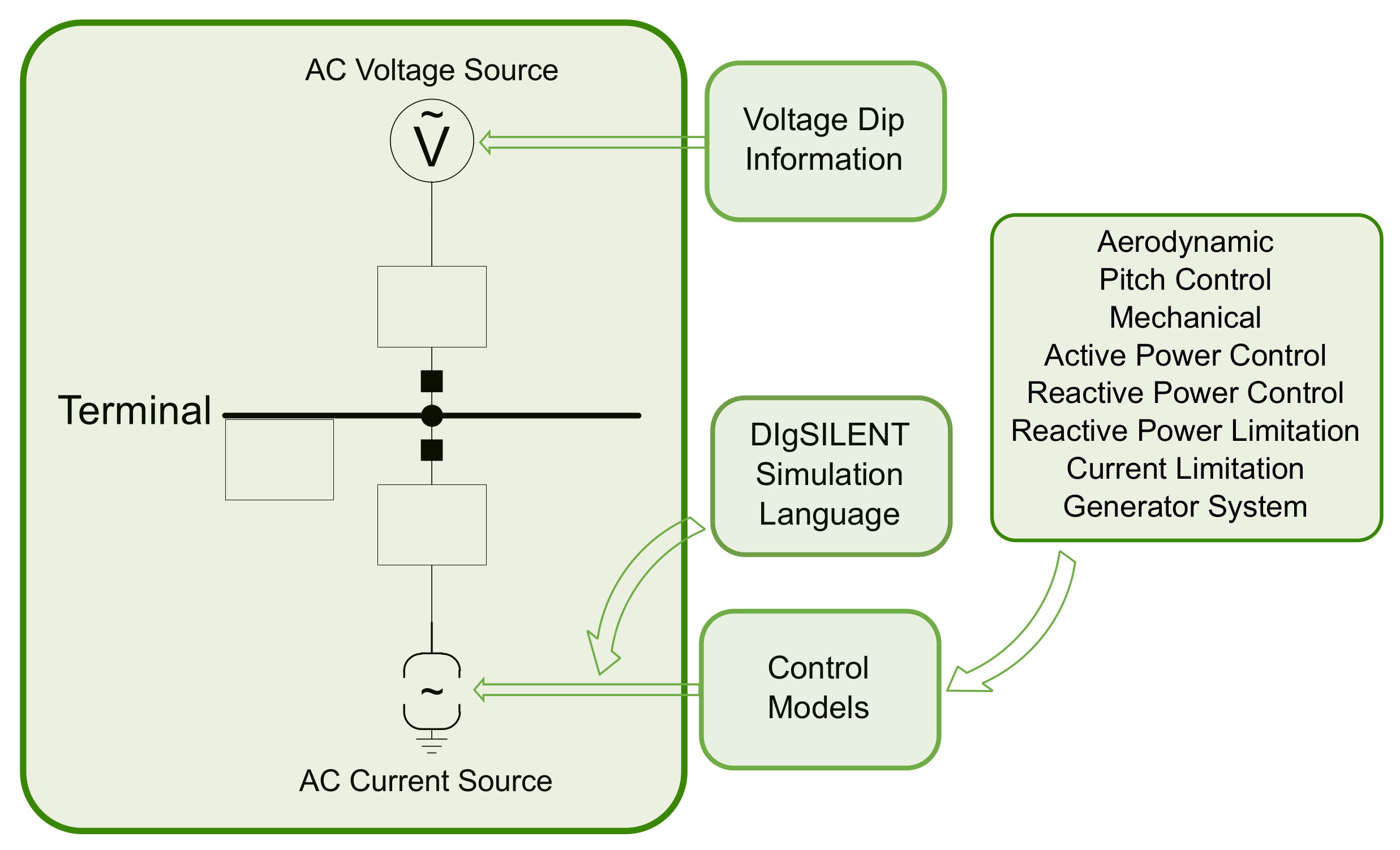
3.2. Implementation in DIgSILENT-PowerFactory
3.2.1. DIgSILENT Simulation Language
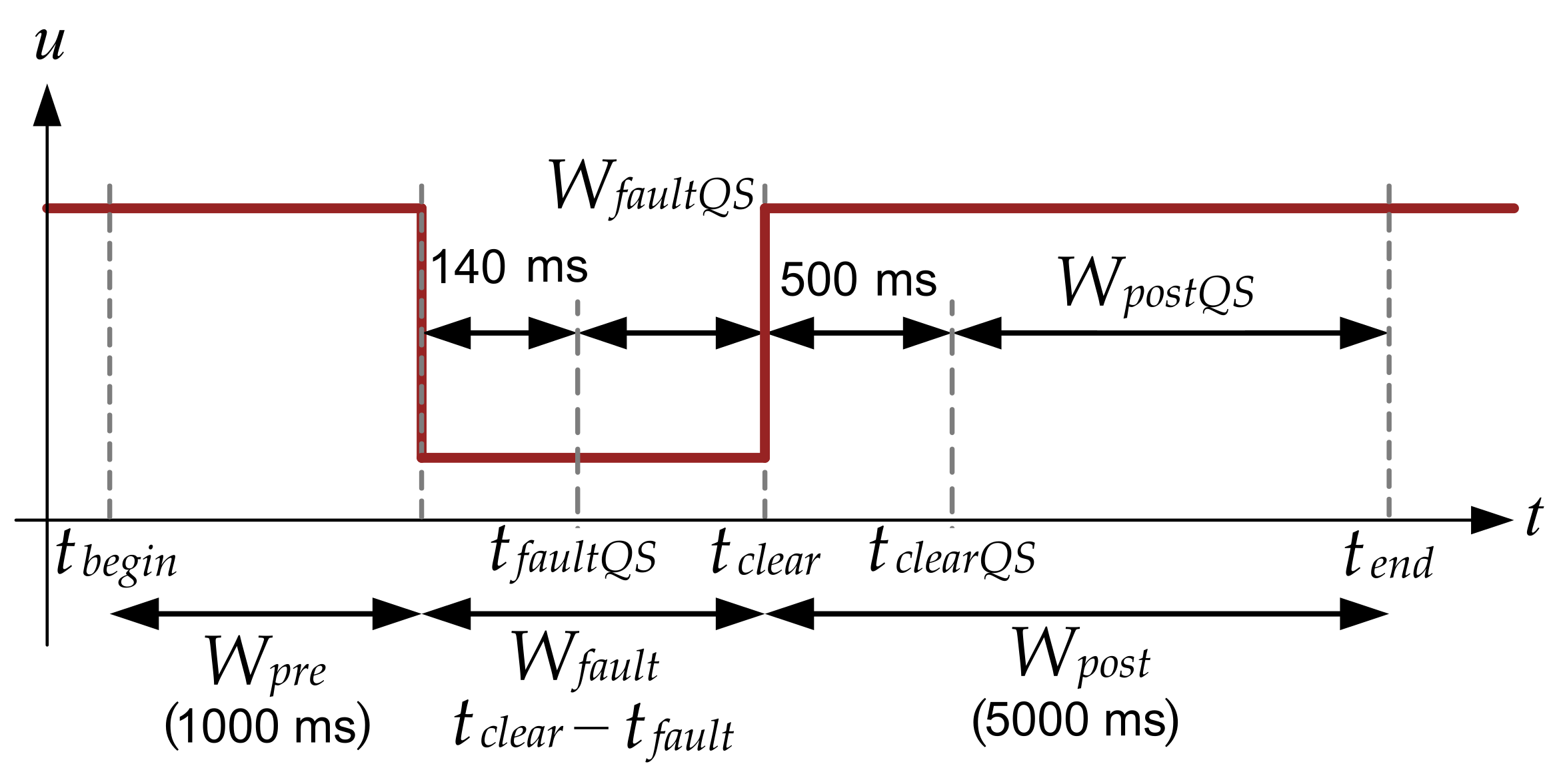
3.2.2. Time Domain Simulations in DIgSILENT-PowerFactory
3.2.3. Conduction of Voltage Dips at the WTTs
3.2.4. Test Network
4. Results
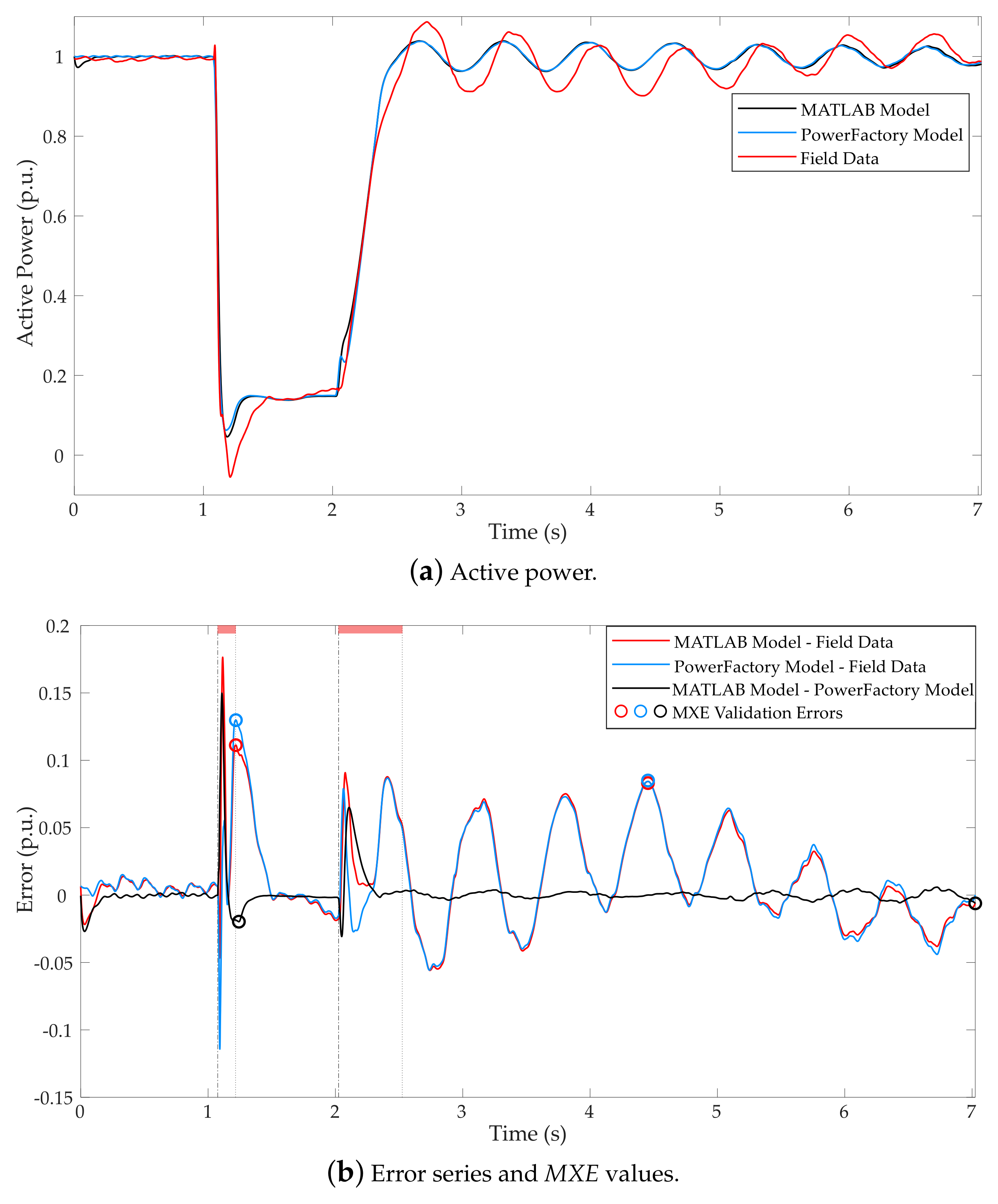
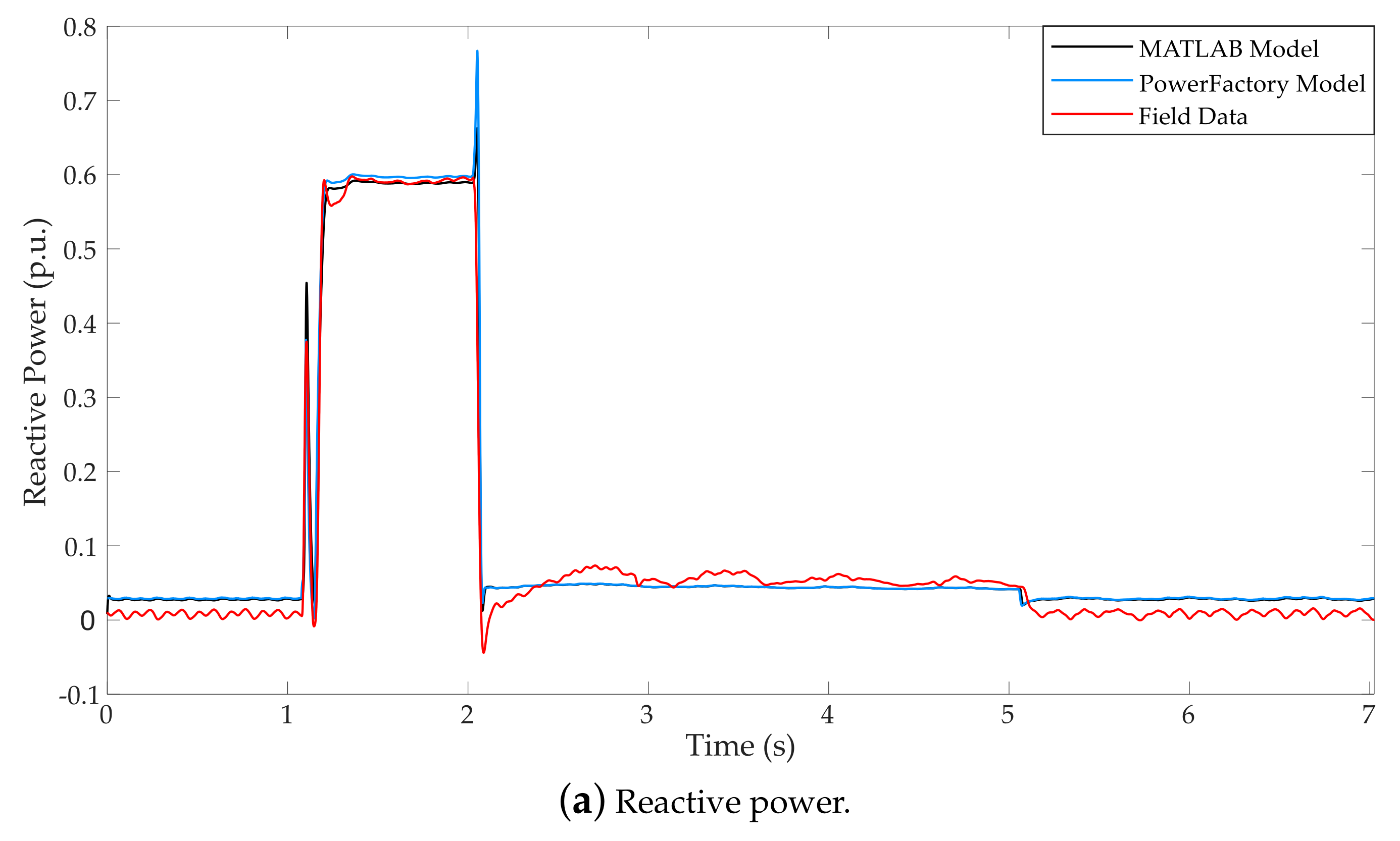
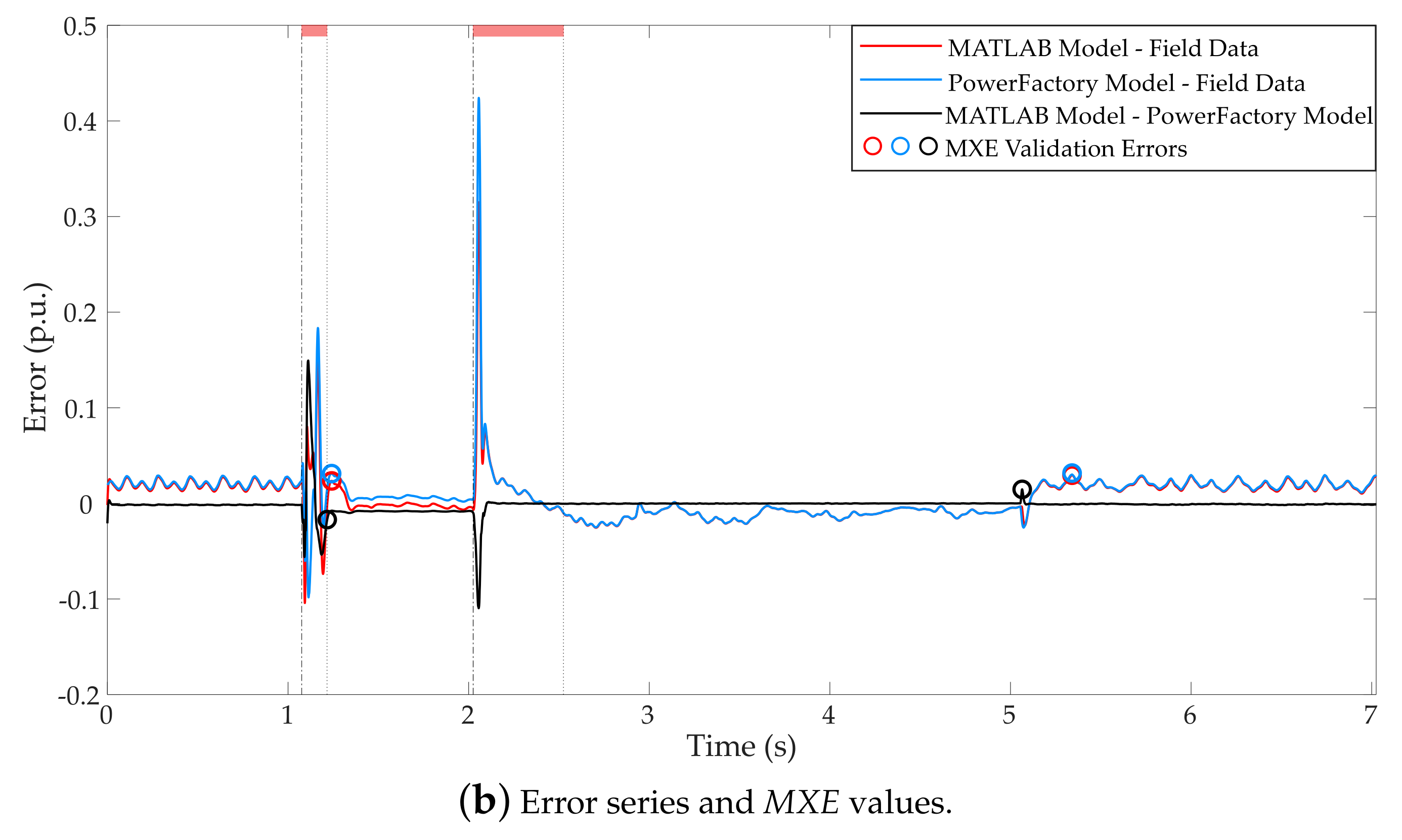
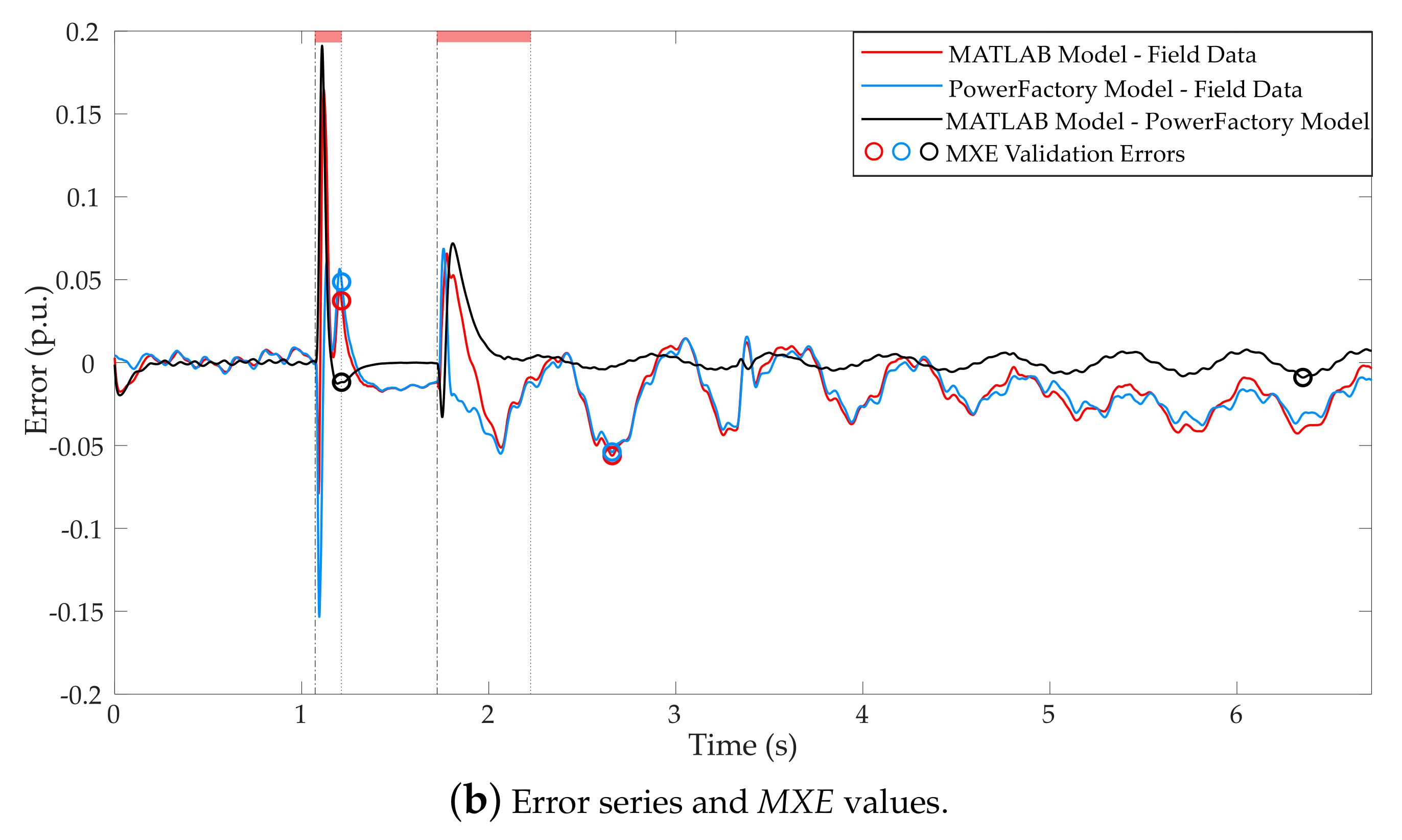
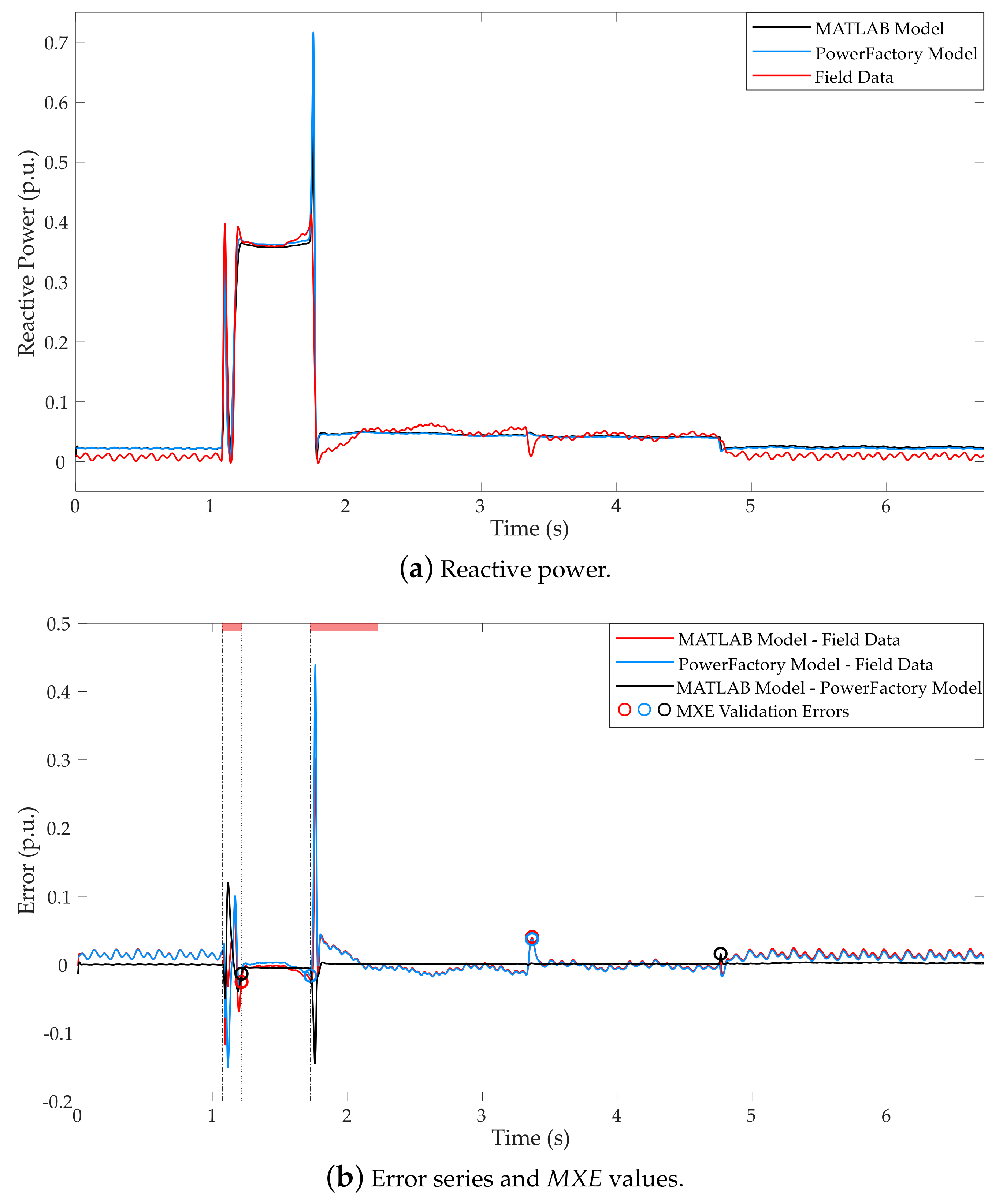
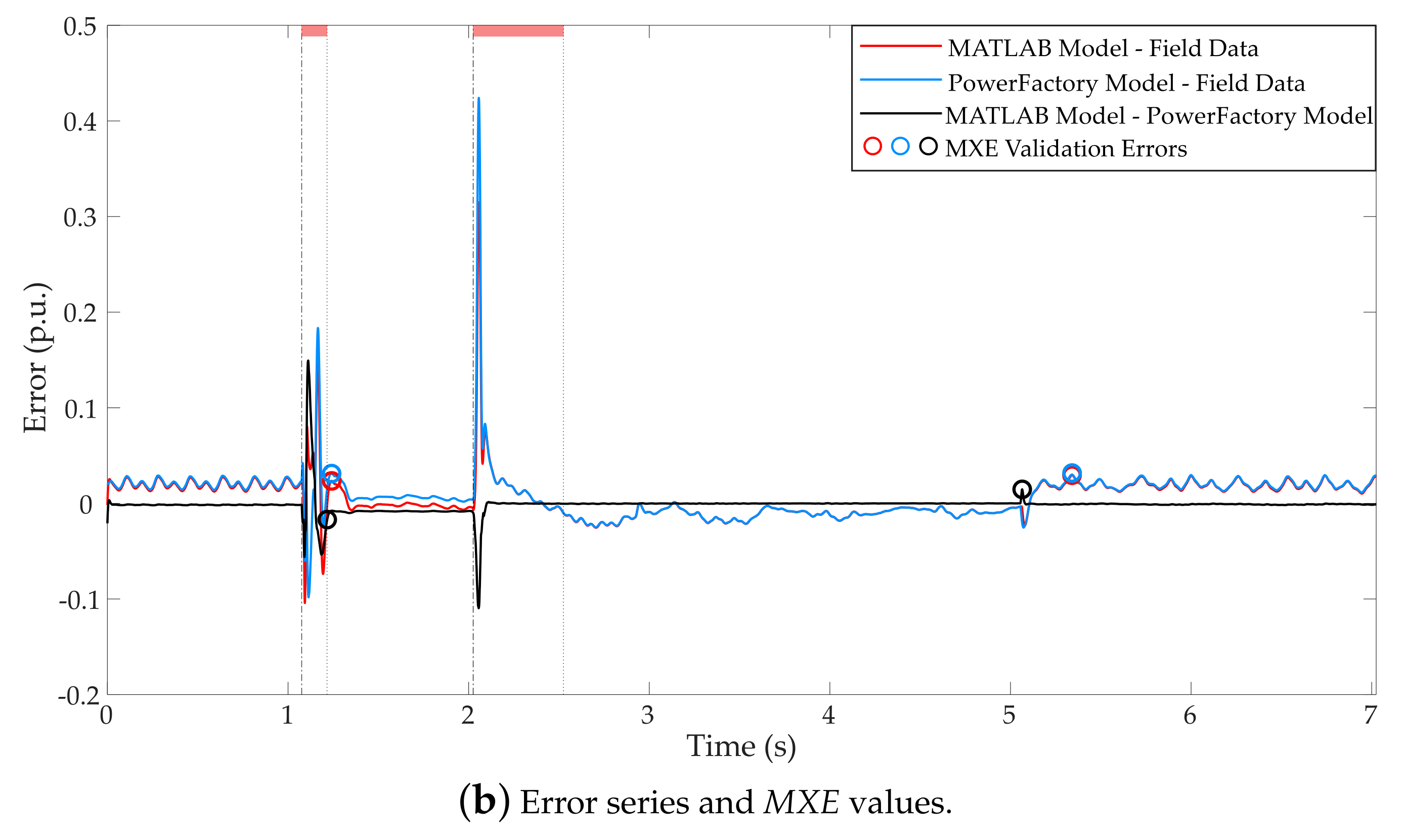
4.1. Validation of the Generic Type 3 WT Model
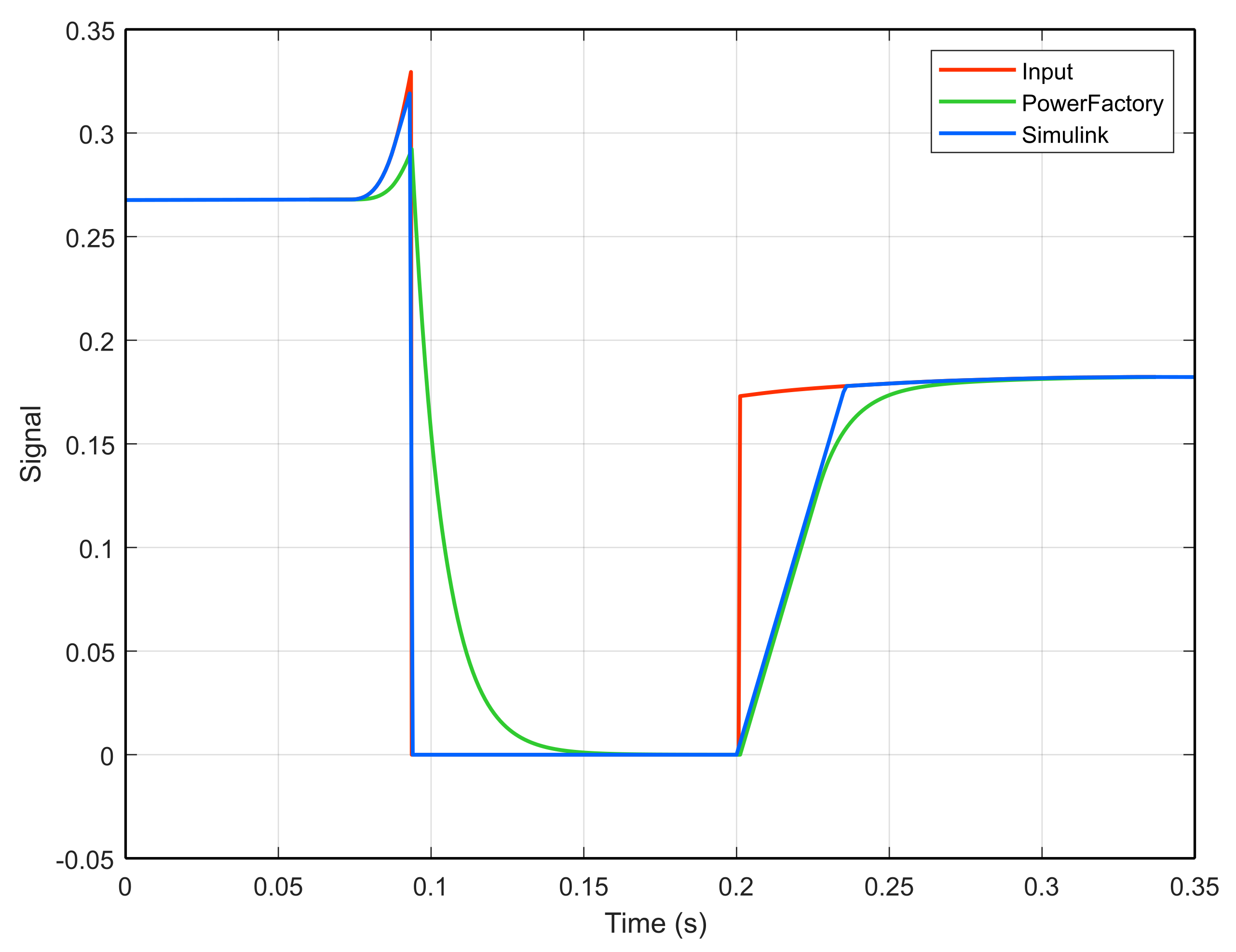
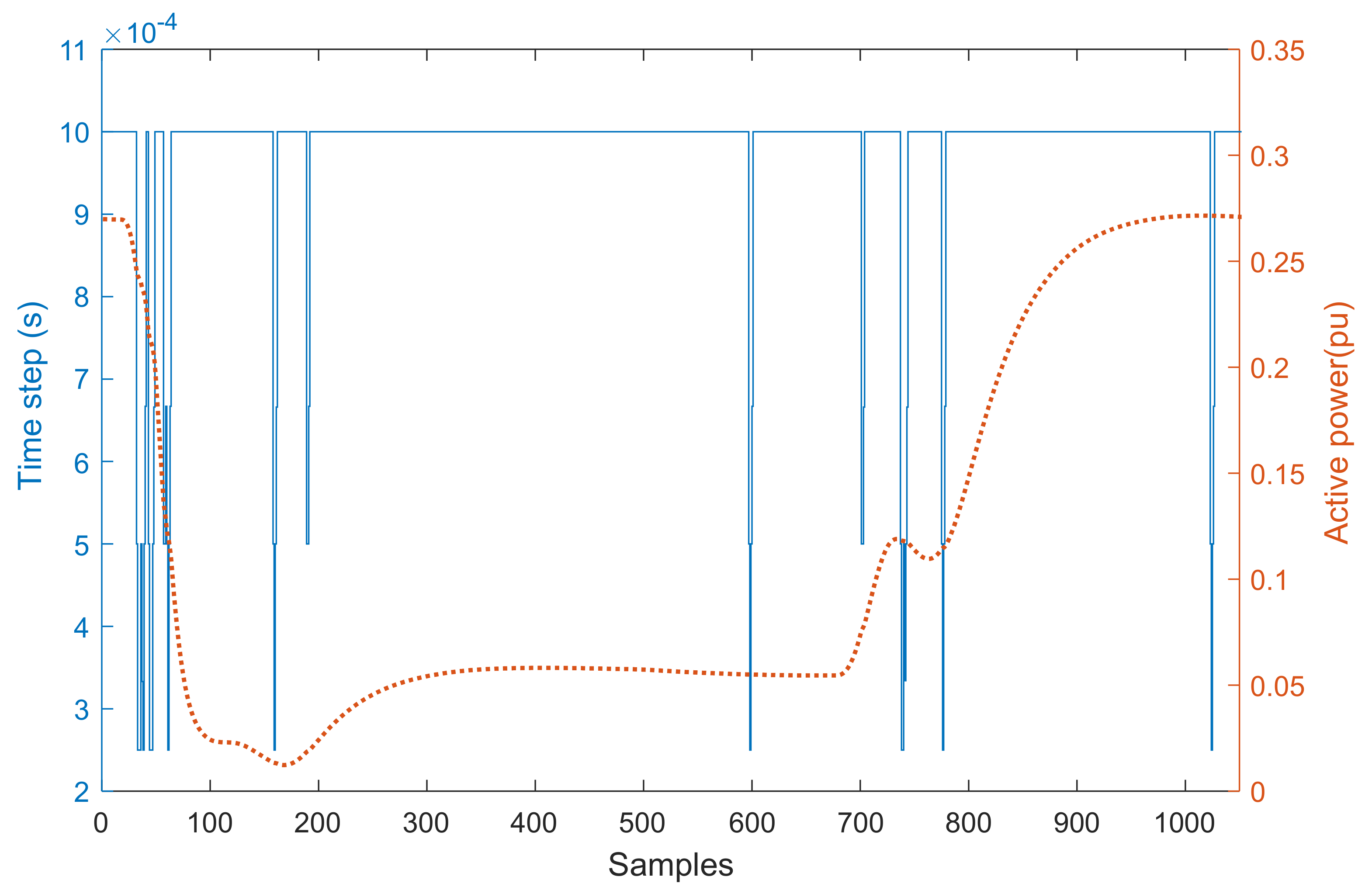
4.2. Analysis of the Limitations of the Software Tools: Causes of the Differences in the Simulated Response
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| DC | Direct Current |
| DFIG | Doubly-Fed Induction Generator |
| DSL | DIgSILENT Simulation Language |
| DSO | Distribution System Operator |
| GWEC | Global Wind Energy Council |
| IEA | International Energy Agency |
| IEC | International Electrotecnical Commission |
| MAE | Mean Absolute Error |
| ME | Mean Error |
| MXE | Maximum Absolute Error |
| PF | DIgSILENT-PowerFactory |
| PV | Photovoltaics |
| RMS | Root Mean Square |
| TSO | Transmission System Operator |
| WPP | Wind Power Plant |
| WT | Wind Turbine |
| WTT | Wind Turbine Terminals |
References
- IEA. Renewables 2018. Analysis and Forecasts for 2023; Technical Report; International Energy Agency: Paris, France, 2018. [Google Scholar]
- GWEC. Global Wind Statistics 2017; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2018. [Google Scholar]
- EWEA. Wind Energy in Europe in 2018. Trends and Statistics; Technical Report; European Wind Energy Association: Brussels, Belgium, 2018. [Google Scholar]
- EWEA. Wind Energy in Europe: Scenarios for 2030; Technical Report; European Wind Energy Association: Brussels, Belgium, 2017. [Google Scholar]
- Honrubia-Escribano, A.; Gomez-Lazaro, E.; Fortmann, J.; Sørensen, P.; Martin-Martinez, S. Generic dynamic wind turbine models for power system stability analysis: A comprehensive review. Renew. Sustain. Energy Rev. 2018, 81, 1939–1952. [Google Scholar] [CrossRef]
- Fortmann, J.; Miller, N.; Kazachkov, Y.; Bech, J.; Andresen, B.; Pourbeik, P.; Sørensen, P. Wind Plant Models in IEC 61400-27-2 and WECC-latest developments in international standards on wind turbine and wind plant modeling. In Proceedings of the 14th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, Brussels, Belgium, 20–22 October 2015; p. 5. [Google Scholar]
- Villena-Ruiz, R.; Jiménez-Buendía, F.; Honrubia-Escribano, A.; Molina-García, Á.; Gómez-Lázaro, E. Compliance of a Generic Type 3 WT Model with the Spanish Grid Code. Energies 2019, 12, 1631. [Google Scholar] [CrossRef]
- IEC 61400-27-1. Electrical Simulation Models-Wind Turbines; IEC: Geneva, Switzerland, 2015. [Google Scholar]
- Sørensen, P.; Andersen, B.; Fortmann, J.; Johansen, K.; Pourbeik, P. Overview, Status and Outline of the New IEC 61400-27—Electrical Simulation Models for Wind Power Generation. In Proceedings of the 10th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Farms, Roskilde, Denmark, 25–26 October 2011; p. 6. [Google Scholar]
- Fortmann, J. Modeling of Wind Turbines with Doubly Fed Generator System. Ph.D. Thesis, Department for Electrical Power Systems, University of Duisburg-Essen, Duisburg, Germany, 2014. [Google Scholar]
- Timbus, A.; Korba, P.; Vilhunen, A.; Pepe, G.; Seman, S.; Niiranen, J. Simplified Model of Wind Turbines with Doubly-Fed Induction Generator. In Proceedings of the 10th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Farms, Aarhus, Denmark, 18 October 2011; p. 6. [Google Scholar]
- Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E.; Fortmann, J. Field Validation of a Standard Type 3 Wind Turbine Model for Power System Stability, According to the Requirements Imposed by IEC 61400-27-1. IEEE Trans. Energy Convers. 2018, 33, 137–145. [Google Scholar] [CrossRef]
- Seman, S.; Niiranen, J.; Virtanen, R.; Matsinen, J.P. Low voltage ride-through analysis of 2 MW DFIG wind turbine—Grid code compliance validations. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Jimenez, F.; Gomez-Lazaro, E. Field Validation of Generic Type 4 Wind Turbine Models Based on IEC and WECC Guidelines. IEEE Trans. Energy Convers. 2018, 34, 933–941. [Google Scholar] [CrossRef]
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Molina-García, A.; Gómez-Lázaro, E. Comparison of a standard type 3B WT model with a commercial build-in model. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Operation of active and reactive control systems of a generic Type 3 WT model. In Proceedings of the 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 606–610. [Google Scholar]
- Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Jiménez-Buendía, F.; Molina-García, Á.; Gómez-Lázaro, E. Generic Type 3 Wind Turbine Model Based on IEC 61400-27-1: Parameter Analysis and Transient Response under Voltage Dips. Energies 2017, 10, 1441. [Google Scholar] [CrossRef]
- Akhmatov, V.; Andresen, B.; Nielsen, J.N.; Jensen, K.H.; Goldenbaum, N.M.; Thisted, J.; Frydensbjerg, M. Unbalanced Short-Circuit Faults: Siemens Wind Power Full Scale Converter Interfaced Wind Turbine Model and Certified Fault-Ride-Through Validation. In Proceedings of the 2010 European Wind Energy Conference and Exhibition, Warsaw, Poland, 20–23 April 2010; p. 9. [Google Scholar]
- Trilla, L.; Gomis-Bellmunt, O.; Junyent-Ferre, A.; Mata, M.; Sánchez Navarro, J.; Sudria-Andreu, A. Modeling and Validation of DFIG 3-MW Wind Turbine Using Field Test Data of Balanced and Unbalanced Voltage Sags. IEEE Trans. Sustain. Energy 2011, 2, 509–519. [Google Scholar] [CrossRef]
- Chang, Y.; Hu, J.; Tang, W.; Song, G. Fault Current Analysis of Type-3 WTs Considering Sequential Switching of Internal Control and Protection Circuits in Multi Time Scales during LVRT. IEEE Trans. Power Syst. 2018, 33, 6894–6903. [Google Scholar] [CrossRef]
- Goksu, O.; Altin, M.; Fortmann, J.; Sørensen, P. Field Validation of IEC 61400-27-1 Wind Generation Type 3 Model with Plant Power Factor Controller. IEEE Trans. Energy Convers. 2016, 31, 1170–1178. [Google Scholar] [CrossRef]
- Fortmann, J. Generic aerodynamic model for simulation of variable speed wind turbines. In Proceedings of the 9th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, Quebec City, QC, Canada, 18–19 October 2010; p. 7. [Google Scholar]
- Zhang, J.; Cheng, M.; Chen, Z.; Fu, X. Pitch angle control for variable speed wind turbines. In Proceedings of the Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; pp. 2691–2696. [Google Scholar]
- Buendia, F.J.; Vigueras-Rodriguez, A.; Gomez-Lazaro, E.; Fuentes, J.A.; Molina-Garcia, A. Validation of a Mechanical Model for Fault Ride-Through: Application to a Gamesa G52 Commercial Wind Turbine. IEEE Trans. Energy Convers. 2013, 28, 707–715. [Google Scholar] [CrossRef]
- Buendía, F.J.; Gordo, B.B. Generic Simplified Simulation Model for DFIG with Active Crowbar. In Proceedings of the 11th International Workshop on Large-Scale Integration of Wind Power into Power Systems, Lisbon, Protugal, 13–15 November 2012. [Google Scholar]
- Salles, M.B.C.; Hameyer, K.; Cardoso, J.R.; Grilo, A.P.; Rahmann, C. Crowbar System in Doubly Fed Induction Wind Generators. Energies 2010, 3, 738–753. [Google Scholar] [CrossRef]
- Subramanian, C.; Casadei, D.; Tani, A.; Sørensen, P.; Blaabjerg, F.; McKeever, P. Implementation of electrical simulation model for IEC standard Type-3A generator. In Proceedings of the 2013 European Modelling Symposium, Manchester, UK, 20–22 November 2013; pp. 426–431. [Google Scholar]
- Jimenez, F.; Gómez-Lázaro, E.; Fuentes, J.A.; Molina-García, A.; Vigueras-Rodríguez, A. Validation of a double fed induction generator wind turbine model and wind farm verification following the Spanish grid code. Wind Energy 2012, 15, 645–659. [Google Scholar] [CrossRef]
- Honrubia-Escribano, A.; Gómez-Lázaro, E.; Molina-Garcia, A.; Fuentes, J. Influence of voltage dips on industrial equipment: analysis and assessment. Int. J. Electr. Power Energy Syst. 2012, 41, 87–95. [Google Scholar] [CrossRef]
- Jiménez, F.; Gómez-Lázaro, E.; Fuentes, J.A.; Molina-García, A.; Vigueras-Rodríguez, A. Validation of a DFIG wind turbine model submitted to two-phase voltage dips following the Spanish grid code. Renew. Energy 2013, 57, 27–34. [Google Scholar] [CrossRef]
- Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Fortmann, J.; Gómez-Lázaro, E. Generic Type 3 WT models: comparison between IEC and WECC approaches. IET Renew. Power Gener. 2019, 3, 1168–1178. [Google Scholar] [CrossRef]
- WECC REMTF. WECC Wind Power Plant Dynamic Modeling Guidelines; Technical Report; WECC: Salt Lake City, UT, USA, 2014. [Google Scholar]
- Gonzalez-Longatt, F.M.; Rueda, J.L. PowerFactory Applications for Power System Analysis; Springer: Cham, Switzerland, 2014. [Google Scholar]
- GmbH D. DIgSILENT PowerFactory V18–User Manual; DIgSILENT GmbH: Gomaringen, Germany, 2018. [Google Scholar]
- Villena-Ruiz, R.; Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Implementation of a generic Type 1 wind turbine generator for power system stability studies. In Proceedings of the International Conference on Renewable Energies and Power Quality, Malaga, Spain, 4–6 April 2017; pp. 4–6. [Google Scholar]
- Hansen, A.; Sørensen, P.; Iov, F.; Blaabjerg, F. Initialisation of Grid-Connected Wind Turbine Models in Power-System Simulations. Wind Eng. 2003, 27, 21–38. [Google Scholar] [CrossRef]
- Hansen, A.D.; Jauch, C.; Sørensen, P.; Iov, F.; Blaabjerg, F. Dynamic Wind Turbine Models in Power System Simulation Tool DIgSILENT; Technical Report; Riso-DTU National Laboratory: Roskilde, Denmark, 2007. [Google Scholar]
- Asmine, M.; Brochu, J.; Fortmann, J.; Gagnon, R.; Kazachkov, Y.; Langlois, C.E.; Larose, C.; Muljadi, E.; MacDowell, J.; Pourbeik, P.; et al. Model validation for wind turbine generator models. IEEE Trans. Power Syst. 2011, 26, 1769–1782. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Error | Fault Window | Post-Fault Window |
|---|---|---|
| Mean error, ME | [ ] | [ ] |
| Mean absolute error, MAE | [ ] | [ ] |
| Maximum absolute error, MXE | [ ] | [ ] |
| Parameter | Description | Model | Value |
|---|---|---|---|
| Crowbar duration vs. voltage variation | 0.05 | ||
| Electromagnetic transient reactance | Generator system | 0.4 | |
| Time constant for crowbar washout filter | 0.5 | ||
| Maximum active current ramp rate | 3 | ||
| Reactive power control mode | 1 | ||
| Under Voltage Ride Through (UVRT) reactive power control mode | 2 | ||
| Voltage scaling factor for UVRT current | 5.55 | ||
| Post-fault reactive current injection | 0.05 | ||
| Resistive component of voltage drop impedance | Reactive power control | 0.01 | |
| Inductive component of voltage drop impedance | 0.1 | ||
| Time constant in reactive power order lag | 0.001 | ||
| Maximum voltage in voltage PI controller integral term | 2 | ||
| Minimum voltage in voltage PI controller integral term | 0 | ||
| Voltage threshold for UVRT detection | 0.9 | ||
| Limitation of Type 3 stator current | Current limitation | 0 | |
| Prioritisation of reactive power control during UVRT | 1 | ||
| Filter time constant for generator speed measurement | 500 | ||
| Offset to reference value that limits controller action | 0.02 | ||
| Gain for active DTD | 0.8834 | ||
| Time constant in power measurement filter | Active power control | 0.001 | |
| Time constant in power order lag | 0.0005 | ||
| Time constant in voltage measurement filter | 0.001 | ||
| Maximum WT power ramp rate | 2.75 | ||
| Time constant in speed reference filter | 2 | ||
| Limitation of torque rise rate during UVRT | 0 | ||
| Voltage scaling factor of reset torque | Torque PI control | 0.45 | |
| Proportional constant of torque PI controller | 10,000 | ||
| Integral constant of torque PI controller | 0.3722 | ||
| Pitch cross-coupling gain | 0 | ||
| Maximum pitch angle | 35 | ||
| Minimum pitch angle | Pitch control | 0 | |
| Maximum pitch angle rate | 10 | ||
| Minimum pitch angle rate | −4 |
| Active Power | MATLAB—Field | PowerFactory—Field | MATLAB—PowerFactory |
|---|---|---|---|
| 2.34 | 1.99 | 0.25 | |
| 2.48 | 2.61 | 0.27 | |
| 11.12 | 12.98 | 1.97 | |
| 1.33 | 1.21 | 0.13 | |
| 3.04 | 3.04 | 0.35 | |
| 8.44 | 8.43 | 0.61 | |
| Reactive Power | MATLAB—Field | PowerFactory—Field | MATLAB—PowerFactory |
| 0.31 | 0.87 | −0.60 | |
| 0.46 | 0.82 | 0.84 | |
| 2.35 | 3.11 | 1.69 | |
| 0.41 | 0.54 | −0.10 | |
| 1.60 | 1.72 | 0.11 | |
| 2.95 | 3.02 | 1.47 |
| Active Power | MATLAB—Field | PowerFactory—Field | MATLAB—PowerFactory |
|---|---|---|---|
| 0.08 | −0.87 | 0.77 | |
| 1.39 | 1.43 | 0.21 | |
| 3.73 | 4.87 | 1.18 | |
| −1.65 | −1.82 | 0.18 | |
| 2.07 | 2.05 | 0.52 | |
| 5.61 | 5.39 | 0.90 | |
| Reactive Power | MATLAB—Field | PowerFactory—Field | MATLAB—PowerFactory |
| −0.56 | −0.50 | −0.14 | |
| 0.60 | 0.37 | 0.49 | |
| 2.53 | 1.65 | 1.34 | |
| 0.62 | 0.57 | 0.08 | |
| 1.11 | 1.14 | 0.23 | |
| 3.90 | 3.71 | 1.59 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villena-Ruiz, R.; Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E. Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches. Energies 2019, 12, 2690. https://doi.org/10.3390/en12142690
Villena-Ruiz R, Lorenzo-Bonache A, Honrubia-Escribano A, Jiménez-Buendía F, Gómez-Lázaro E. Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches. Energies. 2019; 12(14):2690. https://doi.org/10.3390/en12142690
Chicago/Turabian StyleVillena-Ruiz, Raquel, Alberto Lorenzo-Bonache, Andrés Honrubia-Escribano, Francisco Jiménez-Buendía, and Emilio Gómez-Lázaro. 2019. "Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches" Energies 12, no. 14: 2690. https://doi.org/10.3390/en12142690
APA StyleVillena-Ruiz, R., Lorenzo-Bonache, A., Honrubia-Escribano, A., Jiménez-Buendía, F., & Gómez-Lázaro, E. (2019). Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches. Energies, 12(14), 2690. https://doi.org/10.3390/en12142690