Black-Box Behavioral Modeling of Voltage and Frequency Response Characteristic for Islanded Microgrid

Abstract
:1. Introduction
- This method has wide adaptability and is not specific to a particular structure of microgrid. When the structure of microgrid changes randomly, this method is still applicable.
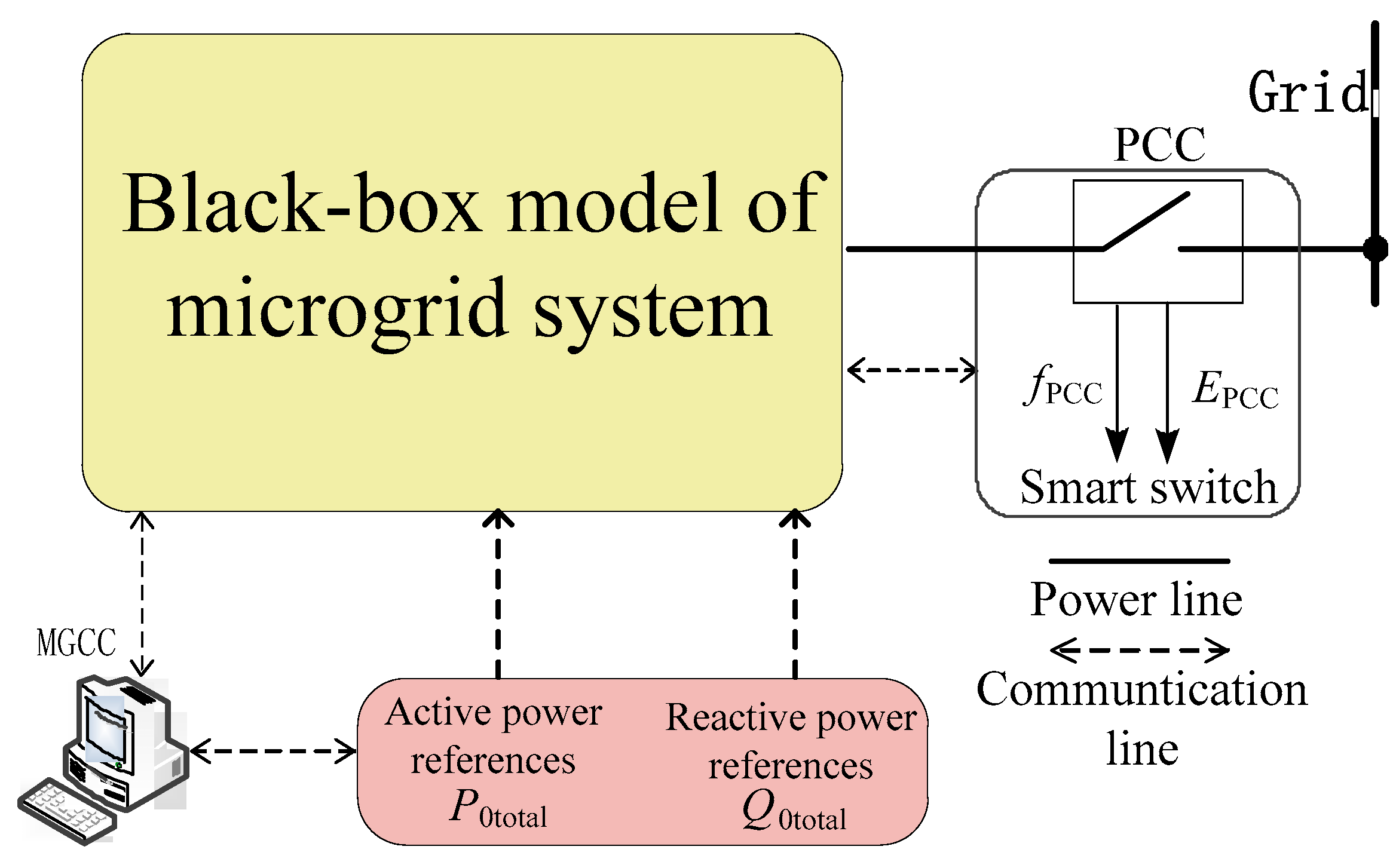
- The internal structure of the microgrid system and the types of loads are not considered at all. The method only pays attention to the response characteristics observed at PCC to ensure that the model structure is simple and easy to be applied.
- The proposed method is not confined to the analysis of relationship between power references and the voltage frequency, it is a general idea that can be applied in analyzing other port data of microgrid.
- Meanwhile, this method is also applicable to all kinds of microgrid systems, such as AC microgrids, DC microgrids, AC/DC hybrid microgrids, and microgrids with various types of electrical equipment and loads (like rotating generators based DG, inverter connected distributed energy resource (DER), controllable and uncontrollable loads, etc.).
2. Topology and Modeling Requirements of Microgrid
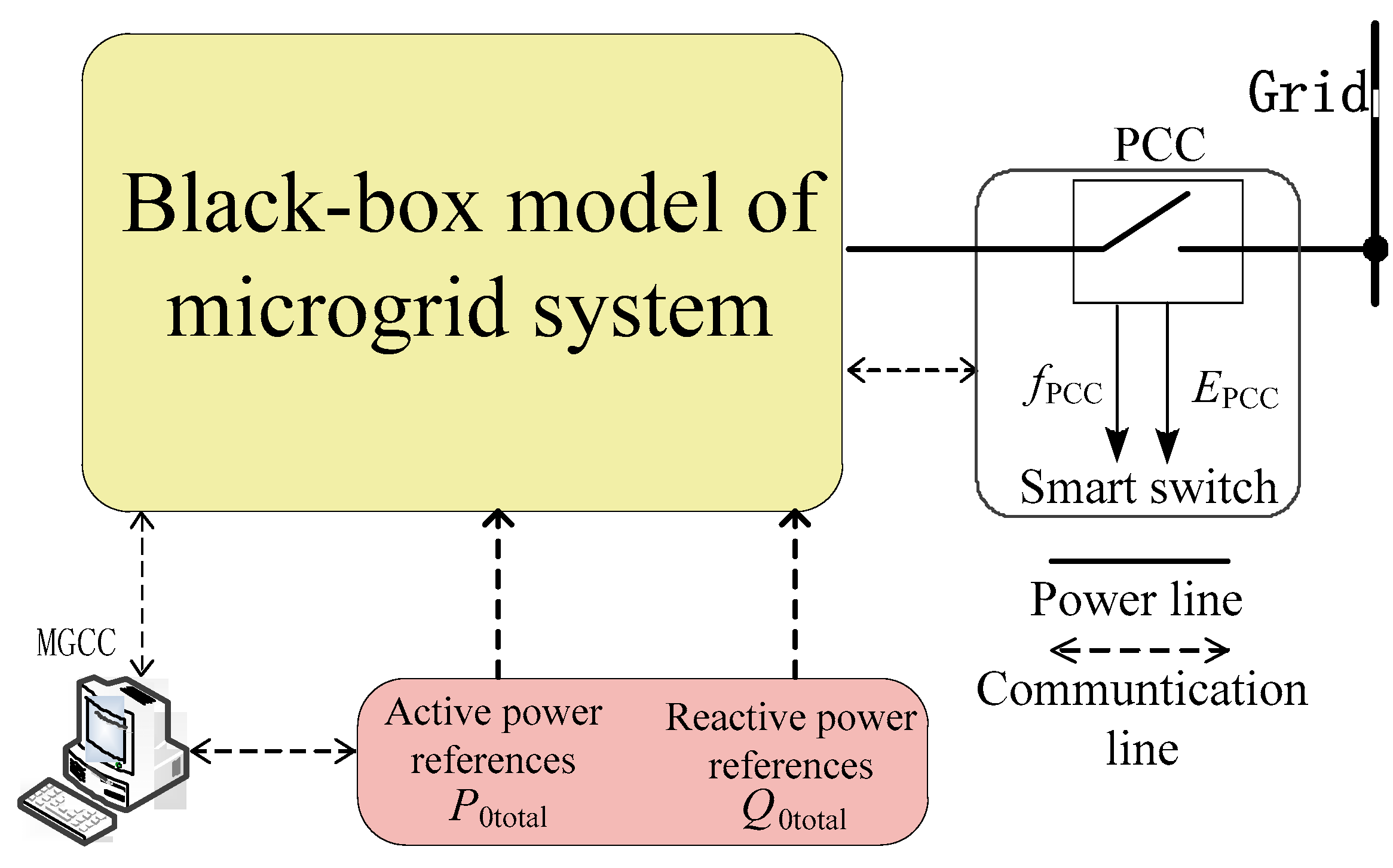
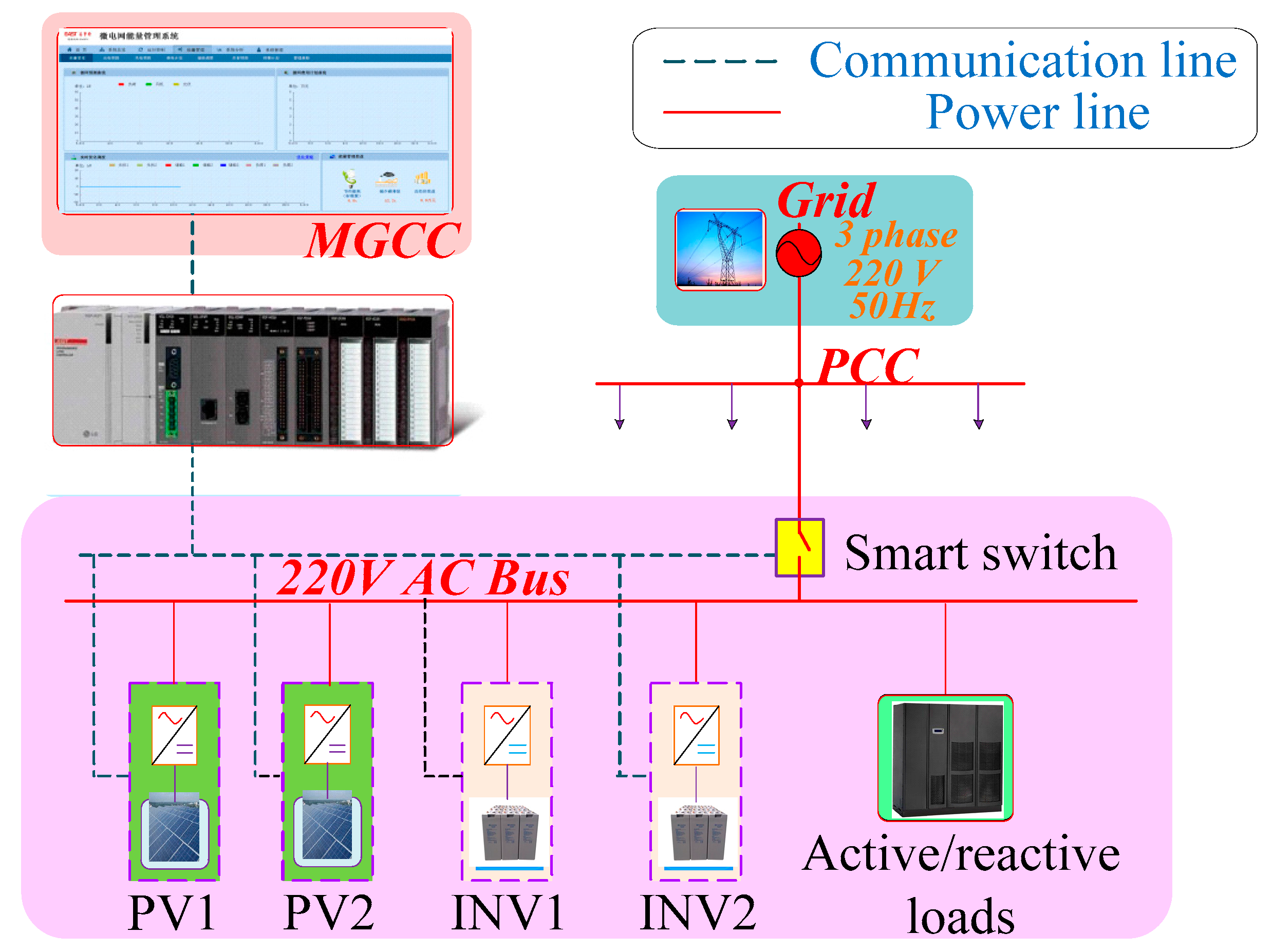
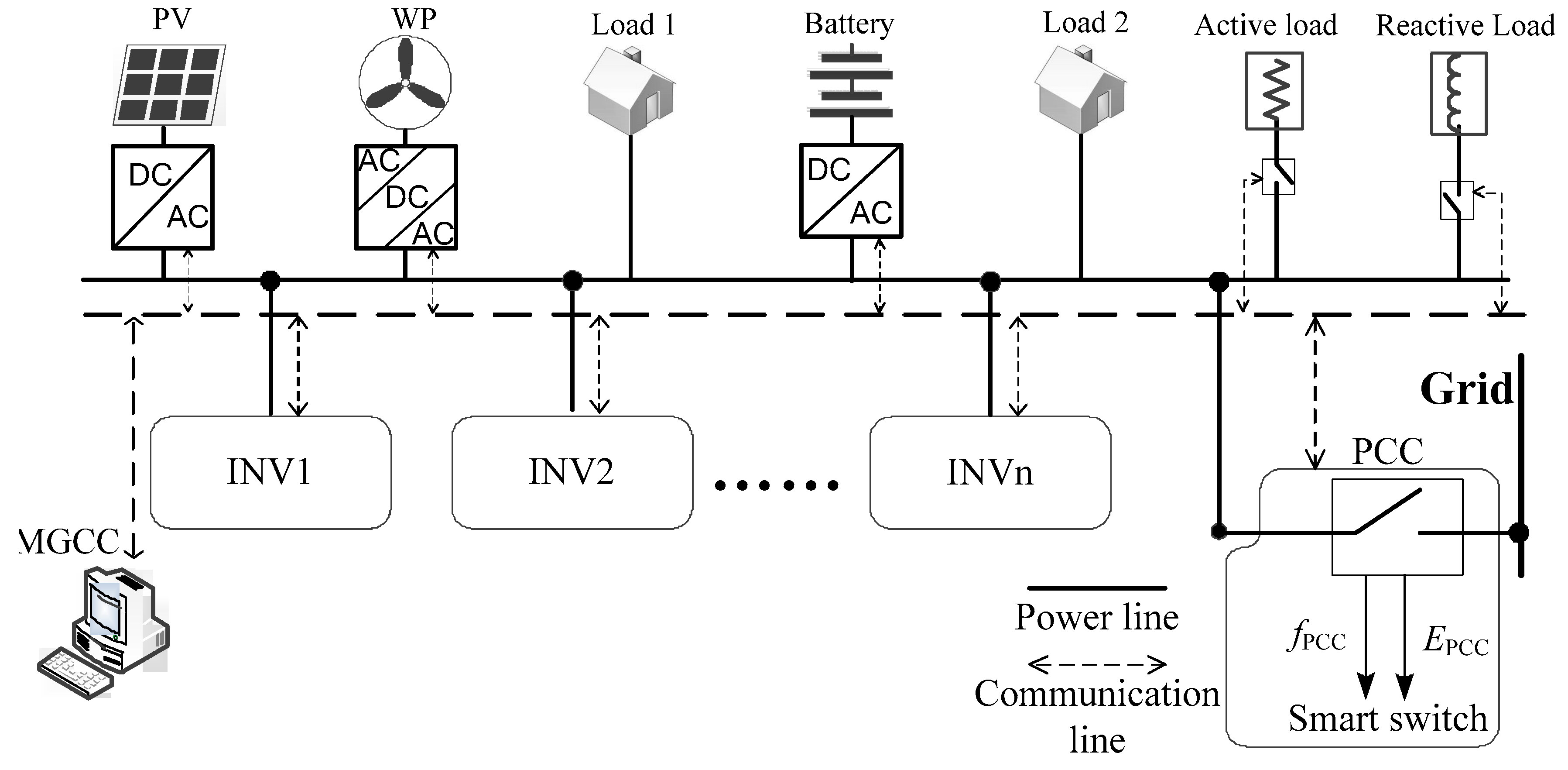
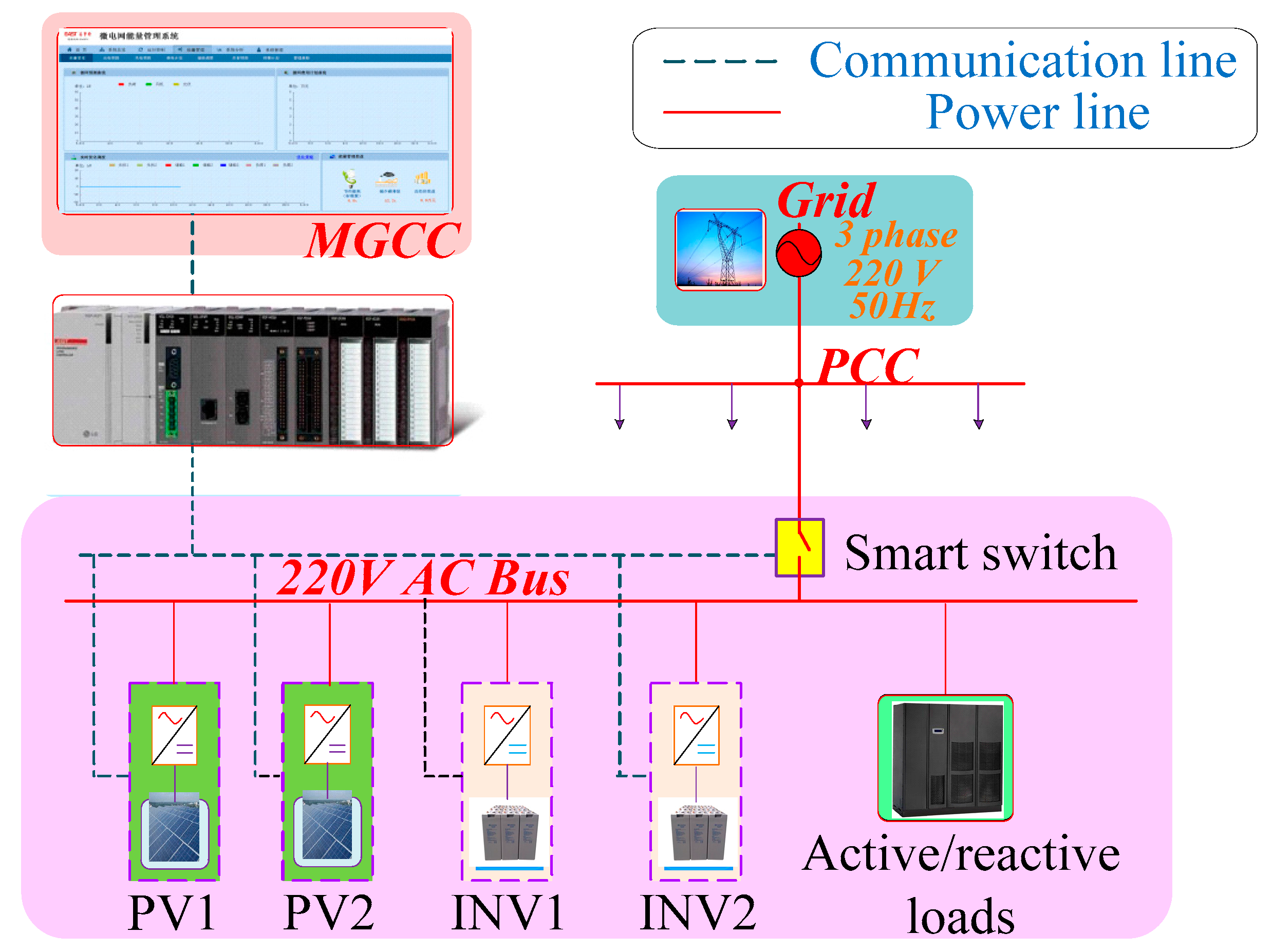
2.1. Typical Topology of Microgrid System
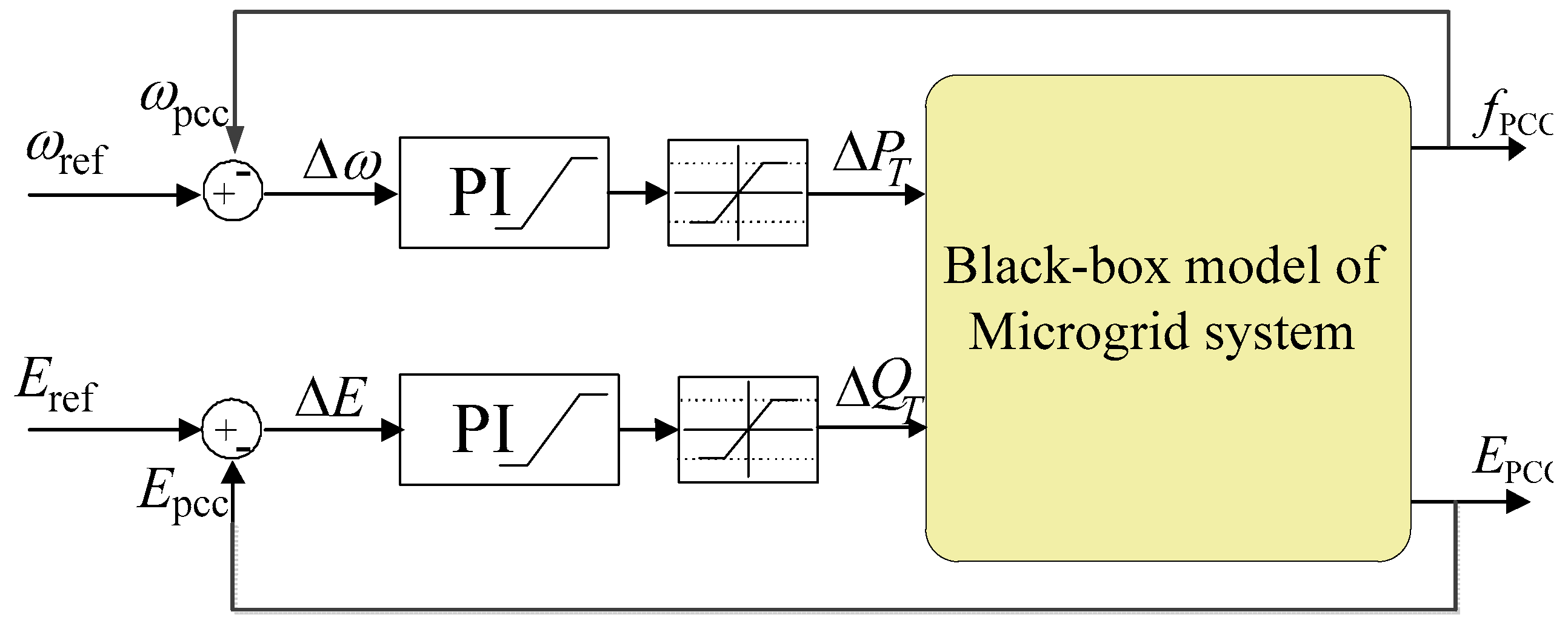
2.2. Modeling Requirements
3. Identification of Black-Box Model
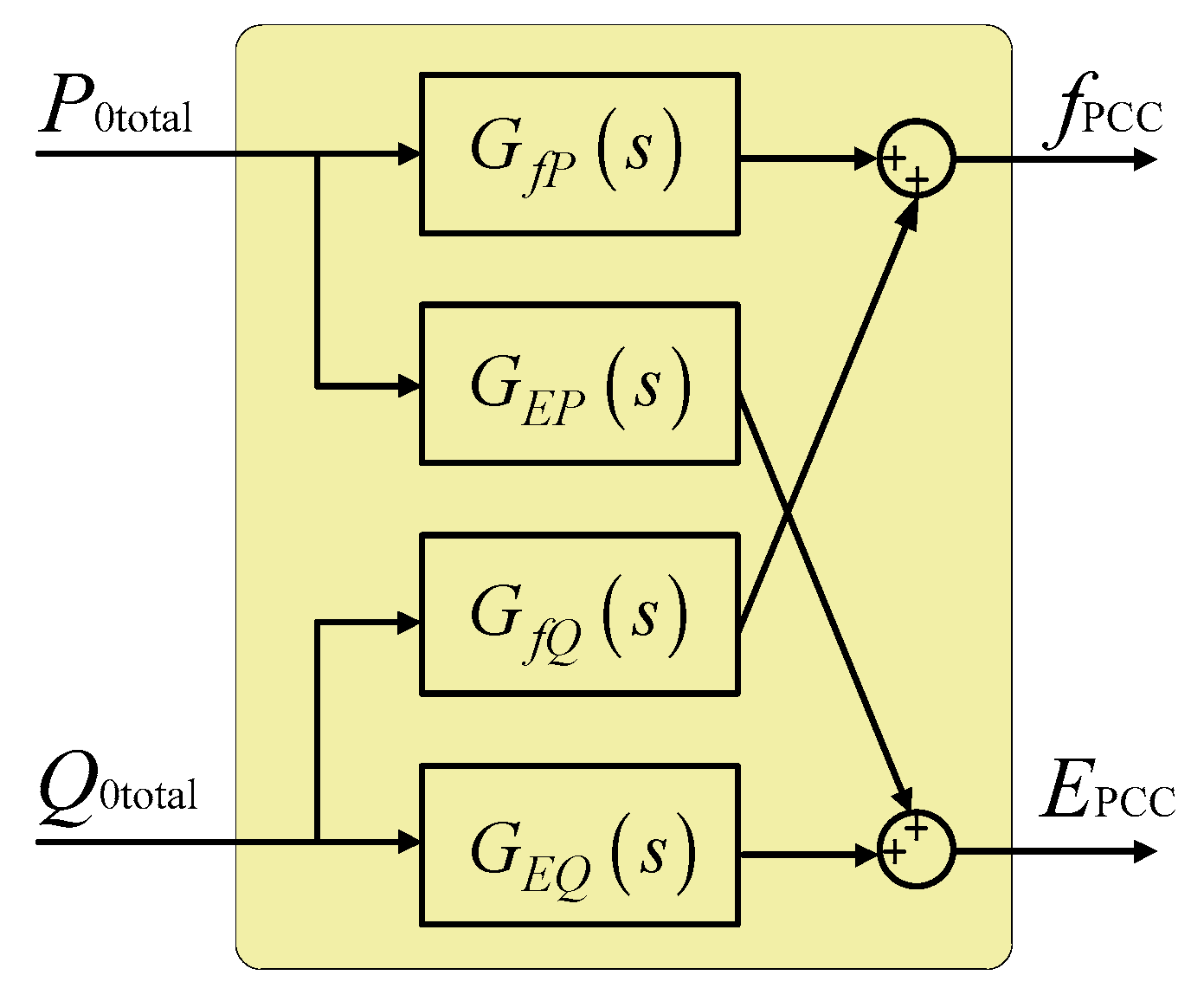
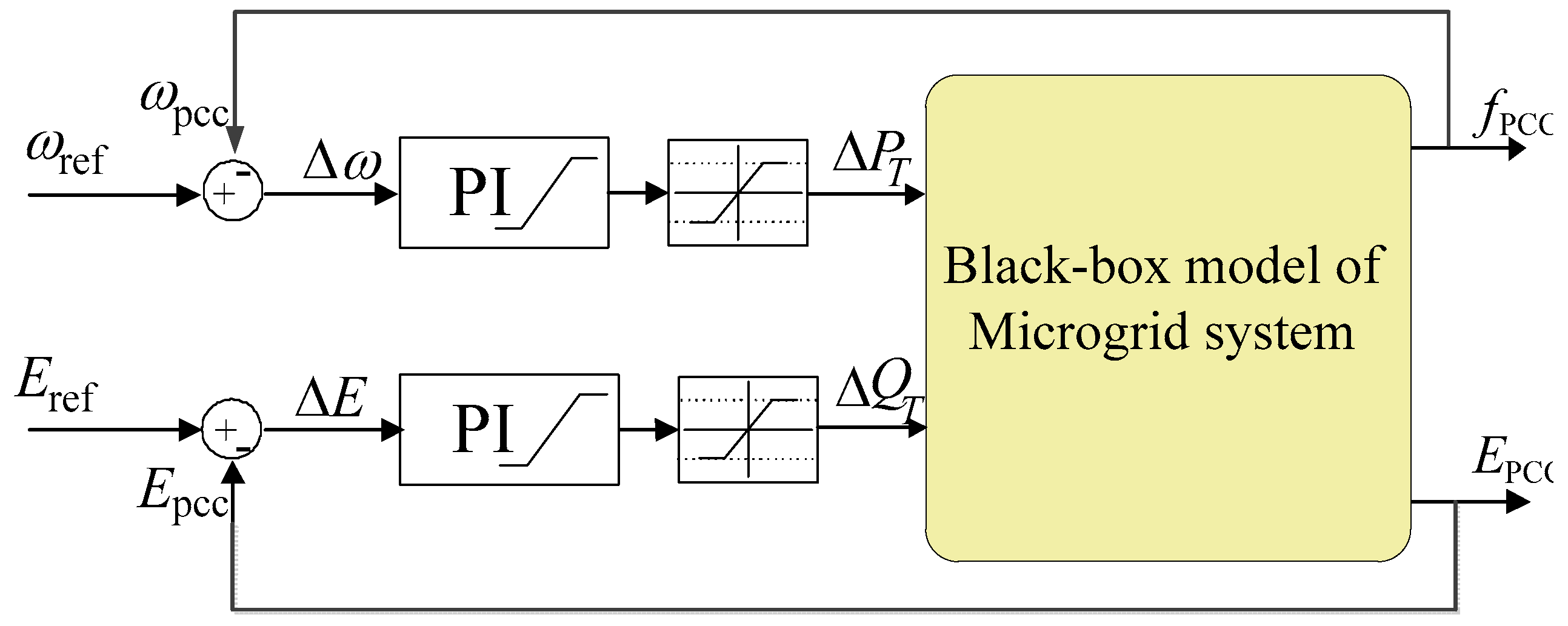
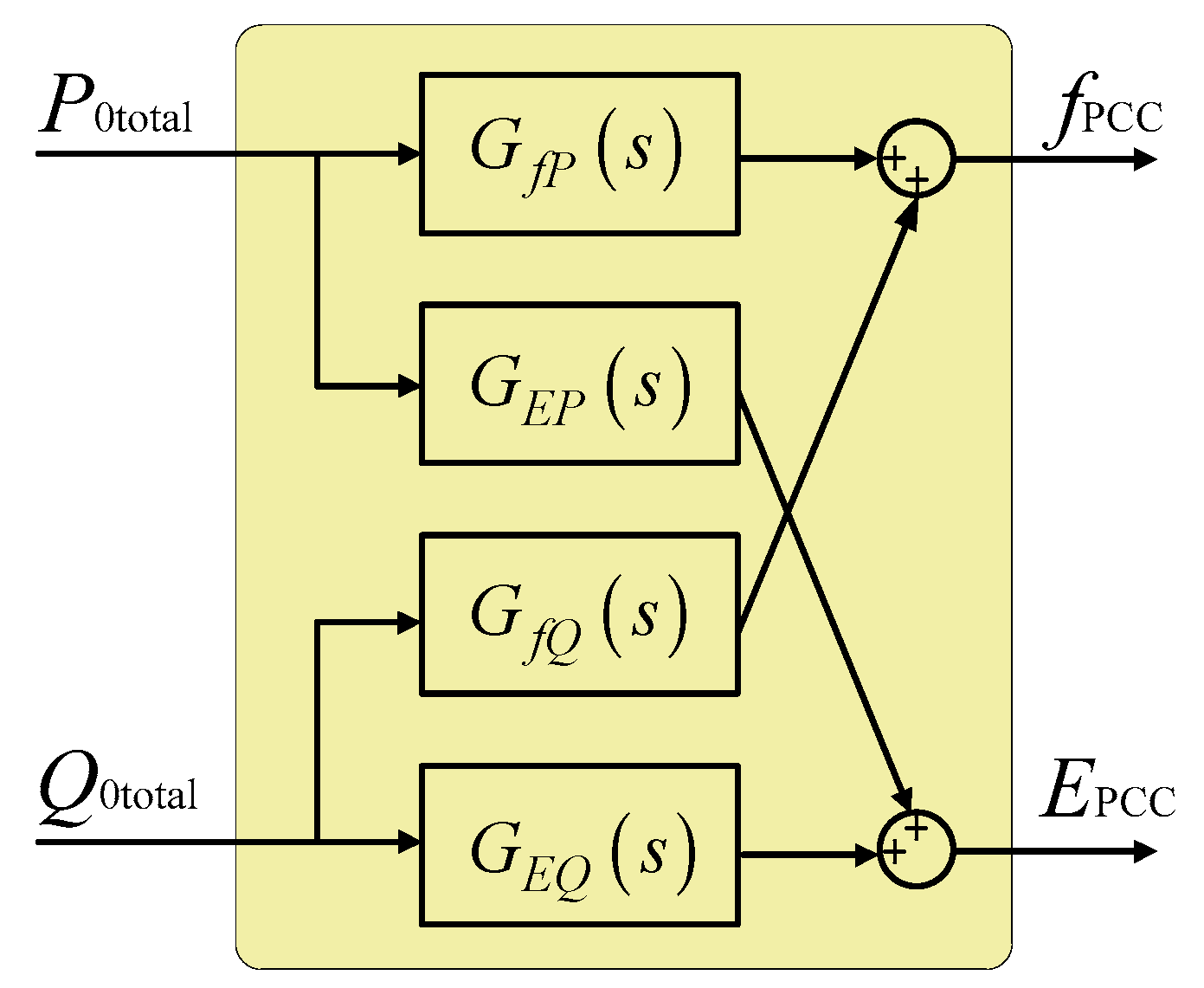
3.1. The Structure of Identification Model
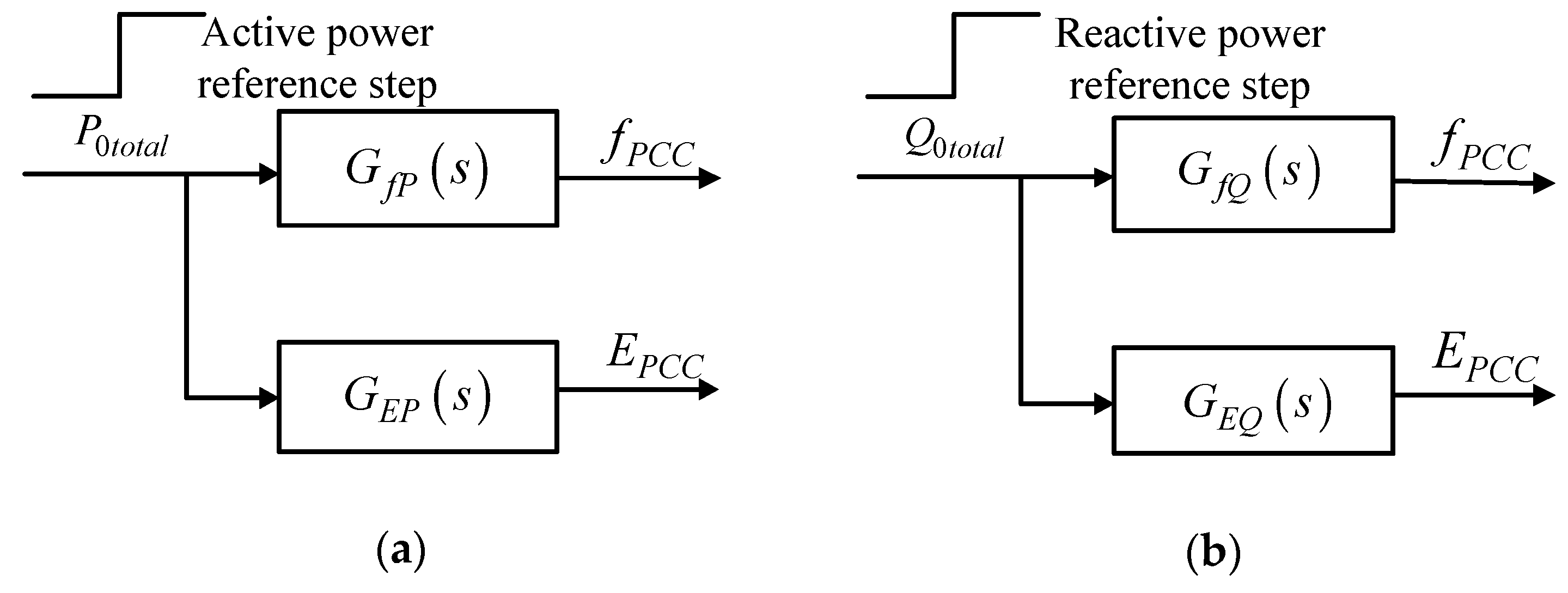
3.2. Identification Experiments Design
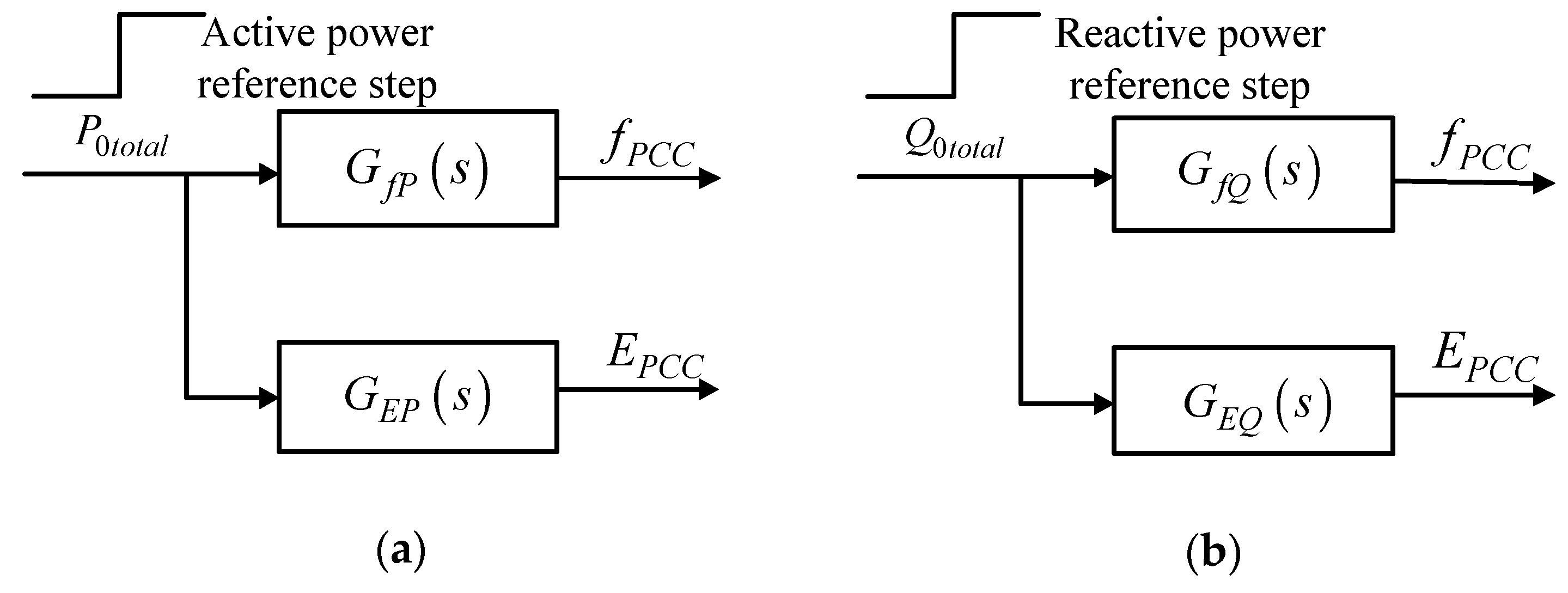
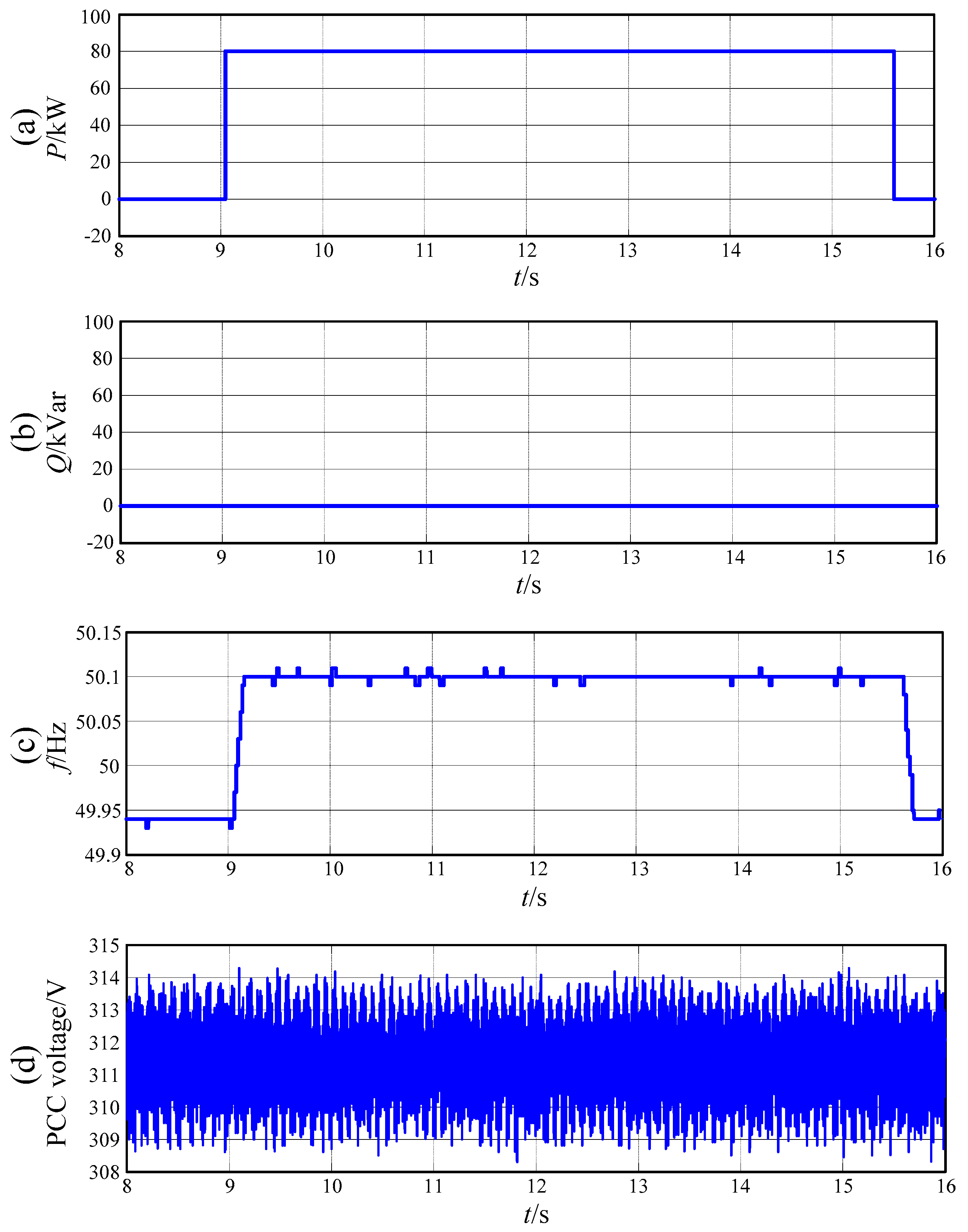
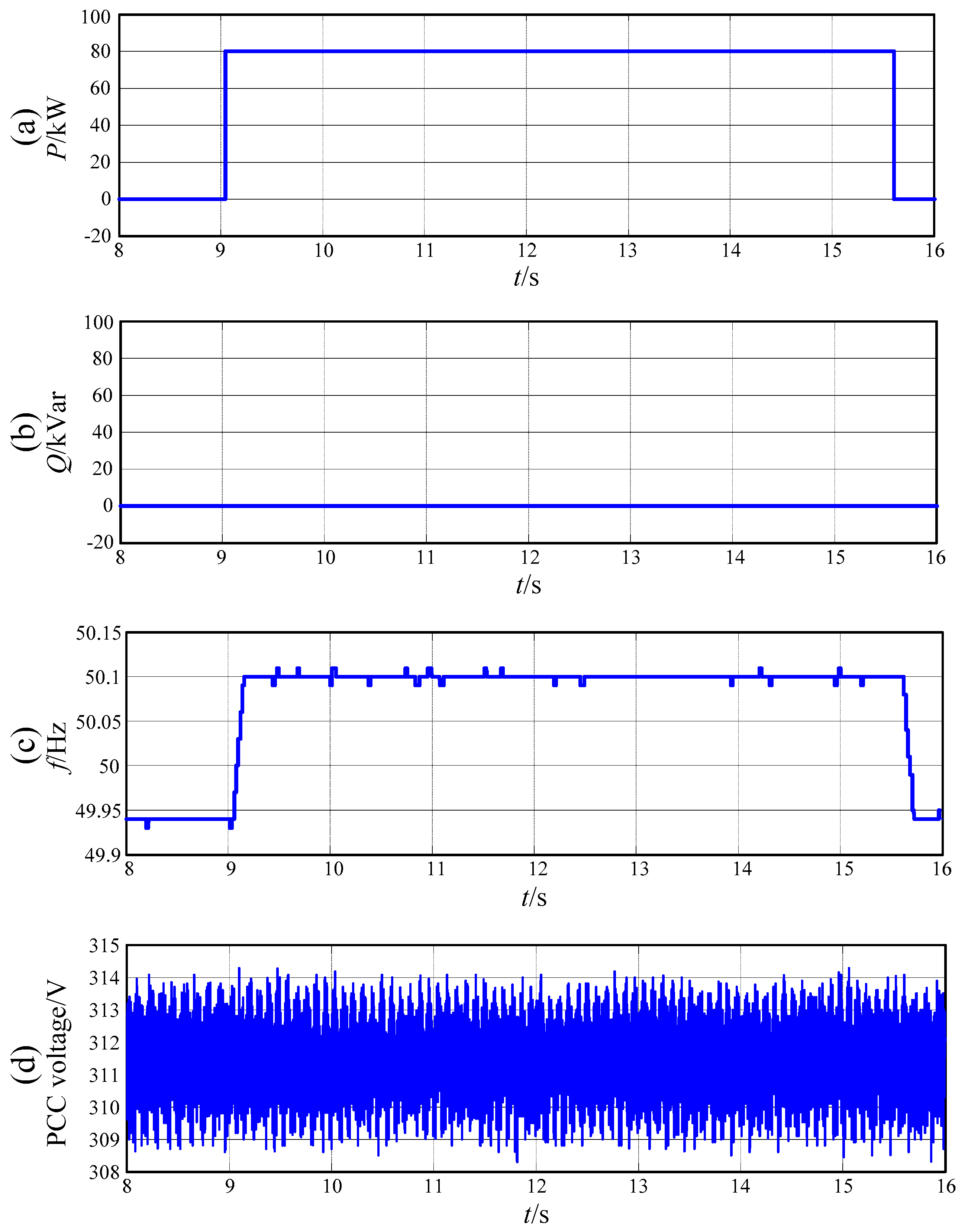
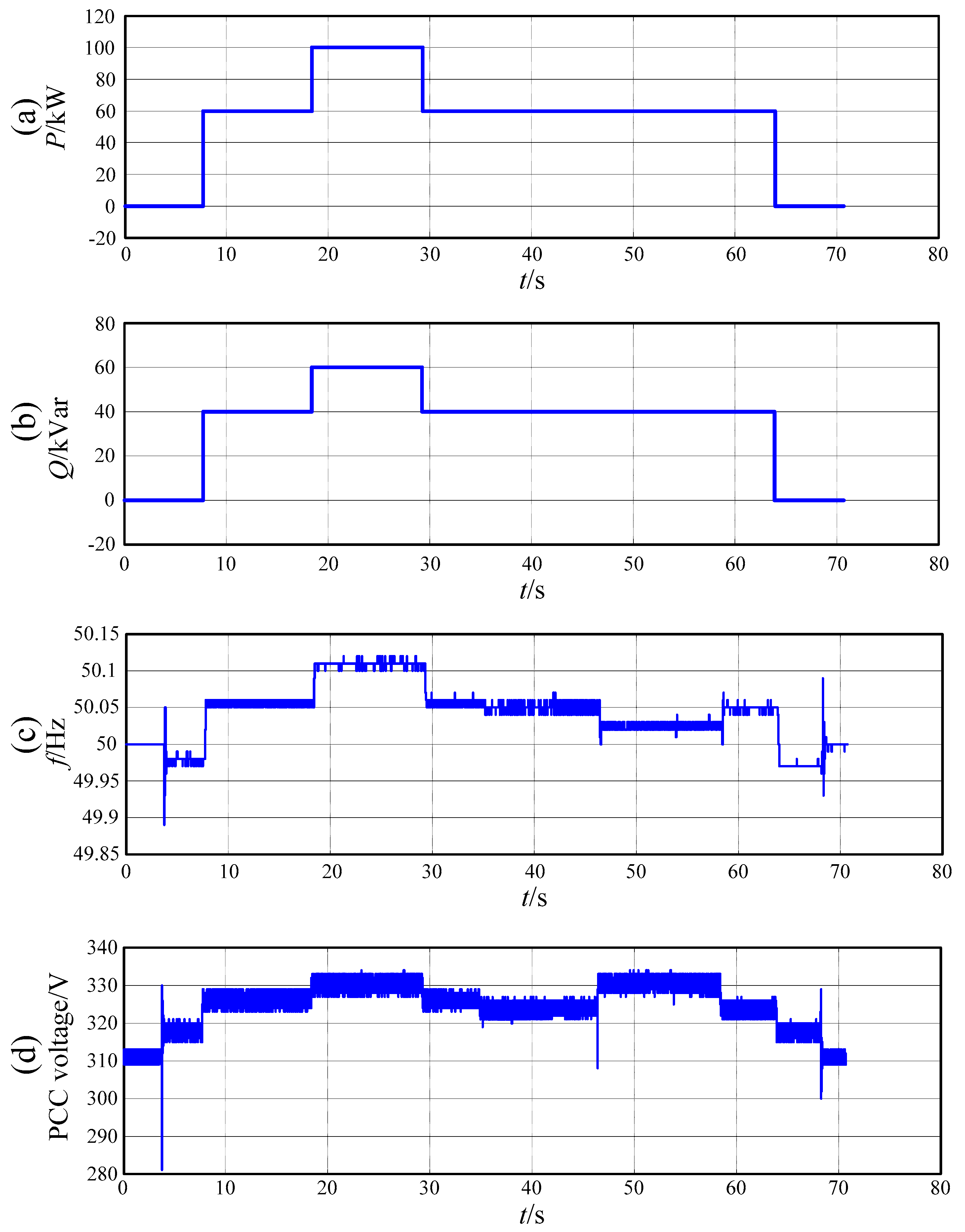
3.2.1. Active Power Reference Step
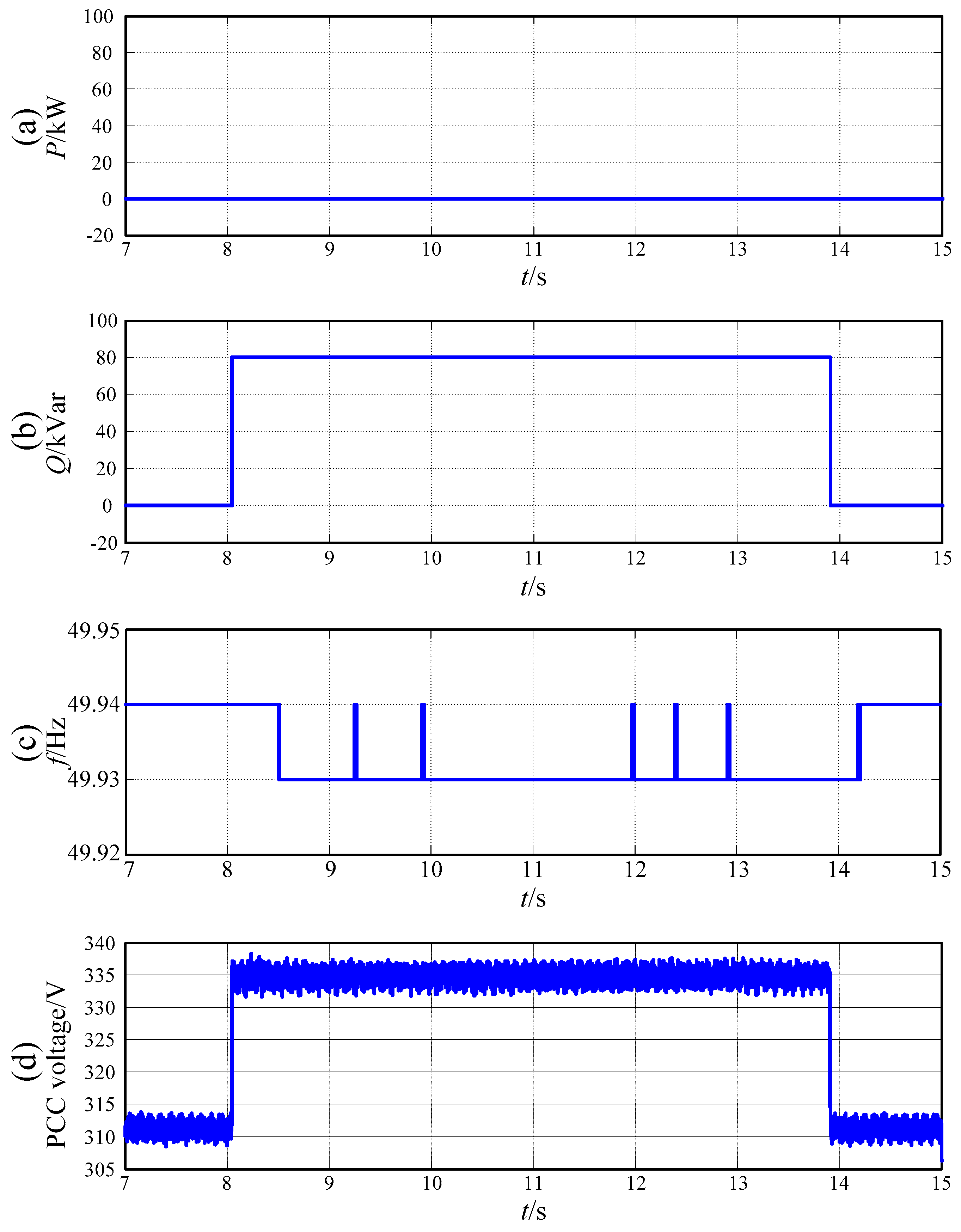
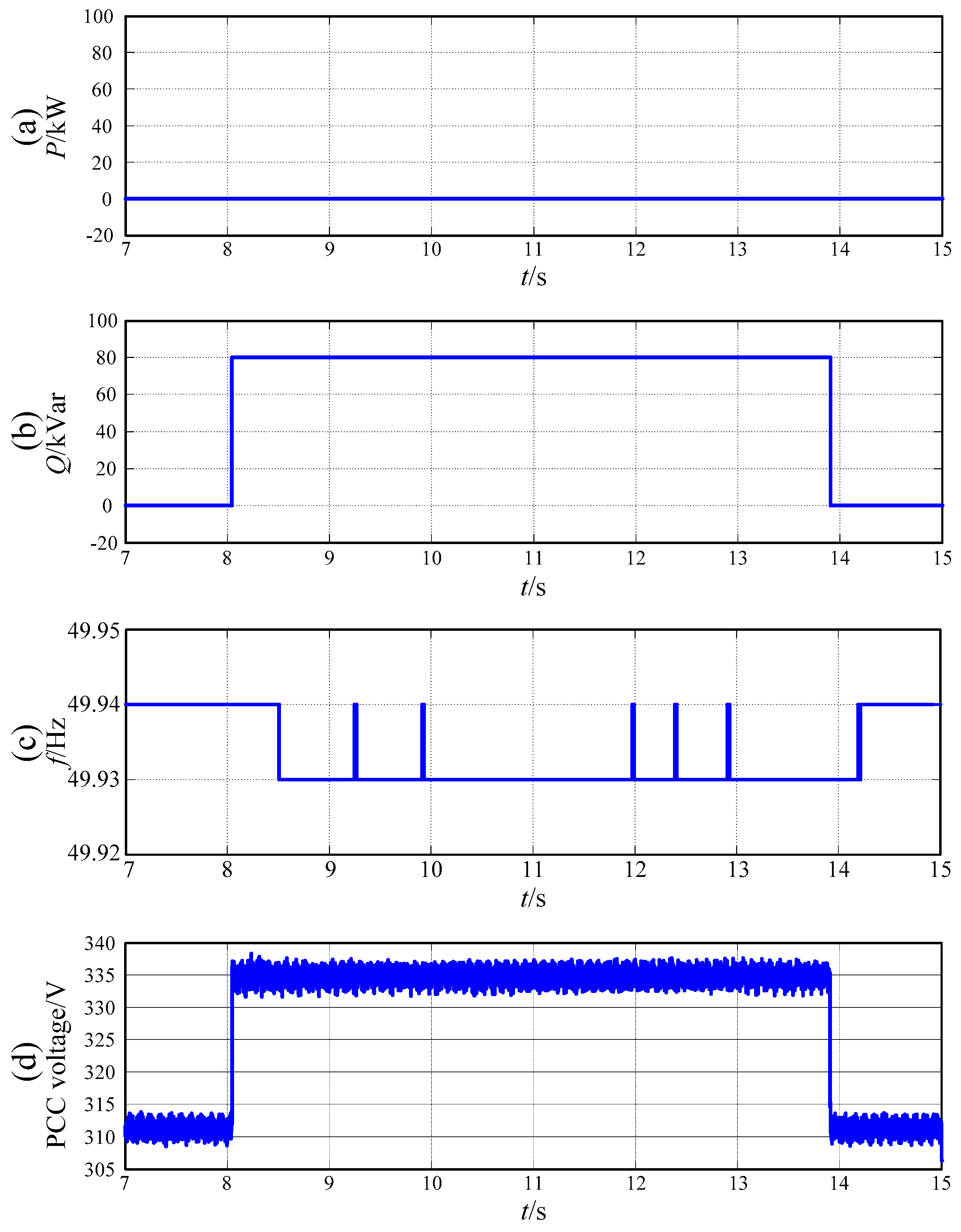
3.2.2. Reactive Power Reference Step
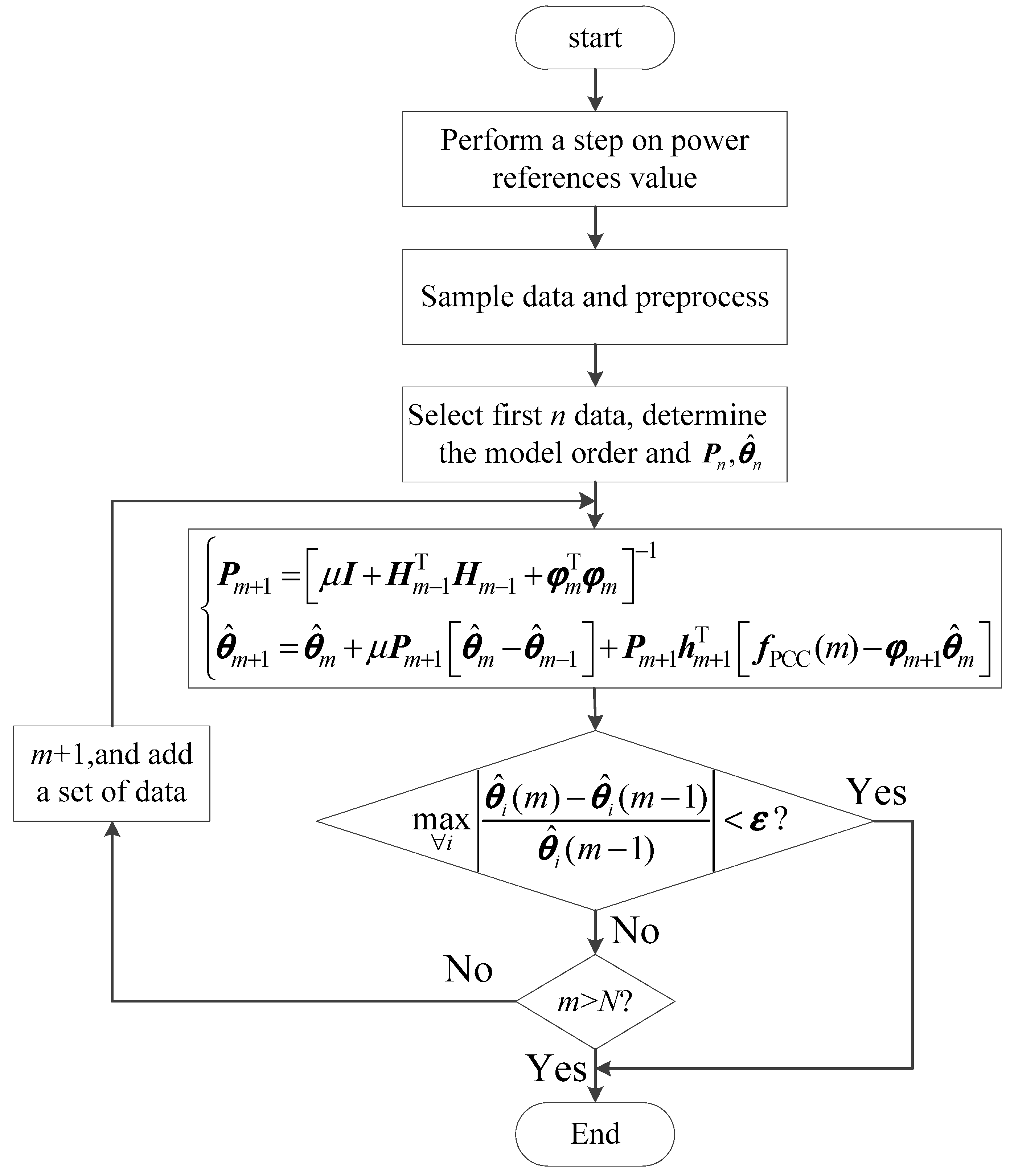
3.3. Identification Strategy and Process
3.3.1. Data Preprocessing
- Offset removal: The black-box model of the microgrid system includes the steady-state component and the dynamic component. But the parameters to be identified only involve the system dynamics of the system model, thus it is necessary to remove the steady-state components, i.e., the steady-state values of the input and output signals (before the step is done) respectively.
- Measurement prefiltering: Since the sampling data contains some ripple and noise caused by the switching frequency, prefiltering input and output data should be considered before the recursive process to avoid the identification accuracy being affected.
3.3.2. Model Order and Initial Value Selection
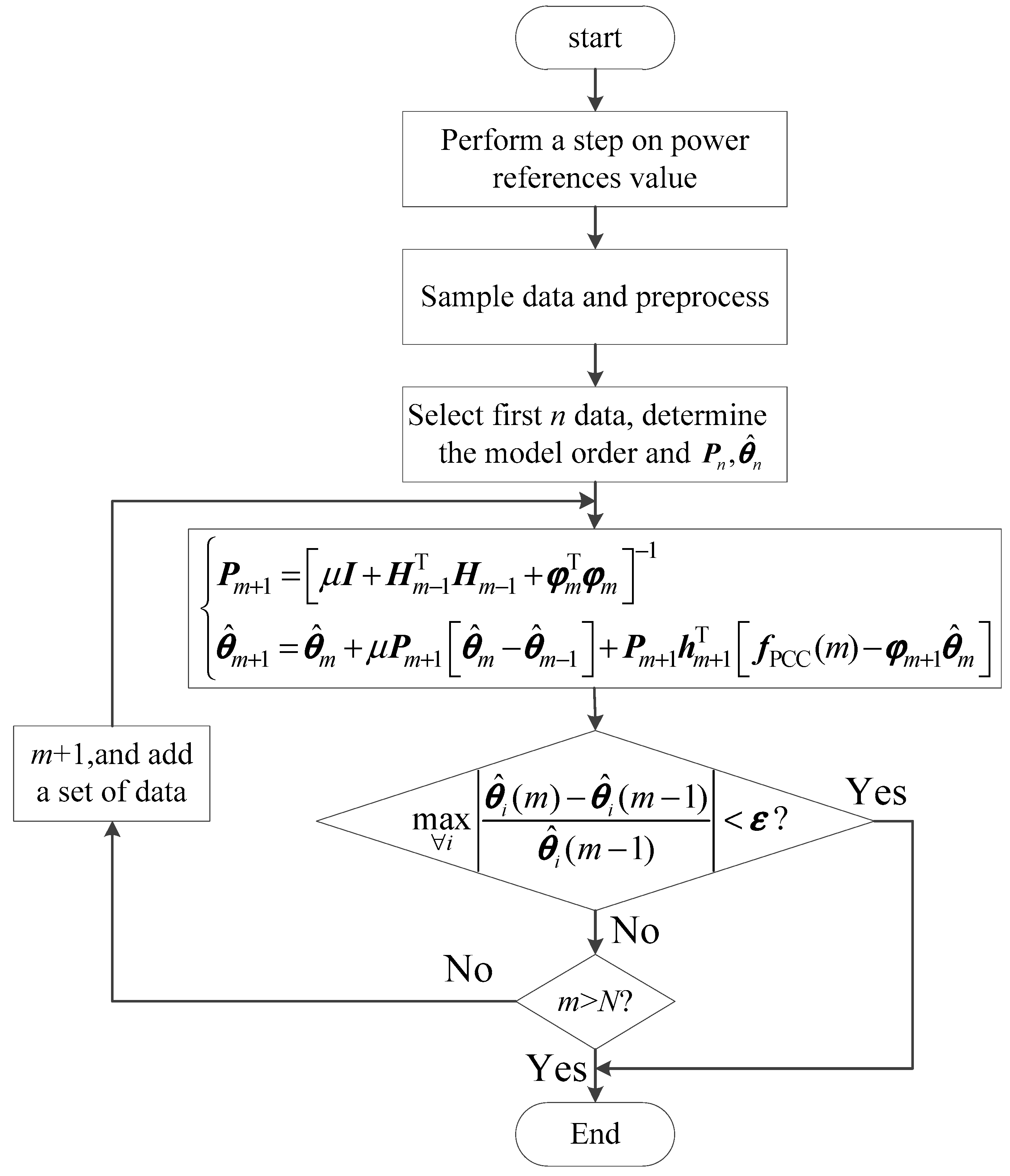
3.3.3. Online Recursive Algorithm
- Under the condition of < 0.3, it shows that the objective function J exhibits a linearity reduction trend during the recursive process, is needed to increase in the subsequent recursive process to ensure better frequency and voltage identification
- Under the condition of 0.3 < < 0.7, it indicates that the objective function has a small change in linearity during the recursive process, therefore the damping factor is close to the best value and there is no need to change it.
- Under the condition of > 0.7, a smaller damping factor should be chosen.
4. Experiments and Model Validation
4.1. Identification Experiments of GfP(s) and GEP(s)
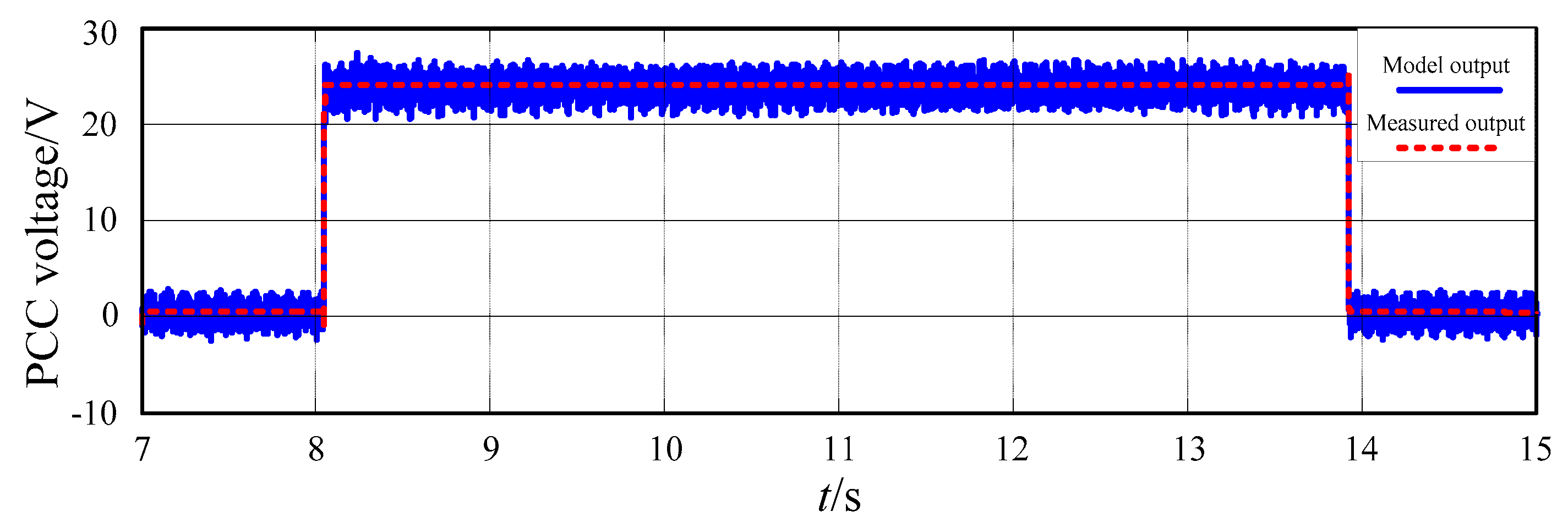
4.2. Identification Experiments of GfQ(s) and GEQ(s)
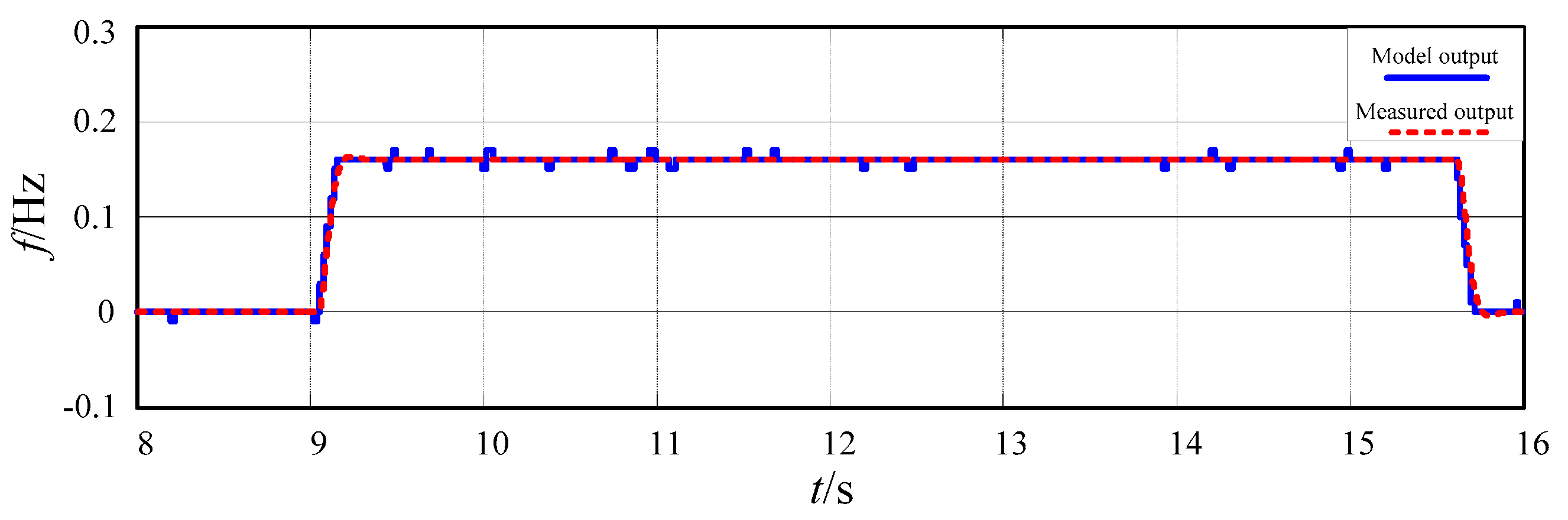
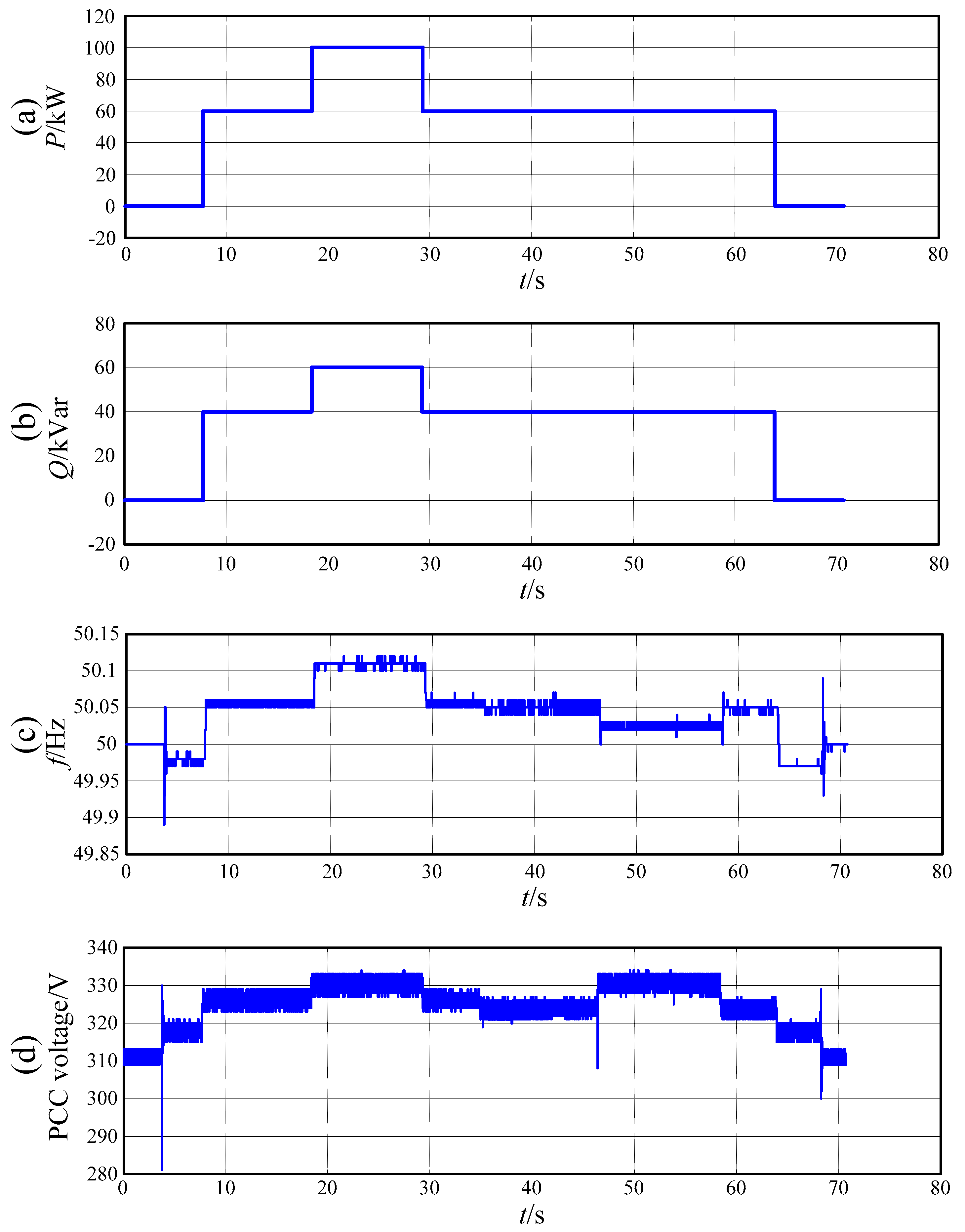
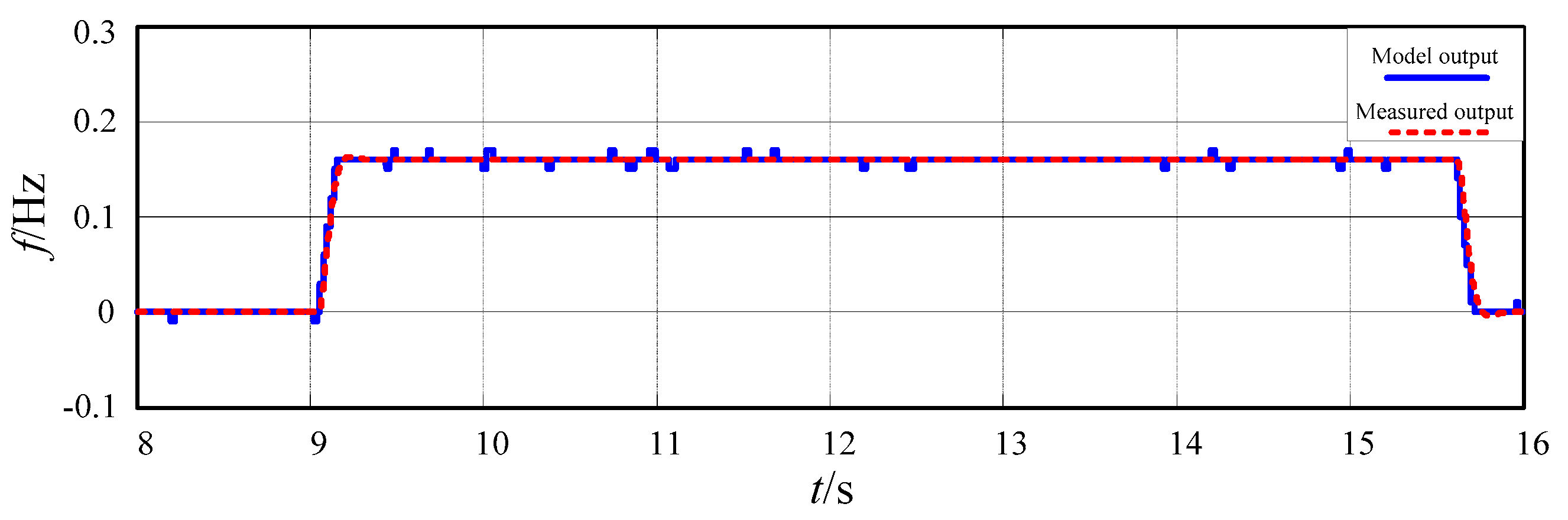
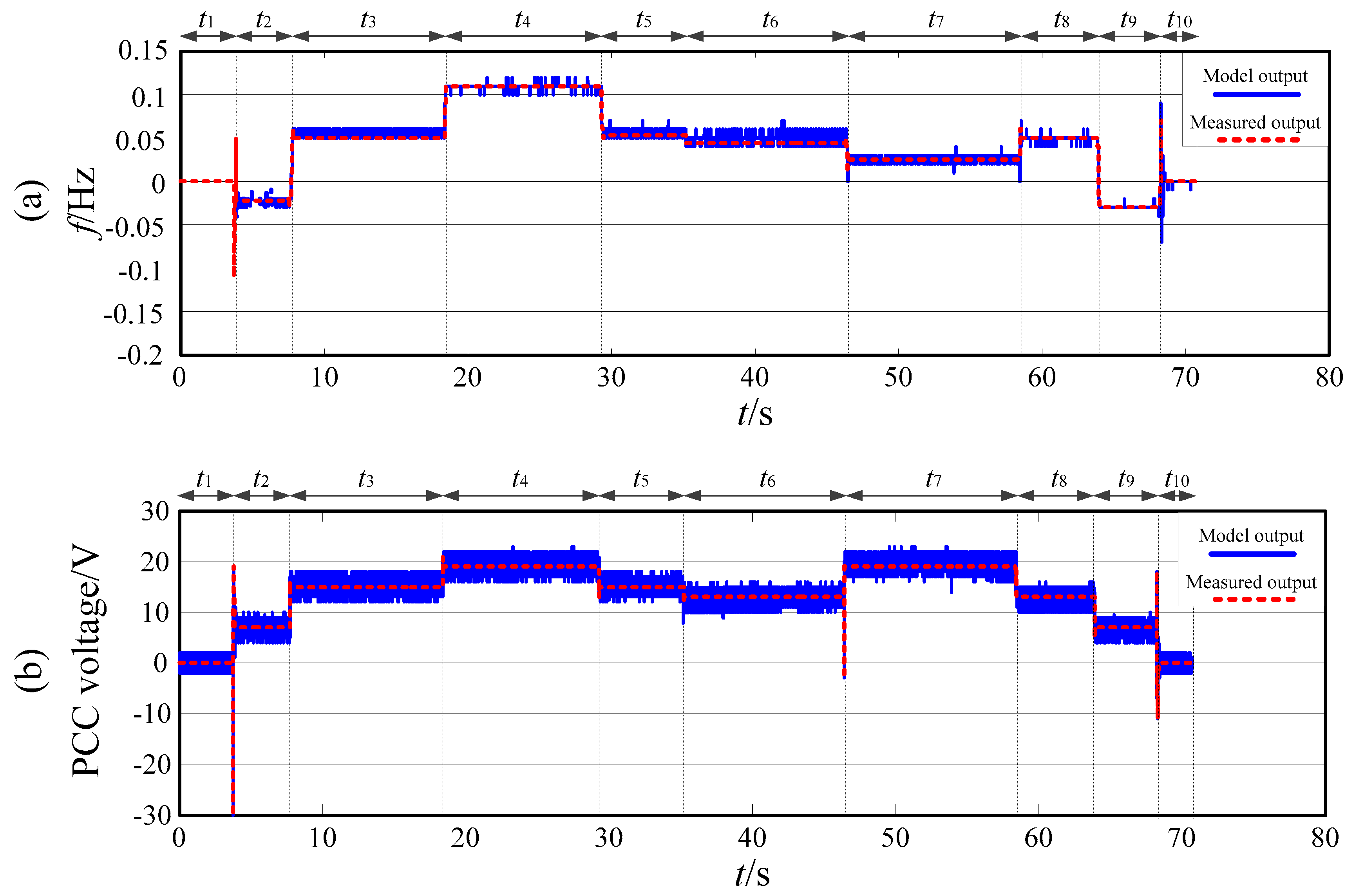
4.3. Recursive Model Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, X.D.; Xu, X.D.; Chen, S.Y.; Wu, J.Z.; Jia, H.J. A brief review to integrated energy system and energy internet. Trans. Chin. Electrotech. Soc. 2016, 31, 1–13. [Google Scholar]
- Hou, X.B.; Wang, L.; Li, Q.M.; Wang, J.; Liu, J.Z.; Qian, X.S. Review of key technologies for high-voltage and high-power transmission in space solar power station. Trans. China Electrotech. Soc. 2017, 15, 61–73. [Google Scholar]
- Zheng, W. Identification Modeling Method and Application of Photovoltaic Grid-Connected Inverter. Ph.D. Thesis, Chongqing University, Chongqing, China, 2014. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Chen, Z. Autonomous control of inverter interfaced DG units for harmonic current filtering and resonance damping in an islanded microgrid. IEEE Trans. Ind. Appl. 2014, 50, 452–461. [Google Scholar] [CrossRef]
- Jadhav, G.N.; Changan, D.D. Modeling of inverter for stability analysis of microgrid. In Proceedings of the IEEE 7th Power India International Conference (PIICON), Bikaner, India, 25–27 November 2016; pp. 1–6. [Google Scholar]
- Xiong, X.F.; Chen, K.; Zheng, W.; Shen, Z.J.; Shahzad, N.M. Photovoltaic inverter model identification based on least squares method. Power Syst. Prot. Control 2012, 22, 52–57. [Google Scholar]
- Jin, Y.Q.; Ju, P.; Pan, X.P. A stepwise method to identify controller parameters of photovoltaic inverter. Power Syst. Technol. 2015, 39, 594–600. [Google Scholar]
- Zheng, W.; Xiong, X.F. A model identification method for photovoltaic grid-connected inverters based on the Wiener model. Proc. CSEE 2013, 33, 18–26. [Google Scholar]
- Zheng, W.; Xiong, X.F. System identification for NARX model of photovoltaic grid-connected inverter. Power Syst. Technol. 2013, 39, 2440–2445. [Google Scholar]
- Valdivia, V.; Barrado, A.; Lázaro, A.; Sanz, M.; del Moral, D.L.; Raga, C. Black-Box behavioral modeling and identification of DC–DC converters with input current control for fuel cell power conditioning. IEEE Trans. Ind. Electron. 2014, 61, 1891–1903. [Google Scholar] [CrossRef]
- Frances, A.; Asensi, R.; Garcia, O.; Prieto, R.; Uceda, J. How to model a DC microgrid: towards an automated solution. In Proceedings of the IEEE Second International Conference on DC Microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017. [Google Scholar]
- Valdivia, V.; Lazaro, A.; Barrado, A.; Zumel, P.; Fernandez, C.; Sanz, M. Black-box modeling of three-phase voltage source inverters for system-level analysis. IEEE Trans. Ind. Electron. 2012, 59, 3648–3662. [Google Scholar] [CrossRef]
- Valdivia, V.; Todd, R.; Bryan, F.J.; Barrado, A.; Lázaro, A.; Forsyth, A.J. Behavioral modeling of a switched reluctance generator for aircraft power systems. IEEE Trans. Ind. Electron. 2014, 61, 2690–2699. [Google Scholar] [CrossRef]
- Francés, R.; Asensi, R.; García, O.; Prieto, R.; Uceda, J. The performance of polytopic models in smart DC microgrids. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Erlinghagen, P.; Wippenbeck, T.; Schnettler, A. Modelling and sensitivity analyses of equivalent models of low voltage distribution grids with high penetration of DG. In Proceedings of the 50th International Universities Power Engineering Conference (UPEC), Stoke on Trent, UK, 1–4 September 2015; pp. 1–5. [Google Scholar]
- Francés, A.; Asensi, R.; García, O.; Uceda, J. A blackbox large signal Lyapunov-based stability analysis method for power converter-based systems. In Proceedings of the IEEE 17th Workshop on Control and Modeling for Power Electronics (COMPEL), Trondheim, Norway, 27–30 June 2016; pp. 1–6. [Google Scholar]
- Cao, P.P.; Zhang, X.; Yang, S.Y.; Xie, Z.; Guo, L.L. Online rotor time constant identification of induction motors based on Lyapunov stability theory. Proc. CSEE 2016, 36, 3947–3955. [Google Scholar]
- Yang, S.Y.; Sun, R.; Cao, P.P.; Zhang, X. Double compound manifold sliding mode observer based rotor resistance online updating scheme for induction motor. Trans. Chin. Electrotech. Soc. 2018, 33, 3596–3606. [Google Scholar]
- Chen, J.; Liu, M.A.; Chen, X.; Niu, B.W.; Gong, C.Y. Wireless parallel and circulation current reduction of droop-controlled inverters. Trans. Chin. Electrotech. Soc. 2018, 33, 1450–1460. [Google Scholar]
- Tu, C.M.; Yang, Y.; Lan, Z.; Xiao, F.; Li, Y.T. Secondary frequency regulation strategy in microgrid based on VSG. Trans. Chin. Electrotech. Soc. 2018, 33, 2186–2195. [Google Scholar]
- Zhao, X.; Wang, Z.P.; Jia, H.H. Comparison and analysis of discretization methods for continuous systems. Ind. Inf. Technol. Educ. 2015, 12, 71–76. [Google Scholar]
- Su, Y.C. The Research of Leven-Marquadt-Fletcher Method for Fitting Transient Electromagnetic Data. Ph.D. Thesis, Jilin University, Shenyang, China, 2009. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Total Power References | Active Load | Reactive Load |
|---|---|---|---|
| t1 | 0/0 | 0 | 0 |
| t2 | 0/0 | 12 kW | 20 kVar |
| t3 | 60 kW/40 kVar | 12 kW | 20 kVar |
| t4 | 100 kW/60 kVar | 12 kW | 20 kVar |
| t5 | 60 kW/40 kVar | 12 kW | 20 kVar |
| t6 | 60 kW/40 kVar | 8 kW | 10 kVar |
| t7 | 60 kW/40 kVar (INV1 shutdown) | 8 kW | 10 kVar |
| t8 | 60 kW/40 kVar (INV1 start up) | 8 kW | 10 kVar |
| t9 | 0/0 | 8 kW | 10 kVar |
| t10 | 0/0 | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Xu, D.; Su, J.; Liu, N.; Yu, H.; Xu, H. Black-Box Behavioral Modeling of Voltage and Frequency Response Characteristic for Islanded Microgrid. Energies 2019, 12, 2049. https://doi.org/10.3390/en12112049
Shi Y, Xu D, Su J, Liu N, Yu H, Xu H. Black-Box Behavioral Modeling of Voltage and Frequency Response Characteristic for Islanded Microgrid. Energies. 2019; 12(11):2049. https://doi.org/10.3390/en12112049
Chicago/Turabian StyleShi, Yong, Dong Xu, Jianhui Su, Ning Liu, Hongru Yu, and Huadian Xu. 2019. "Black-Box Behavioral Modeling of Voltage and Frequency Response Characteristic for Islanded Microgrid" Energies 12, no. 11: 2049. https://doi.org/10.3390/en12112049
APA StyleShi, Y., Xu, D., Su, J., Liu, N., Yu, H., & Xu, H. (2019). Black-Box Behavioral Modeling of Voltage and Frequency Response Characteristic for Islanded Microgrid. Energies, 12(11), 2049. https://doi.org/10.3390/en12112049