Modeling and Mechanism Investigation of Inertia and Damping Issues for Grid-Tied PV Generation Systems with Droop Control


Abstract
:1. Introduction
2. Research Ideas and Methods
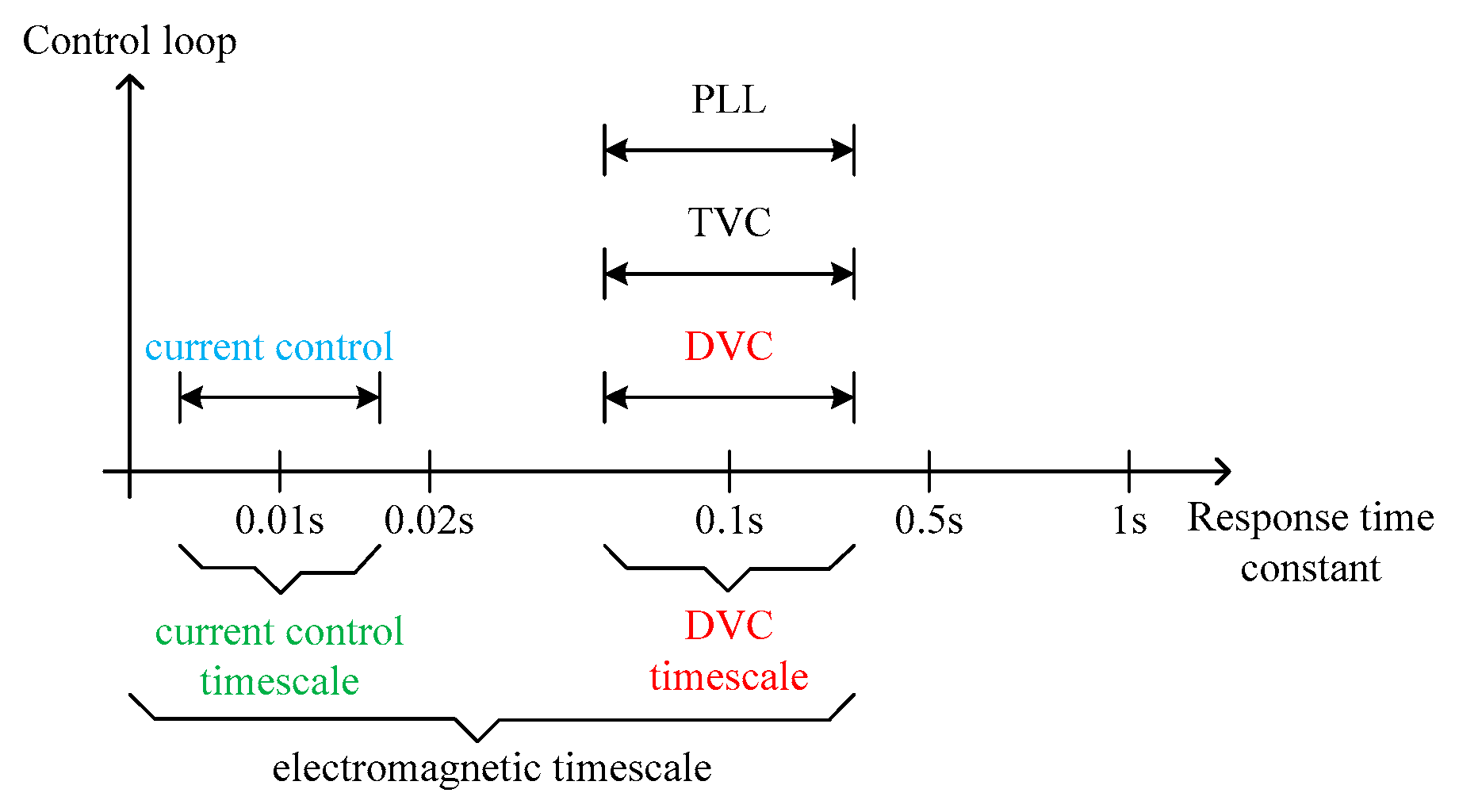
2.1. Definition of DVC Timescale in the GPVGS
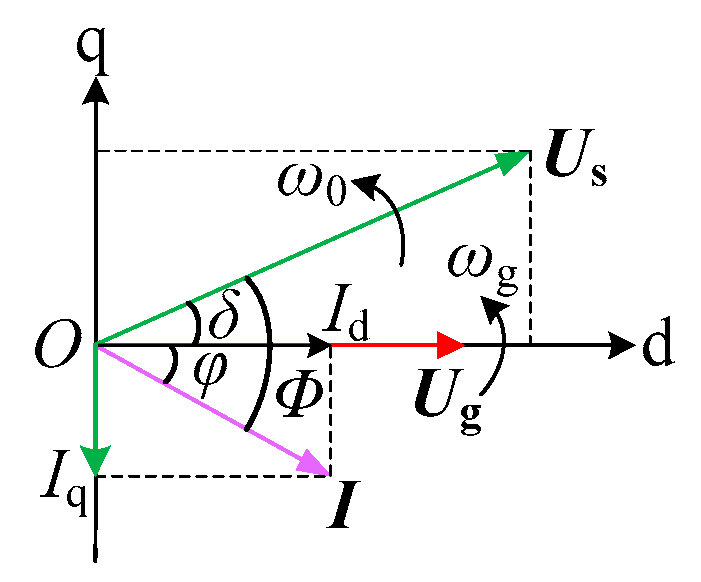
2.2. Electrical Torque Analysis Method
3. The Control Strategy of System
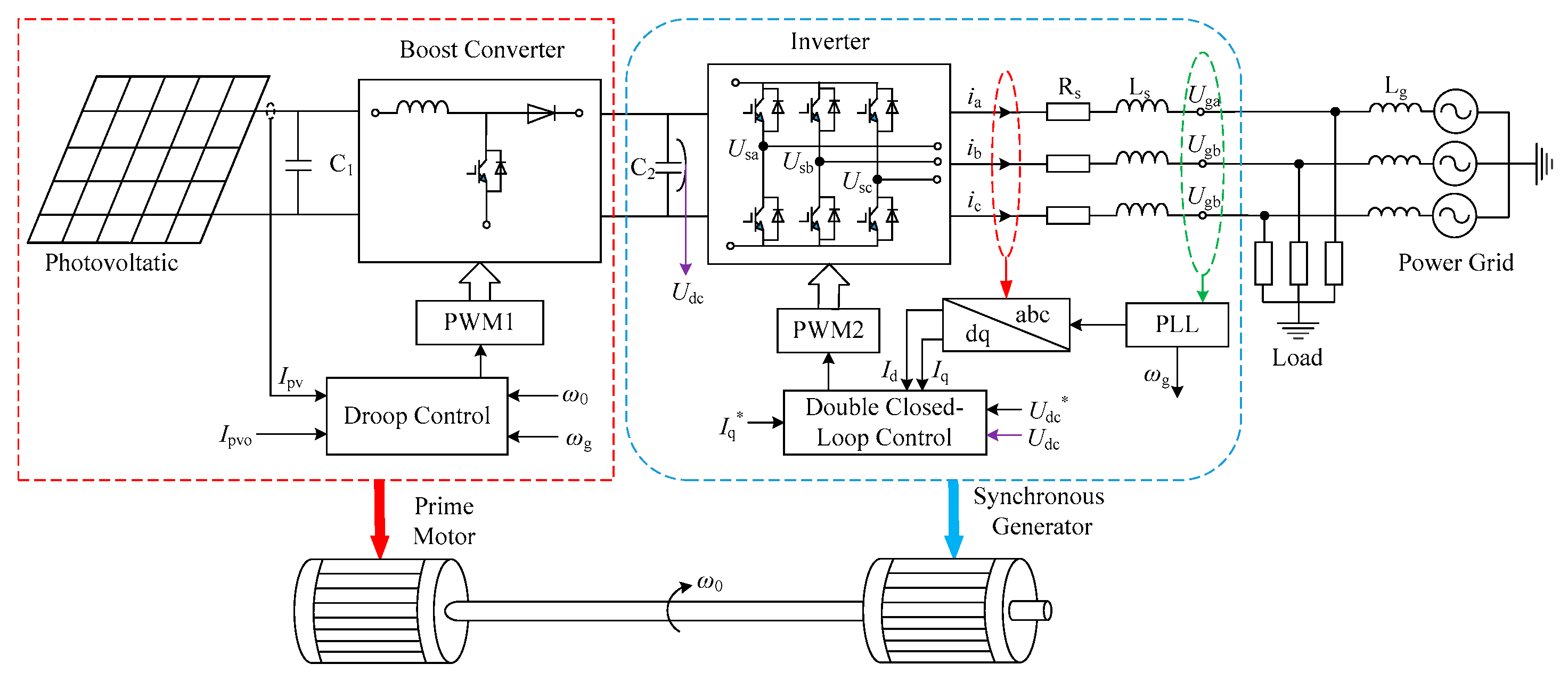
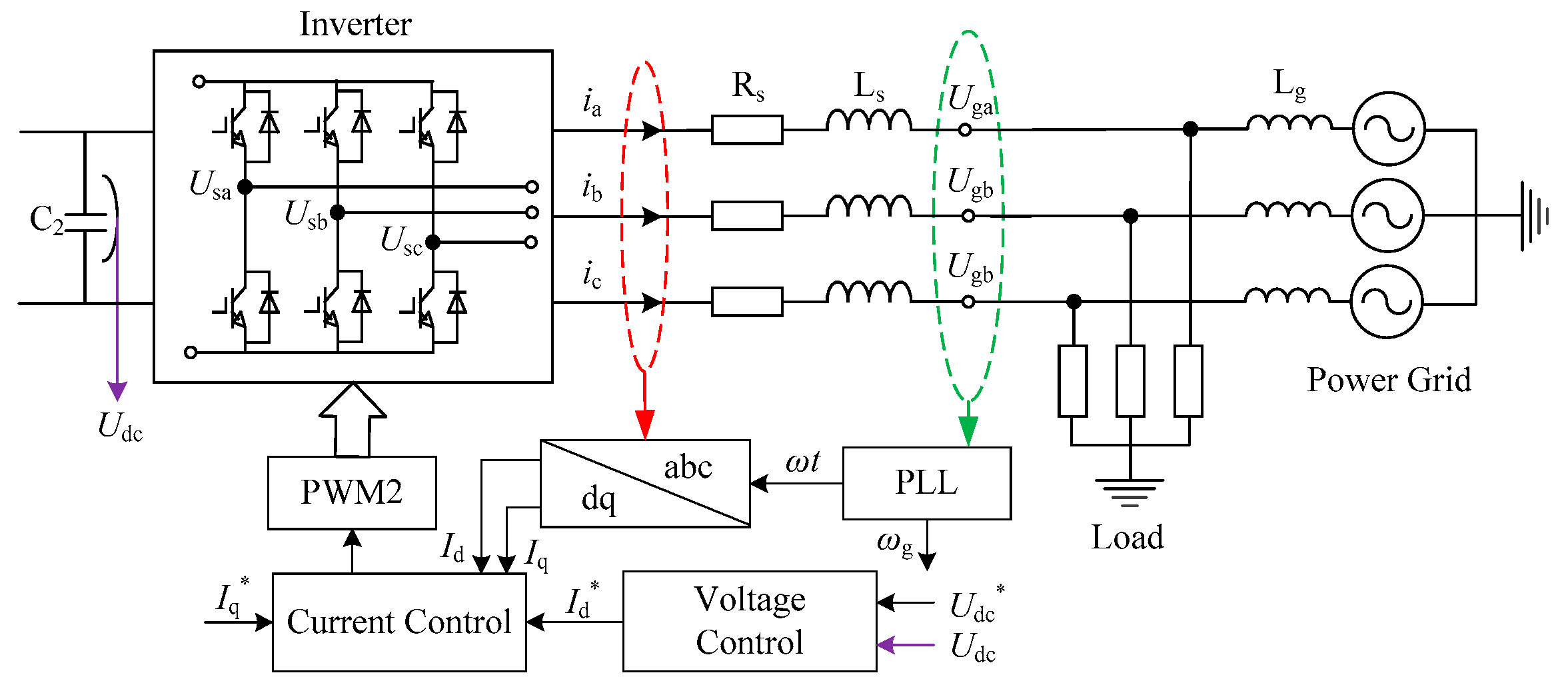
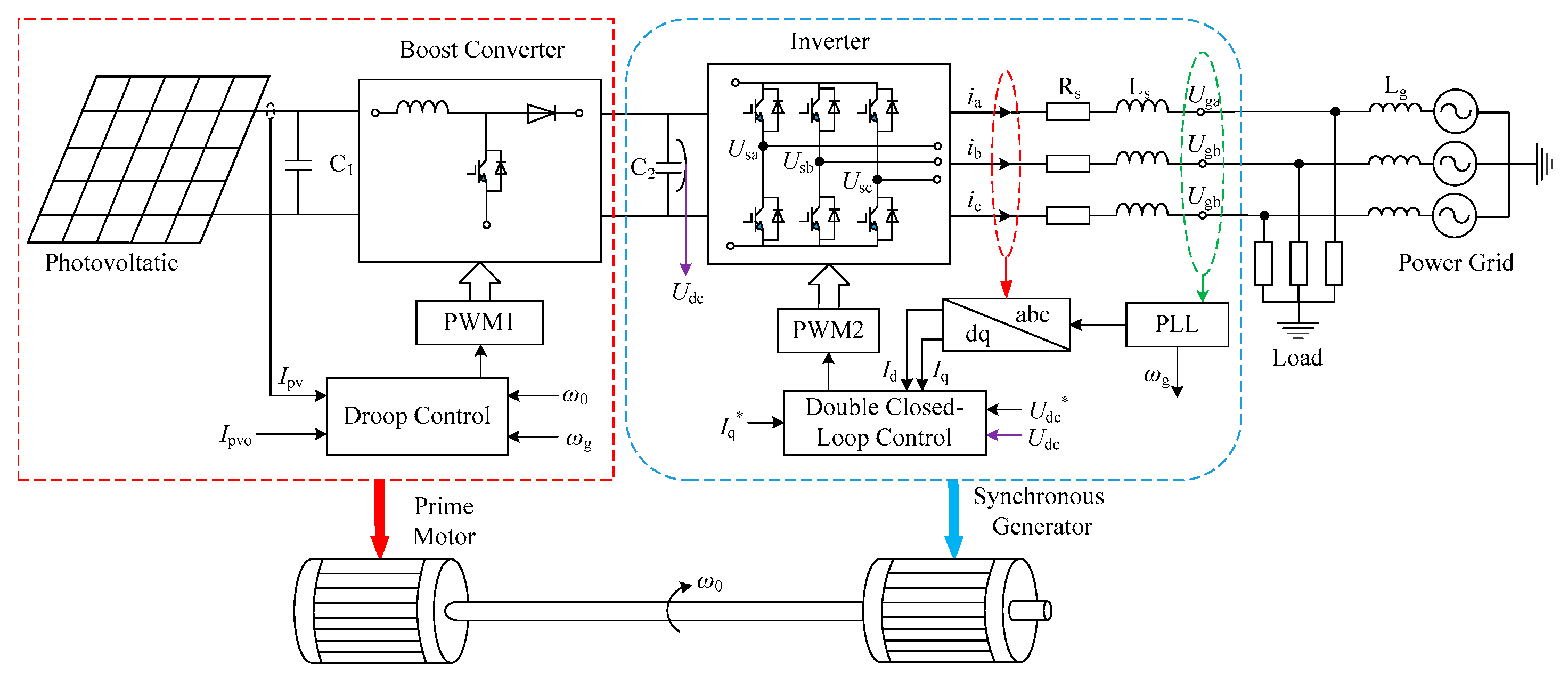
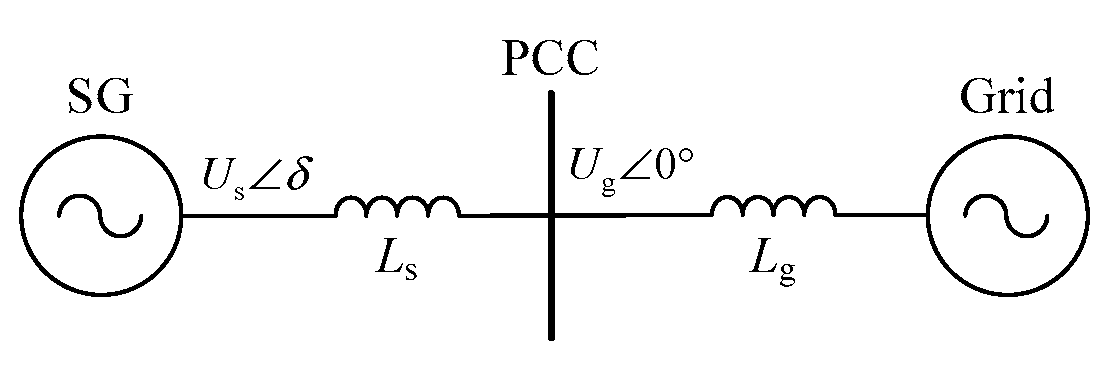
3.1. System Description
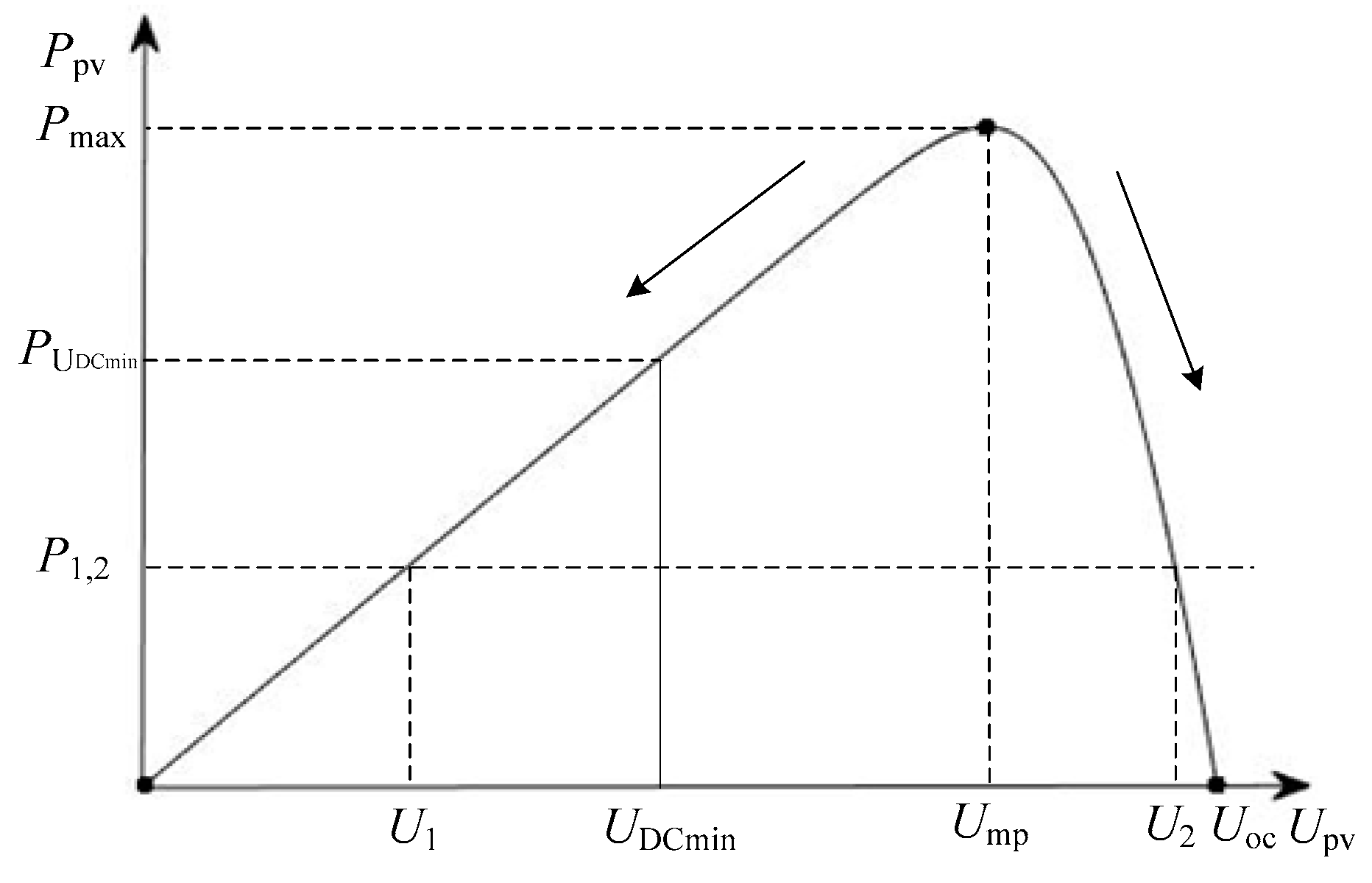
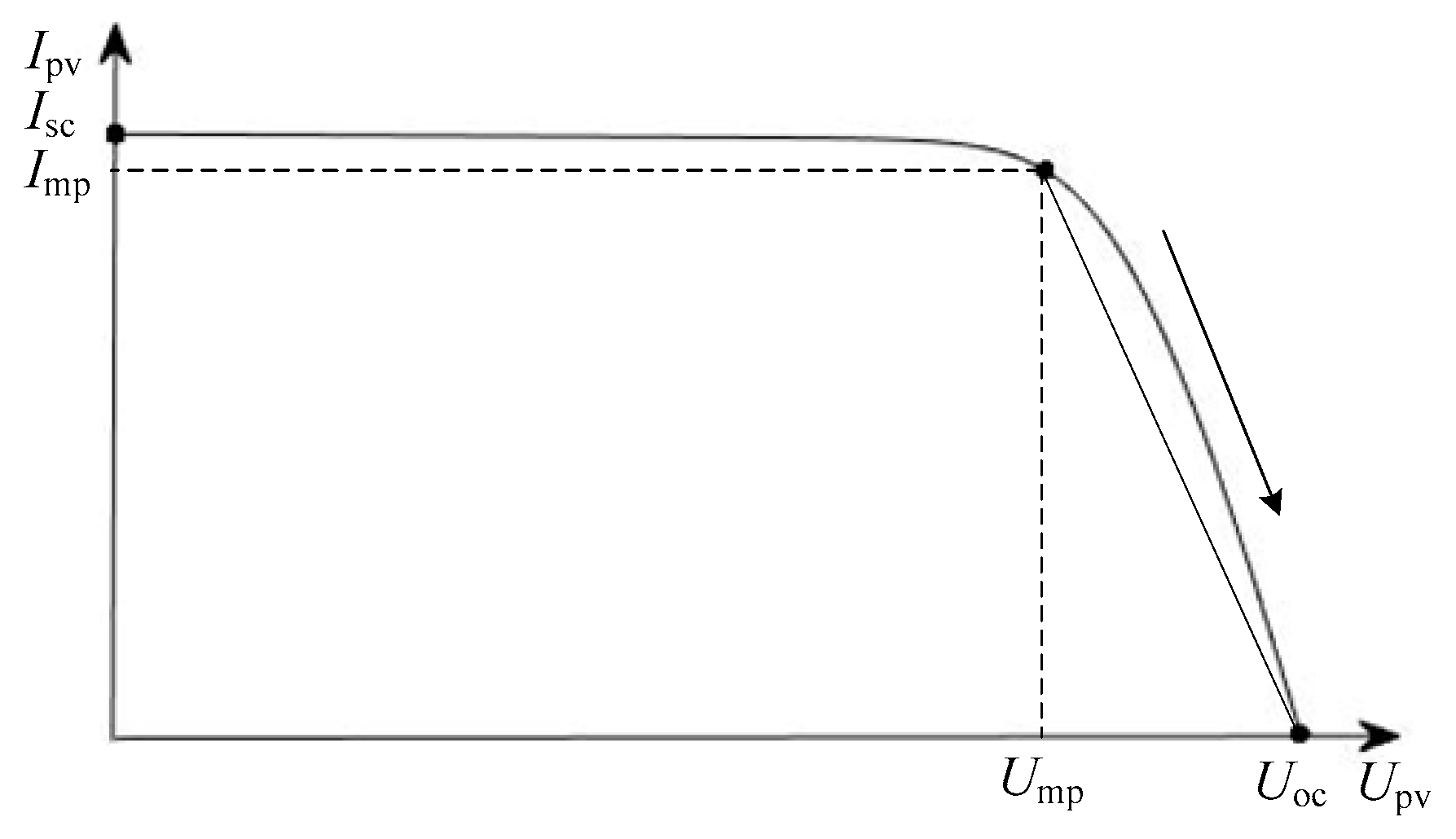
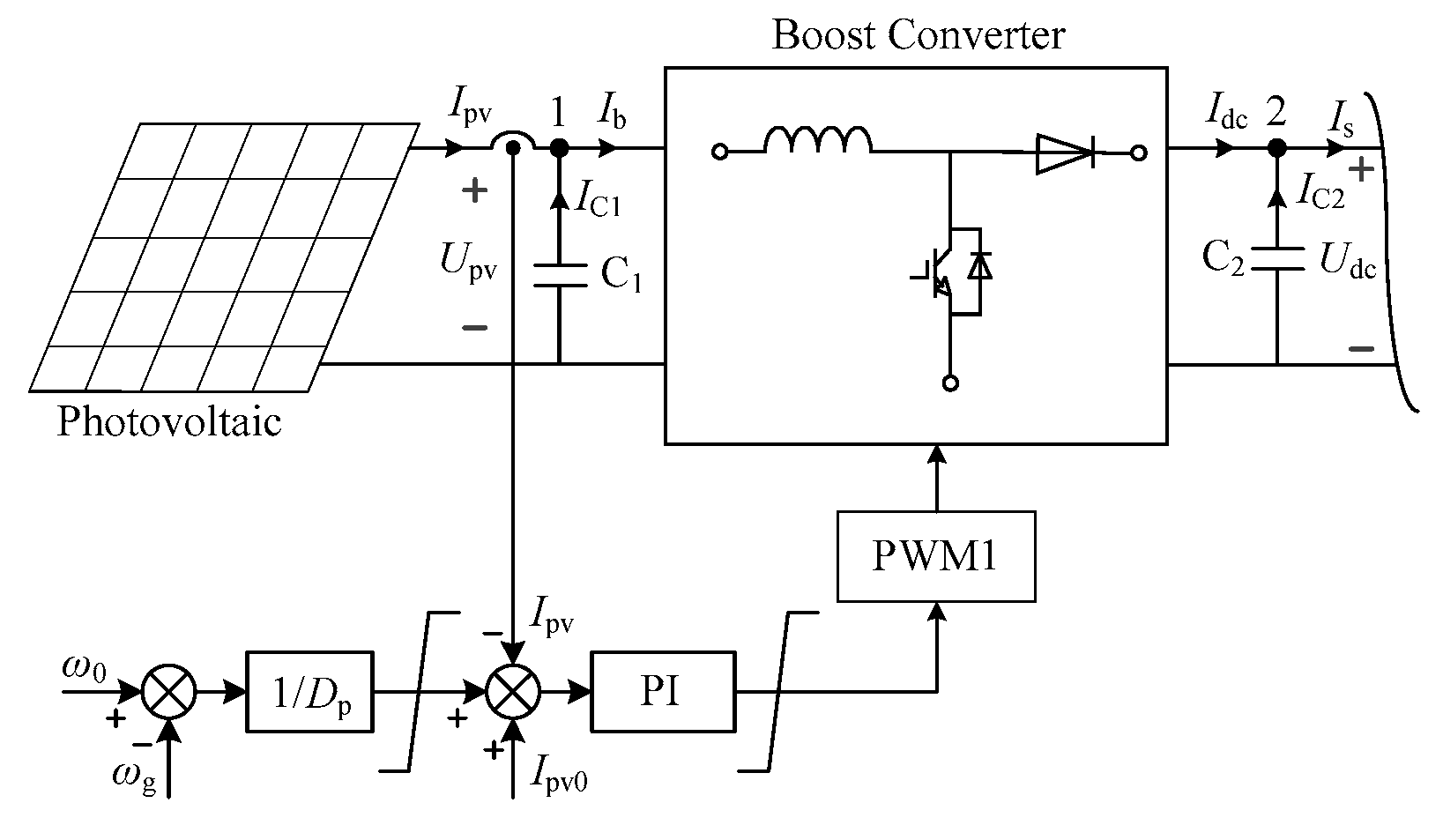
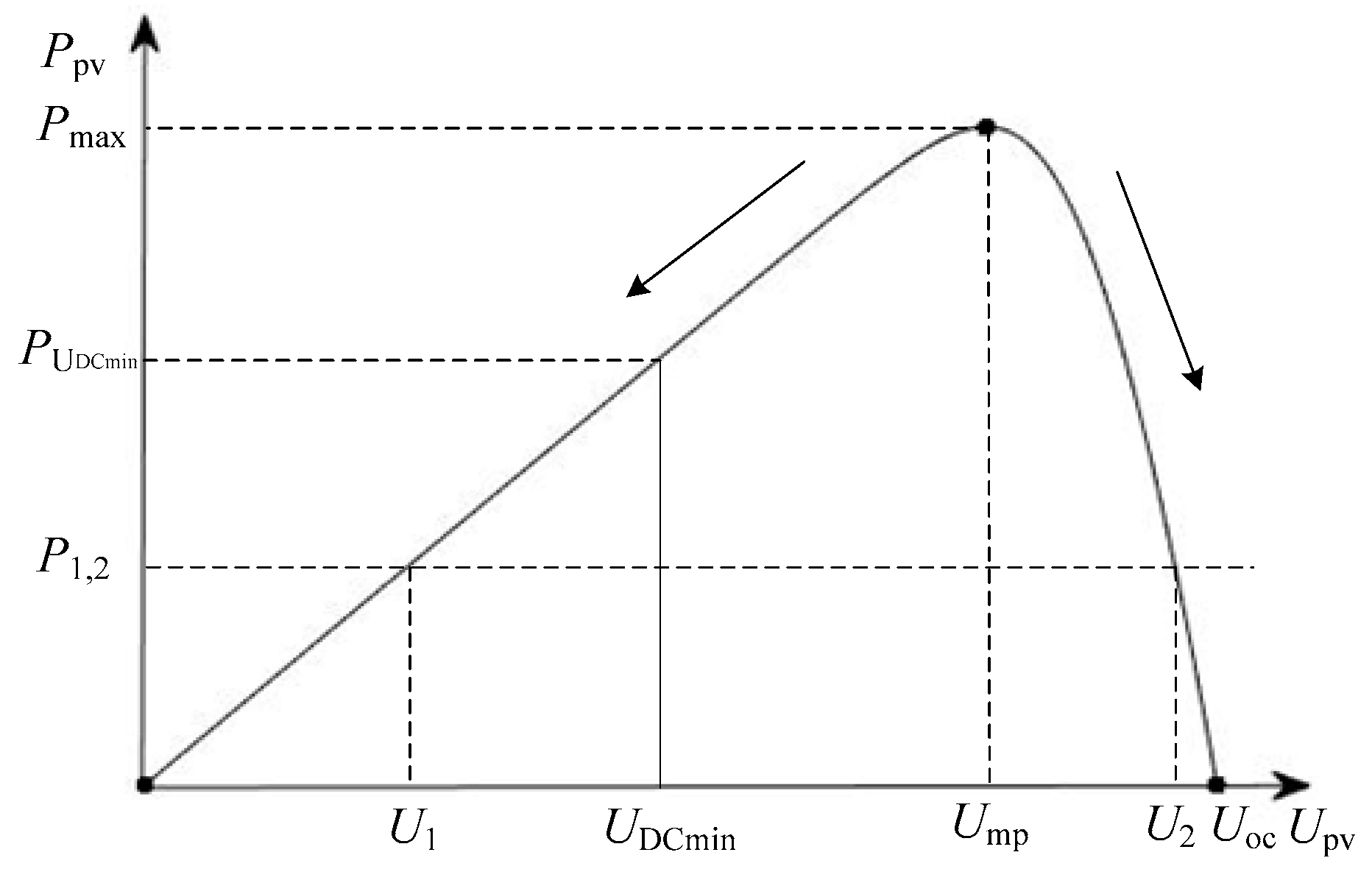
3.2. The Control Strategy of Boost Converter
3.3. The Control Strategy of Grid-Connected Inverter
4. Dynamic Characteristics Analysis of the GPVGS
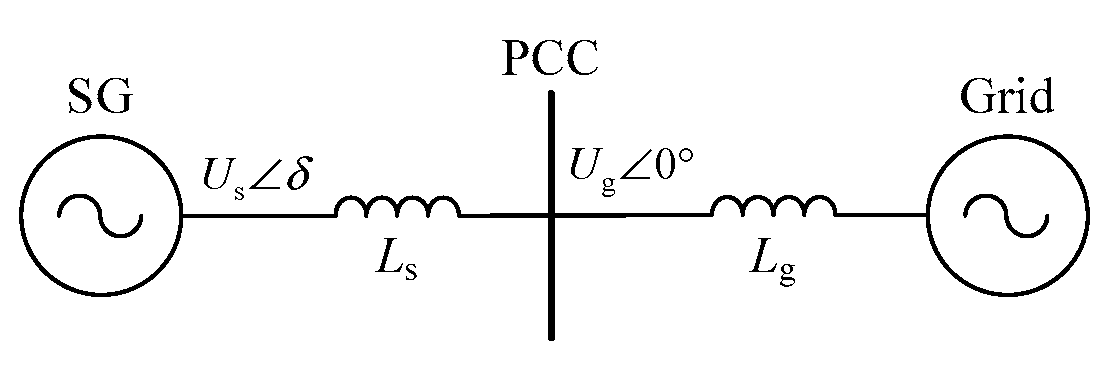
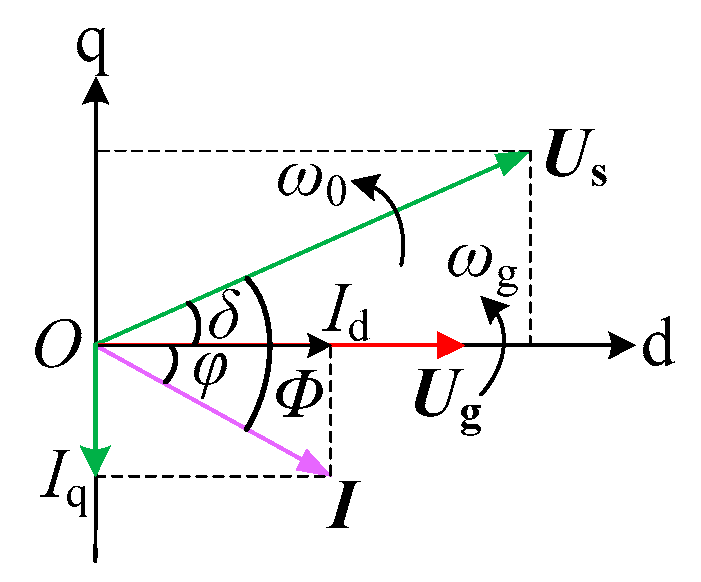
4.1. SSG Model of the GPVGS
4.2. The Physical law of the System Dynamic Characteristics
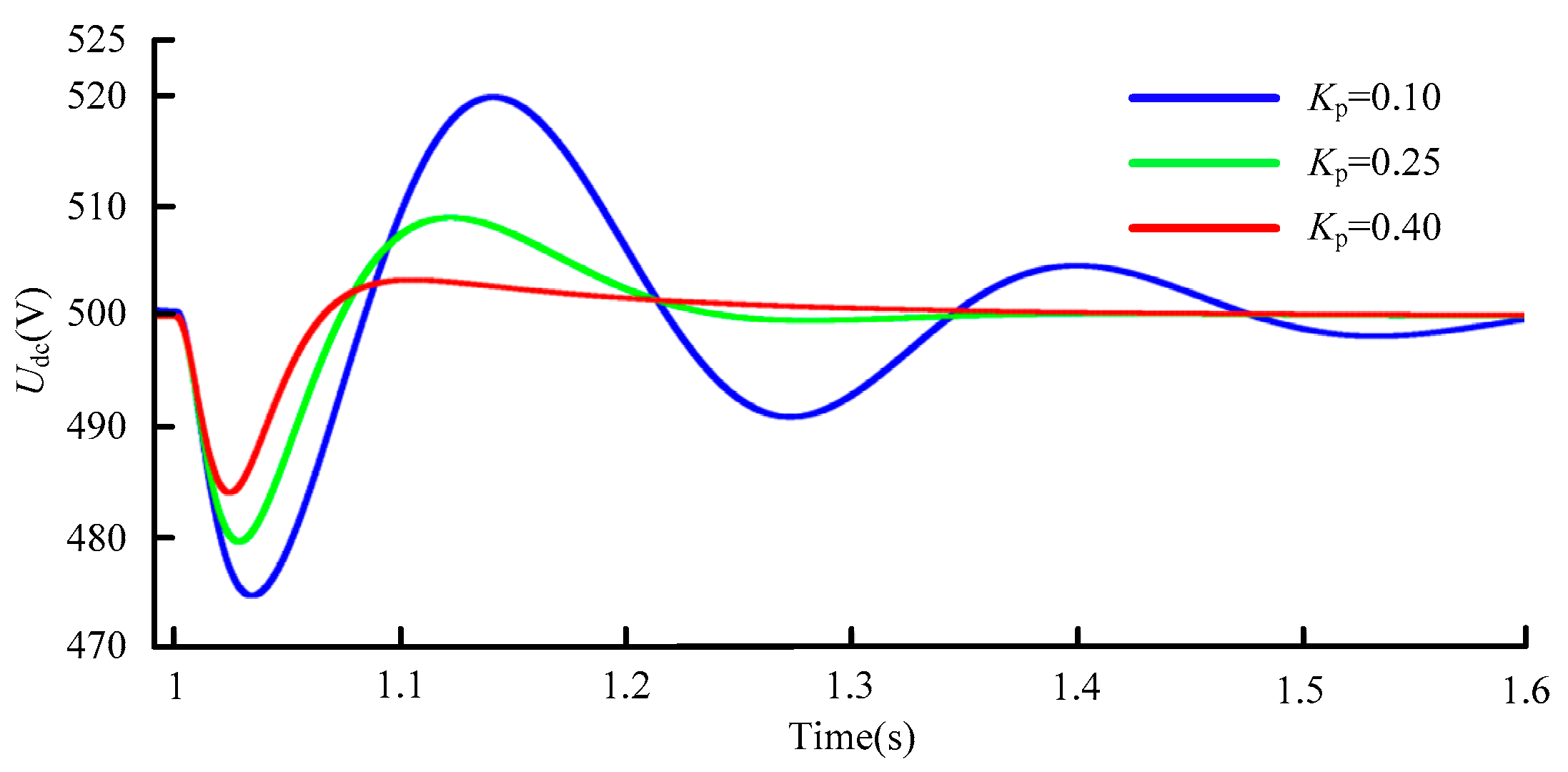
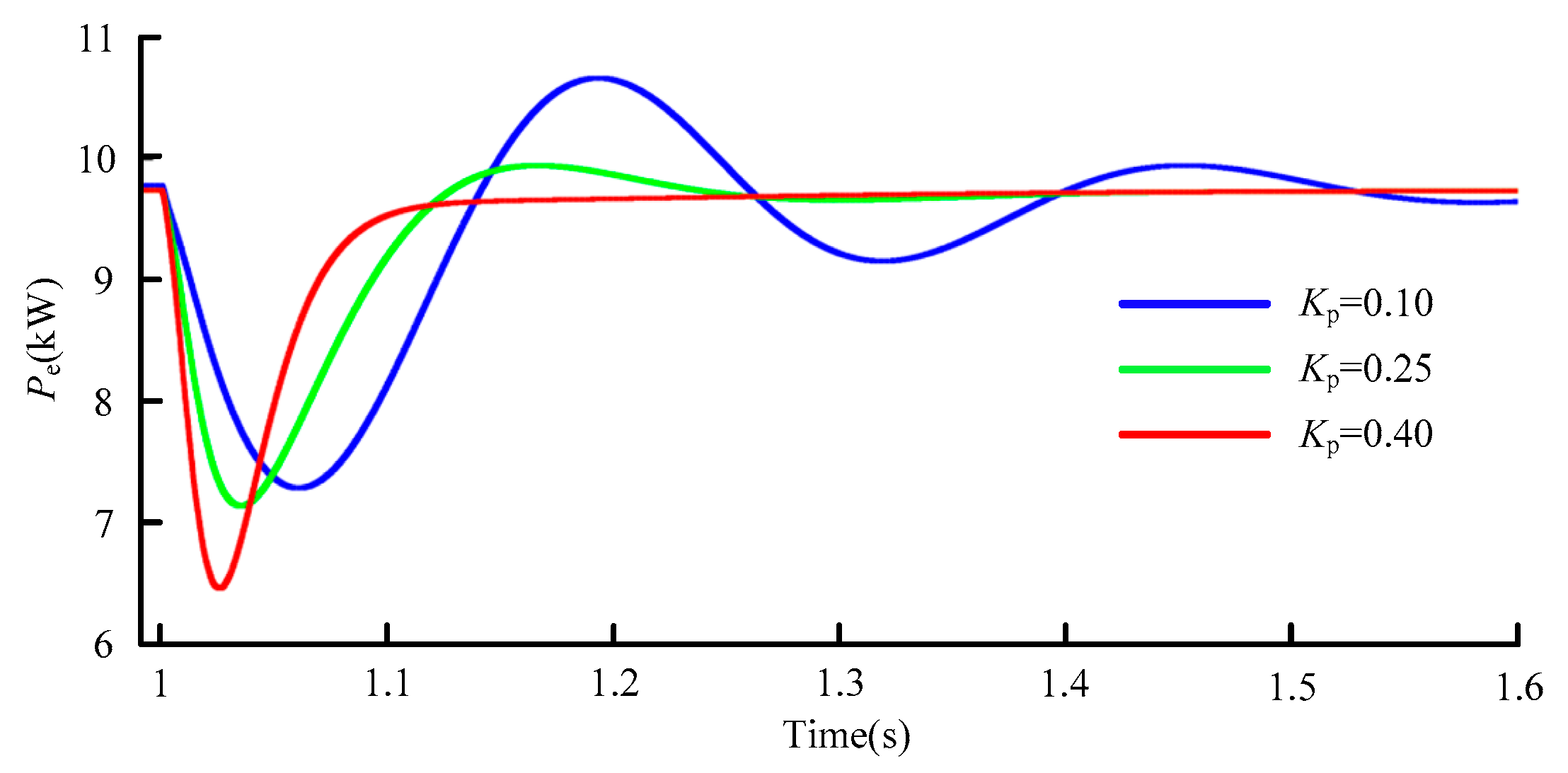
4.2.1. Influence of Control Parameters
4.2.2. Influence of Structural Parameters
4.2.3. Influence of Steady-State Operating Point Parameters
5. Simulation and Experimental Verification
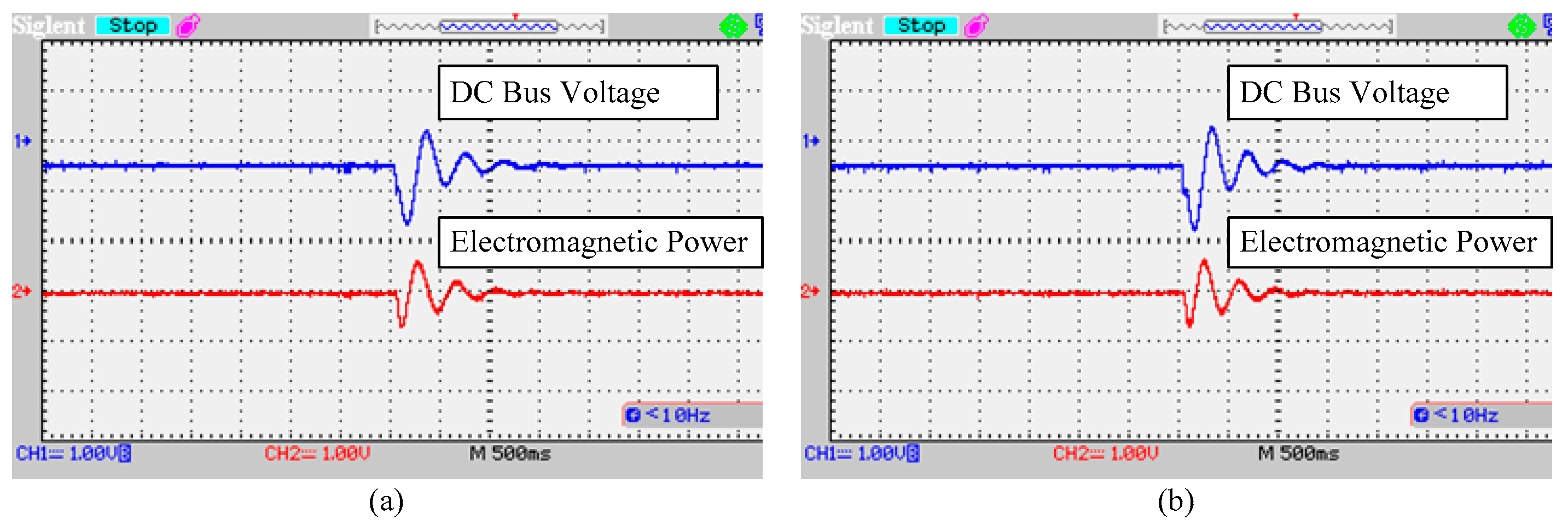
5.1. System Inertia Feature Verification
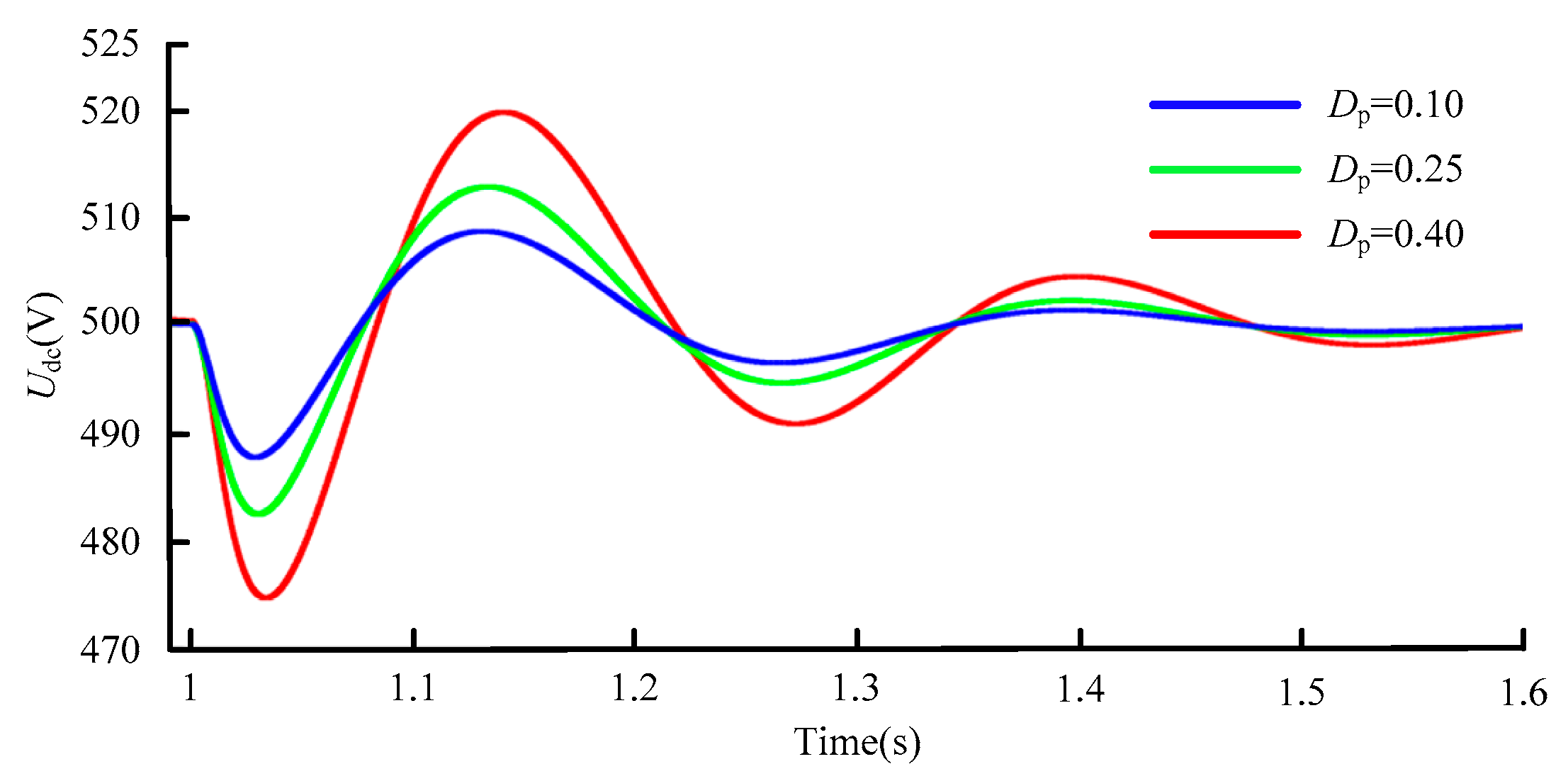
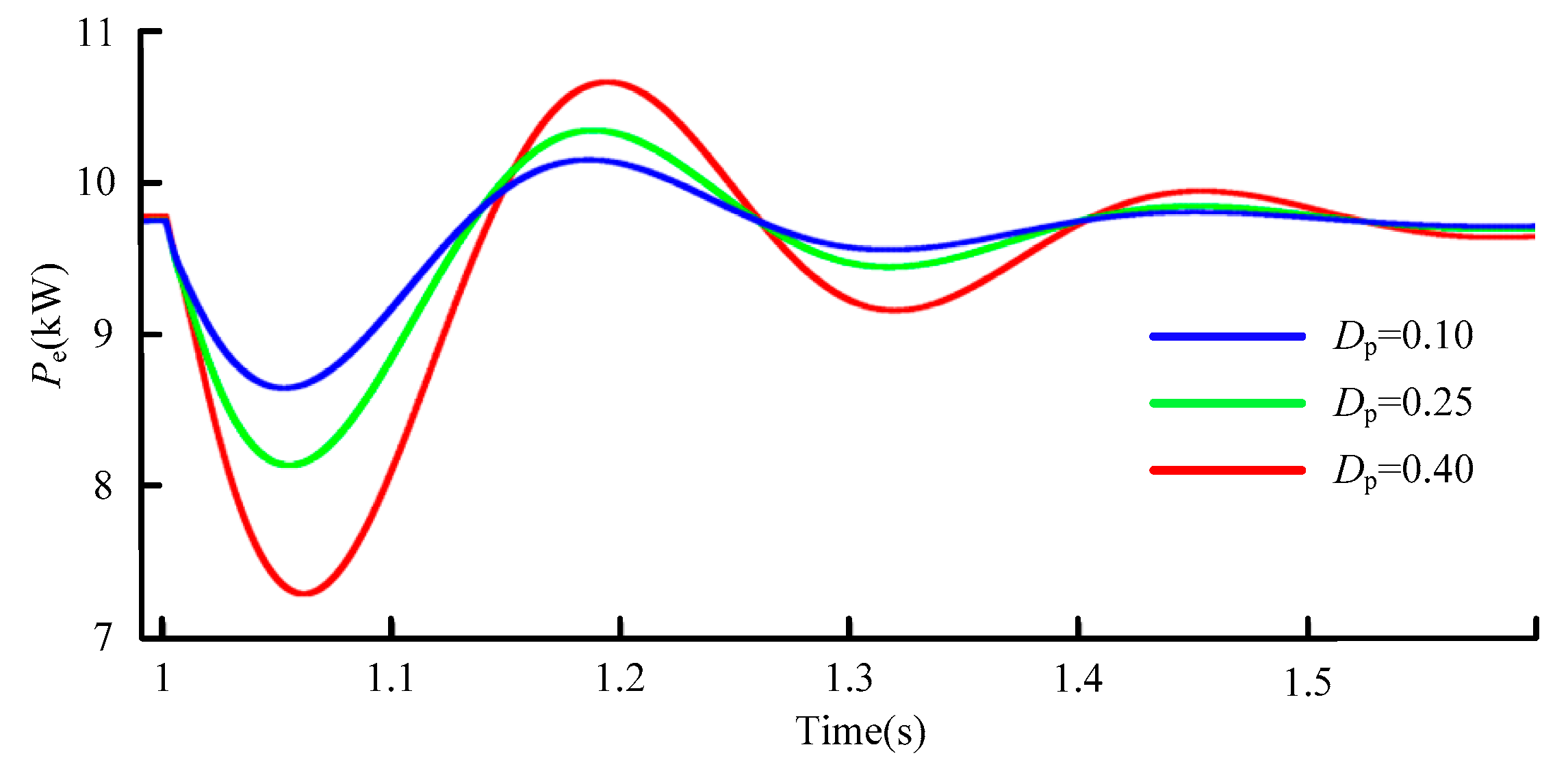
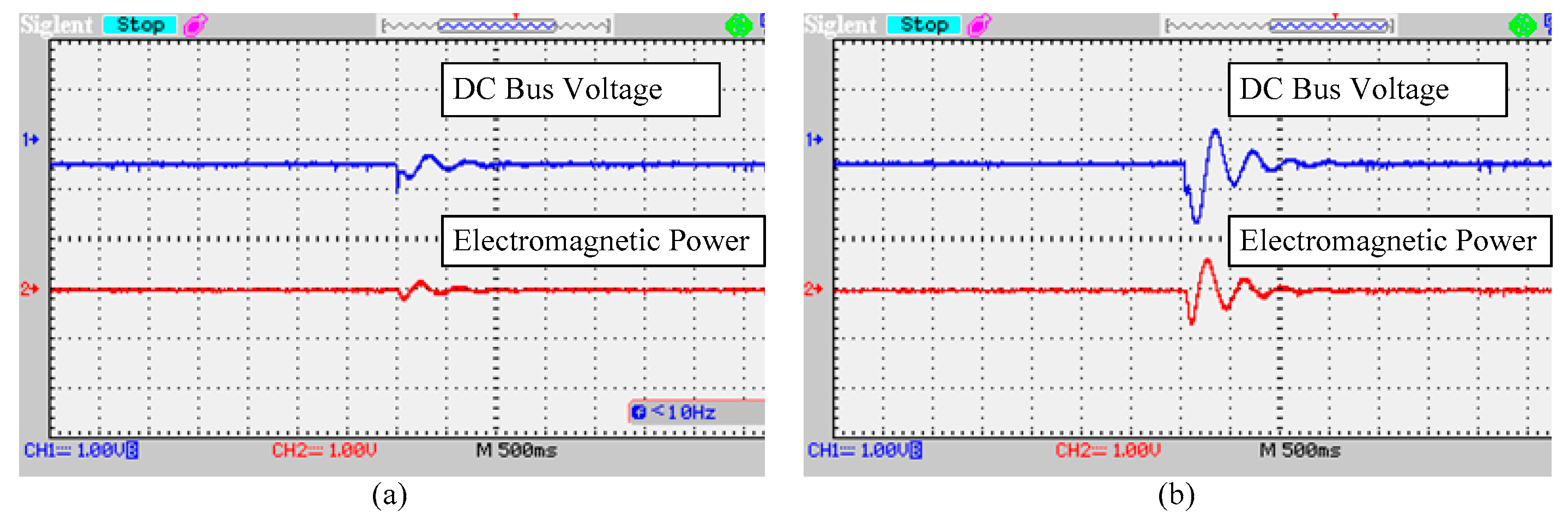
5.2. System Damping Characteristics Verification
5.3. System Synchronization Feature Verification
6. Conclusions and Future Work
- (1)
- The GPVGS based on droop control also has a certain inertia, damping and synchronization effect. At the same time, the equivalent inertia, damping and synchronization coefficient of the system are affected by the control parameters, structural parameters and steady-state operating points parameters, among which the adjustment control parameters are the simplest way to change the inertia, damping and synchronization characteristics of the system.
- (2)
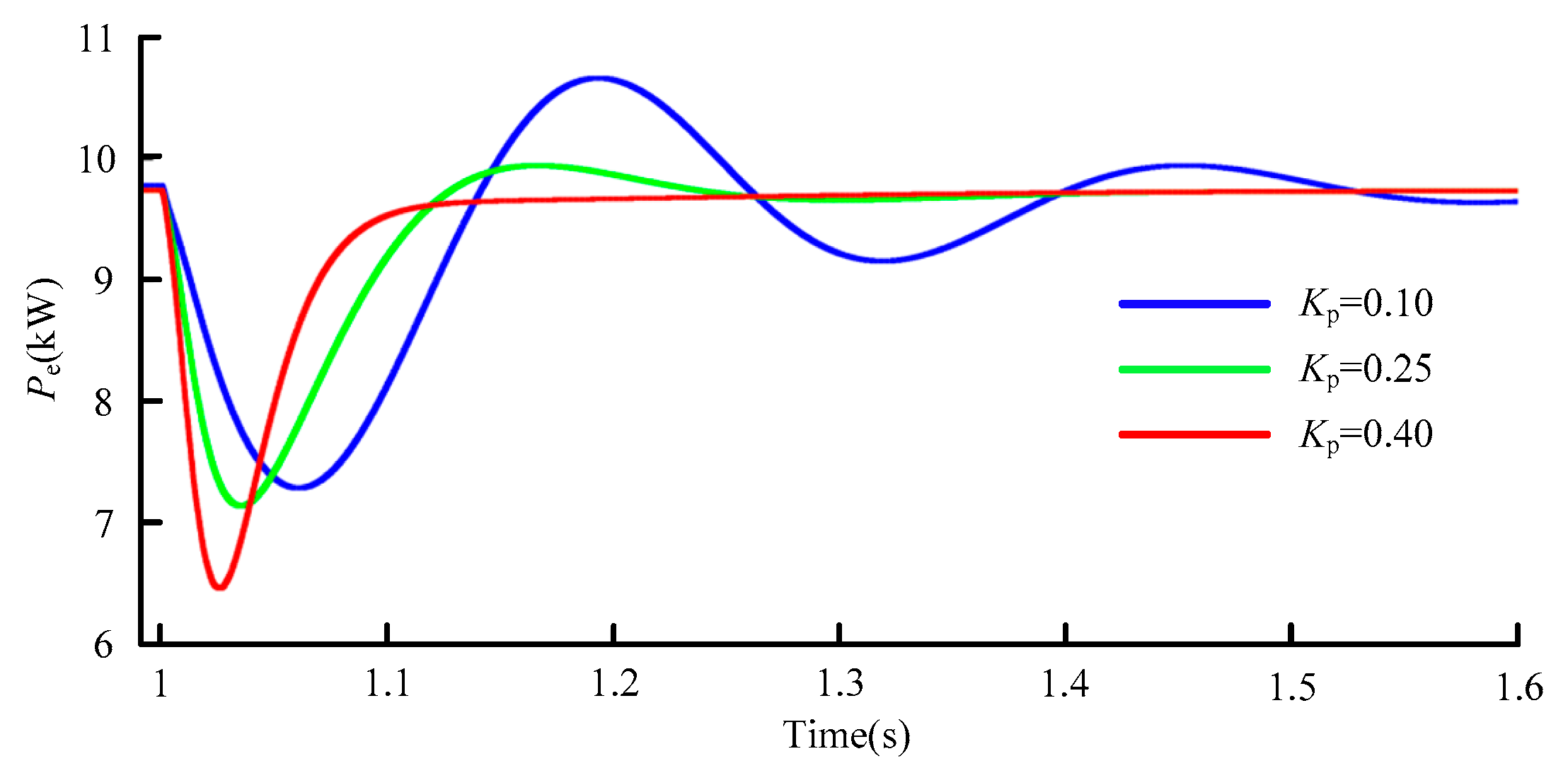
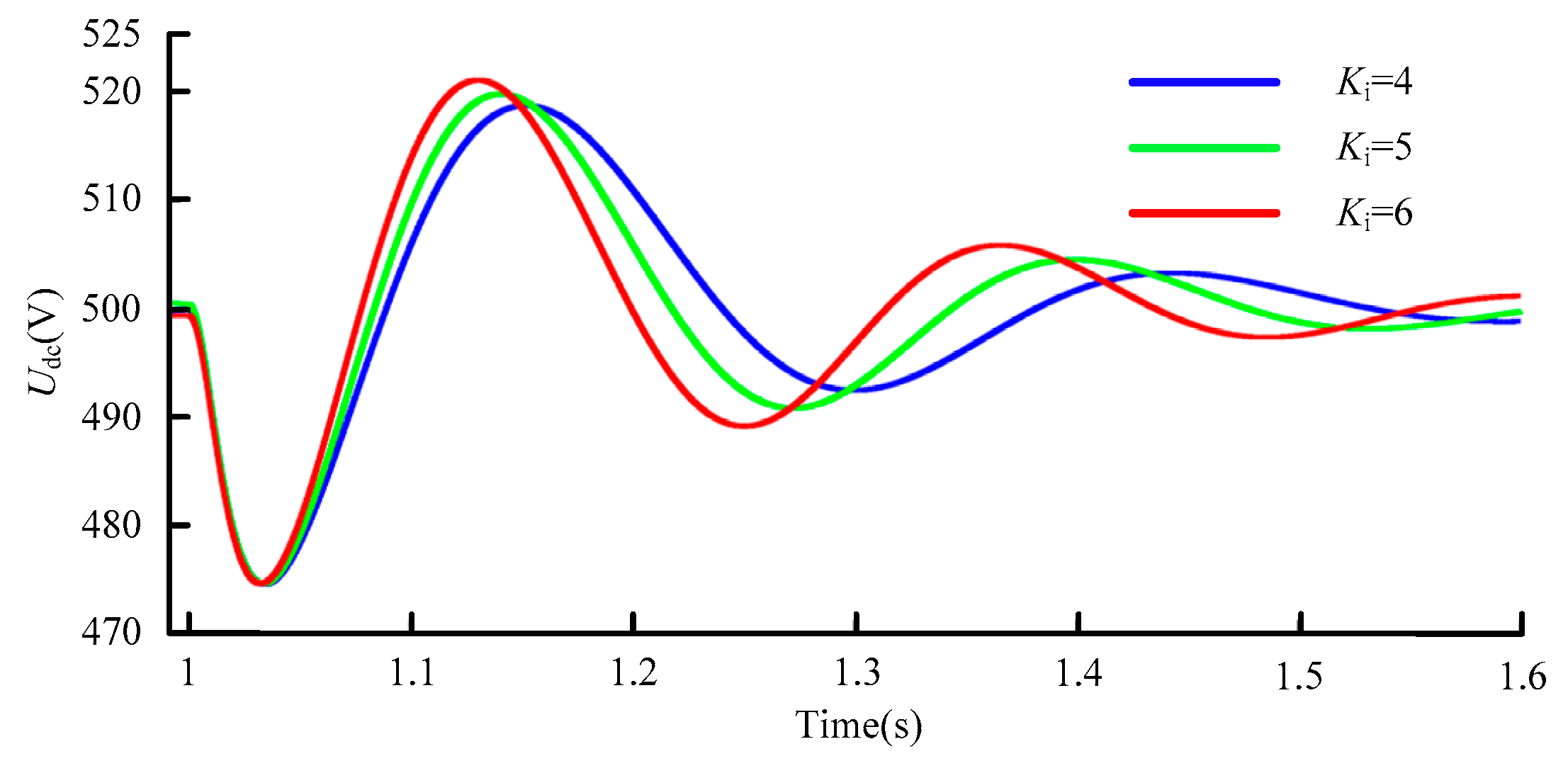
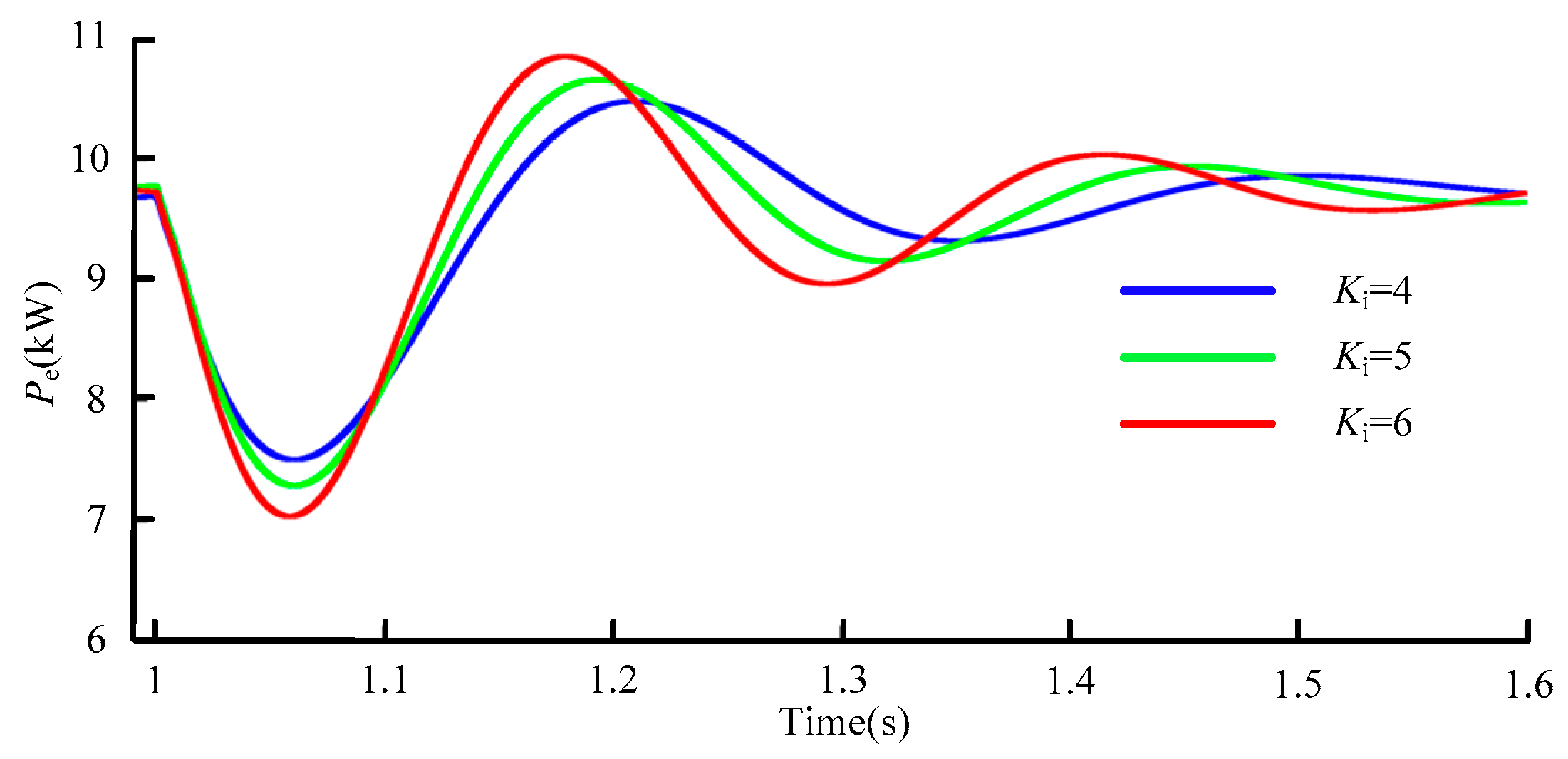
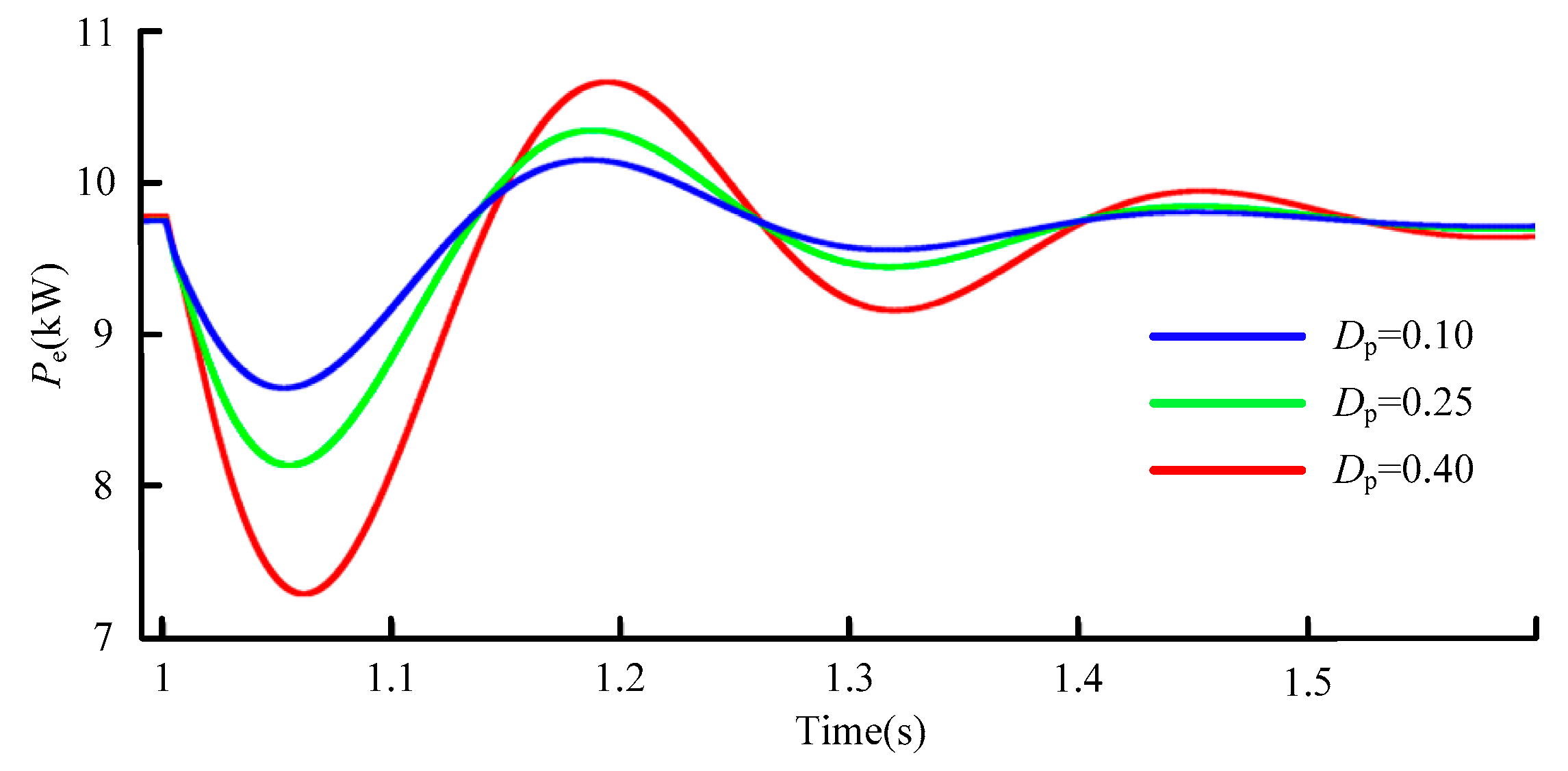
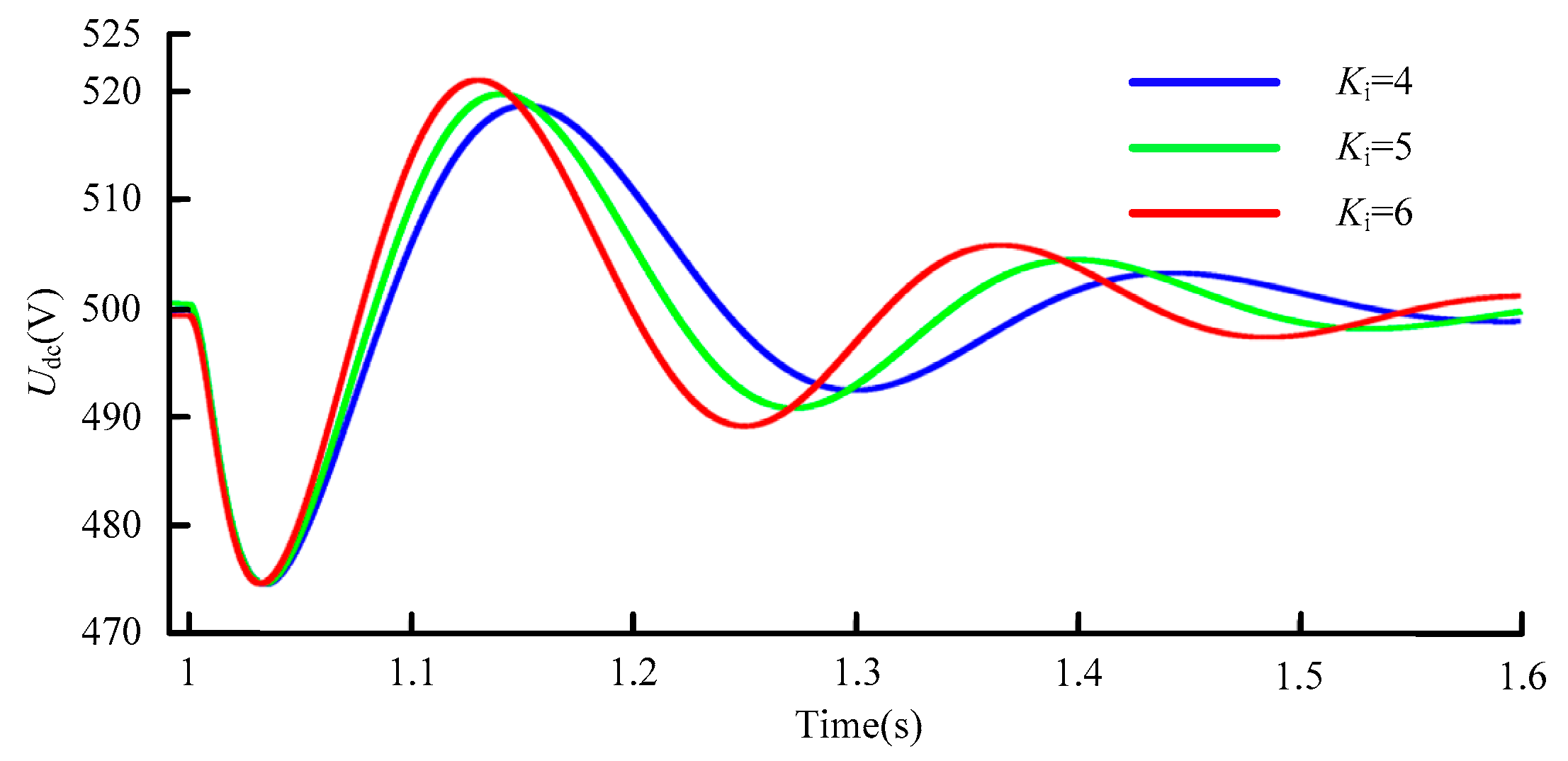
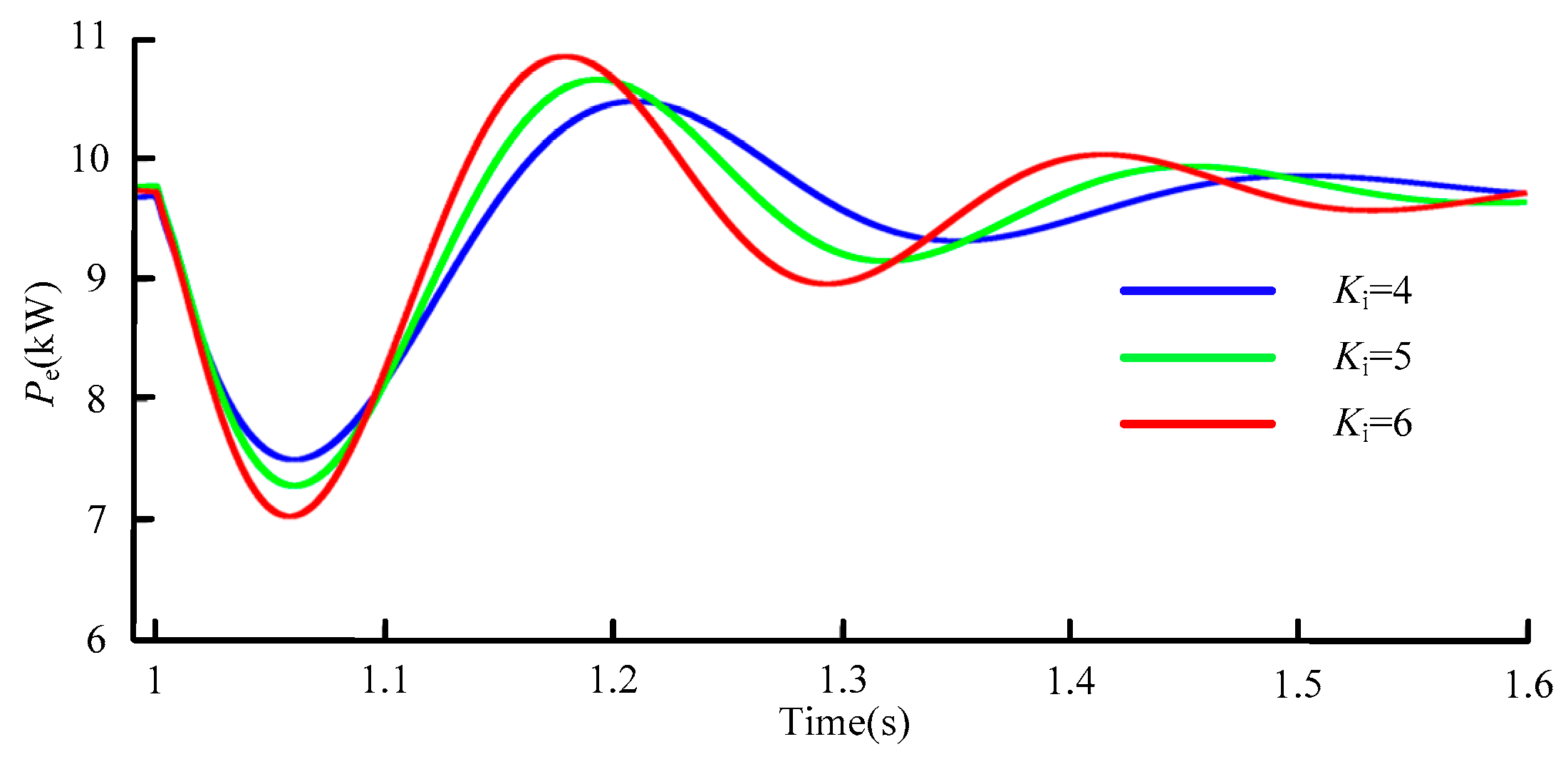
- From the perspective of control parameters, the inertia characteristics of the system are influenced by the DC voltage outer loop proportional coefficient Kp and positively correlated with Kp. The damping characteristics of the system are affected by the droop coefficient Dp and negatively correlated with Dp. The synchronization effect is only affected by the DC voltage outer loop integral coefficient Ki and positively correlated with Ki.
- (3)
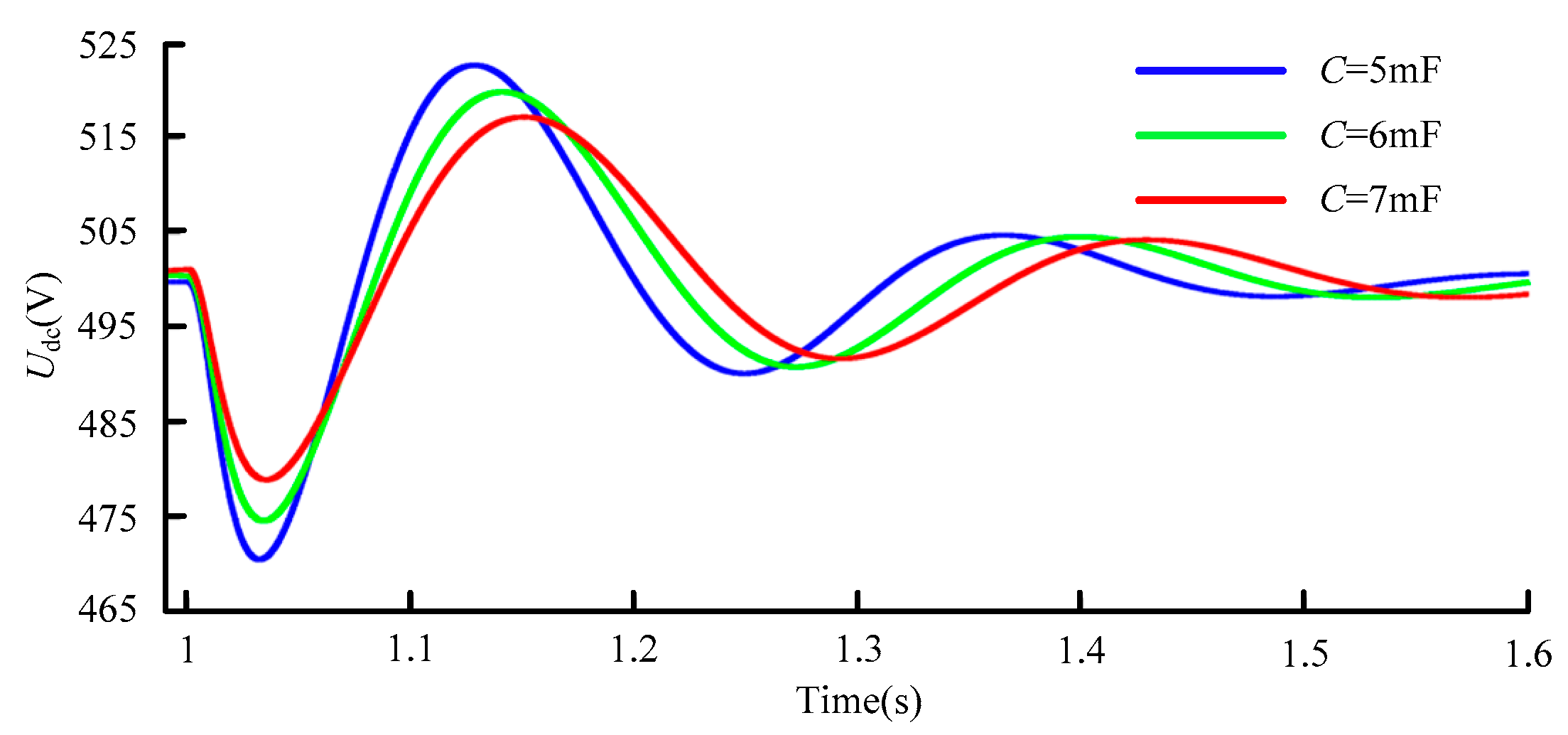
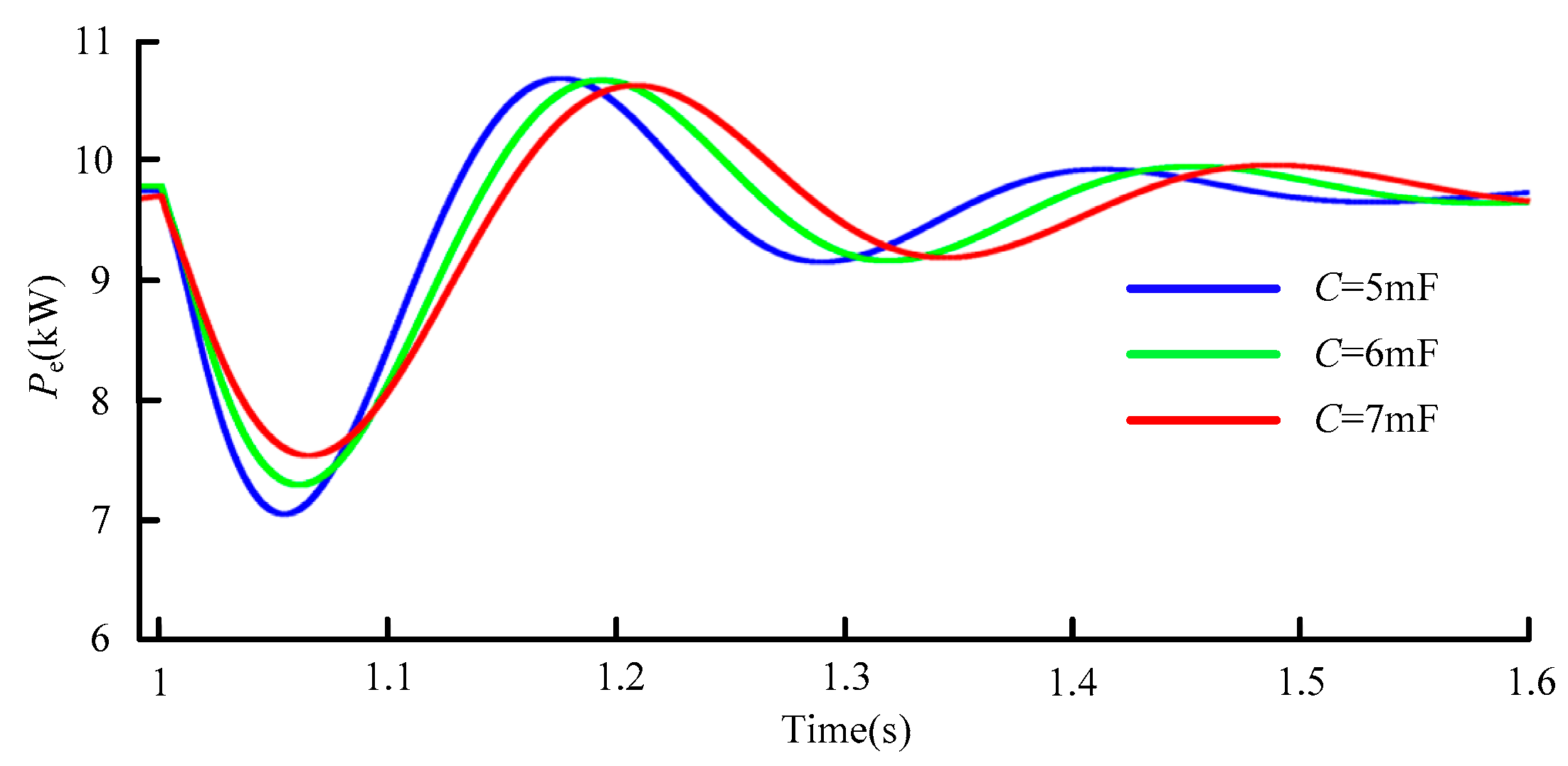
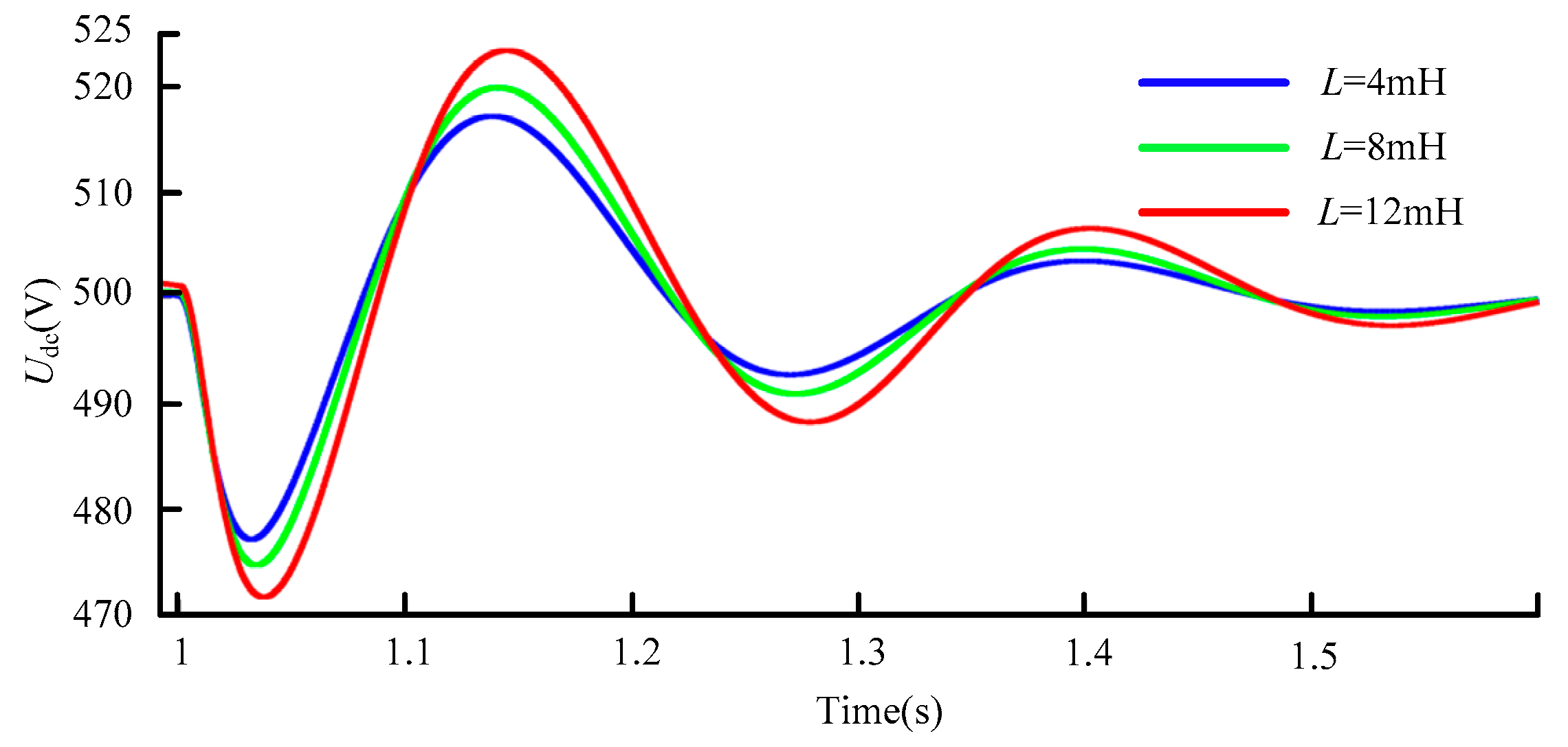
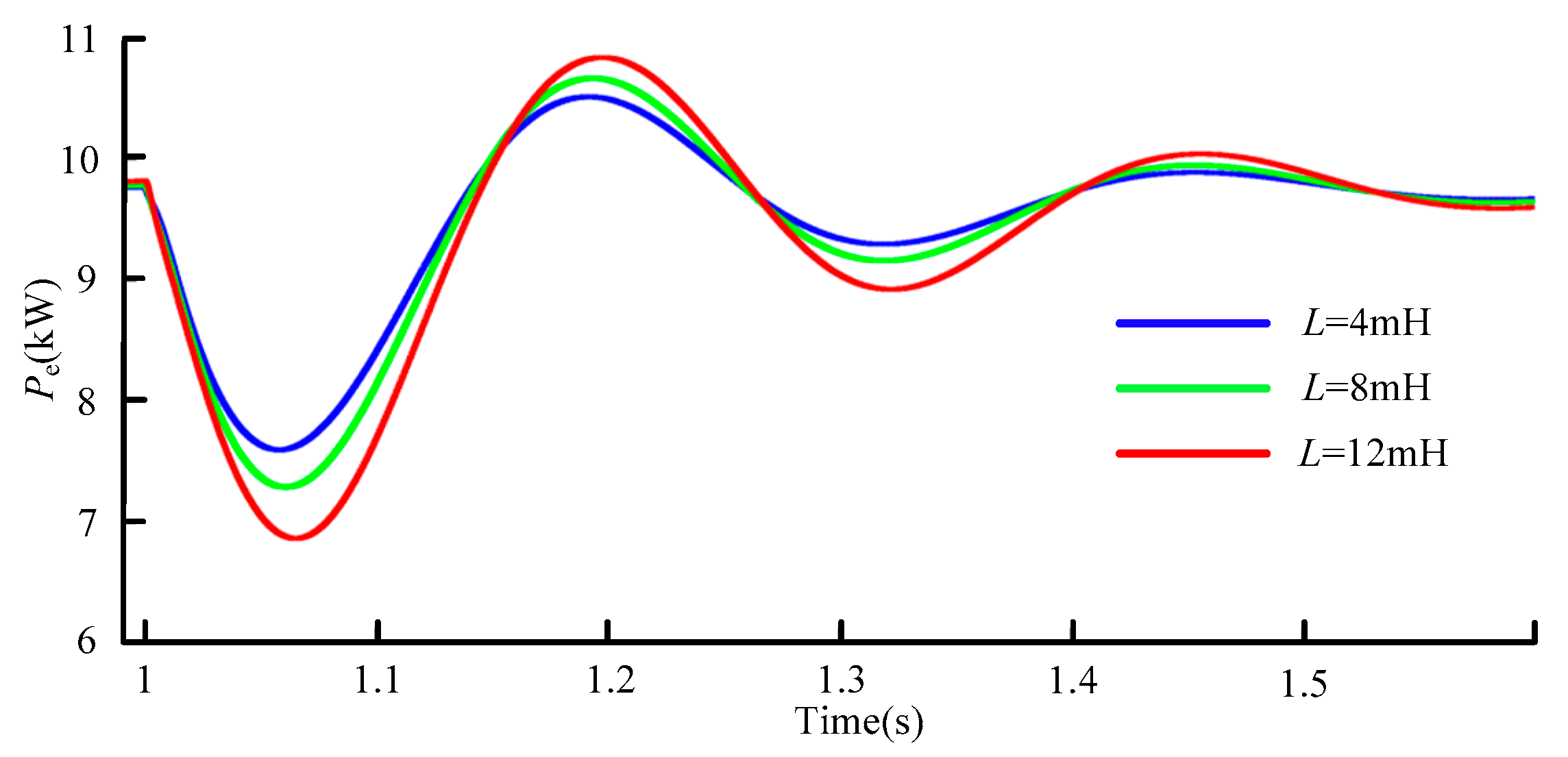
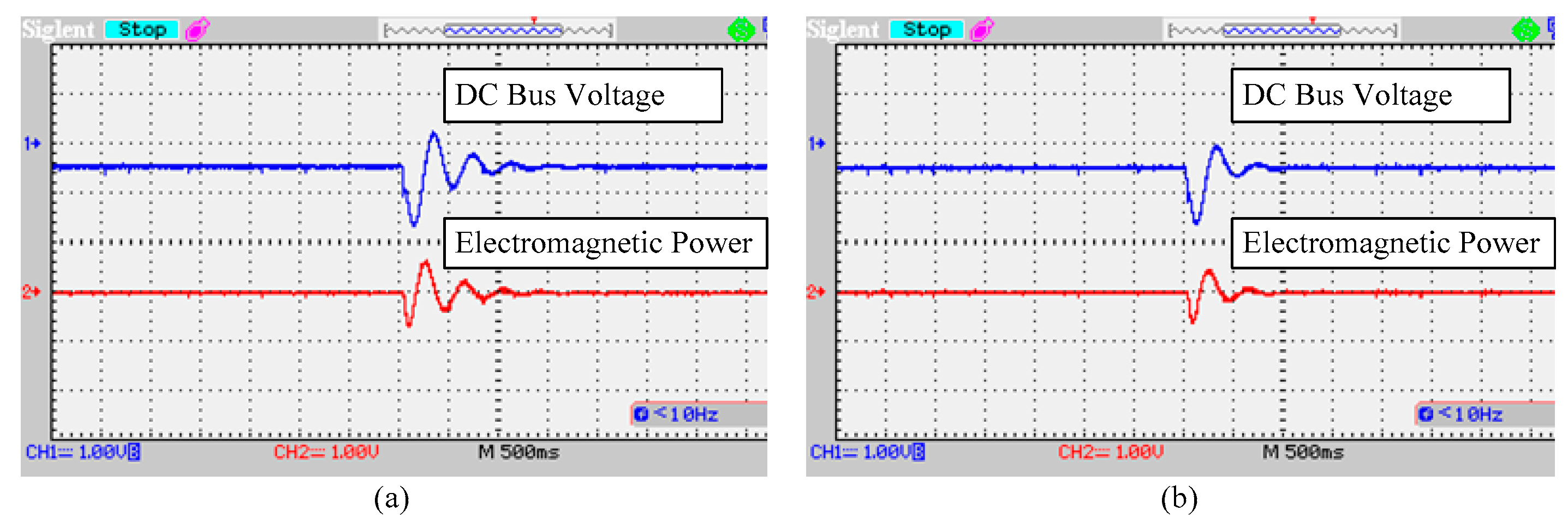
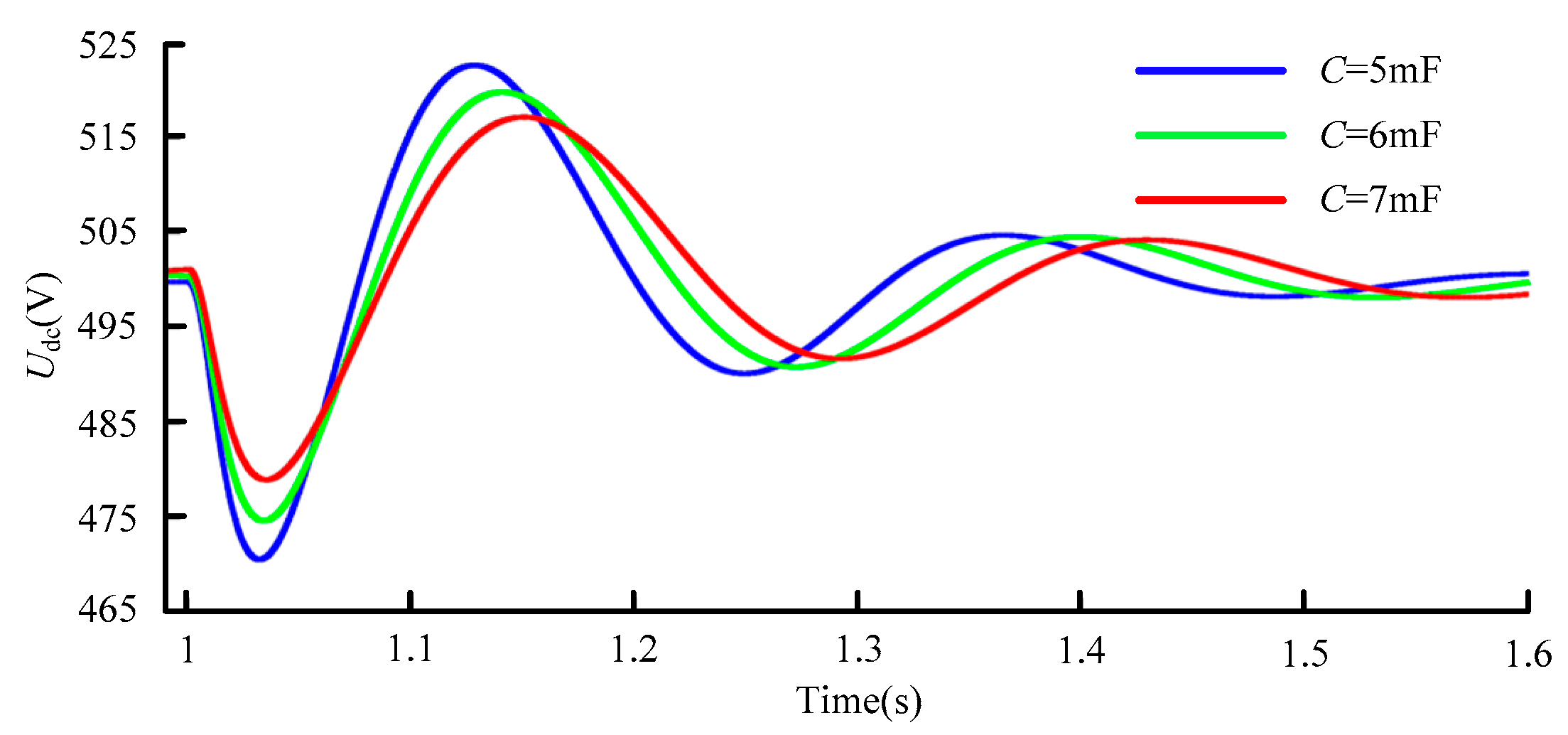
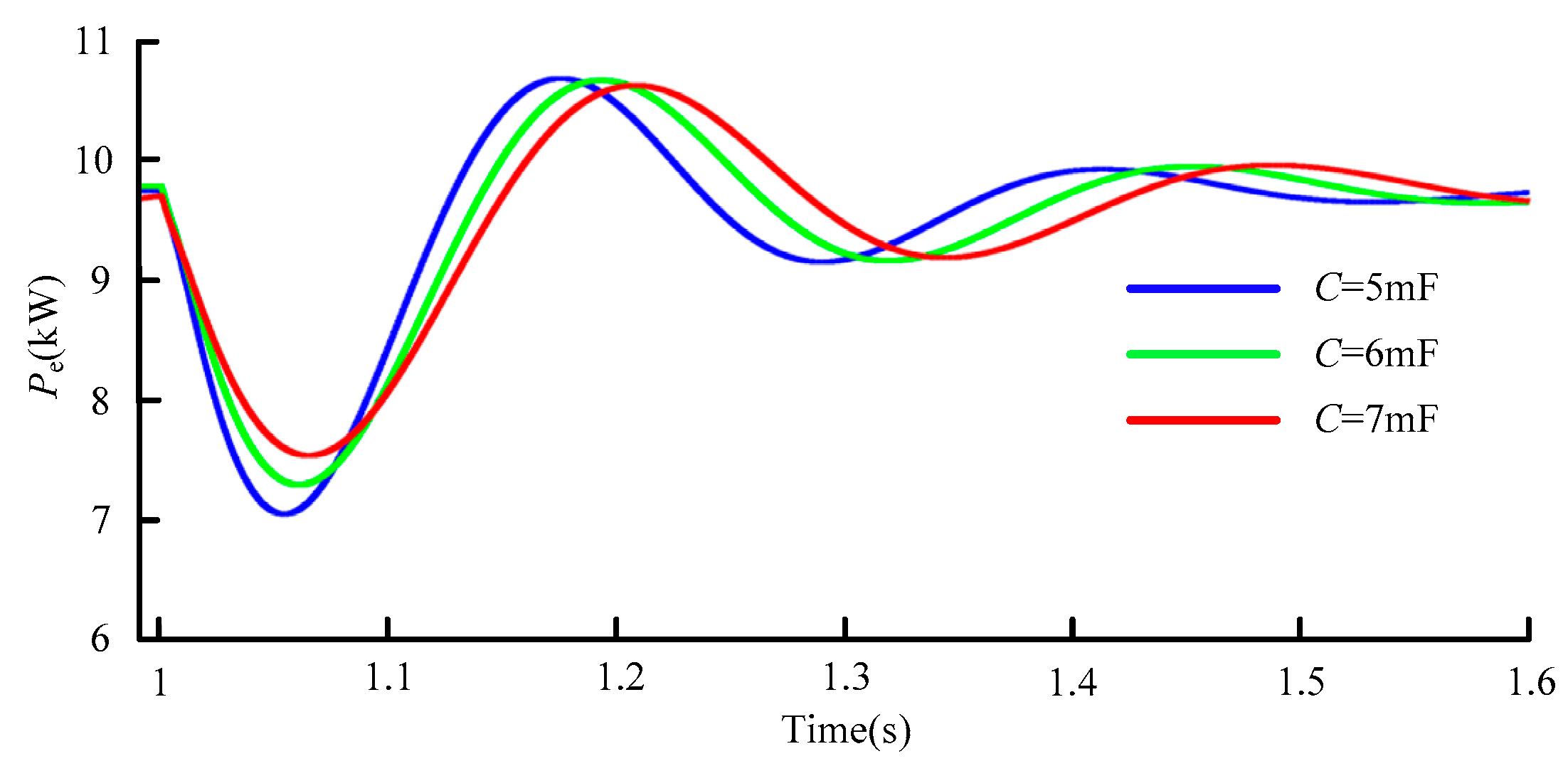
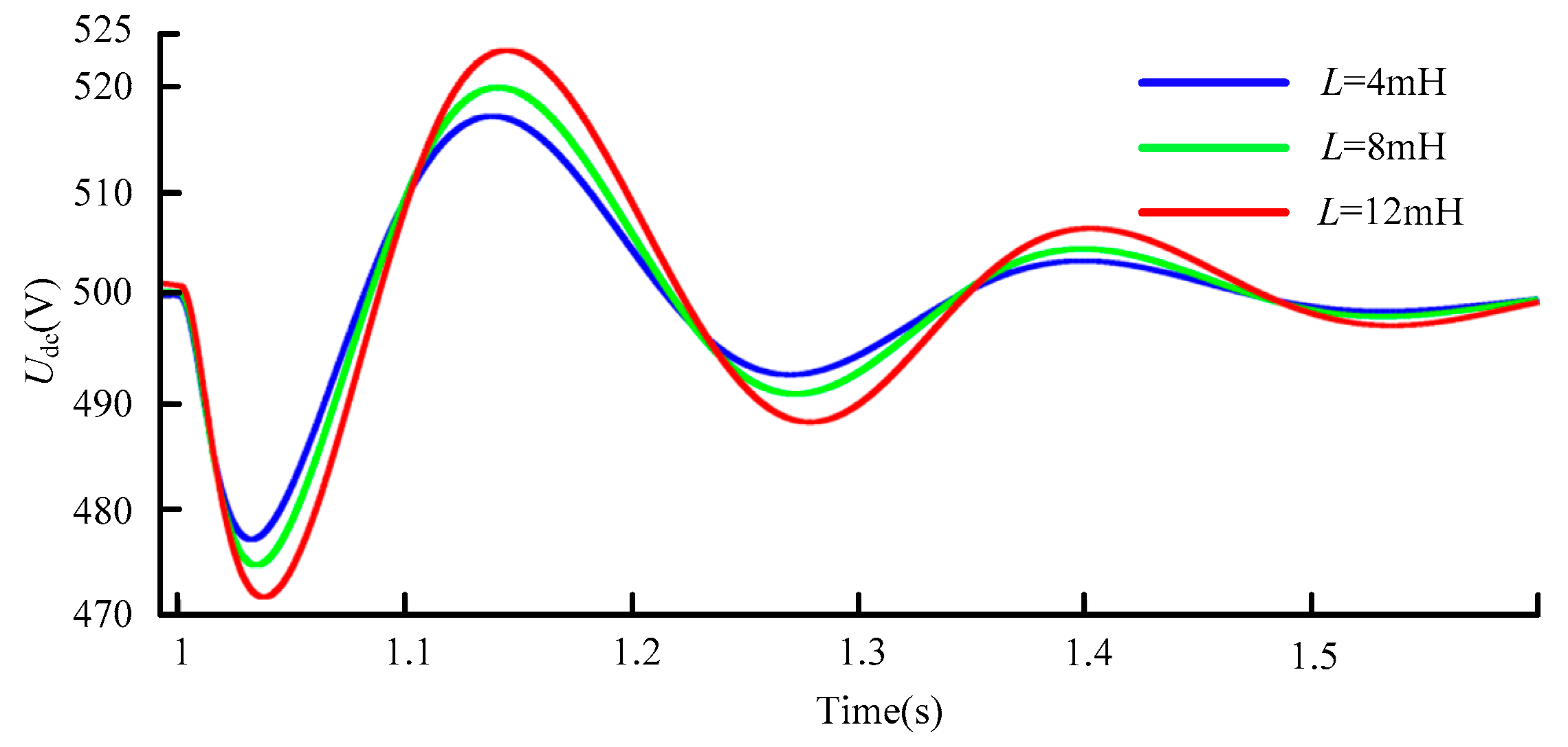
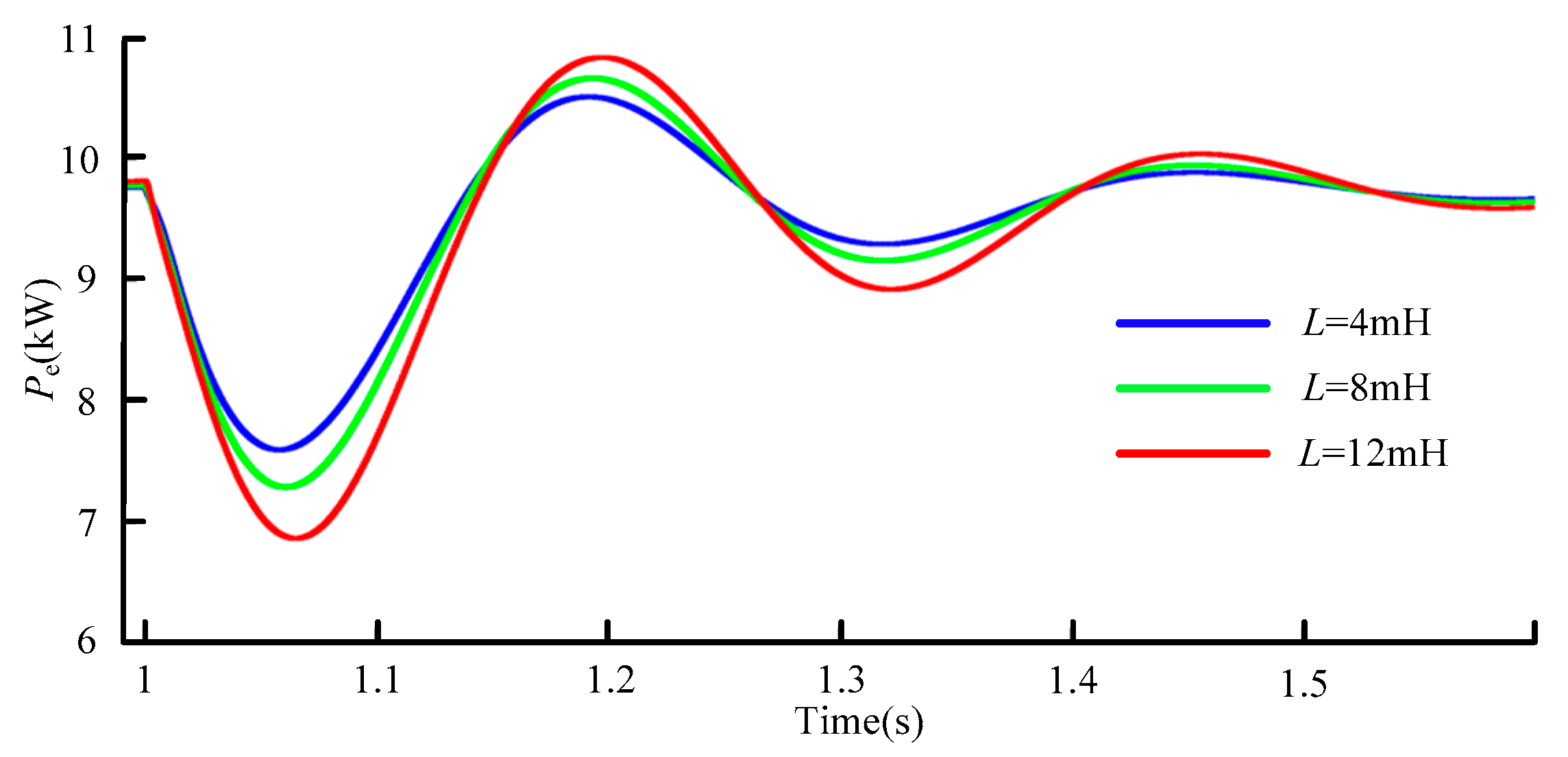
- From the perspective of structural parameters, the system dynamic characteristics are affected by structural parameters such as line impedance X and DC bus capacitance C. Reducing X can improve the inertia, damping and synchronization characteristics of the system. With the increase of C, the system inertia effect is stronger.
- (4)
- From the perspective of steady-state operating point parameters, the system dynamic characteristics are affected by the AC/DC bus voltage level. The higher the voltage level of the bus, the stronger the grid-connected stability of the system.
- (5)
- The GPVGS operating in MPPT mode do not have inertia and damping characteristics. The system can only provide inertia effects when coupled with the grid frequency.
Author Contributions
Funding
Conflicts of Interest
References
- Yang, X.; Song, Y.; Wang, G.; Wang, W. A comprehensive review on the development of sustainable energy strategy and implementation in China. IEEE Trans. Sustain. Energy 2010, 1, 57–65. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Morjaria, M.; Anichkov, D.; Chadliev, V.; Soni, S. A grid-friendly plant: The role of utility-scale photovoltaic plants in grid stability and reliability. IEEE Power Energy Mag. 2014, 12, 87–95. [Google Scholar] [CrossRef]
- Mei, S.; Zheng, T.; Chen, L.; Li, C.; Si, Y.; Guo, Y. A comprehensive consensus-based distributed control strategy for grid-connected PV-VSG. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 10029–10034. [Google Scholar]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Vega-Garita, V.; Sofyan, M.F.; Narayan, N.; Ramirez-Elizondo, L.; Bauer, P. Energy management system for the photovoltaic battery integrated module. Energies 2018, 11, 3371. [Google Scholar] [CrossRef]
- Xie, X.; Wang, X.; Hu, J.; Xu, L.; Bongiorno, M.; Miao, Z.; Molinas, M.; Pota, H.; Rodriguez, P. Guest Editorial: Oscillations in power systems with high penetration of renewable power generations. Iet Renew. Power Gen. 2019, 13, 1–3. [Google Scholar]
- Qiu, H.; Fang, J.; Tang, Y. Explore the capability of power electronic converters in providing power system virtual inertia. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018. [Google Scholar]
- Hu, J.; Yuan, H.; Yuan, X. Modeling of DFIG-Based WTs for Small-Signal Stability Analysis in DVC Timescale in Power Electronized Power Systems. IEEE Trans. Energy Convers. 2017, 32, 1151–1165. [Google Scholar] [CrossRef]
- Yuan, H.; Yuan, X.; Hu, J. Modeling of Grid-Connected VSCs for Power System Small-Signal Stability Analysis in DC-Link Voltage Control Timescale. IEEE Trans. Power Syst. 2017, 32, 3981–3991. [Google Scholar] [CrossRef]
- Fang, J.; Li, X.; Tang, Y. Grid-connected power converters with distributed virtual power system inertia. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Yan, X.; Li, J.; Wang, L.; Zhao, S.; Li, T.; Lv, Z.; Wu, M. Adaptive-MPPT-based control of improved photovoltaic virtual synchronous generators. Energies 2018, 11, 1834. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Del. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Chen, Y.; Zhu, M.; Yi, H. Static synchronous generator model: A new perspective to investigate dynamic characteristics and stability issues of grid-tied PWM inverter. IEEE Trans. Power Electron. 2016, 31, 6264–6280. [Google Scholar] [CrossRef]
- Ding, G.; Gao, F.; Tian, H.; Ma, C.; Chen, M.; He, G.; Liu, Y. Adaptive DC-link voltage control of two-stage photovoltaic inverter during low voltage ride-through operation. IEEE Trans. Power Electron. 2016, 31, 4182–4194. [Google Scholar] [CrossRef]
- Xiu, L.; Xiong, L.; Yang, P.; Kang, Z. Inertial and damping characteristics of DC distributed power systems based on frequency droop control. Energies 2018, 11, 2418. [Google Scholar] [CrossRef]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-Admittance Calculation and Shaping for Controlled Voltage-Source Converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Xiong, L.; Wang, D. Research on suppression mechanism of STATCOM on power oscillations. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017-ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 806–811. [Google Scholar]
- Xiong, L.; Li, Y.; Zhu, Y.; Yang, P.; Xu, Z. Coordinated control schemes of super-capacitor and kinetic energy of DFIG for rystem Frequency Support. Energies 2018, 11, 103. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop cntrol in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Xiong, L.; Xu, Z.; Xiu, L. Energy storage system control for electromechanical oscillation mitigation and its impact on inertia and damping of power system. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018; pp. 1–5. [Google Scholar]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the inertia of future more-electronics power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 1–19. [Google Scholar] [CrossRef]
- Guo, K.; Fang, J.; Tang, Y. Autonomous DC-Link Voltage Restoration for Grid-Connected Power Converters Providing Virtual Inertia. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018. [Google Scholar]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed power system virtual inertia implemented by grid-connected power converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef]
- Gan, D.; Xin, H.; Liu, Y.; Wang, Z.; Yang, T. A new frequency regulation strategy for photovoltaic systems without energy storage. IEEE Trans. Sustain. Energy 2013, 4, 985–993. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
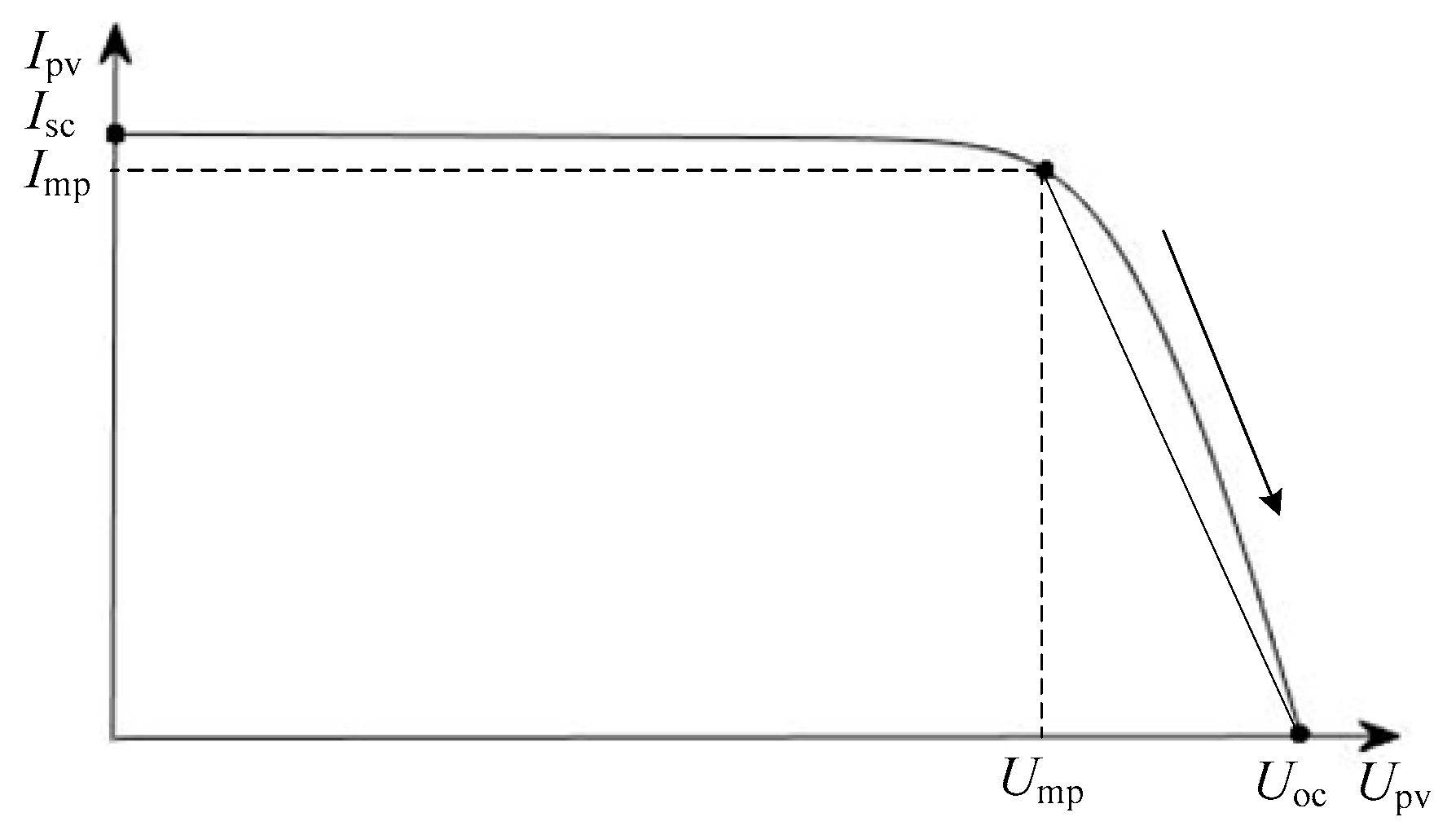
| Open circuit voltage, Uoc | 334 V | Maximum power point, Ump | 262 V |
| Short circuit current, Isc | 40.6 A | Maximum power point, Imp | 38.15 A |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| PV-link capacitor, C1 | 100 uF | The rated phase voltage of Grid, Ug | 220 V/50 Hz |
| Boost converter Inductor, Lb | 5 mH | The inductance of the L filter, Ls | 3 mH |
| DC-link capacitor, C | 6 mF | Grid side line reactance, Lg | 5 mH |
| Boost switching freq. | 20 kHz | Inverter switching freq. | 10 kHz |
| DC voltage, Udc | 500 V |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Zhang, D.; Xiong, L.; Wang, S.; Xu, Z.; Zhang, Y. Modeling and Mechanism Investigation of Inertia and Damping Issues for Grid-Tied PV Generation Systems with Droop Control. Energies 2019, 12, 1985. https://doi.org/10.3390/en12101985
Wu Y, Zhang D, Xiong L, Wang S, Xu Z, Zhang Y. Modeling and Mechanism Investigation of Inertia and Damping Issues for Grid-Tied PV Generation Systems with Droop Control. Energies. 2019; 12(10):1985. https://doi.org/10.3390/en12101985
Chicago/Turabian StyleWu, Yongbin, Donghui Zhang, Liansong Xiong, Sue Wang, Zhao Xu, and Yi Zhang. 2019. "Modeling and Mechanism Investigation of Inertia and Damping Issues for Grid-Tied PV Generation Systems with Droop Control" Energies 12, no. 10: 1985. https://doi.org/10.3390/en12101985
APA StyleWu, Y., Zhang, D., Xiong, L., Wang, S., Xu, Z., & Zhang, Y. (2019). Modeling and Mechanism Investigation of Inertia and Damping Issues for Grid-Tied PV Generation Systems with Droop Control. Energies, 12(10), 1985. https://doi.org/10.3390/en12101985