Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table



Abstract
:1. Introduction
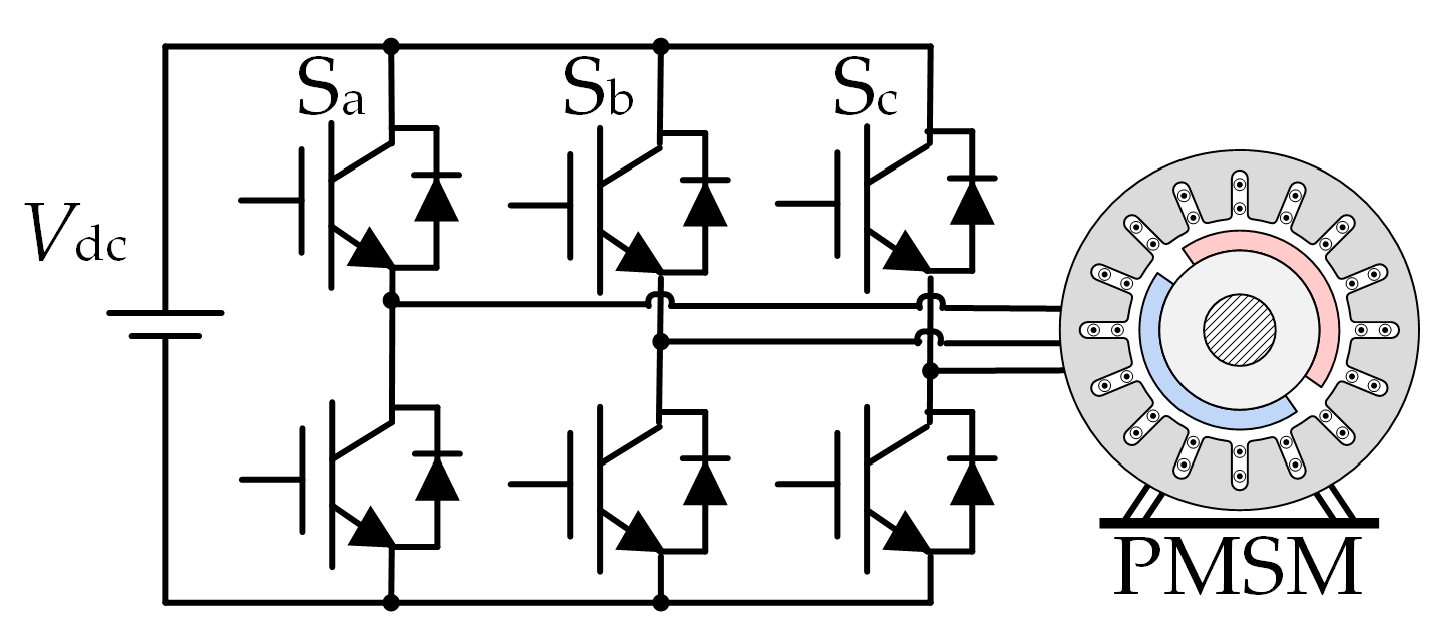
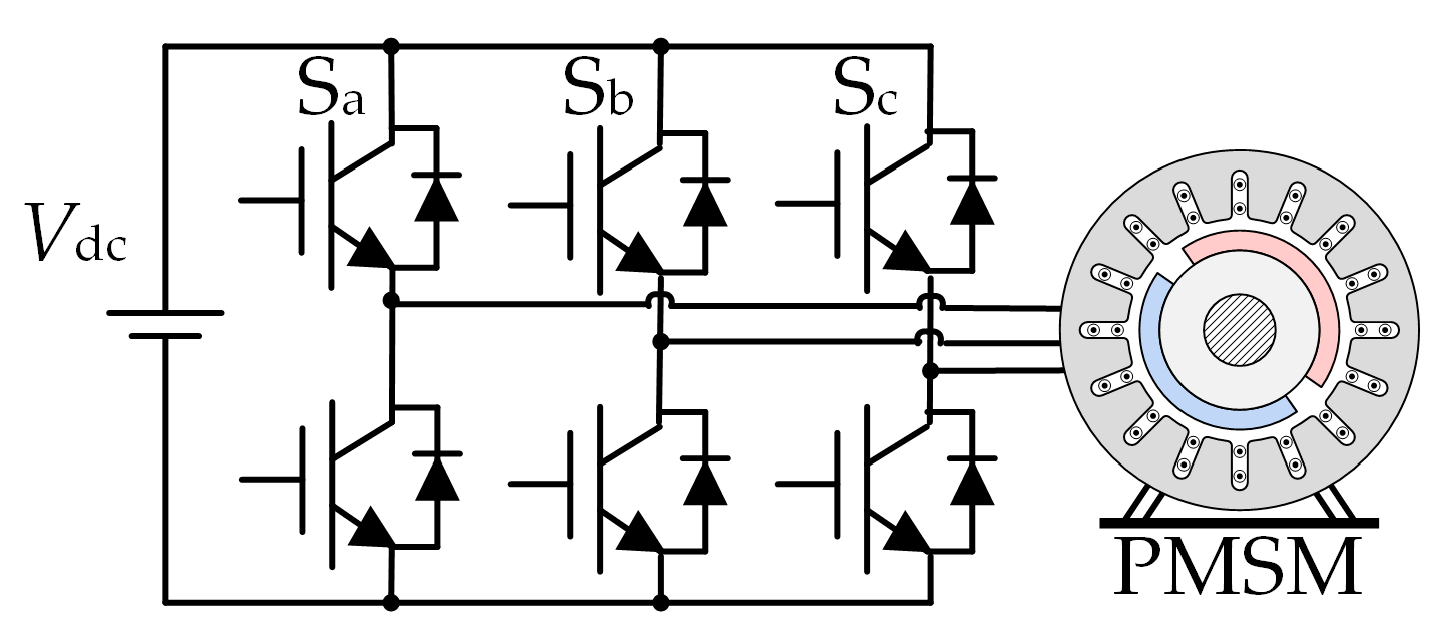
2. Dual-Vector Predictive Model of PMSM
3. Dual-Vector Predictive Torque Control Based on Candidate Vector Table
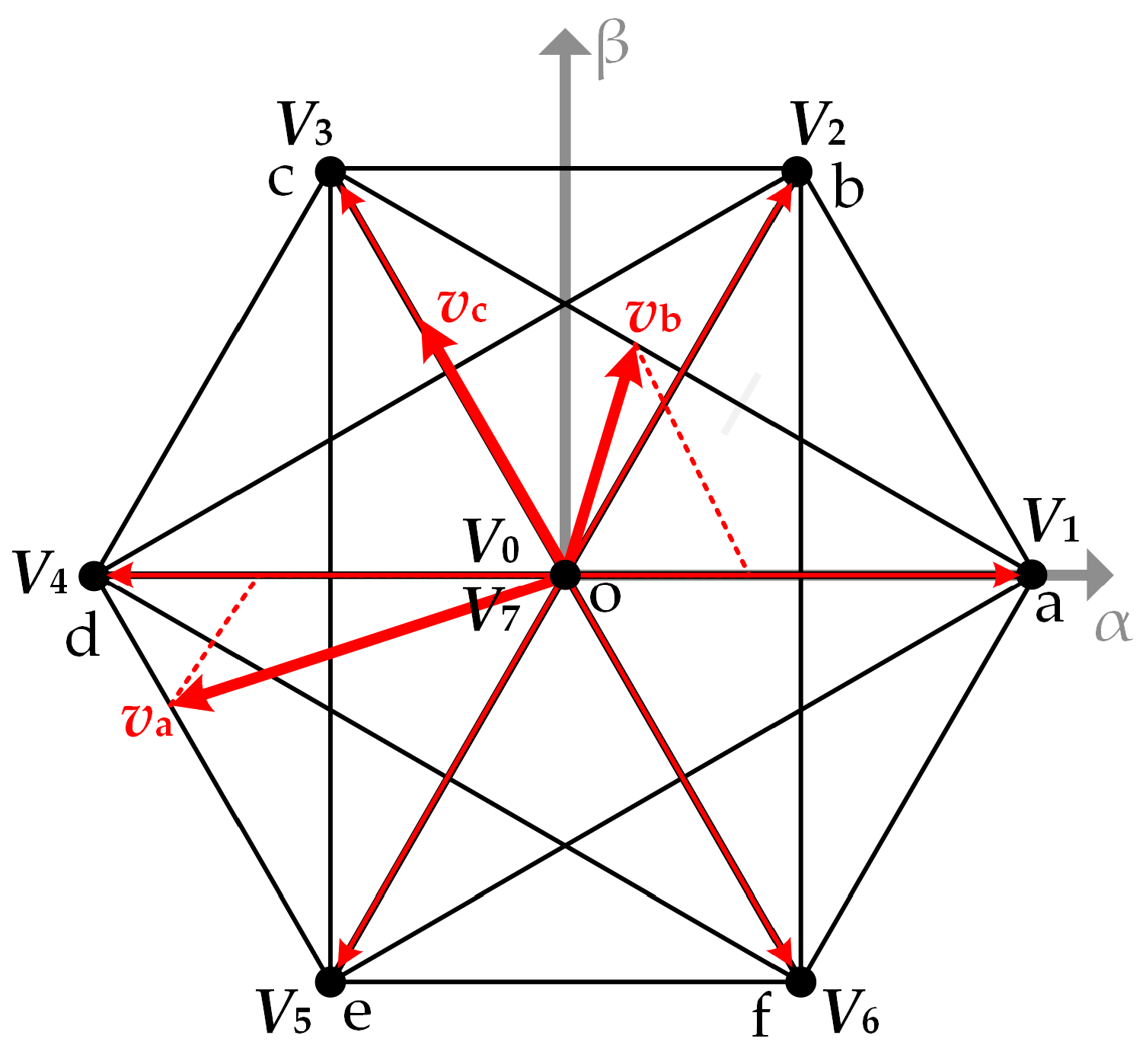
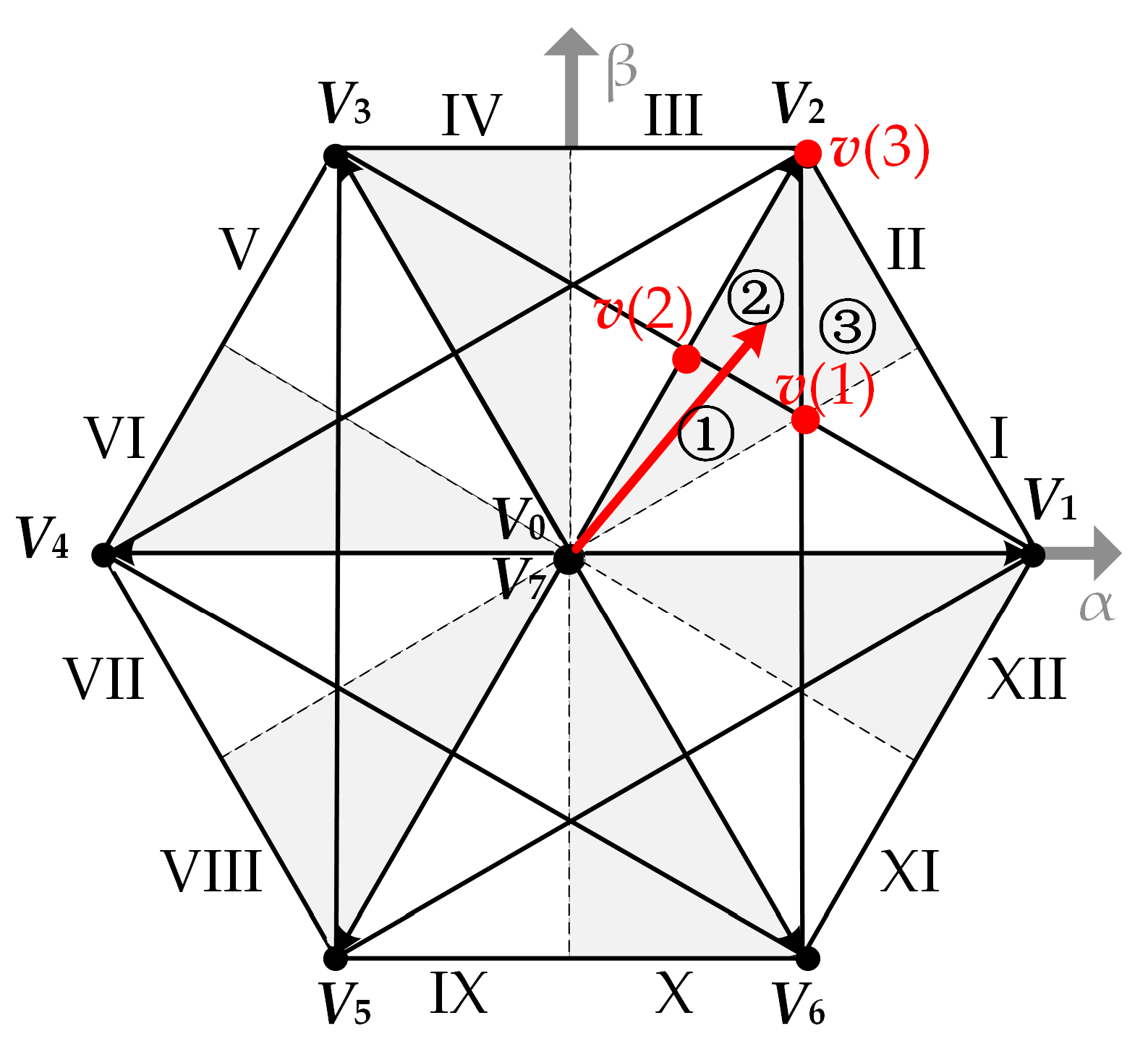
3.1. Synthesized Vector Set
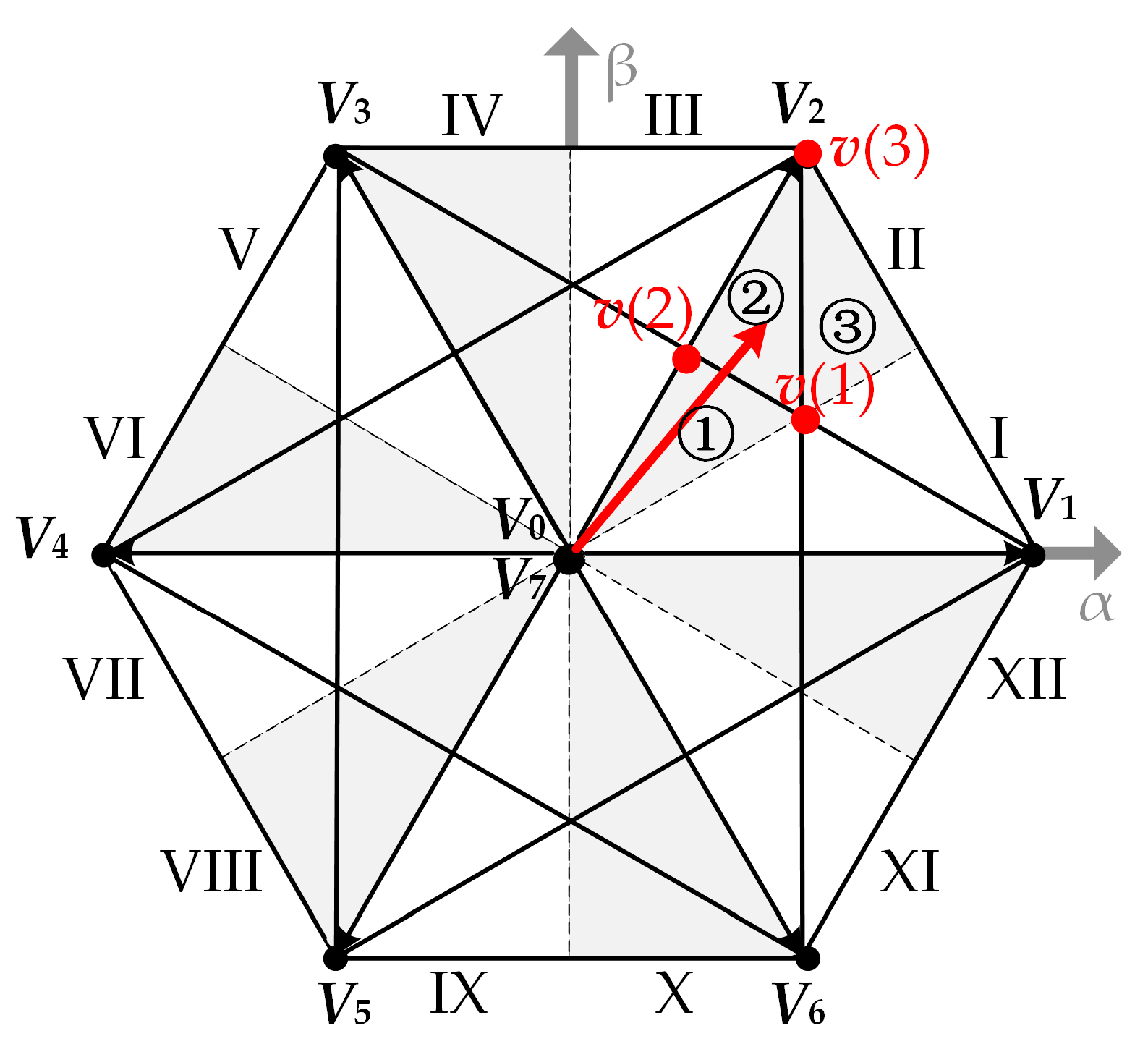
3.2. Desired Voltage Vector
3.3. Construct Candidate Vector Table Offline
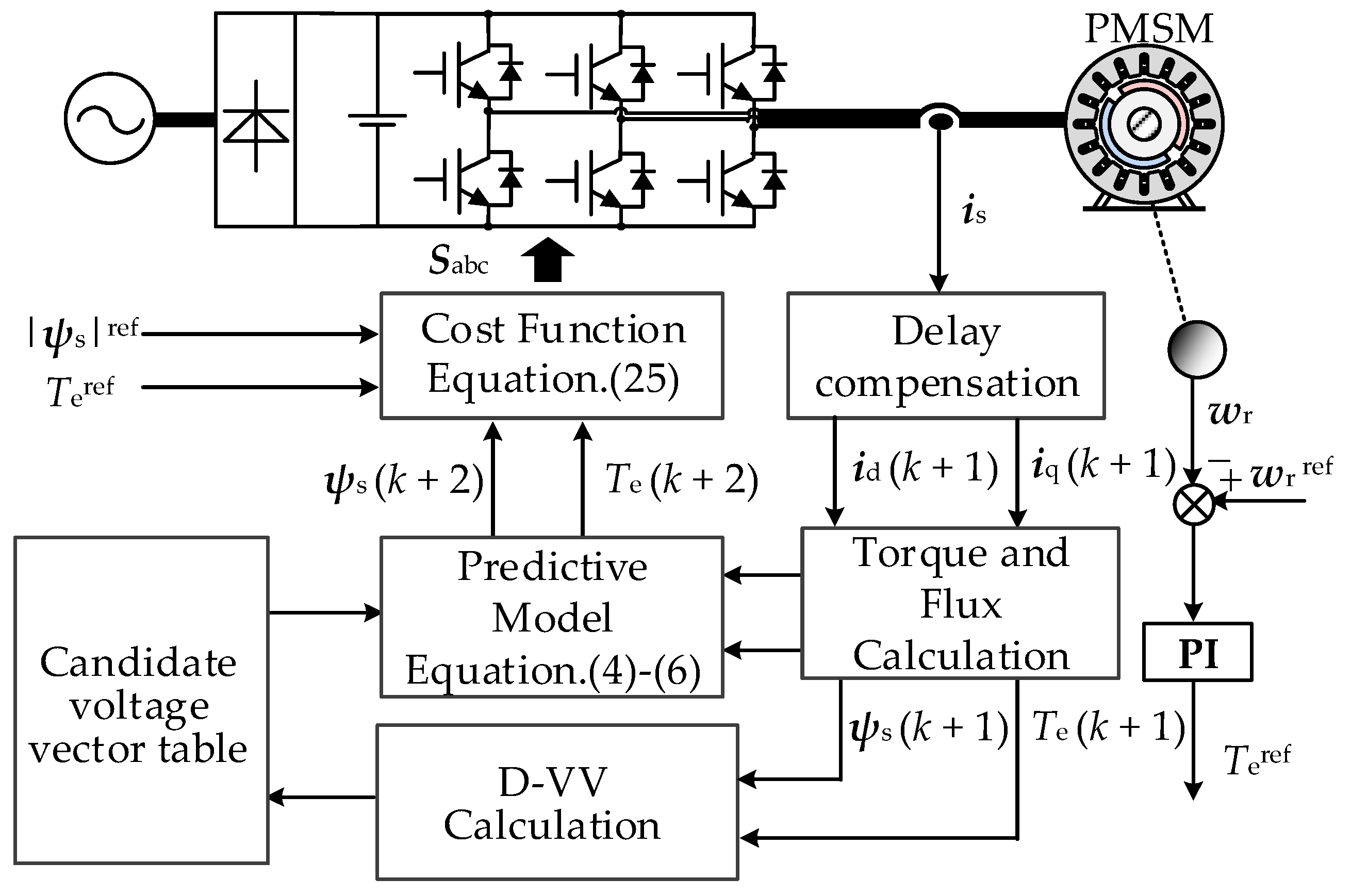
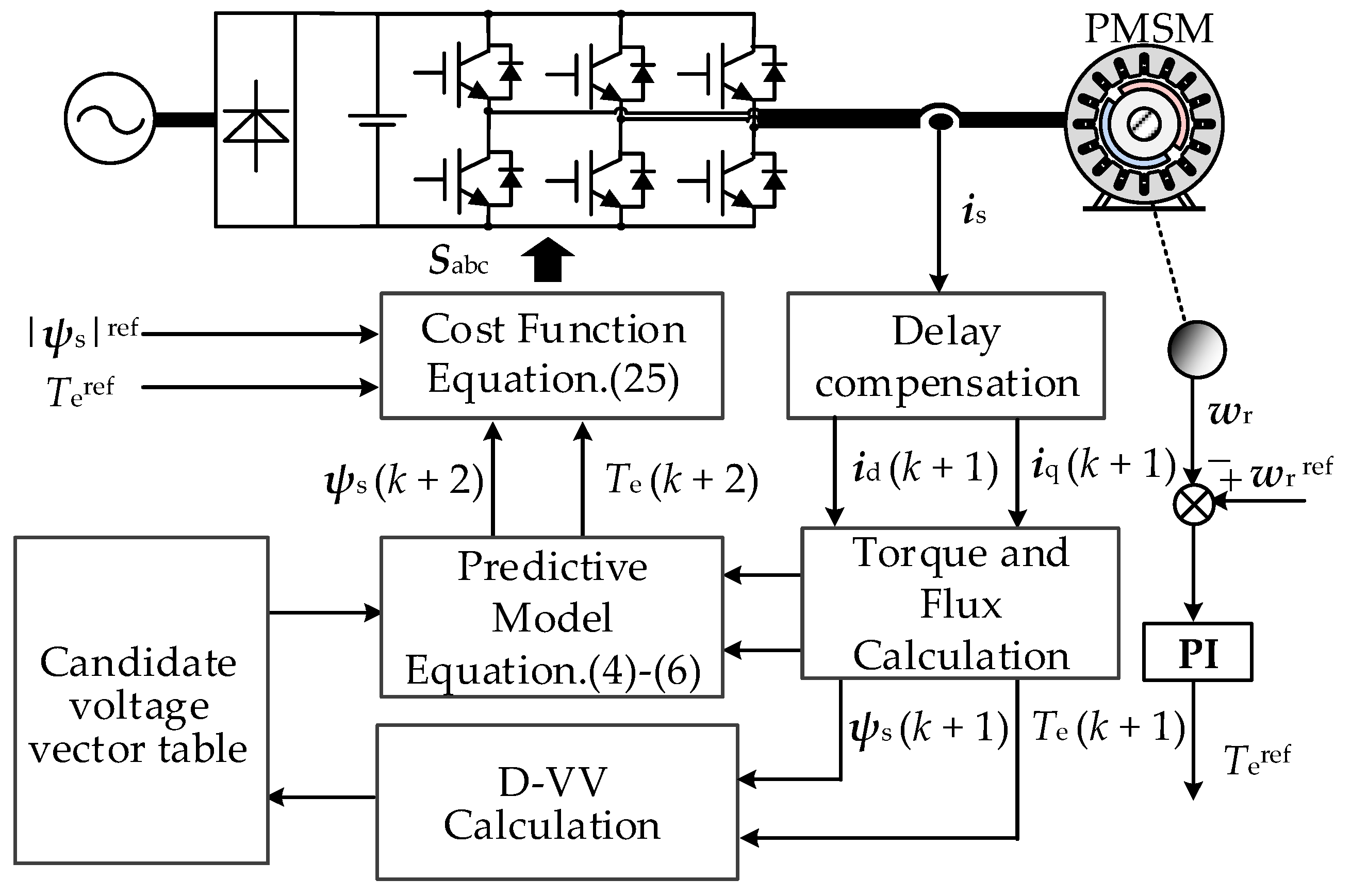
3.4. Realization of Control Algorithm
- (1)
- The stator three-phase current, DC bus voltage and motor rotor position at the current time are obtained by sampling.
- (2)
- The isd (k + 1) and isq (k + 1) are calculated by using the sampled current values isd (k) and isq (k) according to Equation (4).
- (3)
- The ψs (k + 1) and Te (k + 1) are calculated by using the compensated current value isd (k + 1) and isq (k + 1). Output the variable at (k + 1) Ts to the predictive model part as the predicted starting value;
- (4)
- The ψs (k + 1) and Te (k + 1) are also taken as the input of the D-VV calculation part. The D-VV is obtained by the deadbeat principle of torque and flux, and then the region is judged according to its position angle and amplitude information.
- (5)
- Three sets of candidate voltage vectors and their duty cycles can be obtained by looking up the table. Finally, the candidate voltage vectors and their duty cycles are substituted into the predictive model of PMSM, and the voltage vector acted on the inverter is screened by cost function.
4. Experimental Results
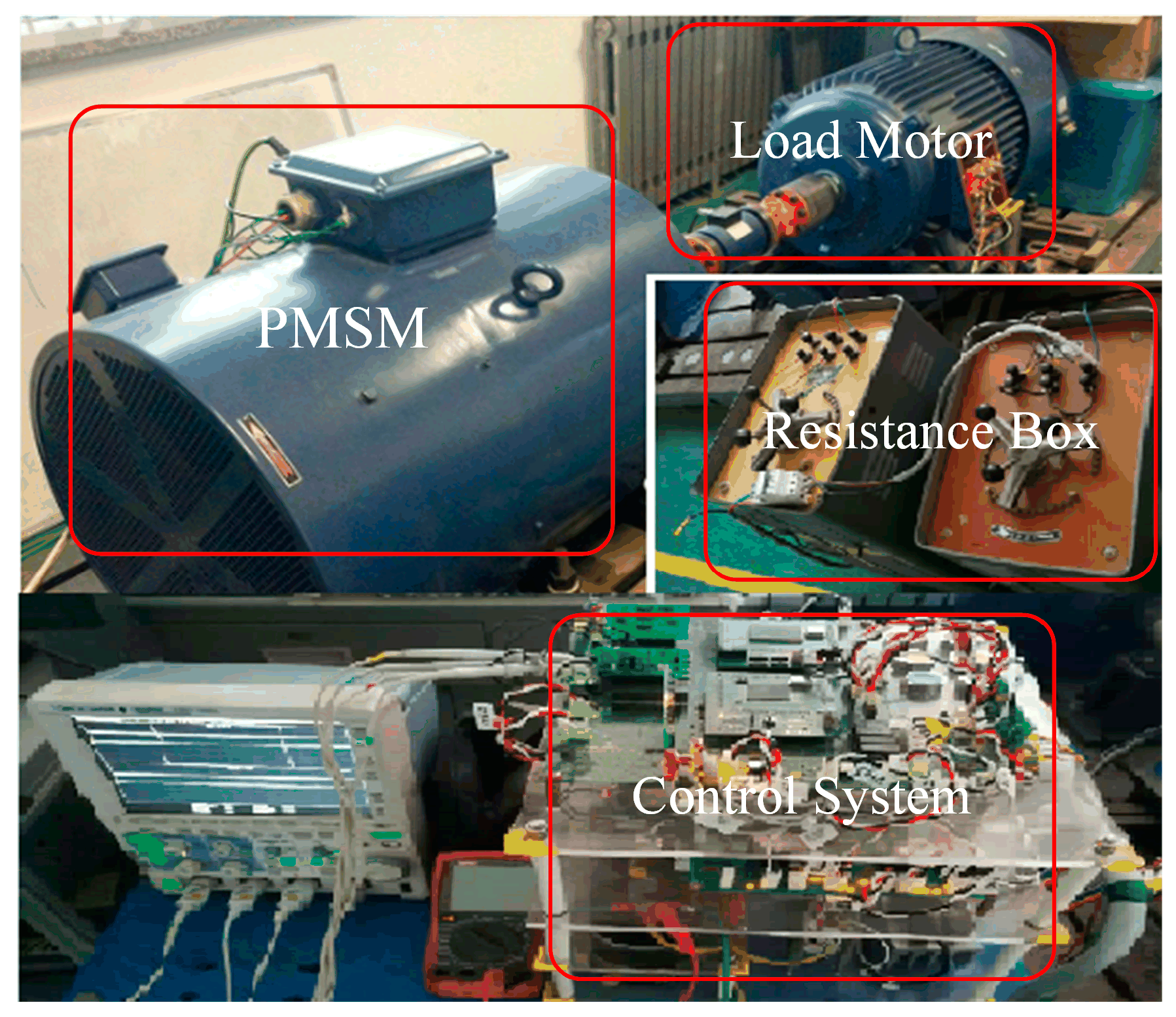
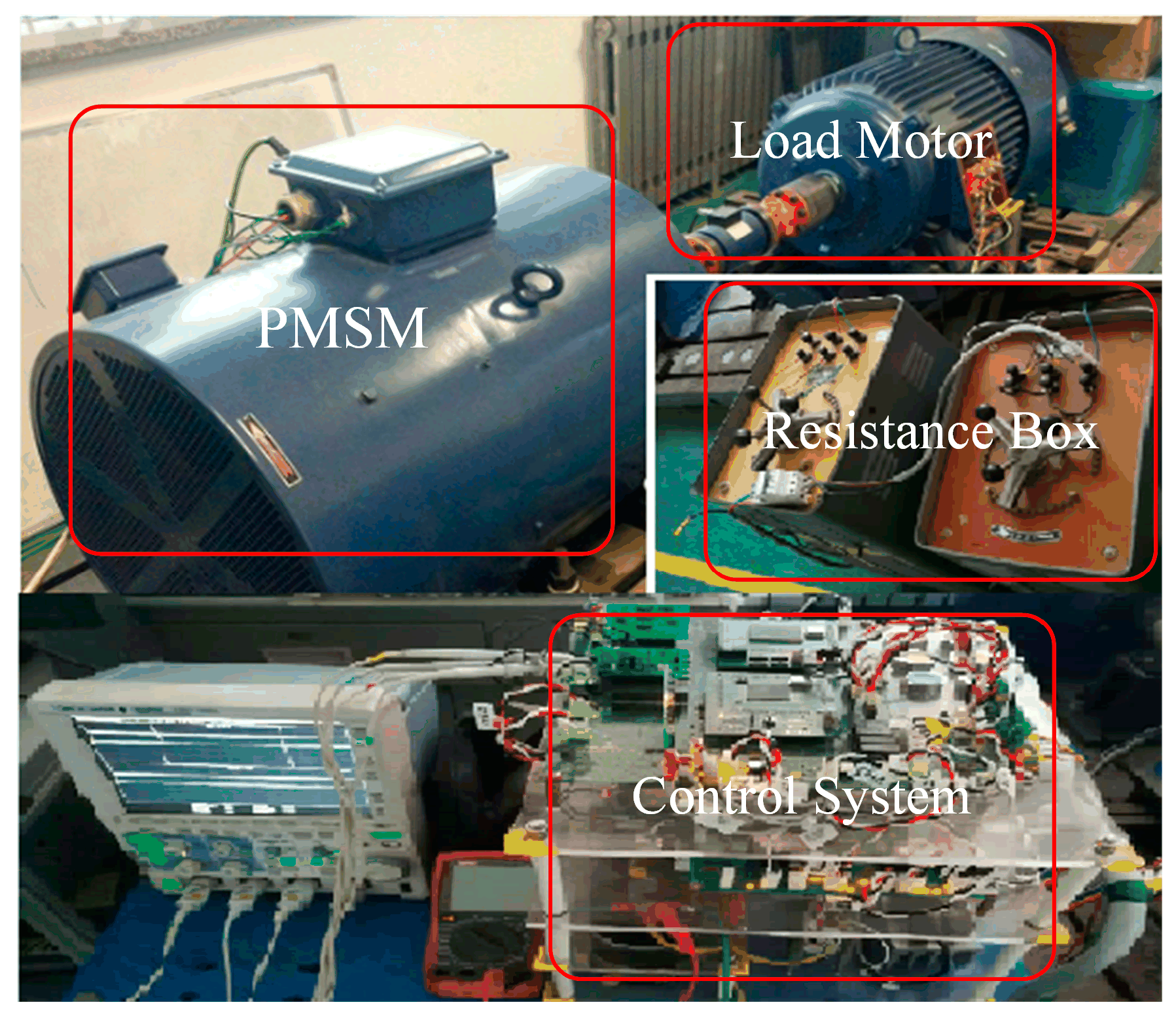
4.1. Experimental Platform
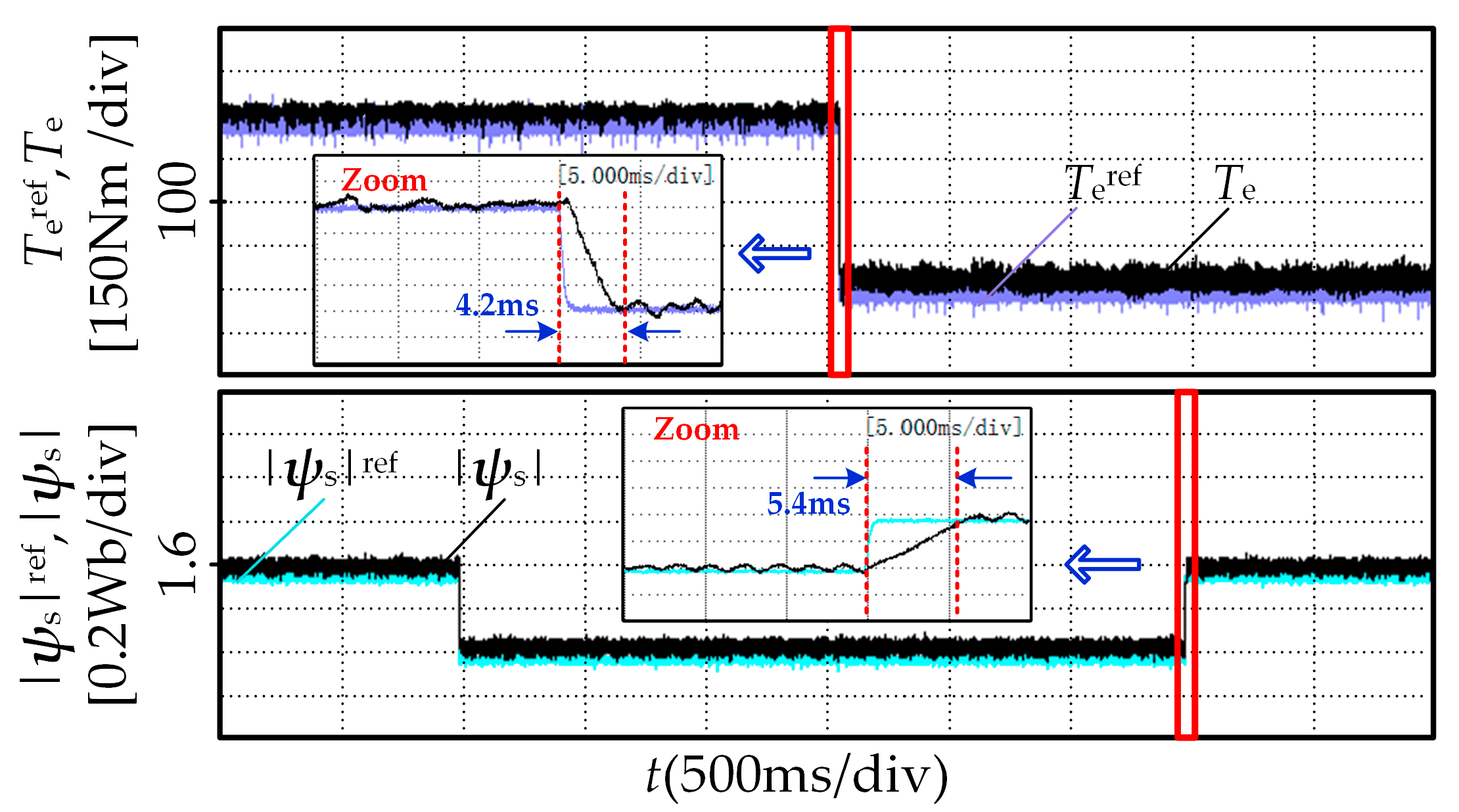
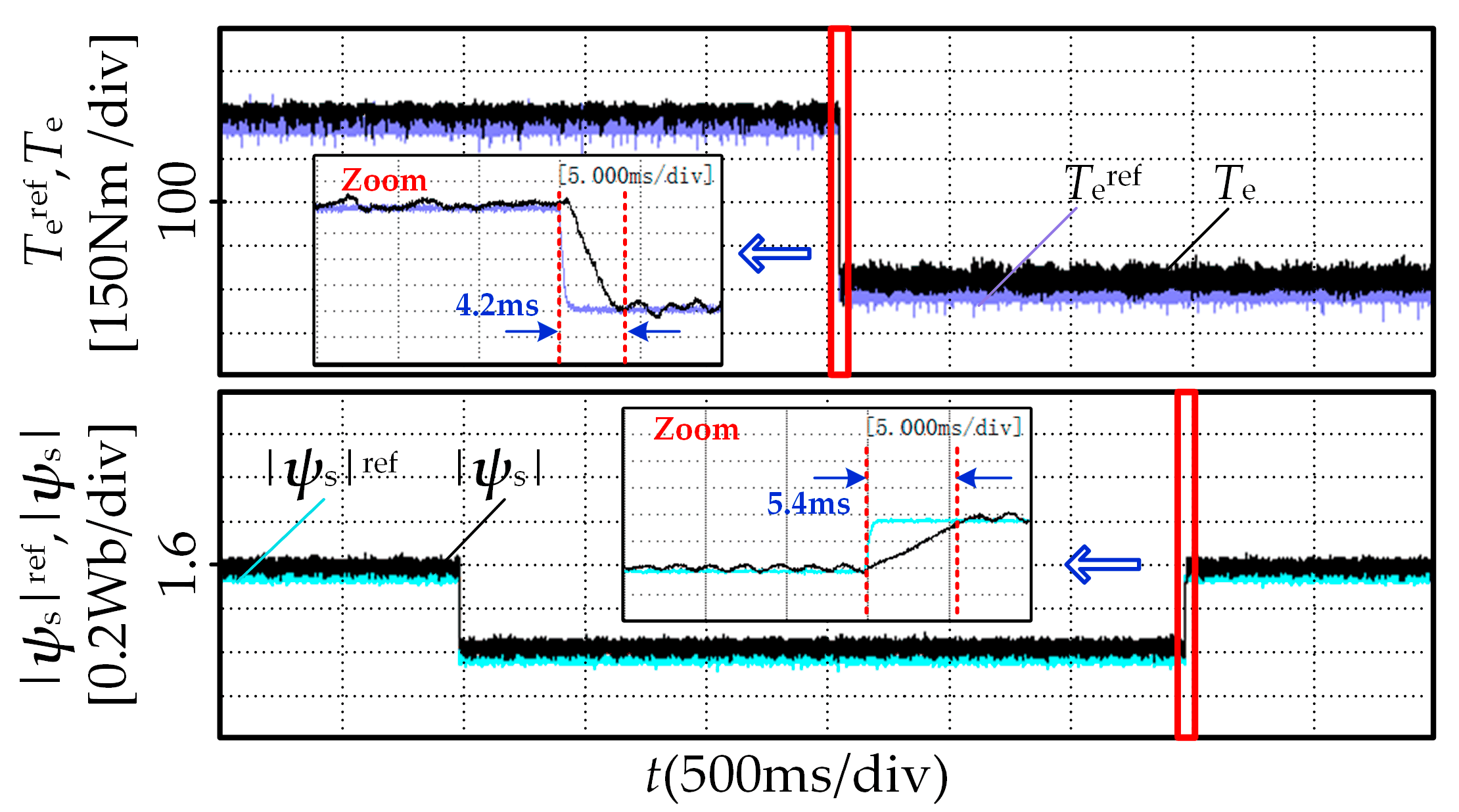
4.2. Torque and Flux Amplitude Tracking Experiment
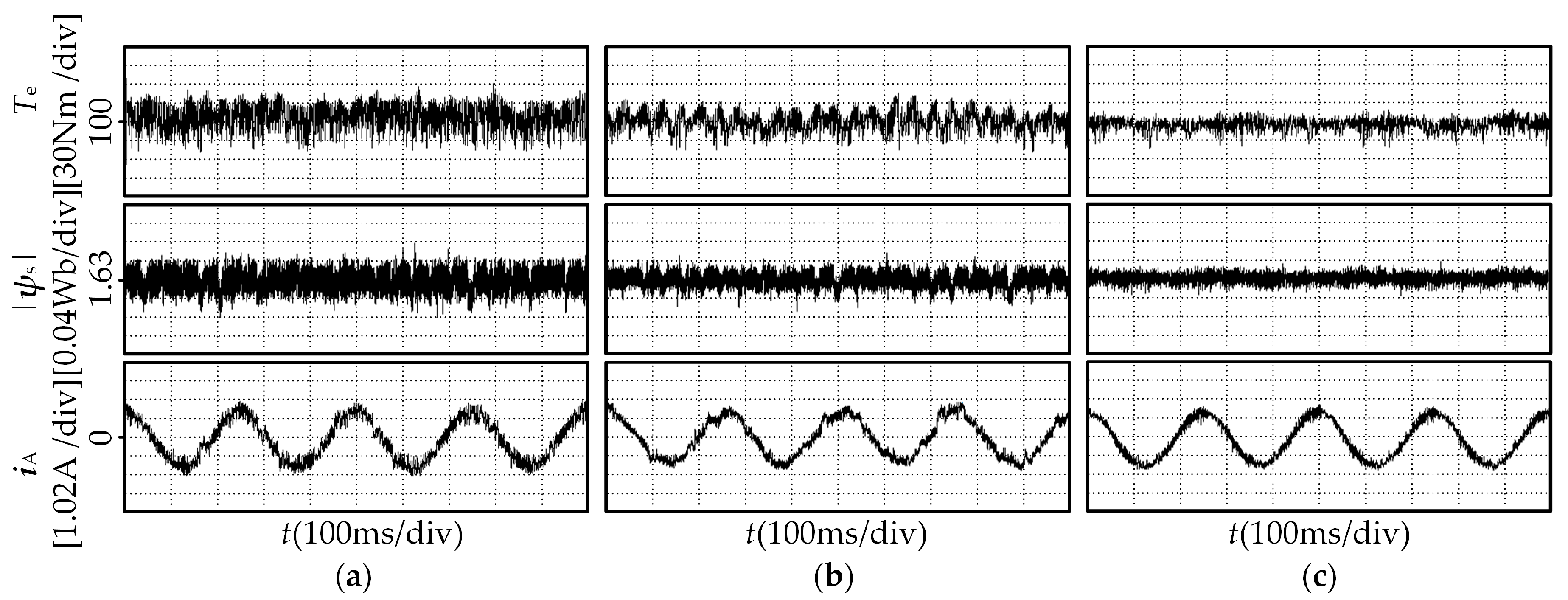
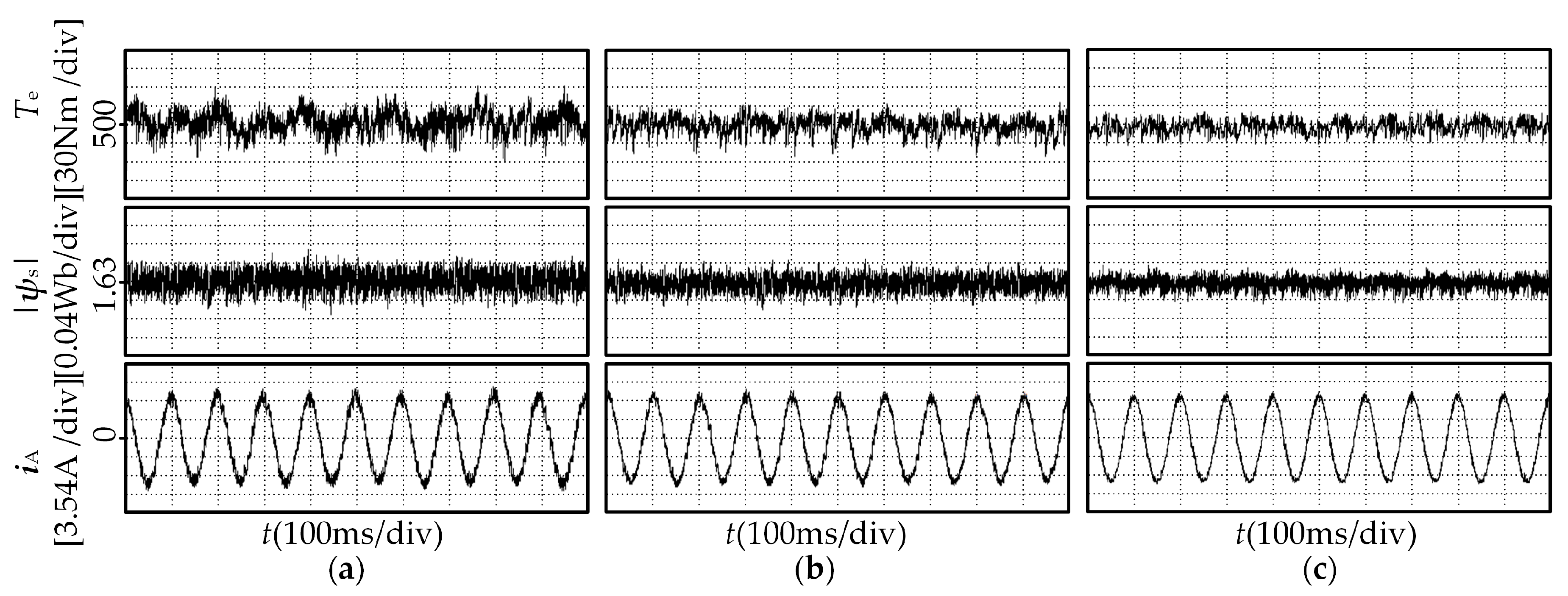
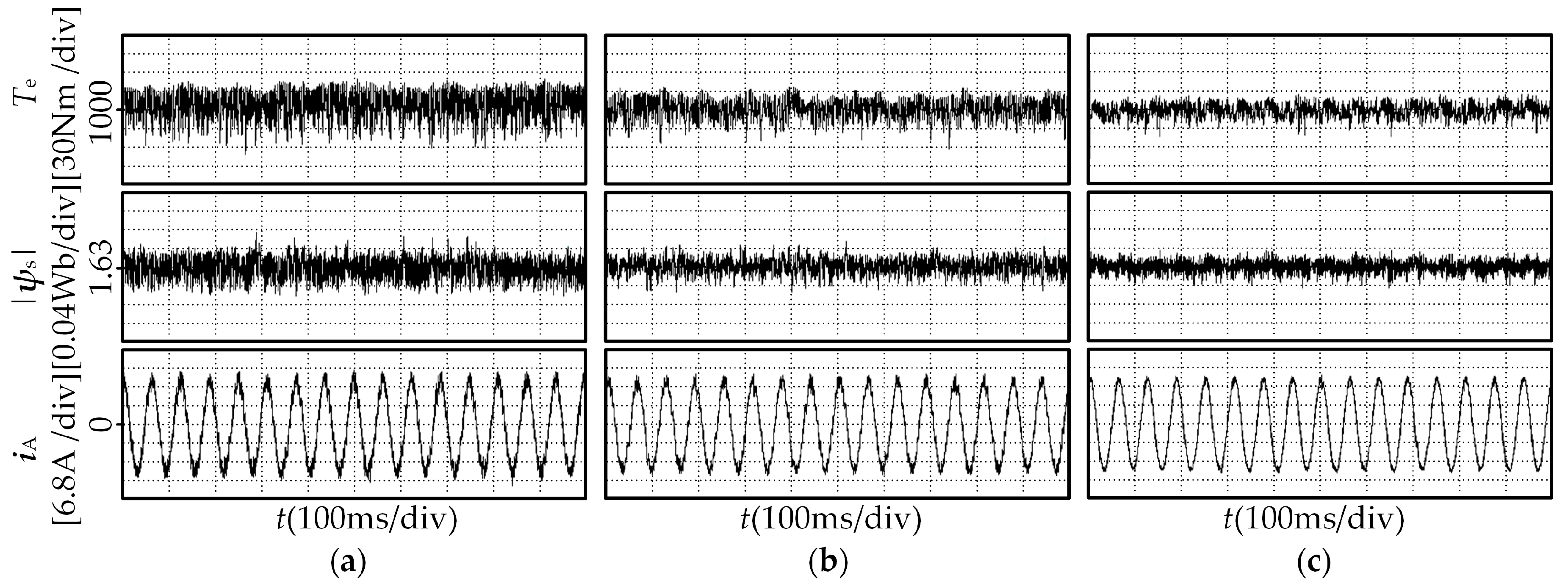
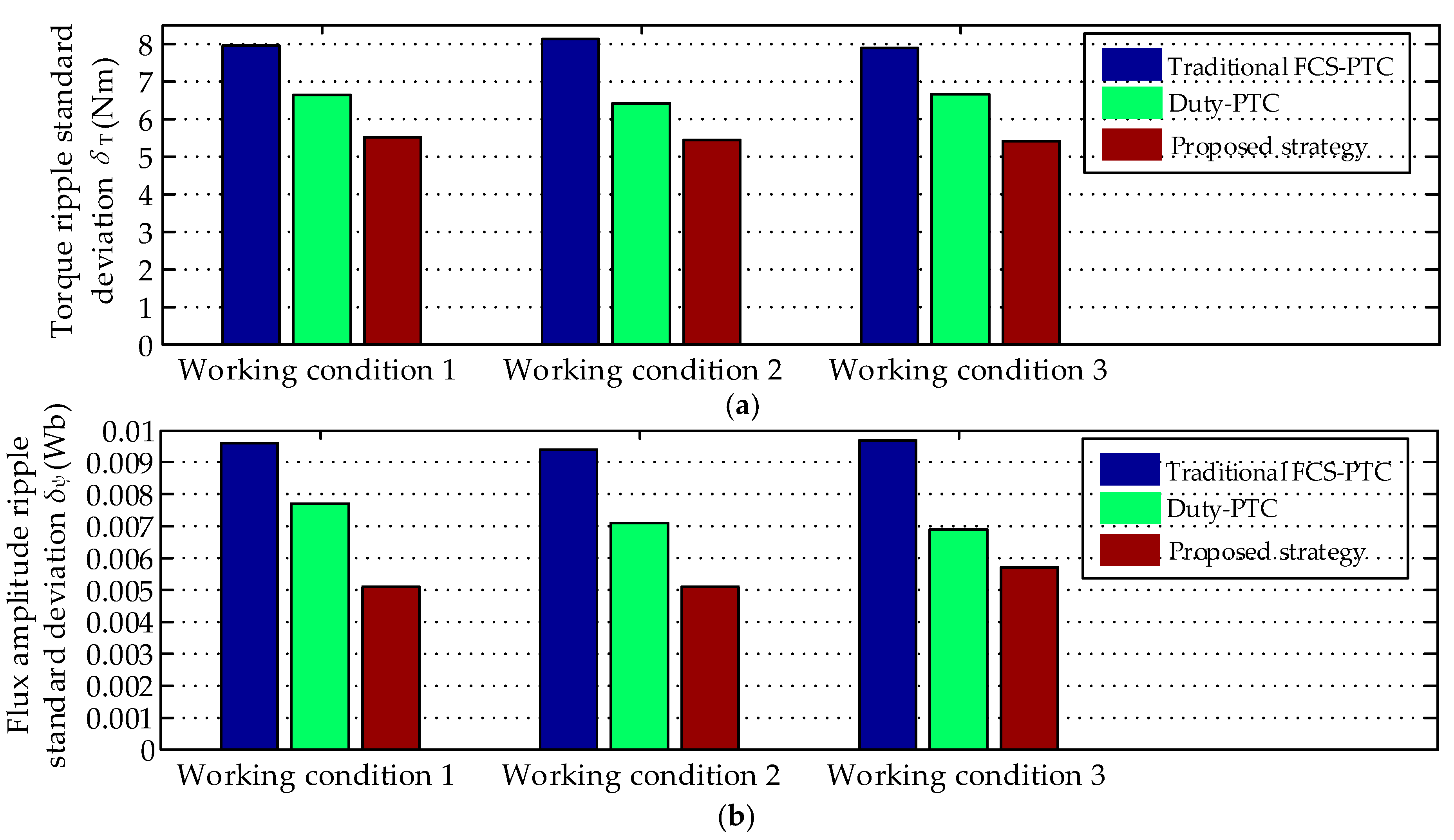
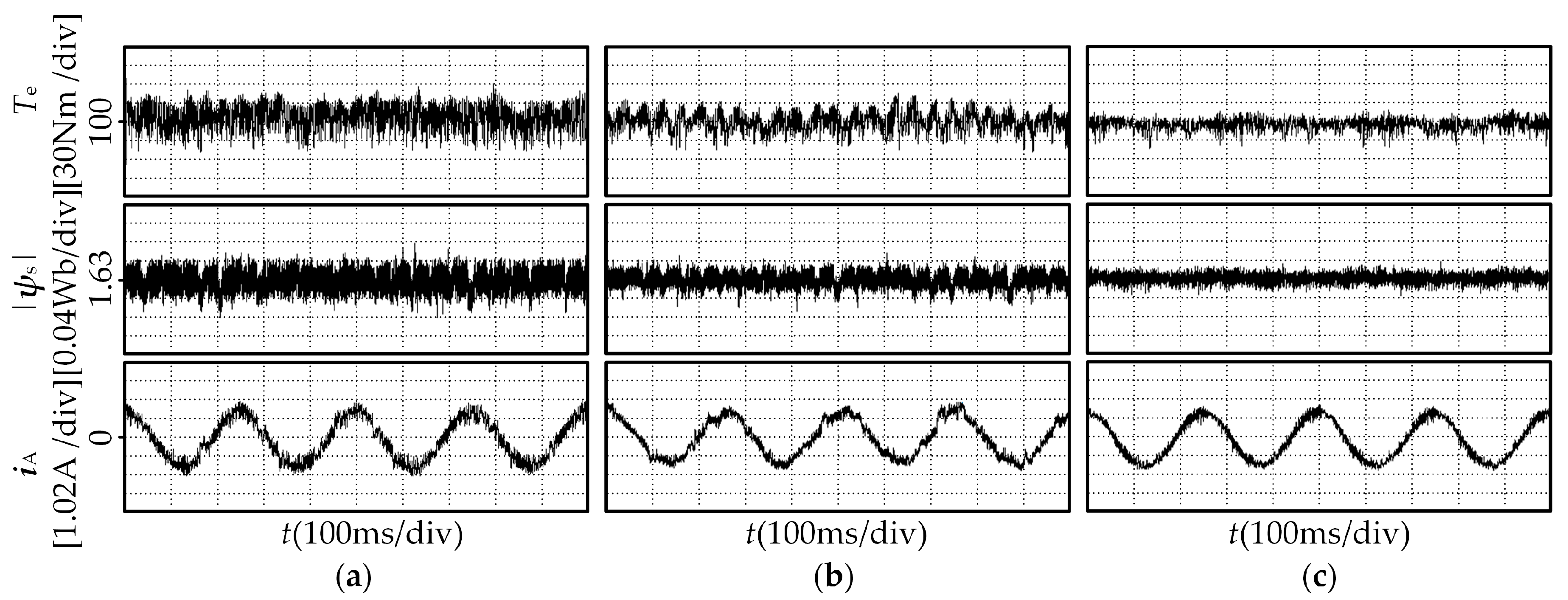
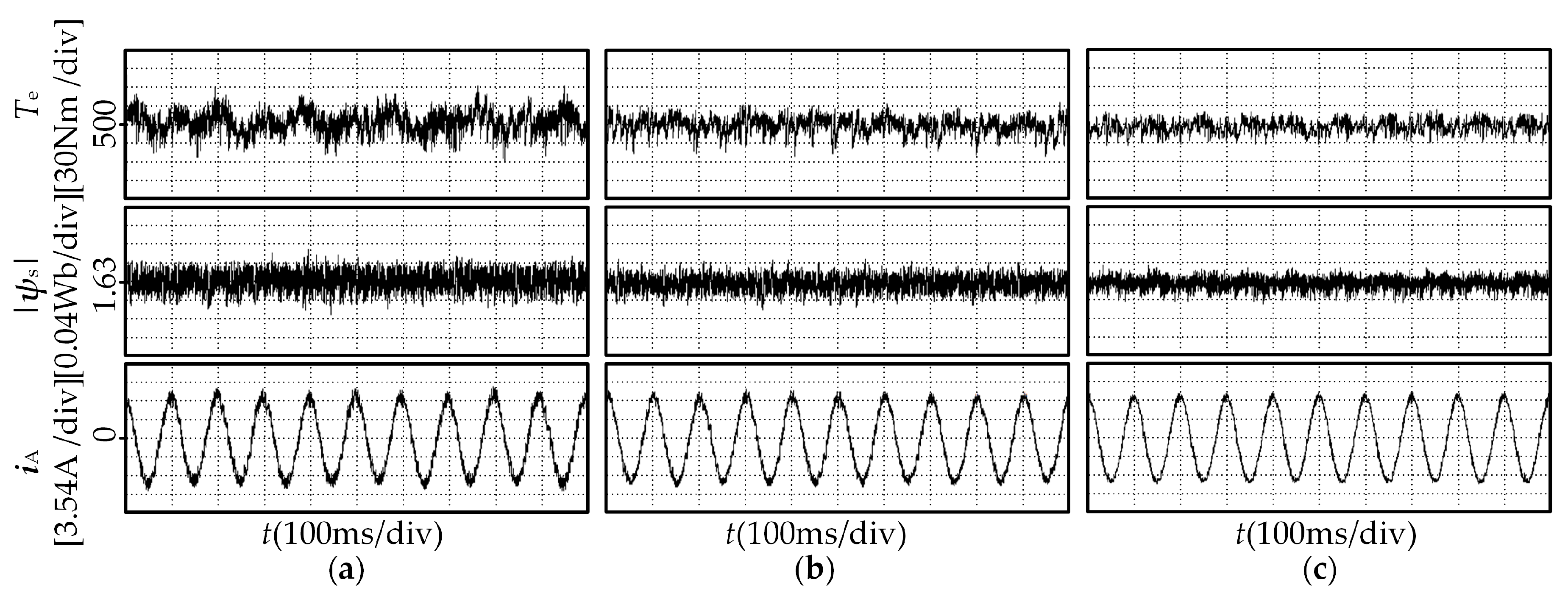
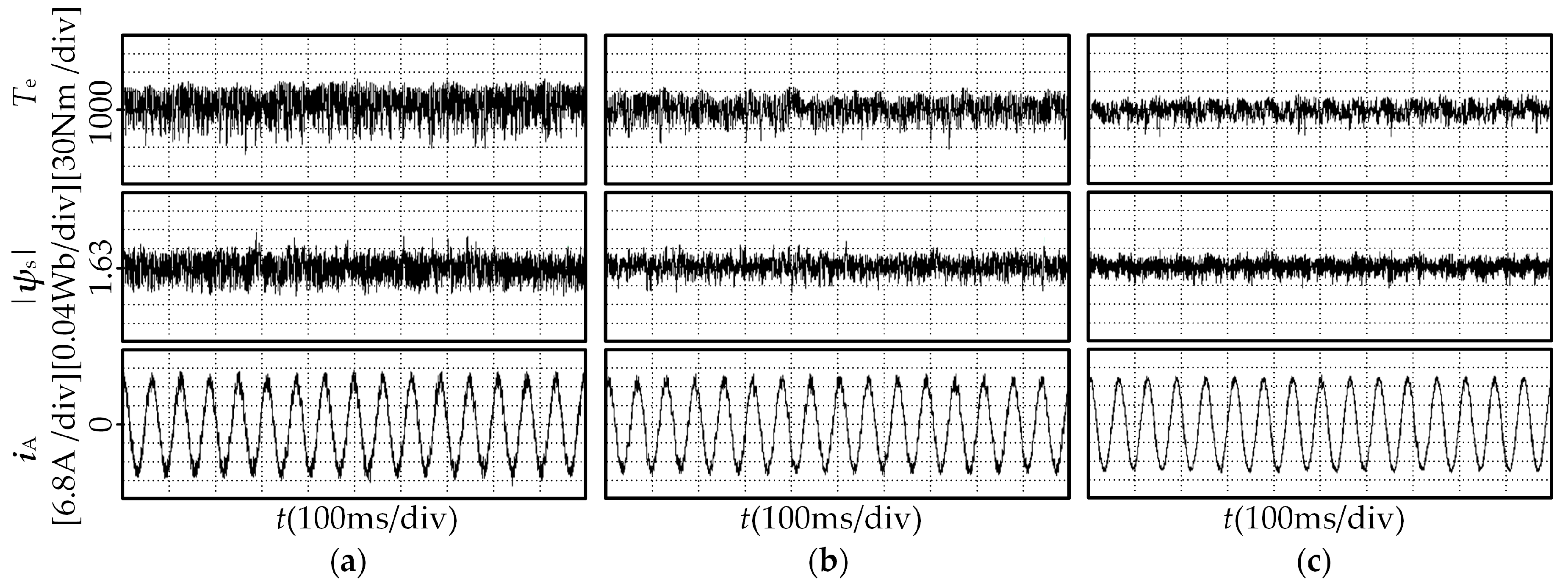
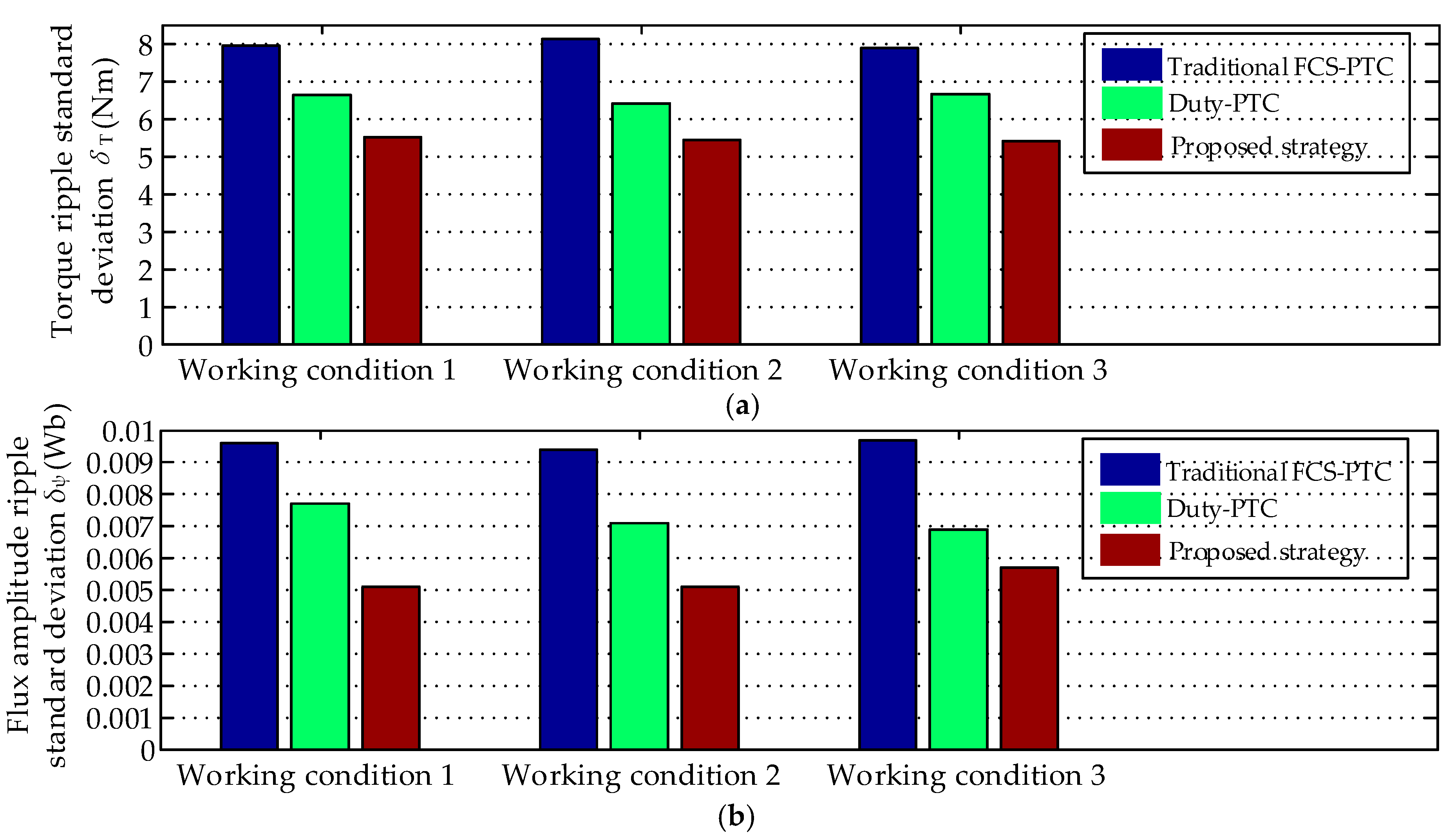
4.3. Steady Performance Comparison
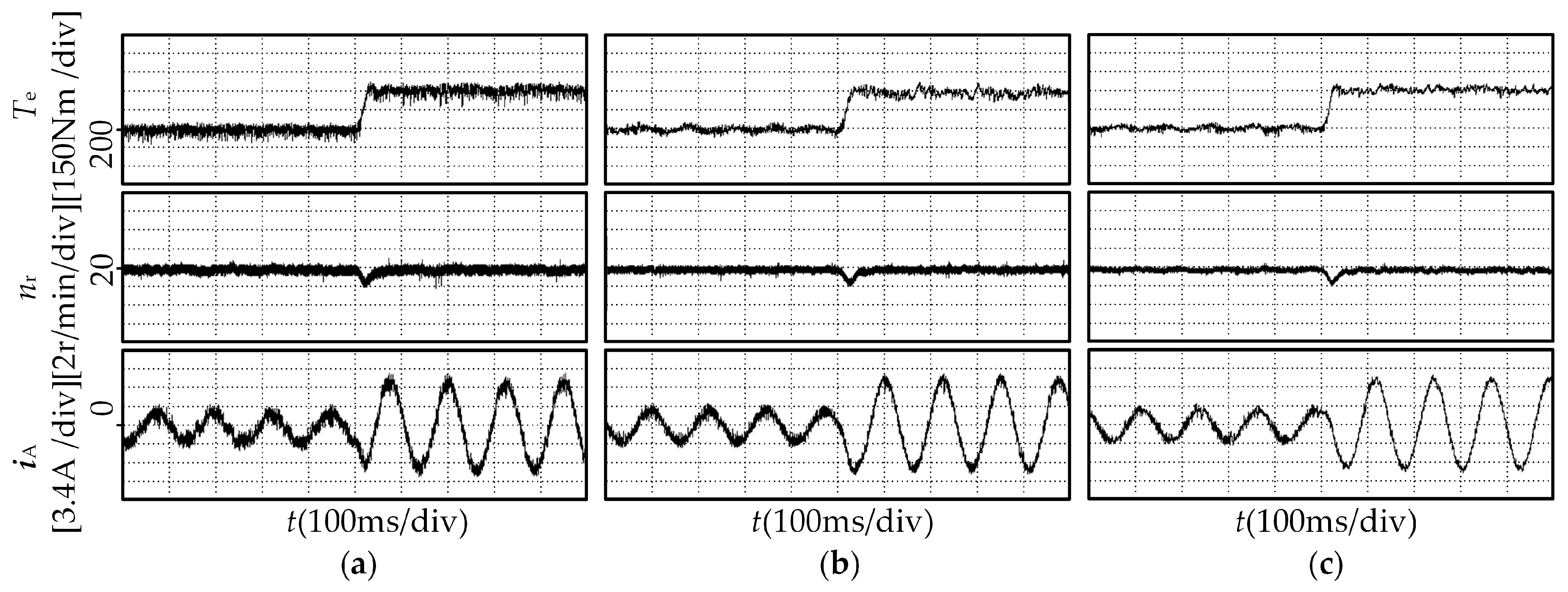
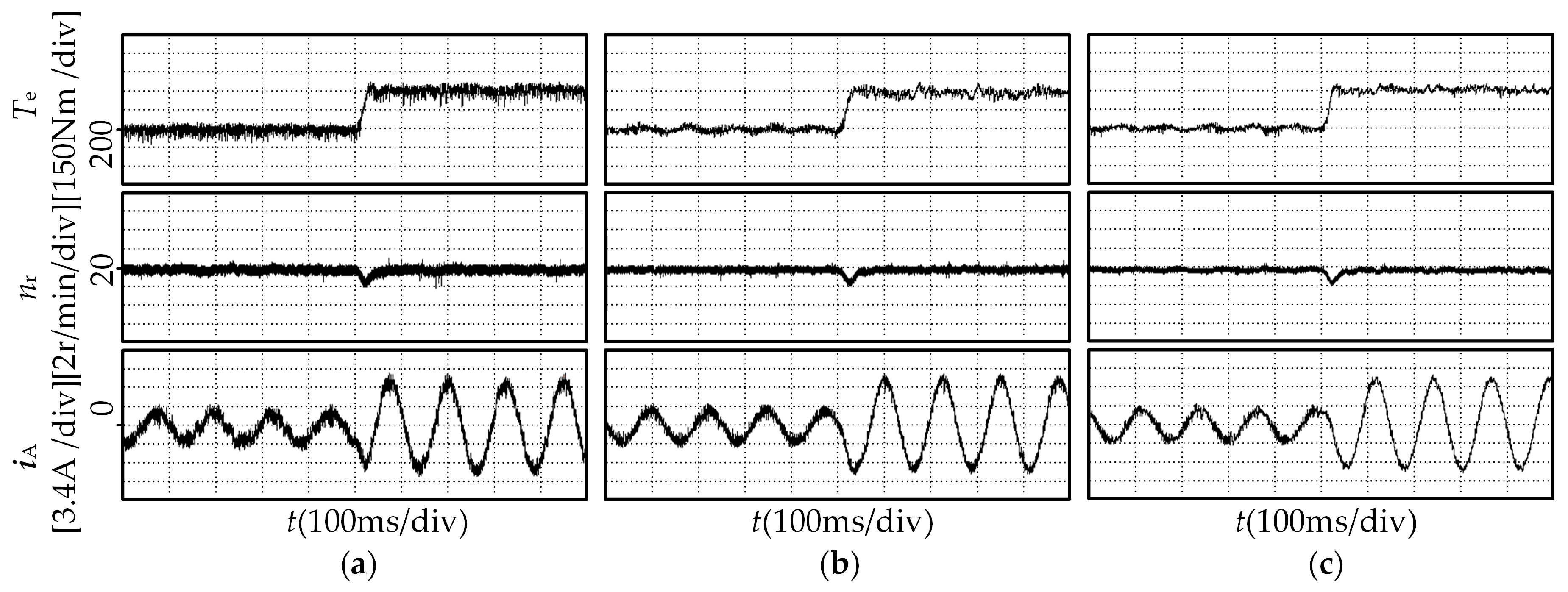
4.4. Dynamic Performance Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mohan, D.; Zhang, X.; Foo, G. Three level inverter feddirect torque control of IPMSM with constant switching frequency and torque ripple reduction. IEEE Trans. Ind. Electron. 2016, 63, 7908–7918. [Google Scholar] [CrossRef]
- Xia, C.L.; Wang, S.; Gu, X.; Yan, Y.; Shi, T.N. Direct torque control for VSI-PMSM using vector evaluation factor table. IEEE Trans. Ind. Electron. 2016, 63, 4571–4583. [Google Scholar] [CrossRef]
- Li, X.; Chau, K.T.; Wang, Y. Modeling of a field-modulated permanent-magnet machine. Energies 2016, 9, 1078. [Google Scholar] [CrossRef]
- Mercorelli, P.; Lehmann, K.; Liu, S. Robust Flatness Based Control of an Electromagnetic Linear Actuator Using Adaptive PID Controller. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003. [Google Scholar]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New sliding-mode observer for position sensorless control of permanent-magnet synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Mercorelli, P. A motion sensorless control for intake valves in combustion engines. IEEE Trans. Ind. Electron. 2017, 64, 3402–3412. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2012, 59, 1171–1183. [Google Scholar] [CrossRef]
- Deng, W.T.; Xia, C.L.; Yan, Y.; Geng, Q.; Shi, T.N. Online Multi-Parameter Identification of Surface-Mounted PMSM Considering Inverter Disturbance Voltage. IEEE Trans. Energy Convers. 2017, 32, 202–212. [Google Scholar] [CrossRef]
- Mercorelli, P. Parameters identification in a permanent magnet three-phase synchronous motor of a city-bus for an intelligent drive assistant. Int. J. Model. Identif. Control 2014, 21, 352–361. [Google Scholar] [CrossRef]
- Lesani, M.J.; Mahmoudi, H.; Ebrahim, M.; Varzali, S.; Khaburi, D.A. Predictive torque control of induction motor based on improved fuzzy control method. In Proceedings of the 2013 13th Iranian Conference on Fuzzy Systems (IFSC), Qazvin, Iran, 27–29 August 2013. [Google Scholar]
- Geyer, T. Model predictive direct torque control: Derivation and analysis of the state-feedback control law. IEEE Trans. Ind. Appl. 2013, 49, 2146–2157. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. Torque ripple minimization for direct torque control of PMSM with modified FCSMPC. IEEE Trans. Ind. Appl. 2016, 52, 4855–4864. [Google Scholar] [CrossRef]
- Xie, W.; Wang, X.C.; Wang, F.X.; Xu, W.; Kennel, R.; Gerling, D. Dynamic loss minimization of finite control set-model predictive torque control for electric drive system. IEEE Trans. Power Electron. 2016, 31, 849–860. [Google Scholar] [CrossRef]
- Tian, L.; Zhao, J.; Sun, J. Sensorless control of interior permanent magnet synchronous motor in low-speed region using novel adaptive filter. Energies 2016, 9, 1084. [Google Scholar] [CrossRef]
- Xia, C.L.; Qiu, X.D.; Wang, Z.Q.; Shi, T.N. Predictive torque control for voltage source inverter-permanent magnet synchronous motor based on equal torque effect. IET Electr. Power Appl. 2016, 10, 208–216. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.; Kennel, R.; Quevedo, D.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Maeda, T.; Doki, S. Improvement of torque control system of PMSM based on model predictive control. In Proceedings of the 37th Annual Conf. on IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011. [Google Scholar]
- Zhang, Y.C.; Yang, H.T.; Xia, B. Model predictive control of induction motor drives: Torque control versus flux control. IEEE Trans. Ind. Appl. 2016, 52, 4050–4060. [Google Scholar] [CrossRef]
- Li, J.; Huang, X.Y.; Niu, F.; You, C.J.; Wu, L.J.; Fang, Y.T. Prediction error analysis of finite-control-set model predictive current control for IPMSMs. Energies 2018, 11, 2051. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Correa, P.; Pacas, M.; Rodriguez, J. Predictive torque control for inverter-fed induction machines. IEEE Trans. Ind. Electron. 2007, 54, 1073–1079. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Zhang, X.G.; Hou, B.S. Double Vectors Model Predictive Torque Control without Weighting Factor Based on Voltage Tracking Error. IEEE Trans. Power Electron. 2018, 33, 2368–2380. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Yang, H.T. Model predictive torque control of induction motor drives with optimal duty cycle control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Nui, F.; Li, K.; Wang, Y. Model predictive direct torque control for permanent magnet synchronous machines based on duty ratio modulation. Trans. China Electrotech. Soc. 2014, 29, 20–29. [Google Scholar]
- Ren, Y.; Zhu, Z.Q.; Liu, J.M. Direct torque control of permanent magnet synchronous machine drives with a simple duty ratio regulator. IEEE Trans. Ind. Electron. 2014, 61, 5249–5258. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Zhu, J.G. Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency. IEEE Trans. Power Electron. 2011, 26, 235–248. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Yang, H.T. Generalized two-vector-based model predictive torque control of induction motor drives. IEEE Trans. Power Electron. 2015, 30, 3818–3829. [Google Scholar] [CrossRef]
- Zhou, Z.Q.; Xia, C.L.; Yan, Y.; Wang, Z.Q.; Shi, T.N. Torque Ripple Minimization of Predictive Torque Control for PMSM with Extended Control Set. IEEE Trans. Ind. Electron. 2017, 64, 6930–6939. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Yang, H.T. Two-Vector-Based Model Predictive Torque Control without Weighting Factors for Induction Motor Drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Huang, L.L.; Xu, D.L.; Liu, J.L.; Jin, J.L. Performance Evaluation of Two-Vector-Based Model Predictive Current Control of PMSM Drives. Chin. J. Electr. Eng. 2018, 4, 65–81. [Google Scholar]
- Abad, G.; Rodriguez, M.Á.; Poza, J. Two-level VSC based predictive direct torque control of the doubly fed Induction machine with reduced torque and flux ripples at low constant switching frequency. IEEE Trans. Energy Convers. 2008, 23, 570–580. [Google Scholar] [CrossRef]
- Li, C.; Xia, C.L.; Zhou, Z.Q.; Shi, T.N.; Yan, Y. Torque ripple reduction of permanent magnet synchronous motors based on predictive sequence control. In Proceedings of the 20th International Conference on Electrical Machines and Systems(ICEMS), Sydney, Auatralia, 11–14 August 2017. [Google Scholar]
- Vazquez, S.; Aguilera, R.P.; Acuna, P.; Pou, J.; Leon, J.I.; Franquelo, L.G.; Agelidis, V.G. Model predictive control for single-phase NPC converters based on optimal switching sequences. IEEE Trans. Ind. Electron. 2016, 63, 7533–7541. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, X.C.; Xie, W.; Wang, F.X.; Dou, M.F.; Kennel, R.M.; Lorenz, R.D.; Gerling, D. Deadbeat model-predictive torque control with discrete space-vector modulation for PMSM drives. IEEE Trans. Ind. Electron. 2017, 64, 3537–3547. [Google Scholar] [CrossRef]
- Lee, J.S.; Choi, C.H.; Seok, J.K.; Lorenz, R.D. Deadbeat-Direct torque and flux control of interior permanent magnet synchronous machines with discrete time stator current and stator flux linkage observer. IEEE Trans. Ind. Appl. 2011, 47, 1749–1758. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, Q.S.; Cui, T.K.; Zhang, P.M. Model-predictive current control of DC/AC inverters with time delay compensation. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016. [Google Scholar]
- Cortes, P.; Kouro, S.; Rocca, B.L.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in Model Predictive Control of power converters and drives. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 10–13 February 2009. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | Region | Candidate Voltage Vectors | ||
|---|---|---|---|---|
| v(1) | v(2) | v(3) | ||
| I | ① | (2/3)V1 + (1/3)V3 | (1/2)V1 + (1/2)V0 | V0 |
| ② | (2/3)V1 + (1/3)V3 | (1/2)V1 + (1/2)V0 | V1 | |
| ③ | (2/3)V1 + (1/3)V3 | (1/2)V1 + (1/2)V2 | V1 | |
| II | ① | (2/3)V2 + (1/3)V6 | (1/2)V2 + (1/2)V7 | V7 |
| ② | (2/3)V2 + (1/3)V6 | (1/2)V2 + (1/2)V7 | V2 | |
| ③ | (2/3)V2 + (1/3)V6 | (1/2)V2 + (1/2)V1 | V2 | |
| III | ① | (2/3)V2 + (1/3)V4 | (1/2)V2 + (1/2)V7 | V7 |
| ② | (2/3)V2 + (1/3)V4 | (1/2)V2 + (1/2)V7 | V2 | |
| ③ | (2/3)V2 + (1/3)V4 | (1/2)V2 + (1/2)V3 | V2 | |
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Number of pole pairs | p | – | 24 |
| Permanent magnet flux | Ψf | Wb | 1.63 |
| Stator resistance | Rs | Ω | 1.89 |
| d-axis inductance | Ld | mH | 44.6 |
| q-axis inductance | Lq | mH | 46.4 |
| Rated speed | nN | r/min | 50 |
| Rated torque | TN | Nm | 1000 |
| Rated voltage | UN | V | 380 |
| Rated current | IN | A | 13.5 |
| Item | Traditional FCS-PTC | Duty-PTC | Proposed Strategy | |
|---|---|---|---|---|
| Working condition 1 | favsw (kHz) | 1.61 | 2.09 | 1.63 |
| δT (Nm) | 7.96 | 6.64 | 5.52 | |
| δψ (Wb) | 0.0096 | 0.0077 | 0.0051 | |
| ITHD (%) | 6.54 | 4.96 | 4.07 |
| Item | Traditional FCS-PTC | Duty-PTC | Proposed Strategy | |
|---|---|---|---|---|
| Working condition 2 | favsw (kHz) | 1.61 | 2.03 | 1.61 |
| δT (Nm) | 8.13 | 6.41 | 5.44 | |
| δψ (Wb) | 0.0094 | 0.0071 | 0.0051 | |
| ITHD (%) | 6.36 | 4.87 | 4.01 |
| Item | Traditional FCS-PTC | Duty-PTC | Proposed Strategy | |
|---|---|---|---|---|
| Working condition 3 | favsw (kHz) | 1.59 | 1.94 | 1.61 |
| δT (Nm) | 7.89 | 6.67 | 5.42 | |
| δψ (Wb) | 0.0097 | 0.0069 | 0.0057 | |
| ITHD (%) | 6.28 | 4.85 | 4.01 |
| Item | Traditional FCS-PTC | Duty-PTC | Proposed Strategy | |
|---|---|---|---|---|
| Comprehensive comparison | Steady performance | worse | better | best |
| favsw (kHz) | low | high | low | |
| Dynamic response | fast | fast | fast | |
| Execution time (μs) | 46 | 61 | 69 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Shi, T.; Yan, Y.; Gu, X. Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table. Energies 2019, 12, 163. https://doi.org/10.3390/en12010163
Xu Y, Shi T, Yan Y, Gu X. Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table. Energies. 2019; 12(1):163. https://doi.org/10.3390/en12010163
Chicago/Turabian StyleXu, Yan, Tingna Shi, Yan Yan, and Xin Gu. 2019. "Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table" Energies 12, no. 1: 163. https://doi.org/10.3390/en12010163
APA StyleXu, Y., Shi, T., Yan, Y., & Gu, X. (2019). Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table. Energies, 12(1), 163. https://doi.org/10.3390/en12010163