Energy Consumption Optimization for the Formation of Multiple Robotic Fishes Using Particle Swarm Optimization


Abstract
1. Introduction
2. Materials and Methods
2.1. Methods of Robotic Fish
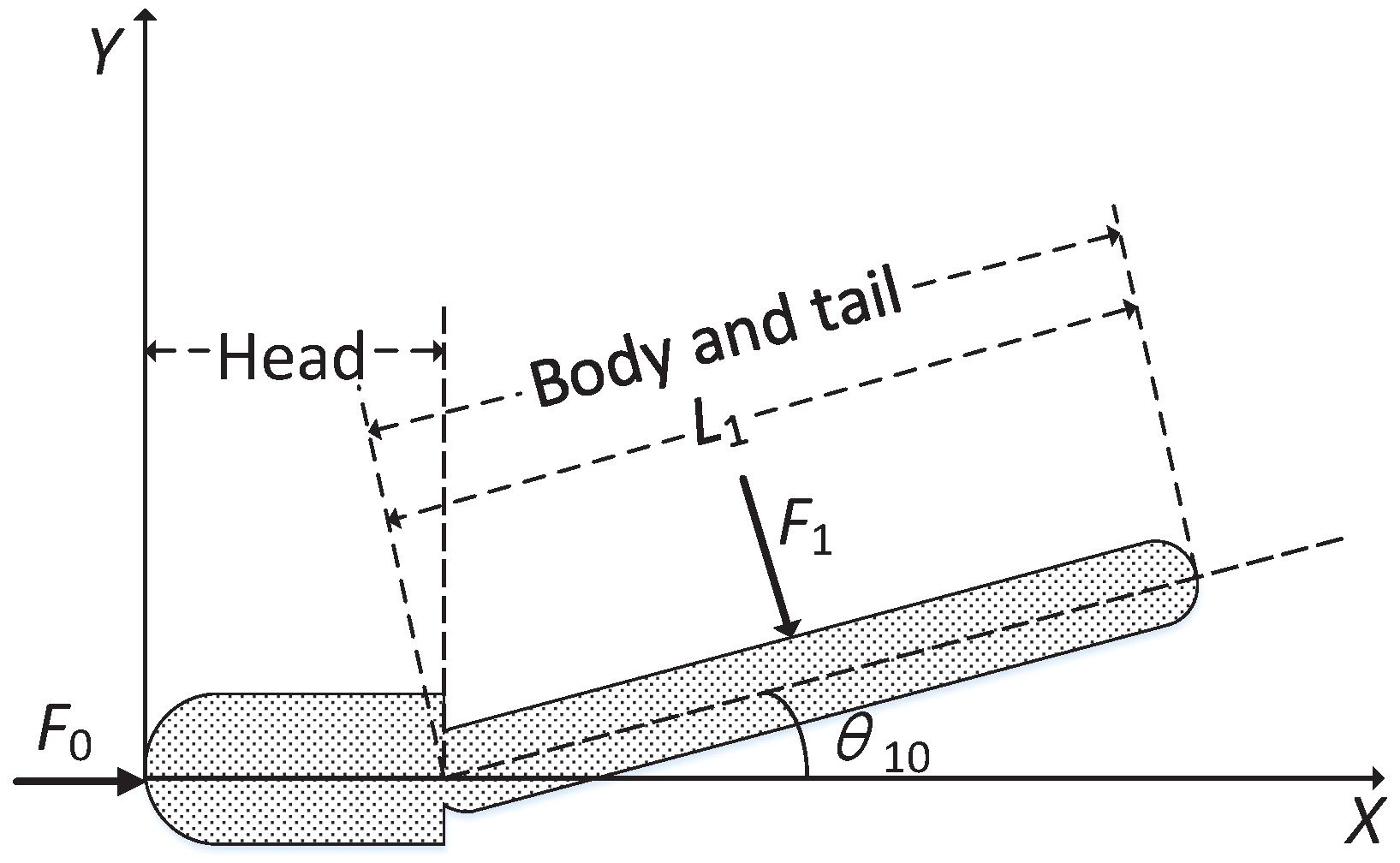
2.1.1. The Kinematic Model
2.1.2. The Dynamical Model
2.1.3. The Energy Consumption of the Formation
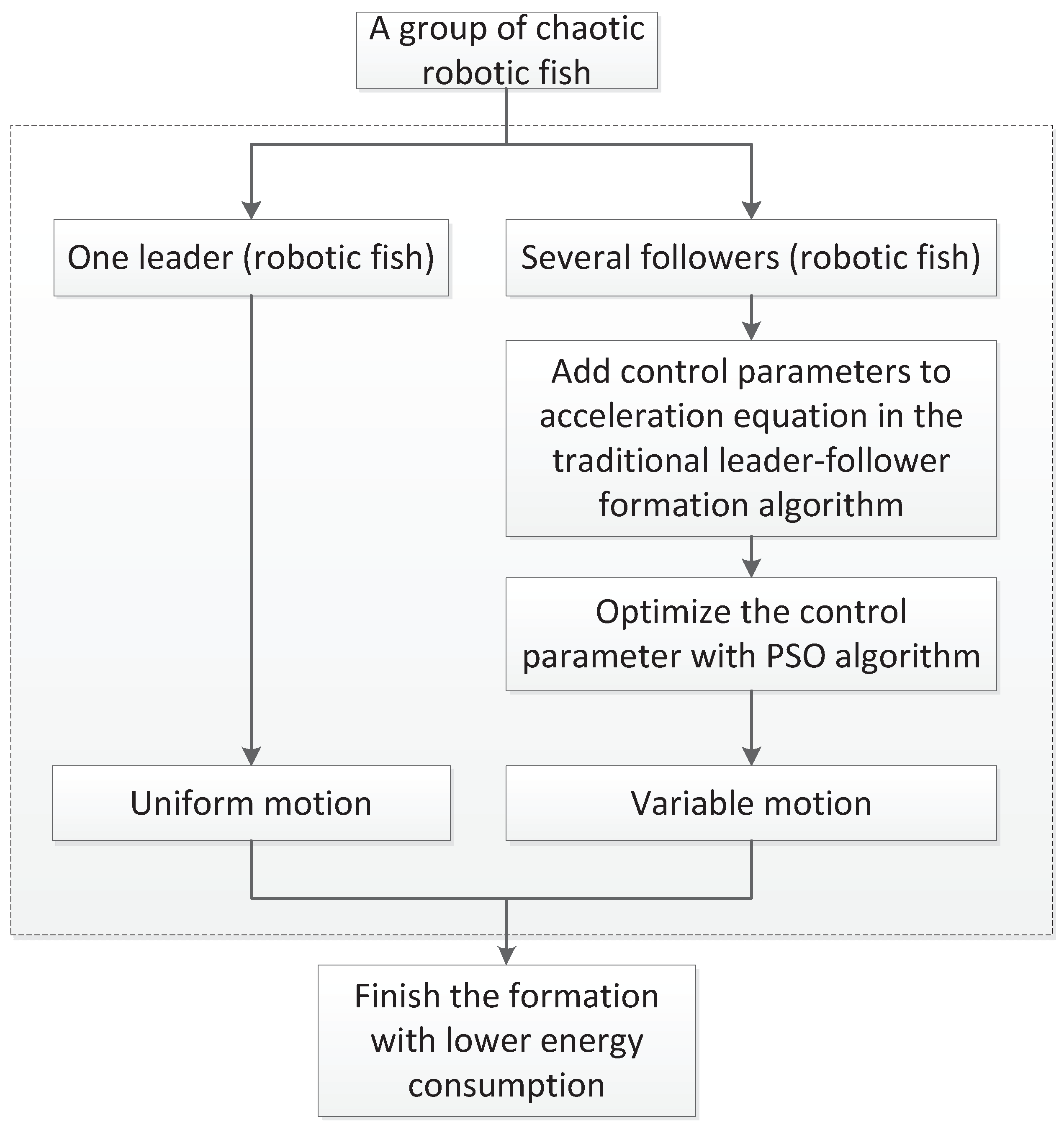
2.2. Energy Optimized Leader-Follower Formation Algorithm
2.2.1. The Leader-Follower Formation and Acceleration Equation
- 1.
- When , ;
- 2.
- When 2D, ;
- 3.
- When is equal to a certain value between 0 and 2D, is located in its unique minimum.
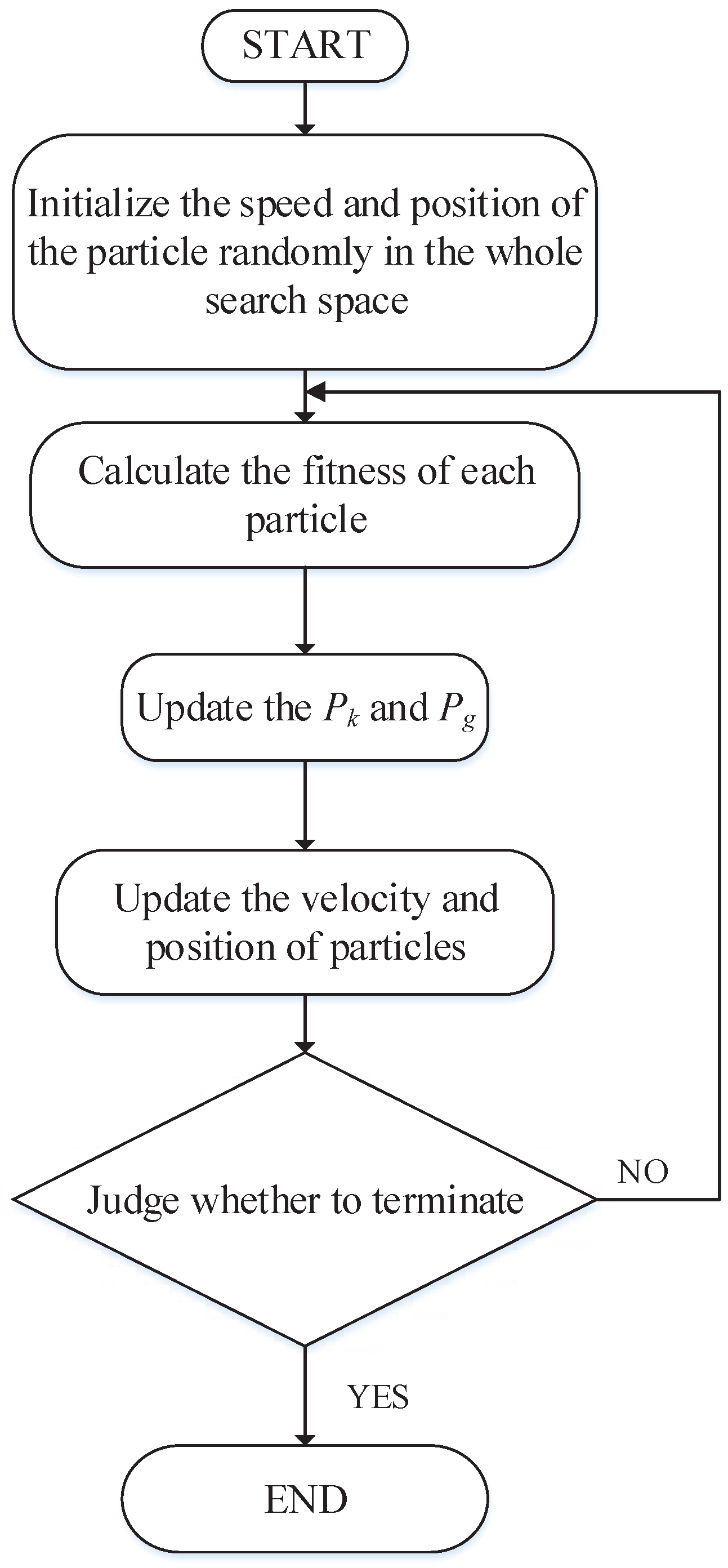
2.2.2. Optimization of Control Parameter
2.2.3. The Proof of the Stability
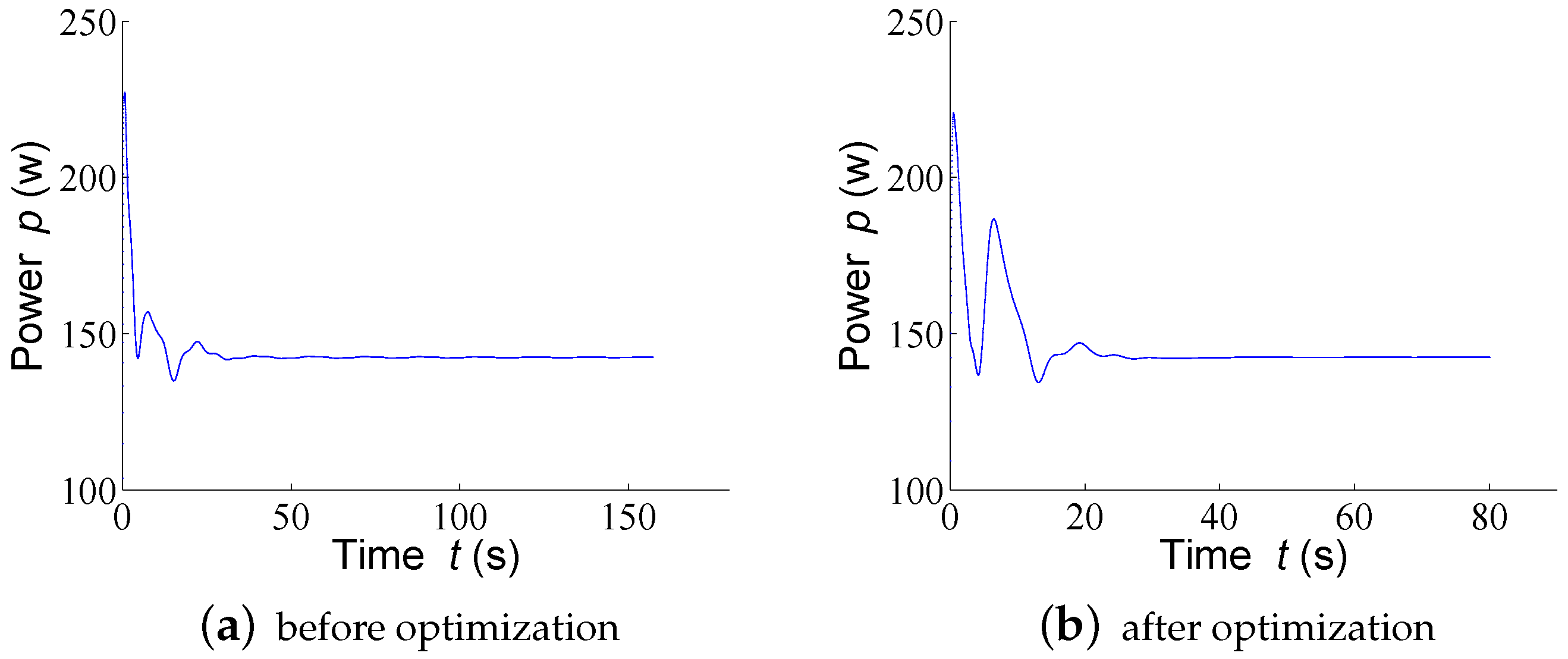
3. Results
- ,
- ,
- ,
- ,
- ,
- ,
- ,
- ,
- ,
- .
The Change of
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yu, J.; Tan, M.; Wang, S.; Chen, E. Development of a biomimetic robotic fish and its control algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 1798–1810. [Google Scholar] [CrossRef]
- Yu, J.; Wu, Z.; Wang, M.; Tan, M. CPG Network Optimization for a Biomimetic Robotic Fish via PSO. IEEE Trans. Neural Net. Learn. Syst. 2016, 27, 1962. [Google Scholar] [CrossRef] [PubMed]
- Triantafyllou, M.S.; Triantafyllou, G.S. An Efficient Swimming Machine. Sci. Am. 1995, 272, 64–70. [Google Scholar] [CrossRef]
- Gu, D.; Wang, Z. Leader-Follower Flocking: Algorithms and Experiments. IEEE Trans. Control Syst. Technol. 2009, 17, 1211–1219. [Google Scholar]
- Yu, W.; Chen, G.; Cao, M. Distributed leader-follower flocking control for multi-agent dynamical systems with time-varying velocities. Syst. Control Lett. 2010, 59, 543–552. [Google Scholar] [CrossRef]
- Su, H.; Wang, X.; Chen, G. Rendezvous of multiple mobile agents with preserved network connectivity. Syst. Control Lett. 2010, 59, 313–322. [Google Scholar] [CrossRef]
- Jia, Y.; Zhang, W. Distributed adaptive flocking of robotic fish system with a leader of bounded unknown input. Int. J. Control Autom. Syst. 2014, 12, 1049–1058. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model; ACM: New York, NY, USA, 2015; pp. 25–34. [Google Scholar]
- Jia, Y.; Wang, L. Leader-Follower Flocking of Multiple Robotic Fish. IEEE/ASME Trans. Mechatron. 2015, 20, 1372–1383. [Google Scholar] [CrossRef]
- Hu, Q.; Zhou, H. IPMC propelled biomimetics robotic fish energy consumption model construction and its application to energy-saving control. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics, Guilin, China, 19–23 December 2009; pp. 2151–2156. [Google Scholar]
- Wang, M.C.C.; Wang, W.; Xie, G.; Shi, H. Real-time energy monitoring and management system and its application on bionic robotic fish. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3256–3261. [Google Scholar]
- Zhu, W.; Wang, X.; Xu, M.; Yang, J. A wave energy conversion mechanism applied in robotic fish. In Proceedings of the Ieee/asme International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 319–324. [Google Scholar]
- Shen, Y.; Guo, B. Energy-efficient cluster-head selection with fuzzy logic for robotic fish swarm. In Proceedings of the International Conference on Fuzzy Systems and Knowledge Discovery, Zhangjiajie, China, 15–17 August 2015; pp. 513–518. [Google Scholar]
- Tanner, H.G. On the controllability of nearest neighbor interconnections. In Proceedings of the 43rd IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; pp. 2467–2472. [Google Scholar]
- Low, K.H. Locomotion and Depth Control of Robotic Fish with Modular Undulating Fins. Int. J. Autom. Comput. 2006, 3, 348–357. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, L.; Yu, J.; Tan, M. Coordinated Transport by Multiple Biomimetic Robotic Fish in Underwater Environment. IEEE Trans. Control Syst. Technol. 2007, 15, 658–671. [Google Scholar] [CrossRef]
- Klein, D.J.; Bettale, P.K.; Triplett, B.I.; Morgansen, K.A. Autonomous underwater multivehicle control with limited communication: Theory and experiment. IFAC Proc. Vol. 2008, 41, 113–118. [Google Scholar] [CrossRef]
- Anderson, J.M.; Streitlien, K.; Barrett, D.S.; Triantafyllou, M.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef]
- Liang, J.; Wang, T.; Wen, L. Development of a two-joint robotic fish for real-world exploration. J. Field Robot. 2011, 28, 70–79. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, S.; Wen, L. A Stiffness-Adjusting Method to Improve Thrust Efficiency of a Two-Joint Robotic Fish. Adv. Mech. Eng. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Latombe, J.C. Robot Motion Planning; Kluwer Academic Publishers: Alphen, The Netherlands, 1991; pp. 628–649. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 1995; pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the IEEE World Congress on Computational Intelligence, 1998 IEEE International Conference on Evolutionary Computation Proceedings, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999; pp. 1945–1950. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 1.1 | 1.2 | 1.3 | 1.4 | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1.5088 | 1.1378 | 1.2397 | 1.3 | 1.4793 | 0.861 | 1.3 | 1.3 | 1.5989 | 1.4157 | |
| 0.8598 | 1.3096 | 1.3521 | 1.3 | 1.8527 | 0.7395 | 1.3 | 1.3 | 1.0538 | 0.8627 | |
| 1.2889 | 1.4393 | 1.071 | 0.6608 | 0.8887 | 0.7652 | 0.6 | 0.6 | 1.0298 | 1.0283 | |
| 1.842 | 1.364 | 1.8197 | 1.3 | 1.6125 | 0.9338 | 1.3 | 1.3 | 1.1966 | 1.135 | |
| 1.734 | 1.7699 | 1.4217 | 1.3 | 1.7243 | 1.1482 | 1.3 | 0.8494 | 1.1617 | 1.5876 | |
| 1.2904 | 0.8963 | 1.2625 | 0.7657 | 1.5769 | 0.9909 | 1.3 | 0.6 | 1.6805 | 1.6112 | |
| 1.5752 | 0.7295 | 0.9108 | 0.6 | 1.3054 | 1.0422 | 0.8243 | 1.3 | 0.8337 | 1.827 | |
| 1.3586 | 0.9115 | 1.7968 | 1.3 | 1.8707 | 0.1306 | 1.3 | 0.6 | 1.6113 | 1.7266 | |
| 1.2396 | 0.9763 | 0.6826 | 0.8738 | 1.3624 | 1.0658 | 0.6 | 1.3 | 0.9258 | 0.9837 | |
| Energy/ | 1.44 | 1.4 | 1.41 | 1.17 | 1.41 | 1.92 | 1.3 | 1.18 | 1.44 | 1.54 |
| 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 1.1 | 1.2 | 1.3 | 1.4 | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1.3 | 0.6964 | 0.74 | 1.3 | 0.8047 | 1.3 | 1.3 | 1.3 | 0.6 | 1.3 | |
| 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 1.3 | 0.6 | |
| 1.3 | 1.3 | 0.9041 | 1.3 | 1.3 | 1.3 | 1.3 | 0.9855 | 1.1883 | 1.3 | |
| 1.1178 | 0.6 | 1.3 | 1.3 | 1.3 | 0.6 | 1.3 | 1.2423 | 0.6 | 0.6 | |
| 1.3 | 1.3 | 1.3 | 0.816 | 1.3 | 1.3 | 0.971 | 0.6 | 1.3 | 0.6 | |
| 0.7205 | 0.6608 | 0.74 | 1.3 | 0.9921 | 1.3 | 0.6 | 1.3 | 1.3 | 1.0629 | |
| 1.1277 | 0.6608 | 0.74 | 1.1326 | 1.246 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | |
| 1.2549 | 0.6608 | 0.74 | 1.3 | 1.3 | 1.3 | 1.3 | 0.6978 | 1.3 | 0.9269 | |
| 1.3 | 1.3 | 0.74 | 1.0112 | 0.6 | 0.6 | 1.3 | 1.3 | 1.3 | 1.3 | |
| Energy/ | 7.92 | 7.99 | 7.62 | 8.21 | 8.37 | 8.27 | 7.88 | 8.06 | 7.93 | 8.53 |
| 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 1.1 | 1.2 | 1.3 | 1.4 | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.6 | 1.2057 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 0.7074 | 1.3 | |
| 0.6 | 1.3 | 0.6 | 0.6 | 1.2075 | 0.6 | 0.6 | 0.6 | 0.7074 | 1.3 | |
| 0.9978 | 0.8908 | 1.3 | 1.1176 | 1.1588 | 1.3 | 1.3 | 0.6 | 1.3 | 1.3 | |
| 1.3 | 0.7156 | 1.3 | 1.3 | 1.2166 | 1.3 | 1.3 | 1.3 | 0.6 | 0.6 | |
| 1.3 | 1.055 | 1.3 | 0.8204 | 0.9112 | 0.6 | 0.6 | 1.3 | 1.3 | 1.3 | |
| 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.2881 | 0.6 | 1.3 | 1.3 | |
| 1.3 | 0.6534 | 1.284 | 1.3 | 0.9766 | 1.3 | 1.3 | 1.3 | 0.6 | 1.3 | |
| 1.3 | 1.3 | 0.7129 | 0.6 | 0.9719 | 0.7216 | 0.6 | 0.9332 | 1.3 | 1.3 | |
| 1.3 | 1.3 | 1.3 | 1.2942 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | |
| Energy/ | 7.23 | 6.35 | 7.48 | 6.65 | 6.73 | 7.82 | 7.06 | 7.48 | 6.65 | 7.85 |
| (a) The Value of. | ||||
| After Optimization | Before Optimization | |||
| Fixed | ||||
| 1.2057 | 1.3 | 0.74 | 1 | |
| 1.3 | 1.3 | 0.6 | 1 | |
| 0.8908 | 0.6608 | 0.9041 | 1 | |
| 0.7156 | 1.3 | 1.3 | 1 | |
| 1.055 | 1.3 | 1.3 | 1 | |
| 1.3 | 0.7657 | 0.74 | 1 | |
| 0.6534 | 0.6 | 0.74 | 1 | |
| 1.3 | 1.3 | 0.74 | 1 | |
| 1.3 | 0.8738 | 0.74 | 1 | |
| (b) Total Energy of Each Formation /. | ||||
| Rectangle-Shaped | Lambdoid-Shaped | Ring-Shaped | ||
| After optimization | 6.35 × | 1.17 × | 7.62 × | |
| Before optimization | 6.4 × | 2.27 × | 1.22 × | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Yu, L.; Lv, Z.; Zhang, J.; Fan, D.; Dai, W. Energy Consumption Optimization for the Formation of Multiple Robotic Fishes Using Particle Swarm Optimization. Energies 2018, 11, 2023. https://doi.org/10.3390/en11082023
Xu D, Yu L, Lv Z, Zhang J, Fan D, Dai W. Energy Consumption Optimization for the Formation of Multiple Robotic Fishes Using Particle Swarm Optimization. Energies. 2018; 11(8):2023. https://doi.org/10.3390/en11082023
Chicago/Turabian StyleXu, Dong, Luo Yu, Zhiyu Lv, Jiahuang Zhang, Di Fan, and Wei Dai. 2018. "Energy Consumption Optimization for the Formation of Multiple Robotic Fishes Using Particle Swarm Optimization" Energies 11, no. 8: 2023. https://doi.org/10.3390/en11082023
APA StyleXu, D., Yu, L., Lv, Z., Zhang, J., Fan, D., & Dai, W. (2018). Energy Consumption Optimization for the Formation of Multiple Robotic Fishes Using Particle Swarm Optimization. Energies, 11(8), 2023. https://doi.org/10.3390/en11082023