Design of a Path-Tracking Steering Controller for Autonomous Vehicles

Abstract
1. Introduction
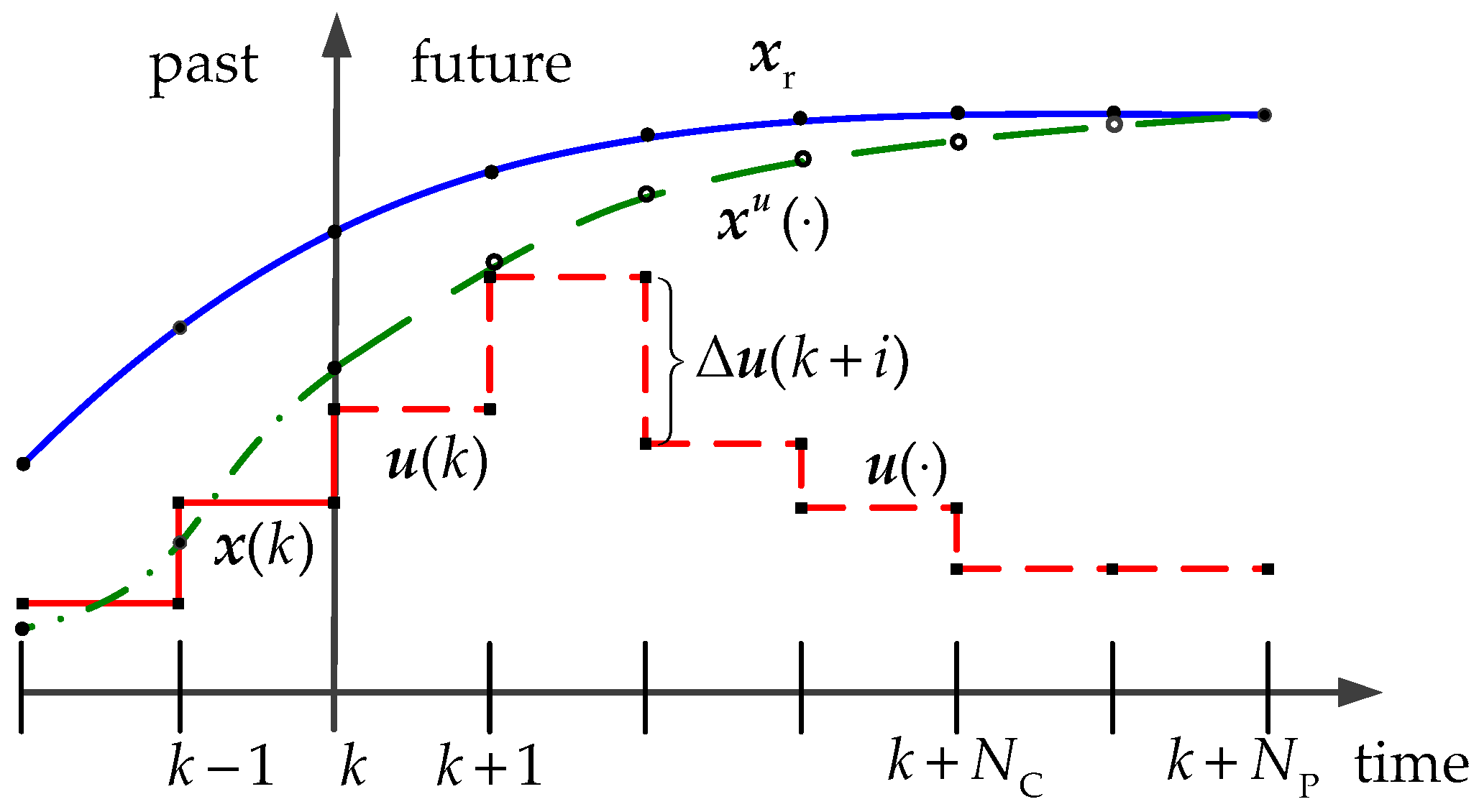
2. MPC Algorithms
3. Modelling
3.1. Nonlinear Model
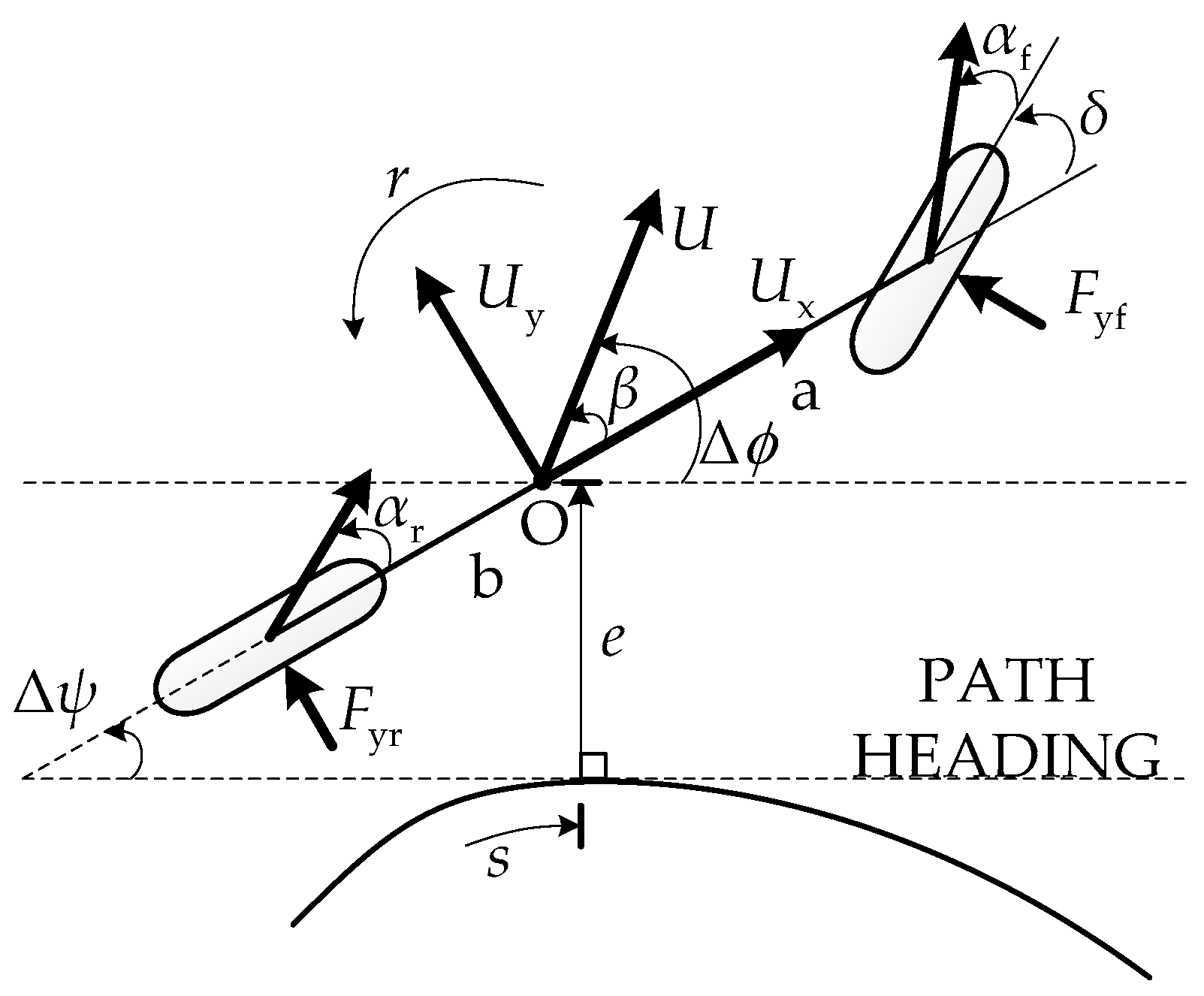
3.1.1. Vehicle Dynamic Model
3.1.2. Tire Model
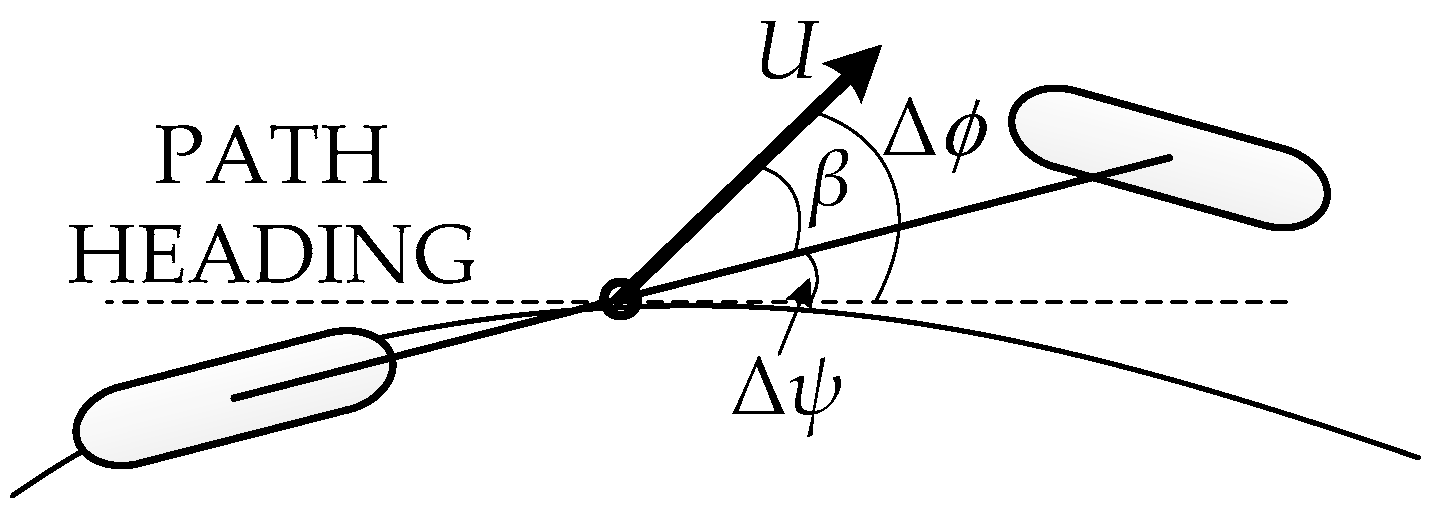
3.1.3. Path-Tracking Model
3.2. Model Linearization
3.2.1. Vehicle Dynamic Model
- (1)
- Suppose the steering angle increments are fixed at every step over the prediction horizon, and are independent of the control sequence u(·), that is:where is the supposed steering angle increment at step i + 1 and is the corresponding fixed increment, which will be determined later.
- (2)
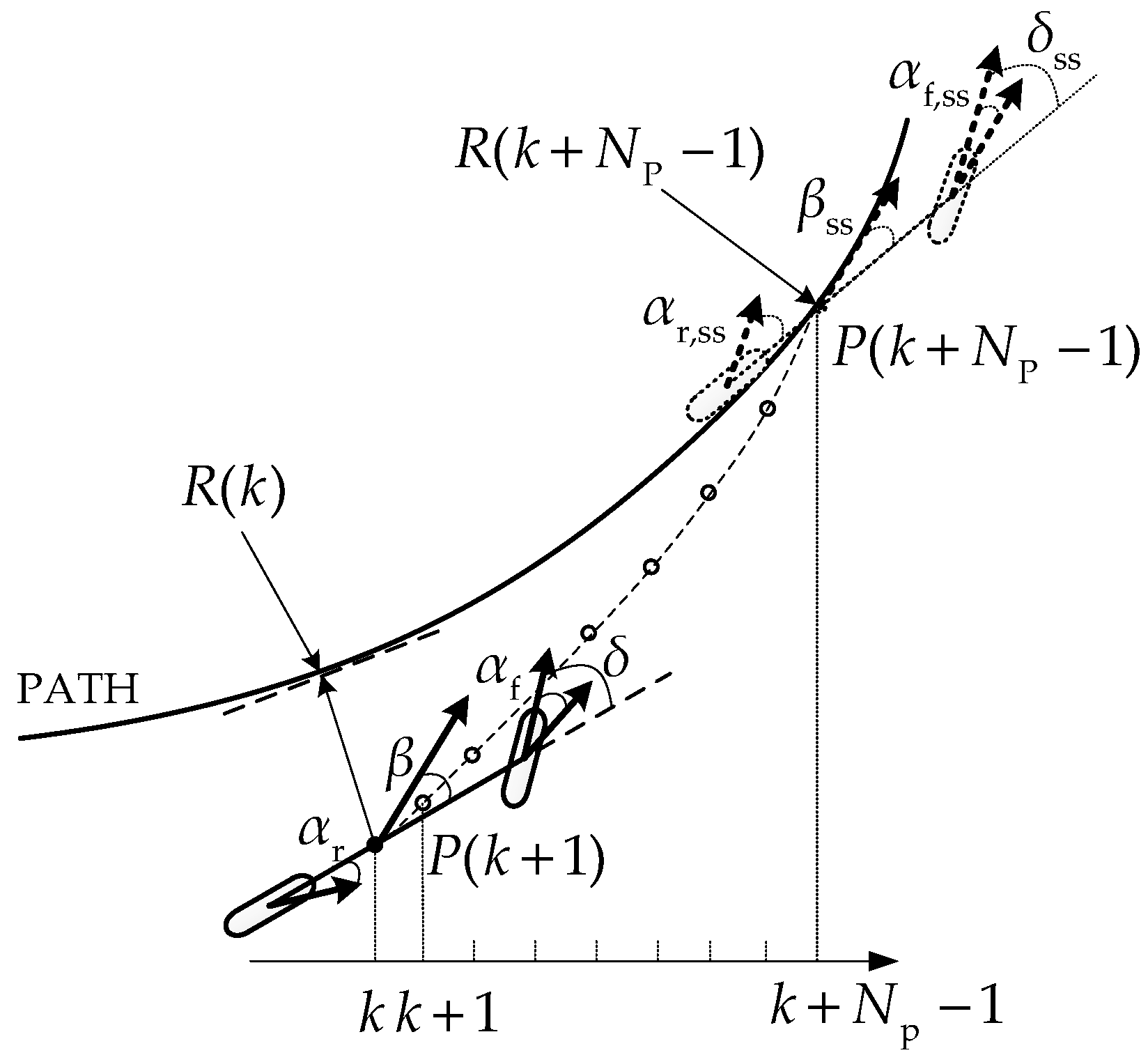
- Suppose the vehicle will reach the desired path at step of the prediction horizon, and will subsequently track the path without deviation, as shown in Figure 3. Then, the vehicle at step is assumed to be in the steady state. Hence:where , and are the supposed lateral deviation, steering angle, and tire slip angle, respectively, and , are the steady-state steering angle and tire slip angle, respectively.
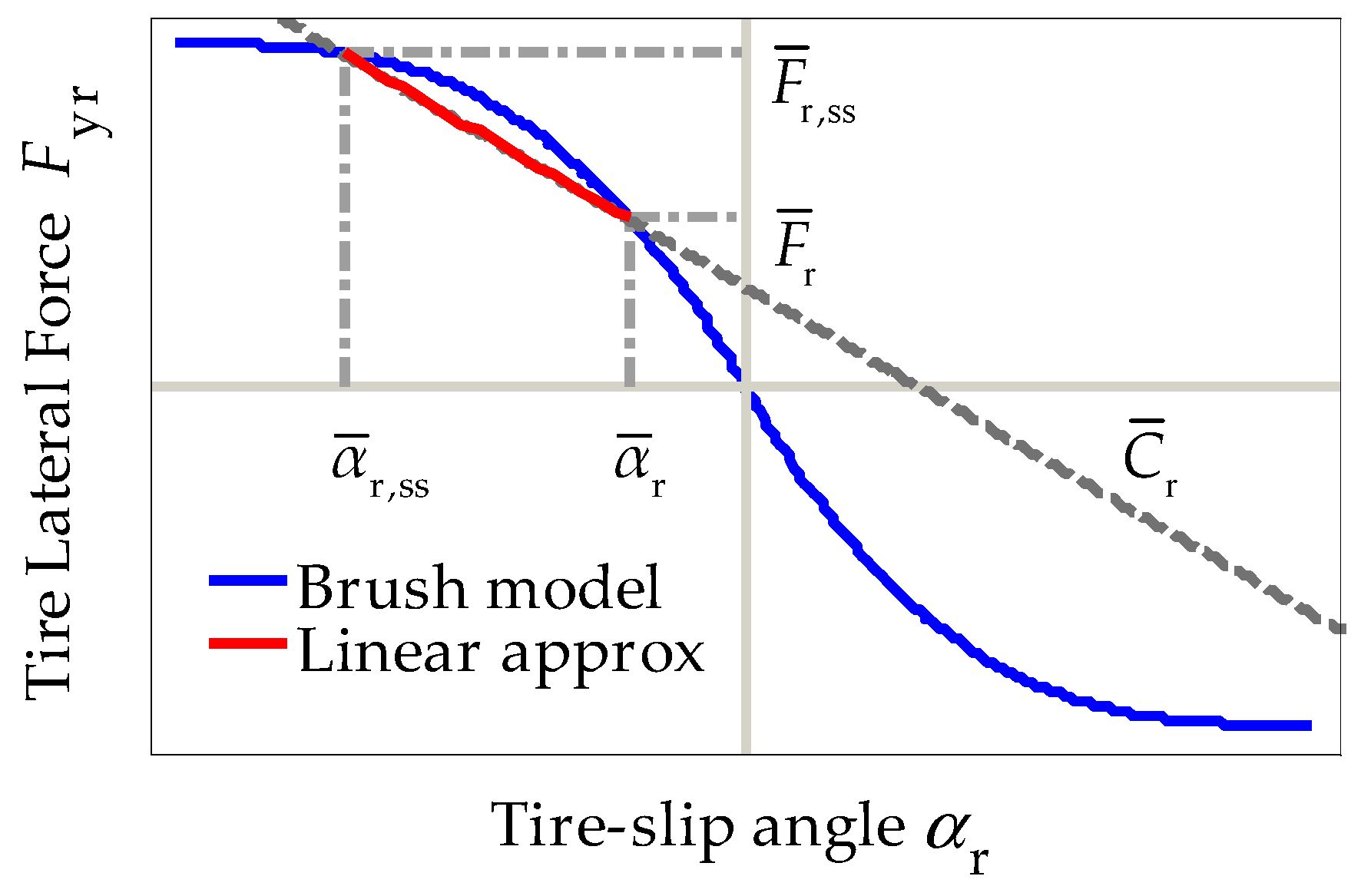
3.2.2. Tire Model
3.2.3. Tracking Model
4. MPC Controller Design
4.1. Problem Statement
4.2. Control Model
4.3. Constraints
4.4. MPC Formulation
5. Simulations and Results
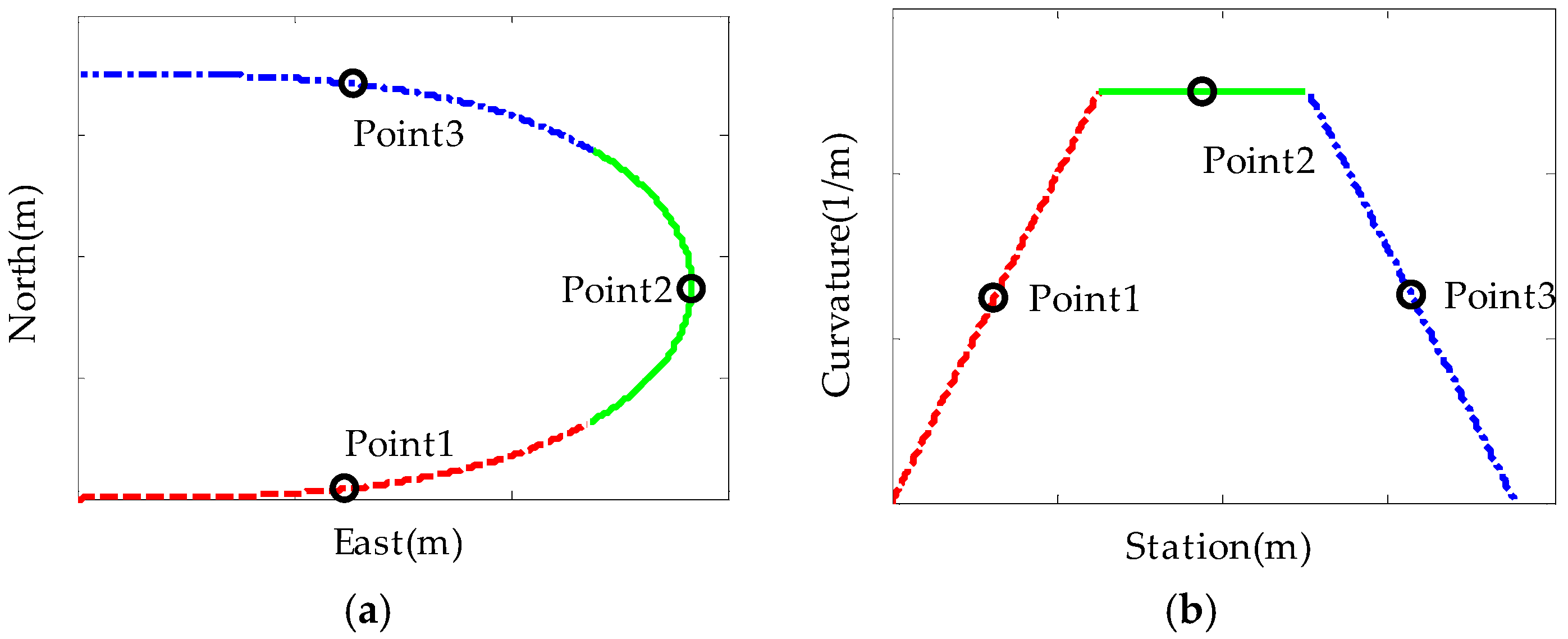
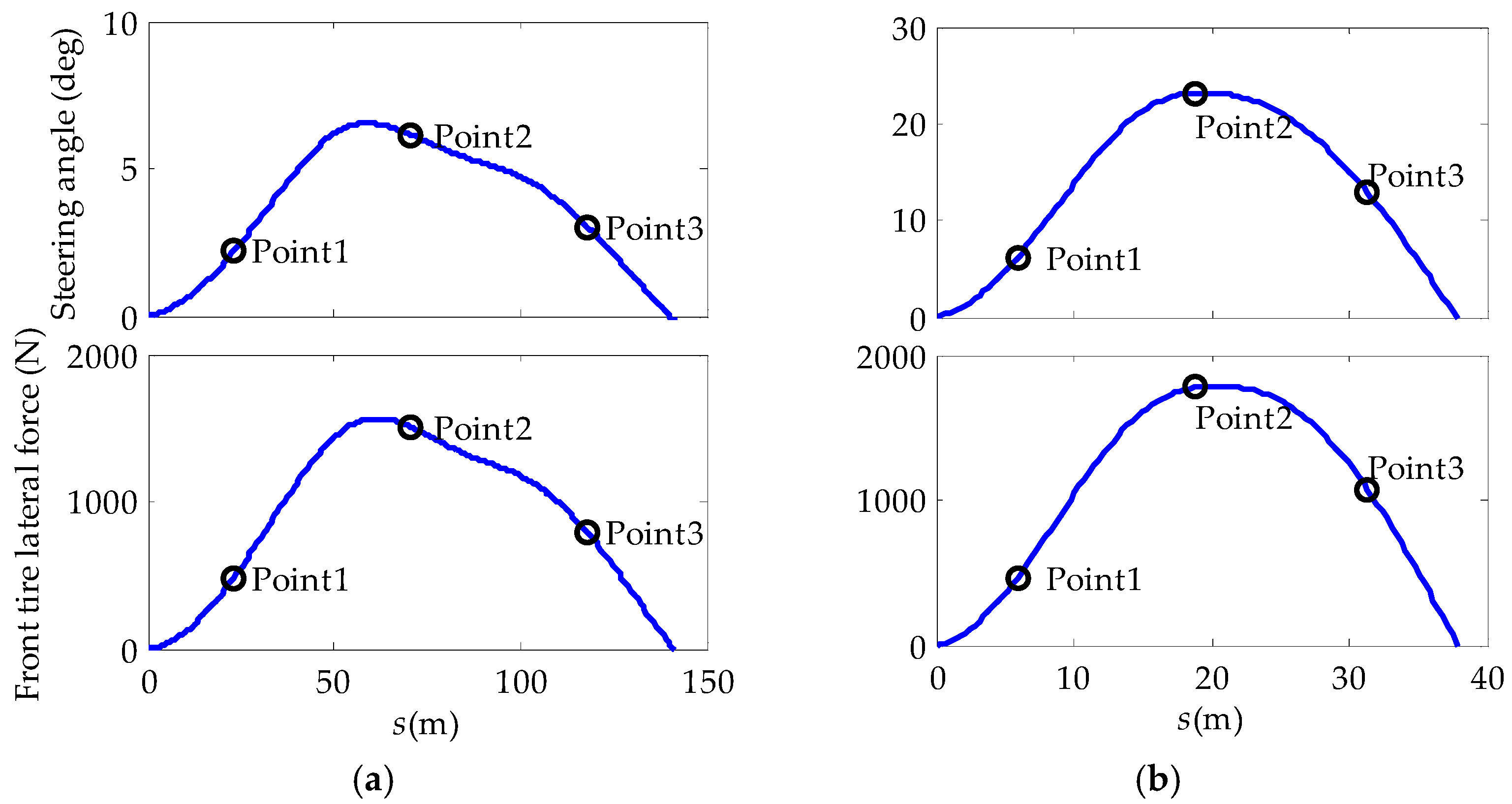
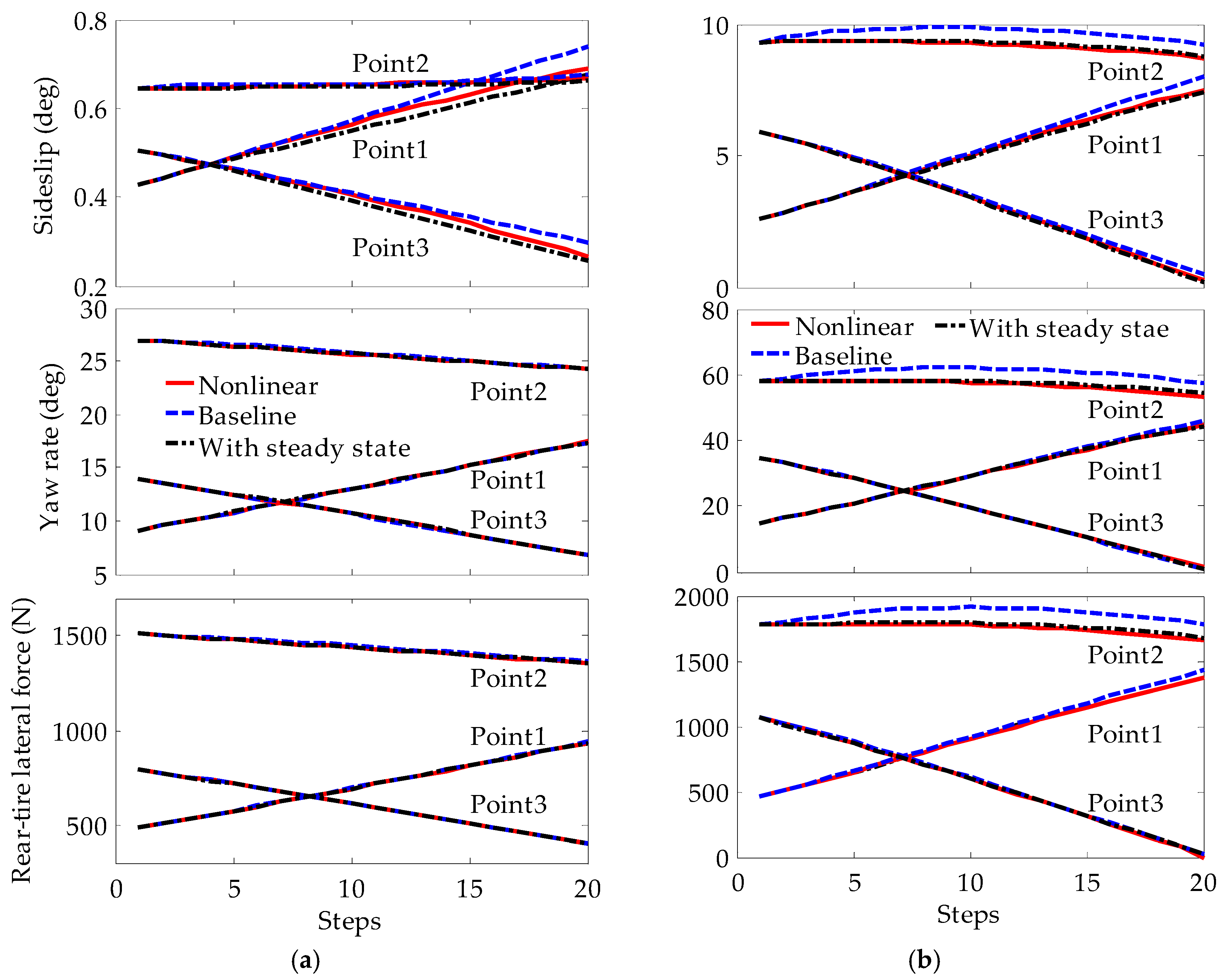
5.1. Model Validation
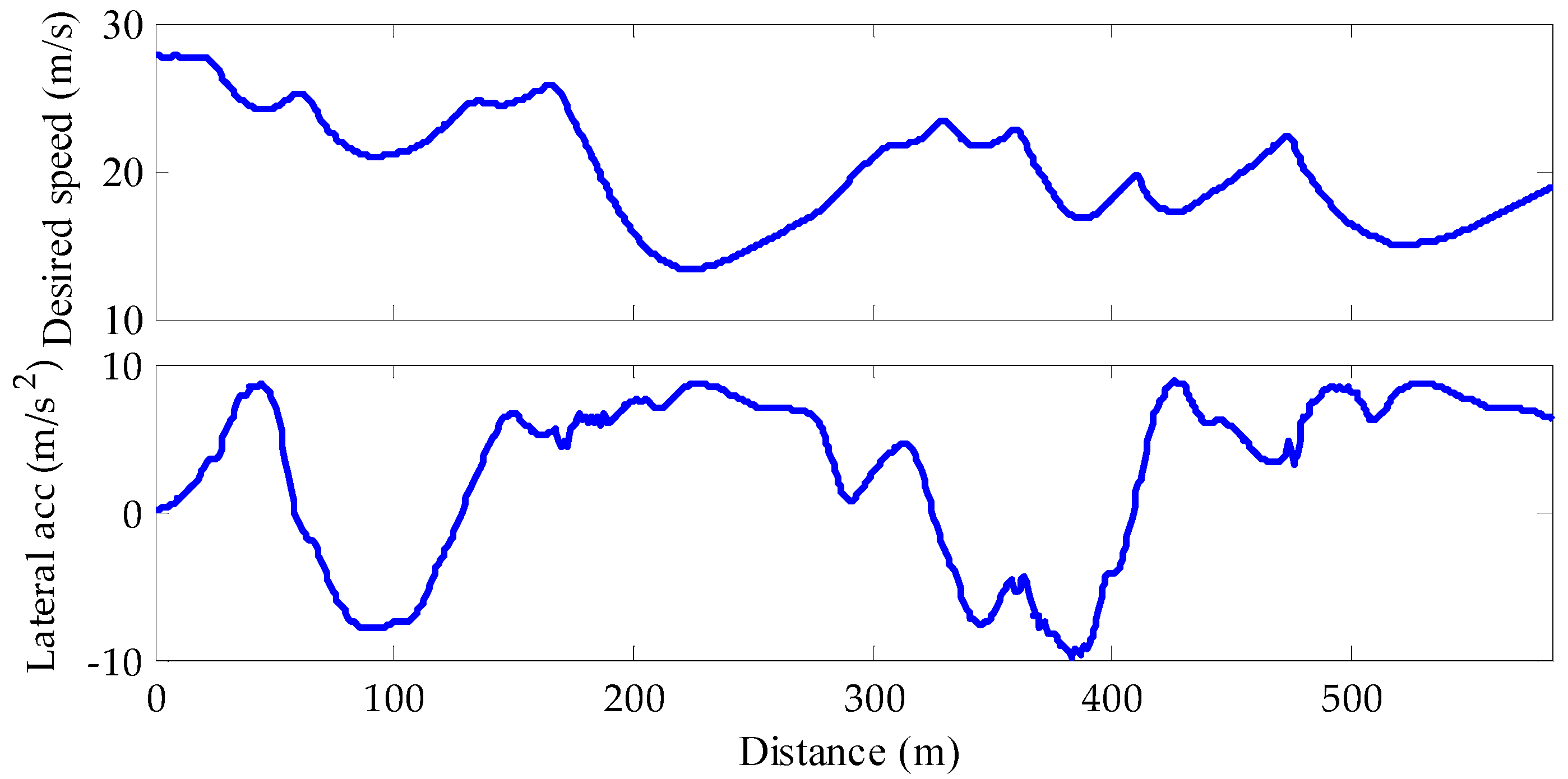
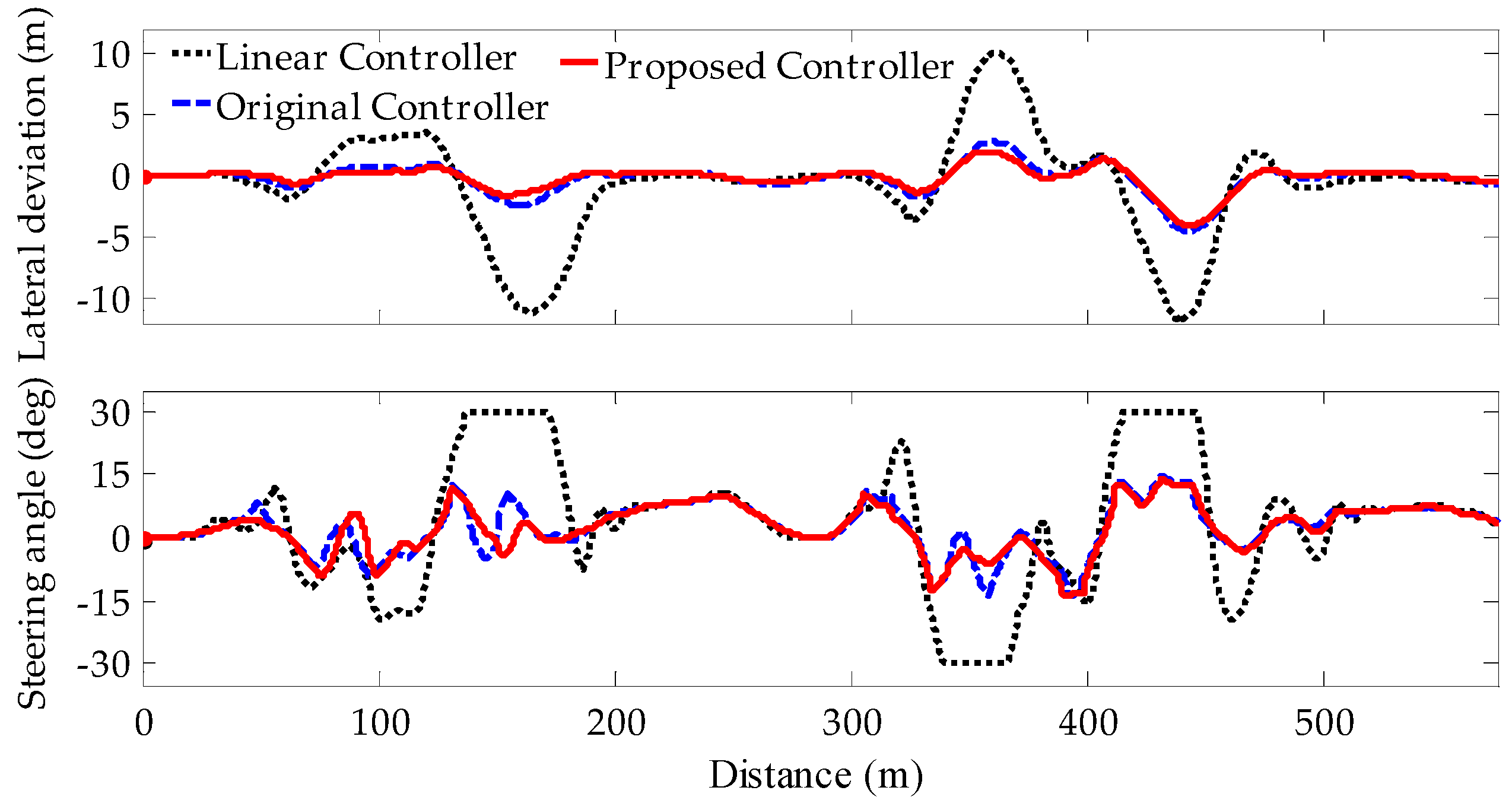
5.2. Controller Performance
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Sun, C.; Zhang, X.; Xi, L. Design of a lateral Control Strategy for High-Speed Intelligent Vehicle. In Proceedings of the SDEWES2017, Dubrovnik, Croatia, 4–8 October 2017. No. 0131. [Google Scholar]
- Li, A.; Zhao, W.; Wang, X. ACT-R Cognitive Model Based Trajectory Planning Method Study for Electric Vehicle’s Active Obstacle Avoidance System. Energies 2018, 11, 75. [Google Scholar] [CrossRef]
- Dixit, S.; Fallah, S.; Montanaro, U. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects. Annu. Rev. Control 2018, in press. [Google Scholar] [CrossRef]
- Amer, N.H.; Zamzuri, H.; Hudha, K. Modelling and Control Strategies in Path Tracking Control for Autonomous Ground Vehicles: A Review of State of the Art and Challenges. J. Intell. Robot. Syst. 2017, 86, 225–254. [Google Scholar] [CrossRef]
- Brown, M.; Funke, J.; Erlien, S.; Gerdes, J.C. Safe driving envelopes for path tracking in autonomous vehicles. Control Eng. Pract. 2017, 61, 307–316. [Google Scholar] [CrossRef]
- Kritayakirana, K.; Gerdes, J.C. Using the centre of percussion to design a steering controller for an autonomous race car. Veh. Syst. Dyn. 2012, 50, 33–51. [Google Scholar] [CrossRef]
- Erlien, S.M.; Funke, J.; Gerdes, J.C. Incorporating non-linear tire dynamics into a convex approach to shared steering control. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3468–3473. [Google Scholar]
- Talvala, K.L.R.; Kritayakirana, K.; Gerdes, J.C. Pushing the limits: From lanekeeping to autonomous racing. Annu. Rev. Control 2011, 35, 137–148. [Google Scholar] [CrossRef]
- Hu, C.; Jing, H.; Wang, R.; Yan, F. Robust H∞ output-feedback control for path following of autonomous ground vehicles. Mech. Syst. Signal Process. 2015, 70, 414–427. [Google Scholar]
- Kapania, N.R.; Gerdes, J.C. Path tracking of highly dynamic autonomous vehicle trajectories via iterative learning control. In Proceedings of the 2015 IEEE American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 2753–2758. [Google Scholar]
- Gray, A.; Gao, Y.; Hedrick, J.K.; Borrelli, F. Robust Predictive Control for semi-autonomous vehicles with an uncertain driver model. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium, Gold Coast, QLD, Australia, 23–26 June 2013; pp. 208–213. [Google Scholar]
- Katriniok, A.; Maschuw, J.P.; Christen, F.; Eckstein, L. Optimal vehicle dynamics control for combined longitudinal and lateral autonomous vehicle guidance. In Proceedings of the 2013 IEEE Control Conference, Zürich, Switzerland, 17–19 July 2013; pp. 974–979. [Google Scholar]
- Mammar, S.; Koenig, D. Vehicle Handling Improvement by Active Steering. Veh. Syst. Dyn. 2002, 38, 211–242. [Google Scholar] [CrossRef]
- Tagne, G.; Talj, R.; Charara, A. Design and Comparison of Robust Nonlinear Controllers for the Lateral Dynamics of Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 796–809. [Google Scholar] [CrossRef]
- Kapania, N.R.; Gerdes, J.C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling. Veh. Syst. Dyn. 2015, 53, 1687–1704. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design; Nob Hill Pub: San Francisc, CA, USA, 2009. [Google Scholar]
- Waschl, H. Optimization and Optimal Control in Automotive Systems; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Raffo, G.V.; Gomes, G.K.; Kelber, C.R. A predictive controller for autonomous vehicle path tracking. IEEE Trans. Intell. Transp. Syst. 2009, 10, 92–102. [Google Scholar] [CrossRef]
- Beal, C.E.; Gerdes, J.C. Model Predictive Control for Vehicle Stabilization at the Limits of Handling. IEEE Trans. Control Syst. Technol. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Ławryńczuk, M. Computationally efficient model predictive control algorithms. In A Neural Network Approach, Studies in Systems, Decision and Control; Janusz, K., Ed.; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Borrelli, F. MPC-based approach to active steering for autonomous vehicle systems. Int. J. Veh. Auton. Syst. 2005, 3, 265–291. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Tseng, H.E. Linear time-varying model predictive control and its application to active steering systems: Stability analysis and experimental validation. Int. J. Robust Nonlinear Control 2011, 21, 862–875. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Boston, MA, USA, 2011. [Google Scholar]
- Pacejka, H. Tire and Vehicle Dynamics; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Li, X.; Sun, Z.; Cao, D. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mech. Syst. Signal Process. 2017, 87, 118–137. [Google Scholar] [CrossRef]
- Kritayakirana, K.; Gerdes, J.C. Autonomous vehicle control at the limits of handling. Int. J. Veh. Auton. Syst. 2012, 10, 271–296. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Vehicle mass | m | 1230 | kg |
| Yaw inertia | Izz | 1343.1 | kg∙m2 |
| Front axle-O distance | a | 1.04 | m |
| Rear axle-O distance | b | 1.56 | m |
| Front cornering stiffness | 48,840 | N/rad | |
| Rear cornering stiffness | 32,887 | N/rad | |
| Friction coefficient | μ | 0.95 | n/a |
| Model | (m) | (m) | (m) |
|---|---|---|---|
| Linear Controller | 2.460 | 3.295 | 11.702 |
| Original Controller | 0.671 | 0.906 | 4.402 |
| Proposed Controller | 0.539 | 0.750 | 4.400 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Zhang, X.; Xi, L.; Tian, Y. Design of a Path-Tracking Steering Controller for Autonomous Vehicles. Energies 2018, 11, 1451. https://doi.org/10.3390/en11061451
Sun C, Zhang X, Xi L, Tian Y. Design of a Path-Tracking Steering Controller for Autonomous Vehicles. Energies. 2018; 11(6):1451. https://doi.org/10.3390/en11061451
Chicago/Turabian StyleSun, Chuanyang, Xin Zhang, Lihe Xi, and Ying Tian. 2018. "Design of a Path-Tracking Steering Controller for Autonomous Vehicles" Energies 11, no. 6: 1451. https://doi.org/10.3390/en11061451
APA StyleSun, C., Zhang, X., Xi, L., & Tian, Y. (2018). Design of a Path-Tracking Steering Controller for Autonomous Vehicles. Energies, 11(6), 1451. https://doi.org/10.3390/en11061451