Design of Electric Patrol UAVs Based on a Dual Antenna System

Abstract
:1. Introduction
2. Traditional UAV Positioning
3. Results
3.1. Dual Antenna System Theory
3.2. Experiments
4. Discussion
5. Conclusions
- (1)
- improving the security of dual antenna direction-finding and magnetic compass direction-finding; and
- (2)
- when the UAV accelerometer has problems, the dual antenna baseline solution can be used to calculate the roll and pitch angle of UAVs.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Melnichenko, M.M.; Osadchy, S.I. Trends of MEMS Technology in UAV Development. In Proceedings of the 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments, Kiev, Ukraine, 13–15 October 2015; pp. 66–68. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Z.; Sun, M.; Liu, Z.; Zhang, Q. ADRC Based Attitude Control of a Quad-rotor Robot. J. Harbin Inst. Technol. 2015, 337, 503–512. [Google Scholar] [CrossRef]
- Misra, D.; Bhattacharjee, S.; Goswami, B. Guaranteed Performance PID Controller for UAV Pitch Control. In Proceedings of the IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016; pp. 172–176. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, R.; Wang, G. Trajectory Tracking Control of a Small Unmanned Helicopter Based on Fuzzy CMAC-PID. In Proceedings of the 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015; pp. 5713–5717. [Google Scholar] [CrossRef]
- Wu, W.; Gao, L.; Zhou, S. Present Research and Development of FCS Design Methods. J. Nav. Aeronaut. Astronaut. Univ. 2010, 25, 421–426. [Google Scholar]
- Yi, J.; Zhang, X.; Ning, Z.; Huang, Q. Intelligent Robot Obstacle Avoidance System Based on Fuzzy Control. In Proceedings of the ICISE, Nanjing, China, 26–28 December 2009; pp. 3812–3815. [Google Scholar] [CrossRef]
- Ha, C.; Zuo, Z.; Choi, F.B. Passivity-based adaptive backstepping control of quadrotor-type UAVs. Robot. Auton. Syst. 2014, 62, 1305–1315. [Google Scholar] [CrossRef]
- Carrillo, L.R.G.; López, A.E.D.; Lozano, R.; Pégard, C. Modeling the quad-rotor mini-rotorcraft. In Quad Rotorcraft Control; Springer: London, UK, 2013; pp. 23–34. [Google Scholar]
- Ma, Z.; Hu, T.; Shen, L.; Kong, W.; Zhao, B.; Yao, K. An Iterative Learning Controller for Quadrotor UAV Path Following at a Constant Altitude. In Proceedings of the 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015; pp. 4406–4411. [Google Scholar] [CrossRef]
- Stowers, J.; Hayes, M.; Bainbridge-Smith, A. Altitude Control of a Quadrotor Helicopter Using Depth Map from Microsoft Kinect Sensor. In Proceedings of the 2011 IEEE International Conference on Mechatronics (ICM), Istanbul, Turkey, 13–15 April 2011; pp. 358–362. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. Robust Nonlinear Control for Path Tracking of a Quad-Rotor Helicopter. Asian J. Control 2015, 17, 142–156. [Google Scholar] [CrossRef]
- Jung, S.; Jeong, H. Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs. Energies 2017, 10, 1237. [Google Scholar] [CrossRef]
- Gross, J.; Gu, Y.; Rhudy, M. Fixed-Wing UAV Attitude Estimation Using Single Antenna GPS Signal Strength Measurements. Aerospace 2016, 3, 14. [Google Scholar] [CrossRef]
- Heredia, G.; Caballero, F.; Maza, I.; Merino, L.; Viguria, A.; Ollero, A. Multi-Unmanned Aerial Vehicle (UAV) Cooperative Fault Detection Employing Differential Global Positioning (DGPS), Inertial and Vision Sensors. Sensors 2009, 9, 7566–7579. [Google Scholar] [CrossRef] [PubMed]
- Vetrella, A.R.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and Vision-Based Tracking to Improve Navigation Performance in Cooperative Multi-UAV Systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Condition | Expected Value | Maximum Calculation | Minimum Calculation | Amplitude of Fluctuation |
|---|---|---|---|---|
| Test condition 1 | 135.68° | 136.1° | 135.3° | 0.8° |
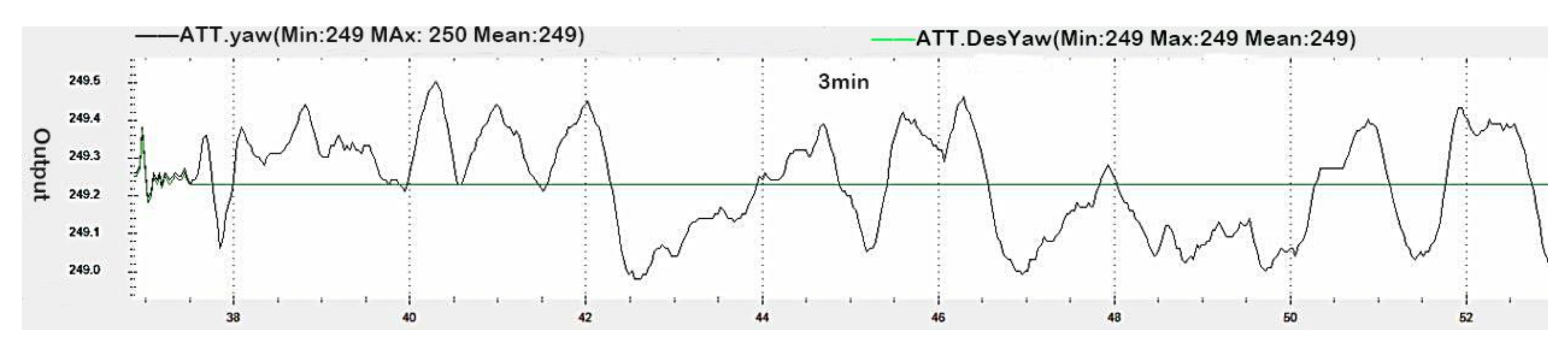
| Test condition 2 | 249.23° | 249.5° | 249° | 0.5° |
| Test condition 3 | 154.2° | 166° | 154.3° | 5.7° |
| Test condition 4 | 238.9° | 240.02° | 239.72 | 0.3° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, Y.; Zhao, H.; Zhao, M.; Jiao, S. Design of Electric Patrol UAVs Based on a Dual Antenna System. Energies 2018, 11, 866. https://doi.org/10.3390/en11040866
Zhai Y, Zhao H, Zhao M, Jiao S. Design of Electric Patrol UAVs Based on a Dual Antenna System. Energies. 2018; 11(4):866. https://doi.org/10.3390/en11040866
Chicago/Turabian StyleZhai, Yongjie, Hailong Zhao, Meng Zhao, and Songming Jiao. 2018. "Design of Electric Patrol UAVs Based on a Dual Antenna System" Energies 11, no. 4: 866. https://doi.org/10.3390/en11040866
APA StyleZhai, Y., Zhao, H., Zhao, M., & Jiao, S. (2018). Design of Electric Patrol UAVs Based on a Dual Antenna System. Energies, 11(4), 866. https://doi.org/10.3390/en11040866