1. Introduction
Voltage source converter (VSC)-based high voltage direct current (HVDC) technology has become a focus for scholars all over the world, because the technology has the advantages of controlling active and reactive power independently, reversing power flow without changing voltage polarity, supplying power for passive networks, etc. [
1,
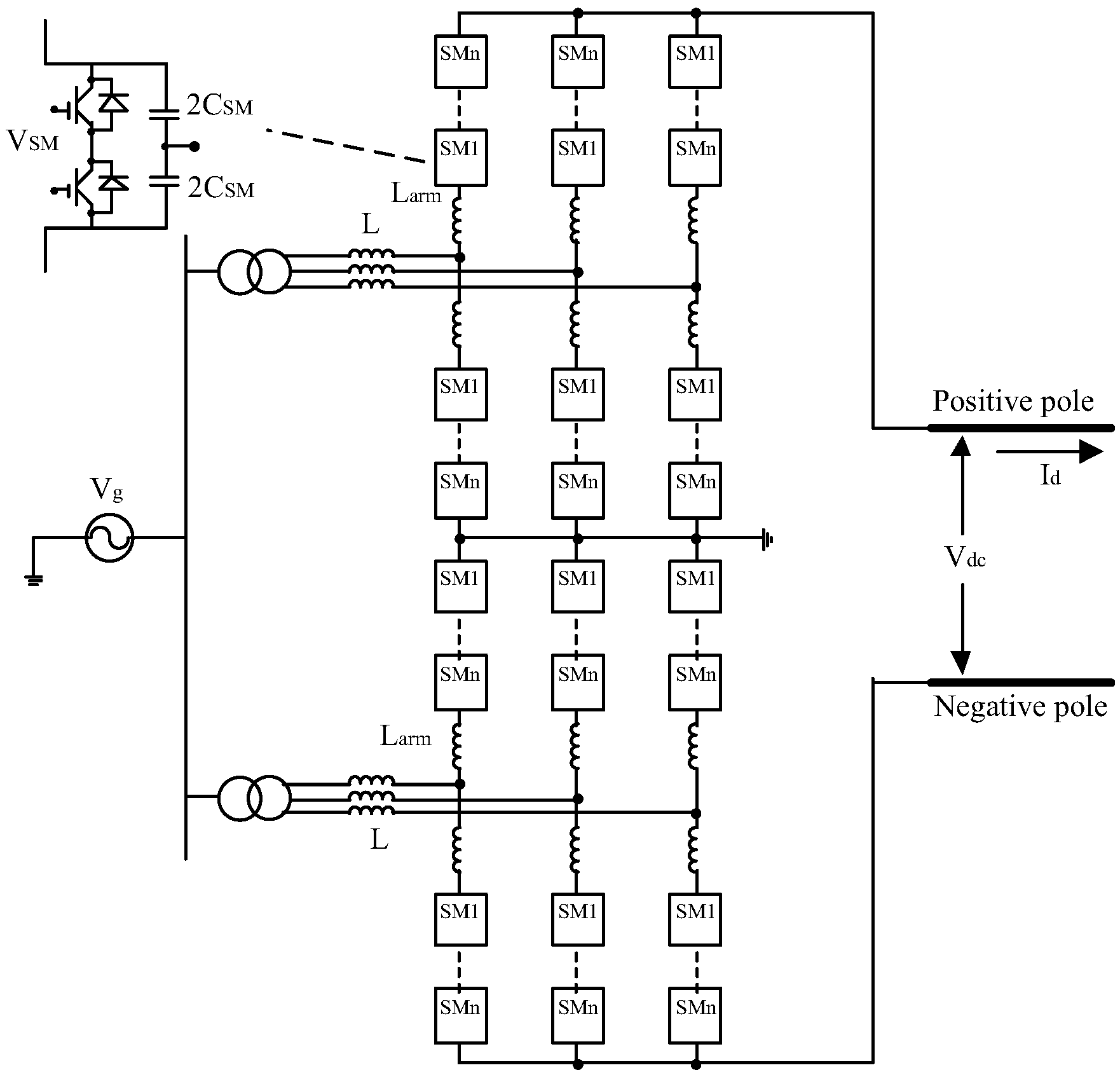
2]. The main topologies of VSC include two-level and three-level VSC and modular multilevel converter (MMC). Since MMC has the advantages of higher quality of output waveform, lower switching frequency and power loss and higher reliability, it has been regarded as an excellent choice for bulk power transmission, especially for multi-terminal direct current (MTDC) grid.
At present, the VSC-HVDC projects that have been put into operation mainly include point-to-point and multi-terminal transmission projects, such as Gotland point-to-point two-level VSC-based HVDC project, Nan’ao three-terminal and Zhoushan five-terminal MMC-based DC transmission projects [
3,
4], but they all do not form a DC grid. Zhangbei MMC-based HVDC project will build China’s first VSC-based HVDC grid, which is still in the preparatory stage [
5].
Compared with MTDC transmission project, the biggest advantage of MTDC grid is that there are multiple transmission lines between converter stations to form mesh structures and increase system redundancy, which significantly improves power supply reliability, decreases the number of converter stations and reduces investment and operation costs [
6,
7]. However, due to the use of long-distance lines for power transmission, the MTDC power grid is fault-prone, and the failure of any line may cause the electrical quantities of all lines to be influenced. In addition, due to varied topography and long distance, after the occurrence of a line fault, artificial line patrol is difficult to find the fault point, which results in greatly delay of the fault recovery time. In order to relief the burden of patrol personnel, shorten the fault recovery time and reduce the revenue losses due to power outage, choosing reliable algorithms of fault location has important theoretical significance and engineering application value.
The fault location methods of high-voltage alternating current (HVAC) power networks are by far relatively mature, and mainly include two categories [
8,
9,
10,
11]: impedance-measurement method and traveling-wave-based method. In the former method, postfault voltages and currents of HVAC systems within the first several milliseconds are used to calculate the impedance to pinpoint the exact fault location. However, for MMC-HVDC systems, the impedance calculation may not be easy, due to the low-inertia characteristics and the application of fast-acting protection devices. Compared to the impedance-measurement method, as a result of merely utilizing the fault-generated surge, a shorter data window is required in the traveling-wave method. Furthermore, the amplitude and polarity of the traveling wave will not be affected by the fault inception instant in DC systems, which is different from AC systems. Therefore, the traveling-wave-based method is very suitable for DC systems, hence, the proposed method is based on the traveling-wave principle.
The fault location method based on the distributed parameter model proposed in [
12] has a good applicability to the two-terminal MMC-HVDC transmission line, and the accuracy of fault location is high, but it is difficult to extend to the multi-terminal MMC-based MTDC grid. In [
13,
14], two fault location methods based on natural frequency of the traveling wave are presented. Although the two methods avoid the identification of the traveling wave front, there are problems such that the equivalent impedance of the measuring terminal is difficult to obtain accurately and the faulty branch of the multi-terminal system is difficult to select. In [
15], a one-terminal fault location method based on parameter identification principle is proposed, but this method is just applicable to the case where there are large capacitors in parallel at both ends of the transmission line. In [
16], a fault location method combining wavelet transform (WT) with artificial neural network (ANN) algorithm is proposed. This method needs to set up many parameters for training neural network, and it takes a long time to learn to achieve sufficient location accuracy. A fault location method for multi-terminal VSC-HVDC system is proposed in [
17]. In [
18], a protection method based on wavelet modulus maxima of traveling waves is proposed for the point-to-point HVDC system. The method leads to a fast and reliable solution for the protection of HVDC lines. Besides, it is able to figure out the exact fault location. The method uses both voltage and current measurements obtained at the converter stations to identify the faulty line for protection purposes. However, it cannot figure out the exact fault location. So far, there are few fault location methods for multi-terminal MMC-HVDC grids reported in the literature.
In this paper, a precise fault location scheme is introduced. The scheme utilizes the characteristics of the first arrival current traveling wave (FACTW), which are extracted and quantified by CWT, to realize fault location. Although this scheme is initially derived from a meshed three-terminal DC grid, it can be extended to a MMC-MTDC grid with any number of meshes.
The remainder of paper is arranged as follows. The fault characteristic analysis is performed in
Section 2. According to the conclusions of
Section 2,
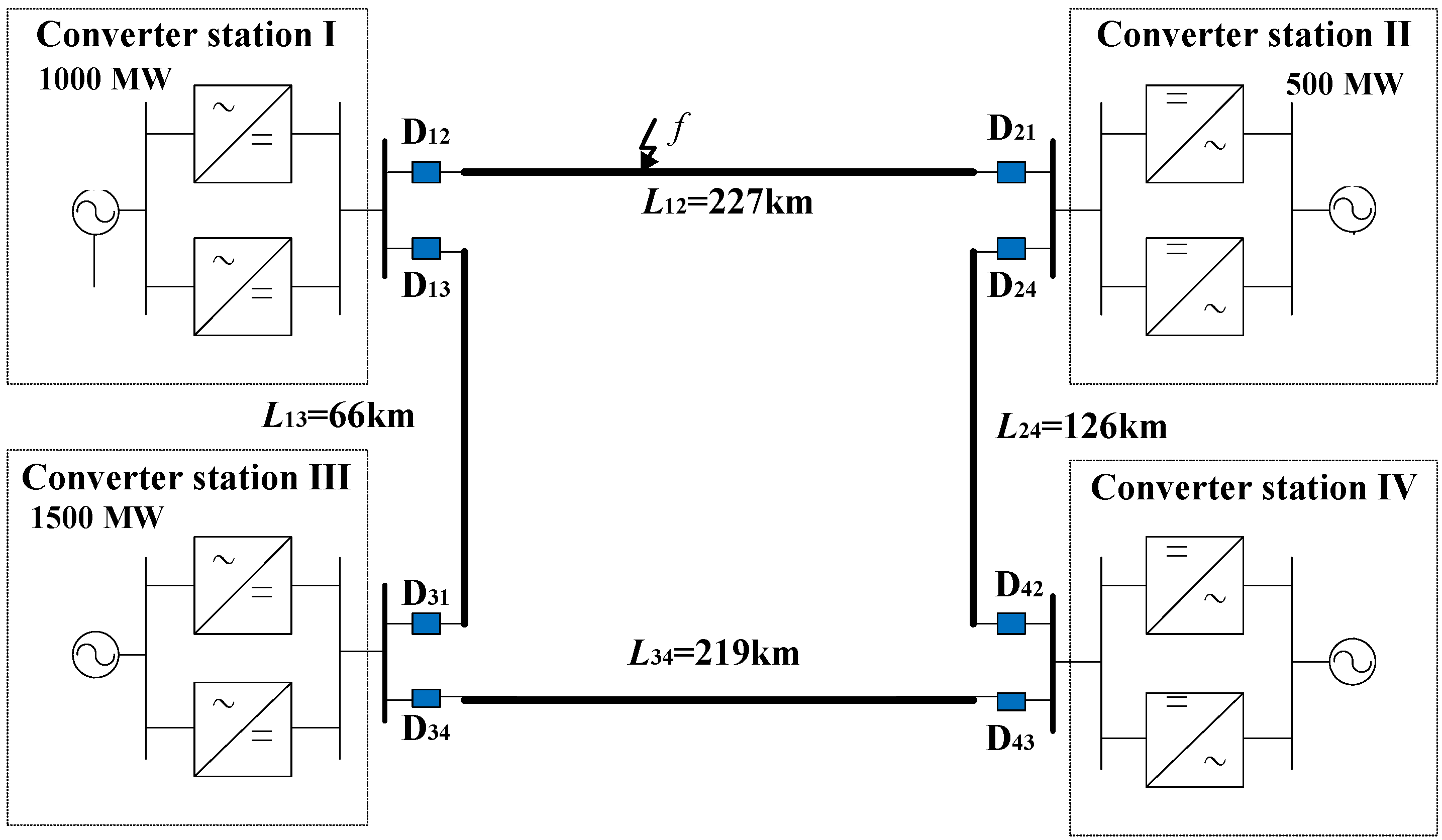
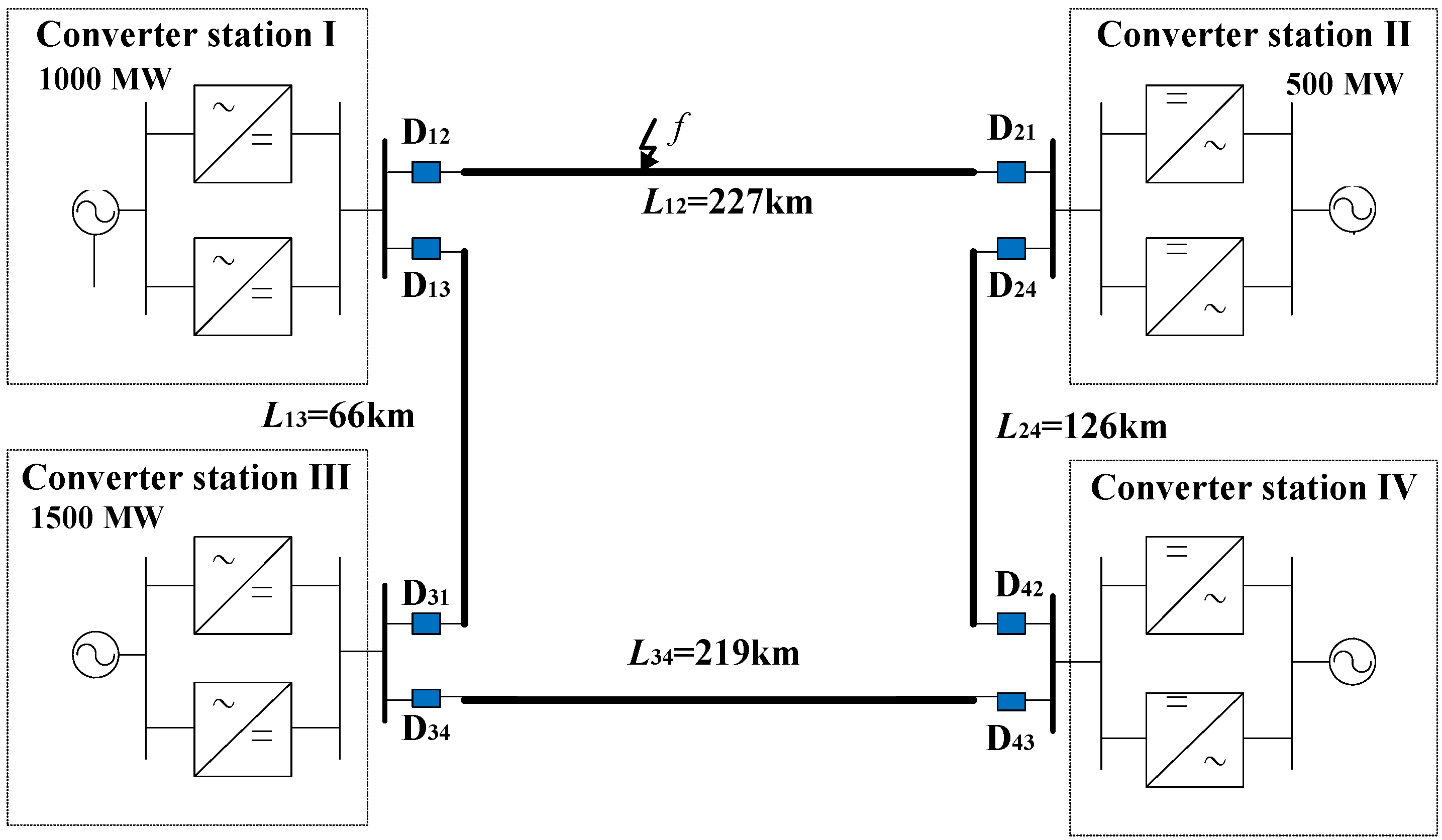
Section 3 constructs the faulty pole identification criterion and faulty segment determination criterion, respectively, and, proposes the fault location algorithm. Based on the design parameters of Zhangbei ±500 kV four-terminal MMC-HVDC power grid in China, a simulation model was constructed to verify reliability and accuracy of the proposed fault-location scheme in
Section 4 and the conclusions was drawn in
Section 5.
3. Fault Location Scheme
3.1. Fault-Pole Identification Criterion
On the basis of the characteristic analysis in
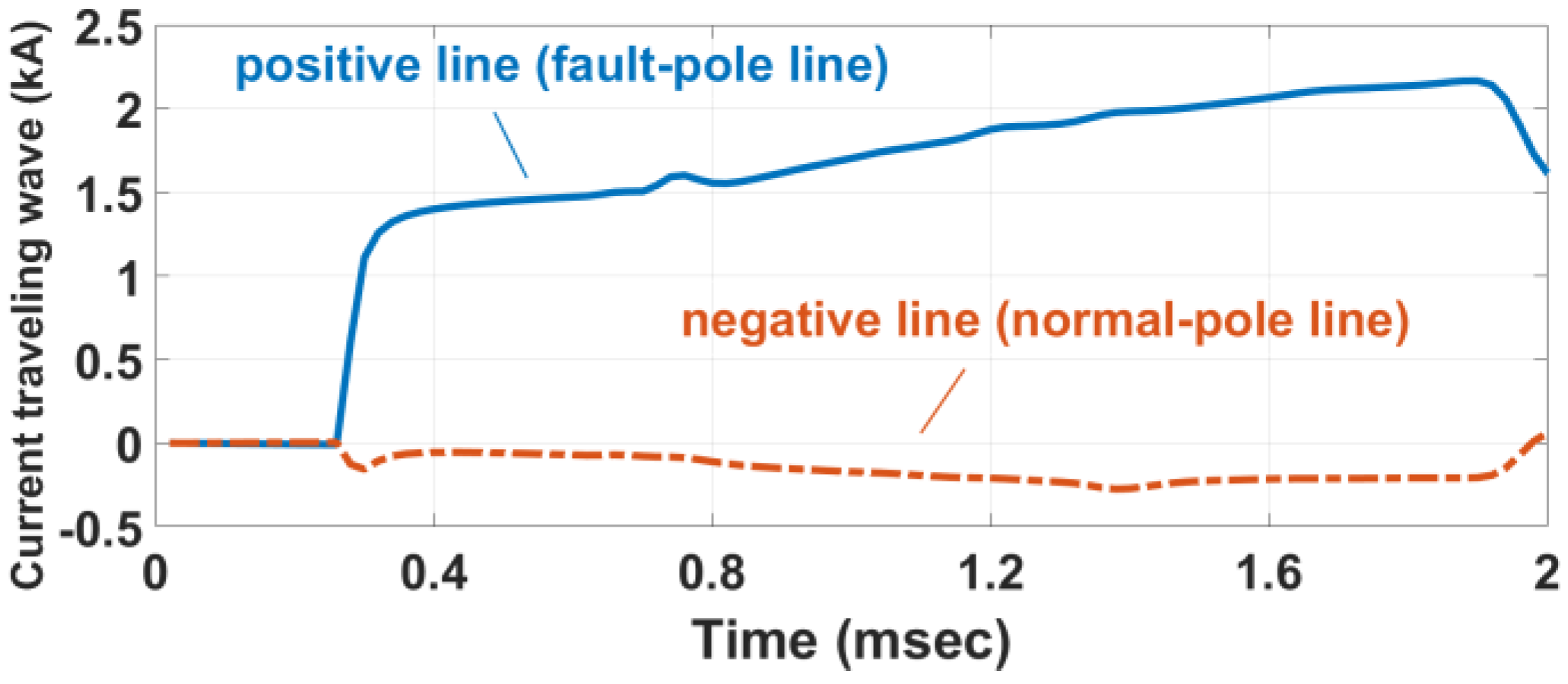
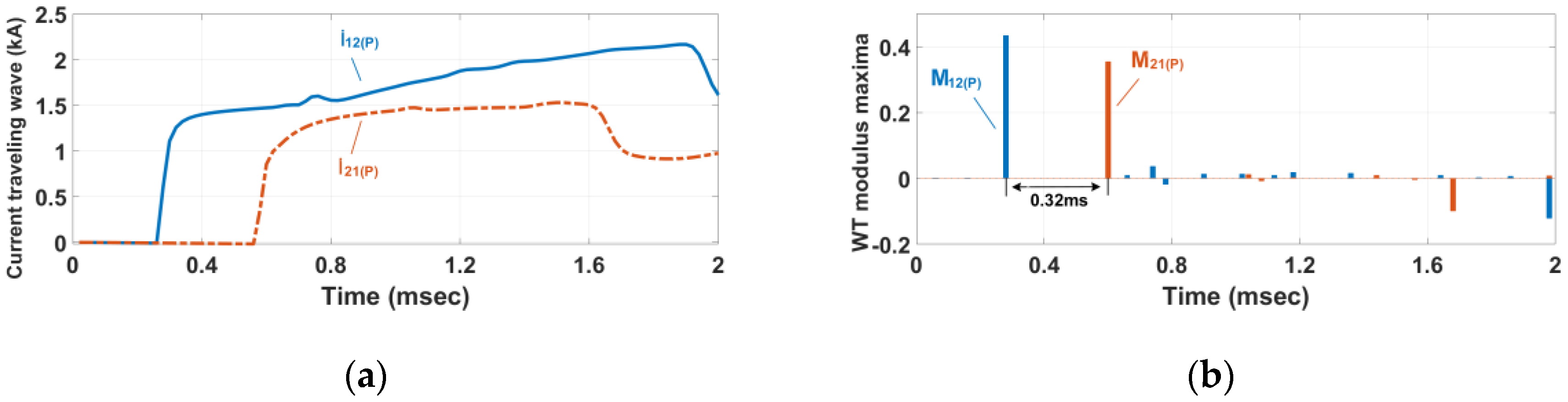
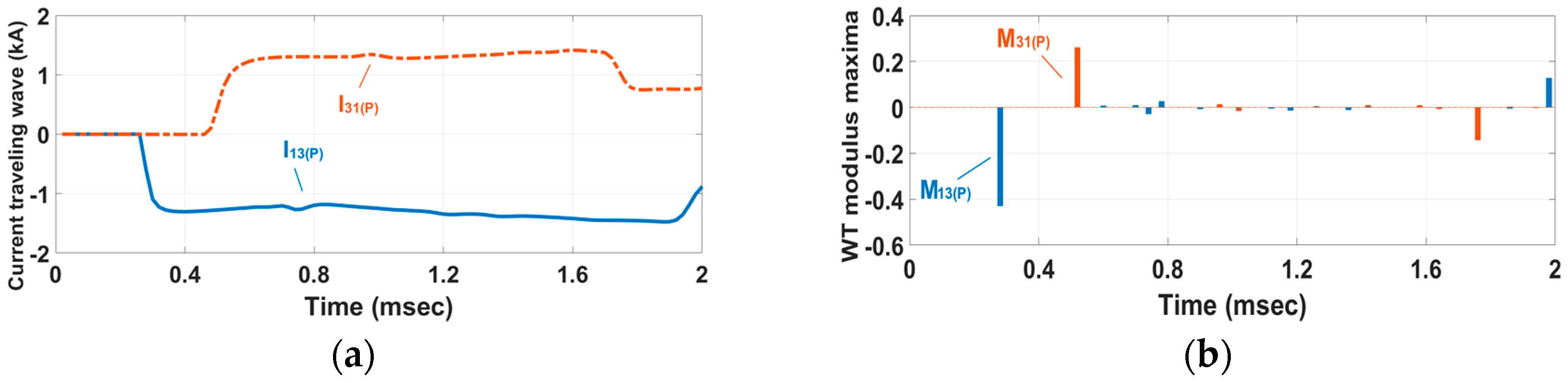
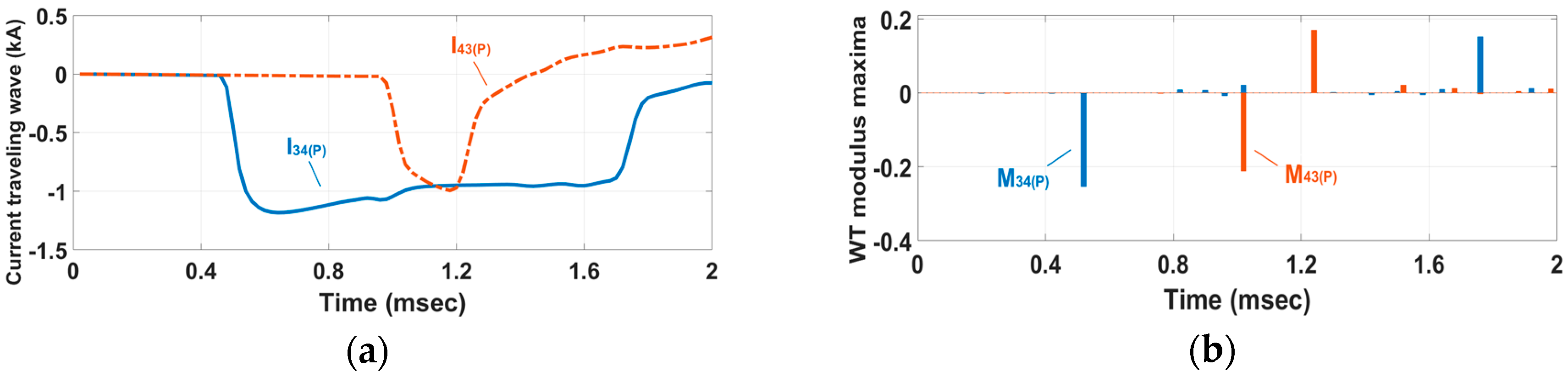
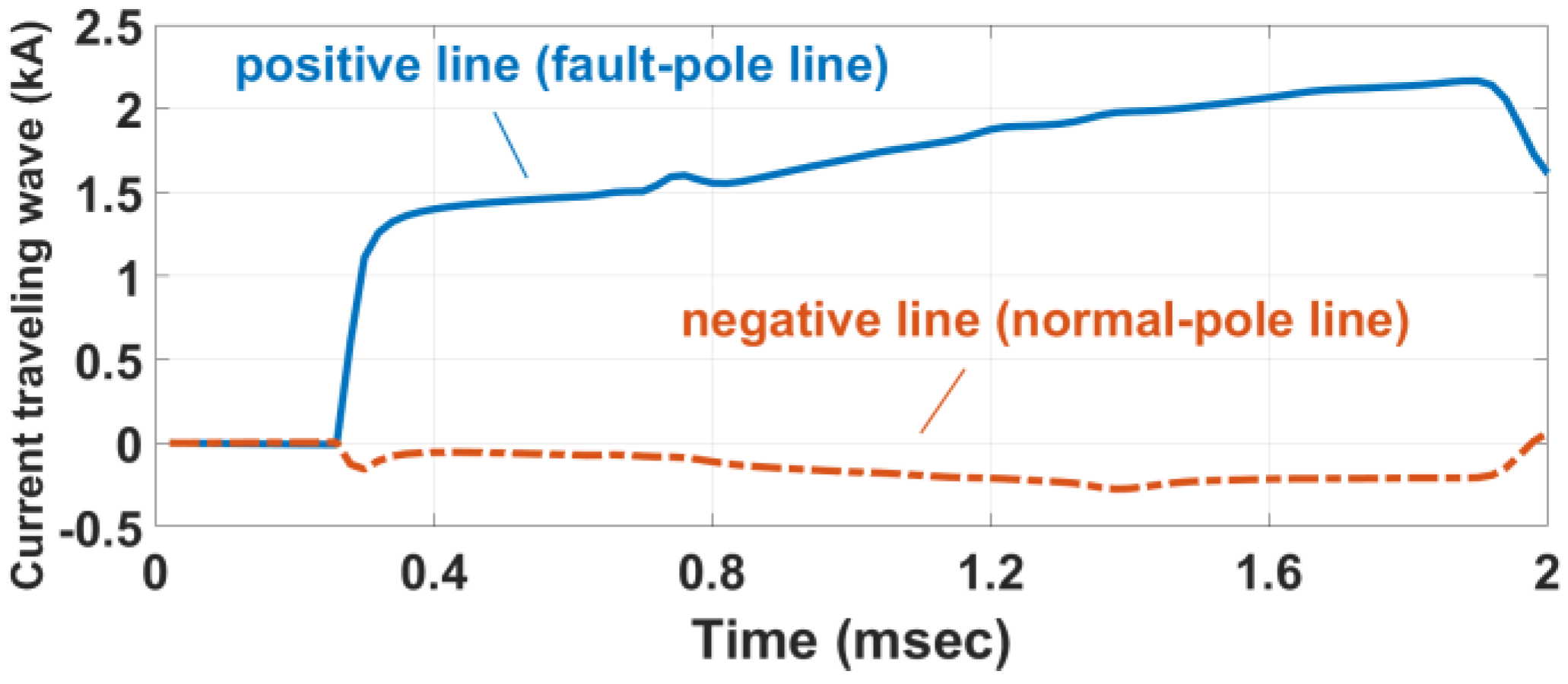
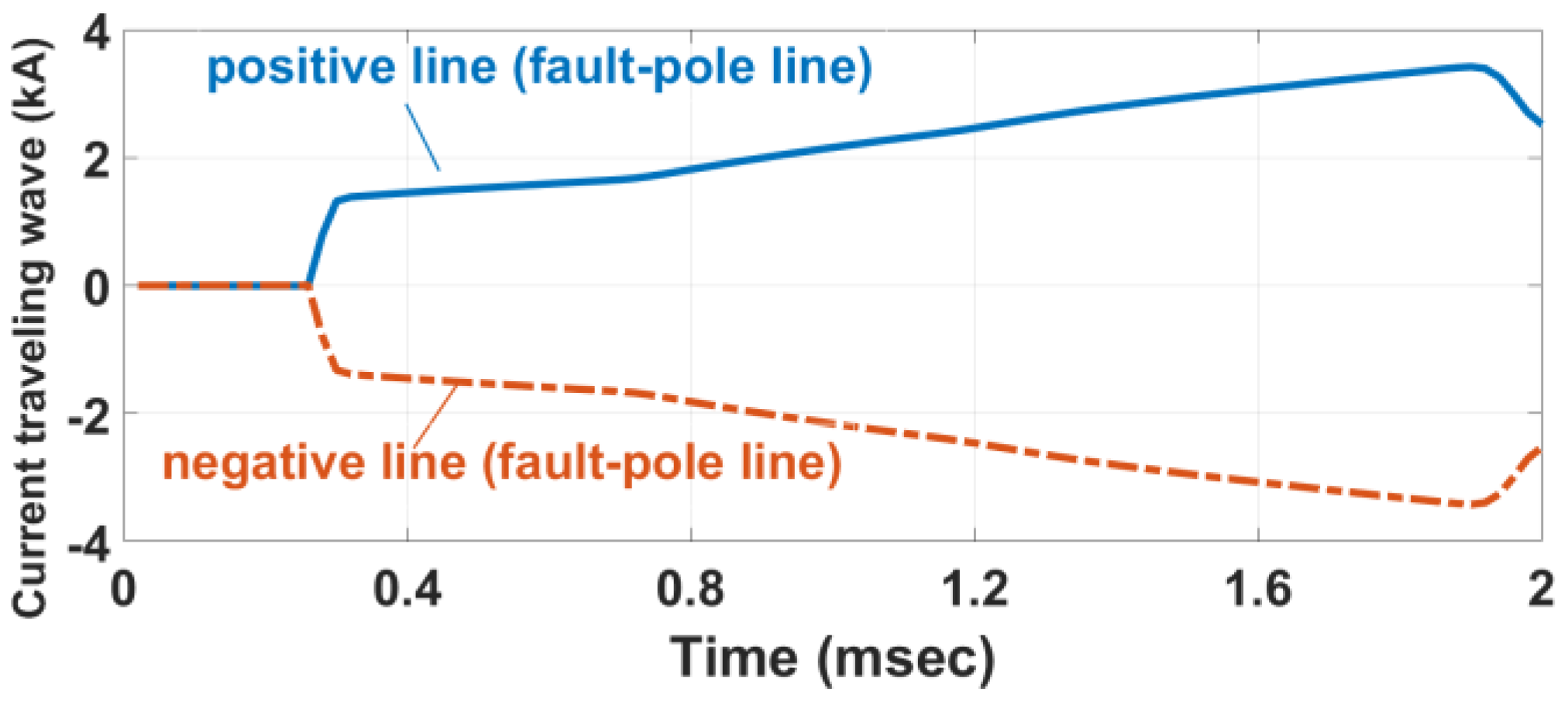
Section 2.2.3, the identification of faulty pole can be achieved by comparing the amplitude of FACTWs at the same terminals of each segment. According to the wavelet analysis theory in
Section 2.1, the amplitude of FACTW can be approximately represented by the CWT modulus maximum.
First, the following ratio is defined for convenience:
where
Mij(P) and
Mij(N) respectively denote the WT modulus maxima of the positive line and the negative line at
i-terminal of the segment
ij.
Then the fault-pole identification criterion can be constructed as follows:
where
k (0 <
k < 1) denotes the reliable coefficient.
If (5) is satisfied, the positive pole is identified as the faulty pole; If (6) is met, the negative pole is identified as the faulty pole; If (7) is satisfied, the bipolar short-circuit fault is determined.
In order to ensure the reliability of the criterion and to avoid the frequent start of the fault-location device caused by noises, the validity of data used for the algorithm is needed to be verified. The verification criterion of data validation is as follows:
The value of the threshold
Iset is defined as
where Δ
Ii is the fault component current at
ith sampling point. Ii denotes the instantaneous value of current at
ith sampling point;
Krel denotes the reliable coefficient, whose value is 0.1 in this paper to avoid the influence of noises, and
IN denotes the rated current of each line; and the fault-location device starts if (10) is met for three consecutive samples.
3.2. Fault-Segment Determination Criterion
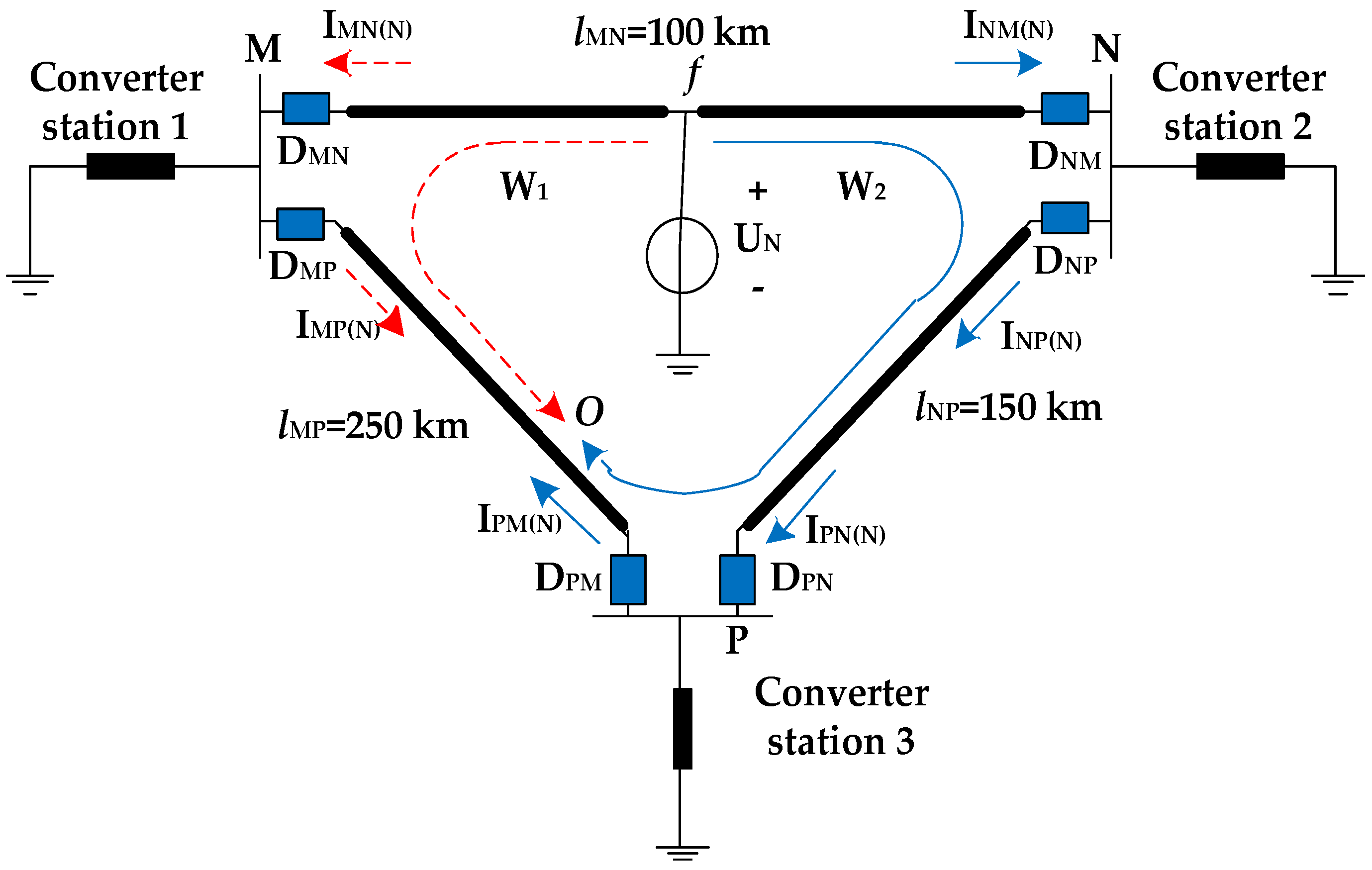
For the MMC-MTDC grid, after identifying the faulty pole, it is necessary to select the faulty segment correctly so as to calculate the fault distance accurately.
Based on the analysis in
Section 2.2.1 and
Section 2.2.2, the following faulty segment determination criterion can be constructed by using WT modulus maxima:
where
Mji(P) and
Mji(N) denote the WT modulus maxima of the positive and the negative line at
j-terminal of the segment
ij, respectively.
If the faulty pole is identified as positive pole, meanwhile (11) is met, the segment ij is determined as the faulted segment, otherwise the segment ij is verified as the non-fault segment; If negative pole is the faulty pole, and (12) is satisfied, the segment ij is judged as the faulted segment, otherwise the segment ij is healthy; For the bipolar short-circuit fault, in order to simplify calculation, the segment ij is selected as the faulted segment only need to satisfy (11).
3.3. Fault-Distance Calculation
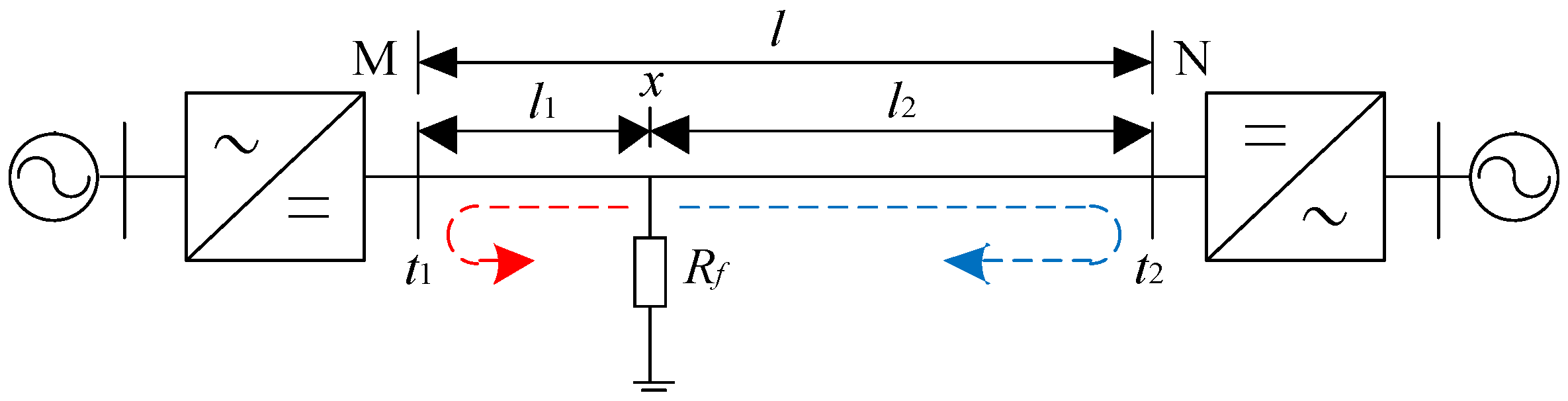
Once the faulted segment is determined, the fault distance will be further calculated. According to the traveling-wave principle, after a fault occurring on the transmission line, the initial current traveling waves propagate from the fault point to both terminals, and reflection and refraction occurs at the discontinuity of the wave impedance. As parameters of each DC transmission line are uniform, the propagation velocity of traveling wave is constant for each line.
Figure 7 shows a schematic diagram of fault-generated traveling waves propagating in a two-terminal MMC-HVDC system where the length of the transmission line MN is
l km and the transition resistance is
Rf. The fault point is at
x, and the distances from the fault point
x to terminals
M and
N are
l1 km and
l2 km, respectively. Suppose that both terminals are equipped with measurement units, which have the ability to collect signals synchronously. Thus, the first surge arrival times at terminals
M and
N can be obtained using WT, which are denoted by
t1 and
t2. The fault distance can be calculated as follows:
where
v denotes the propagation velocity of traveling wave, and Δ
t is the time difference of the first arrival traveling waves at both ends of the line.
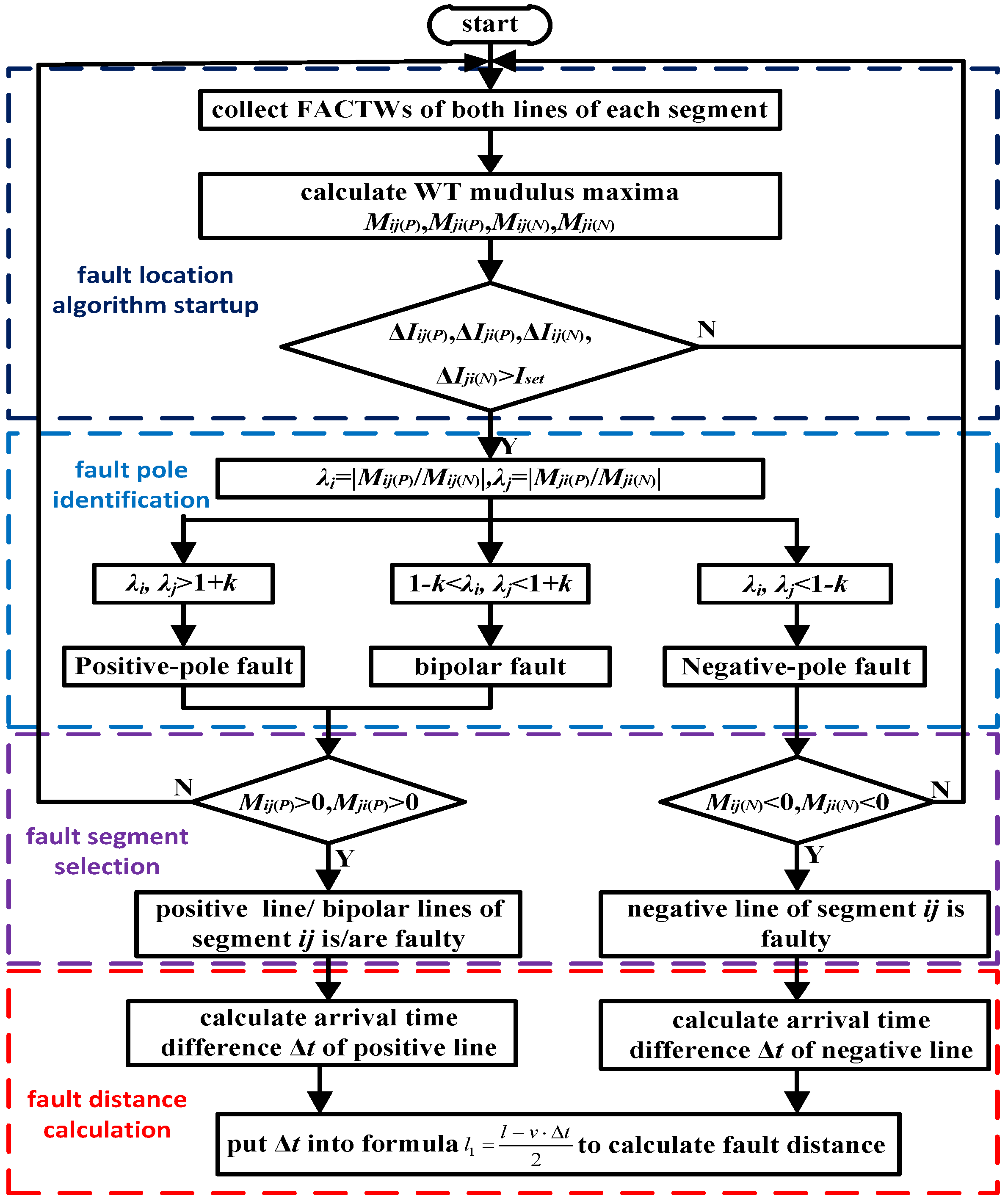
3.4. Flowchart of the Proposed Fault-Location Scheme
The flowchart of the fault-location scheme is illustrated in
Figure 8. In practical applications, due to the current-limiting reactor and other primary-side equipment on both terminals of the DC line, the traveling wave signal will attenuate greatly. The amplitude of FACTW detected by the location device of the segment far from the fault point may be so small that the value of Δ
Ii is less than
Iset. In the case mentioned above, the segment would be considered as a non-fault segment.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}