To model the WECs with a given PTO system, in this investigation we use the open source mechanical solver WEC-Sim developed by Sandia National Laboratory in collaboration with the National Renewable Energy Laboratory (NREL) in the US [
6]. WEC-Sim operates within the MATLAB Simulink environment. For 1 DoF WEC displaced a distance
z from equilibrium, WEC-Sim solves for the WEC motion in the time domain using the Cummins Equation (
6):
In the case of a floating WEC oscillating in heave,
where M is the generalized mass matrix and
is the asymptotic value of the heave added mass. On the right hand side,
is the excitation force,
is the PTO force,
is the hydrostatic force,
is the force vector of radiation,
are the forces that can be modelled as viscous or friction losses in the system, and
is the force vectors resulting from the mooring connections. The excitation force is calculated as
, where
is the Fourier transform of the surface elevation and
is the frequency domain exciting force transfer function.
is the hydrostatic force which is equal to
where
represents the hydrostatic stiffness and
the frequency domain displacement of the heaving cylindrical WEC. The hydrodynamic coefficients representing
A, the added mass of the device,
B, the hydrodynamic damping and
K, the hydrodynamic spring or stiffness, are calculated in the frequency domain in NEMOH for each relevant degree of freedom for the given WECtype. Please note that henceforth all capital letters represent frequency domain complex quantities while small case letter real-valued time-domain quantities. For the regular waves simulated herein, the radiation force
can be calculated in the steady state form for a given frequency
by the following Equation (
7):
In this paper, we do not model
and
since they are assumed to be negligible, therefore those terms are set equal to zero. The OSWEC described in
Section 4.1 is simulated using the same Equation (
6), with the substitution of torques for the forces and the pitch angular displacement
for the heave displacement
and the coefficients in heave for the coefficients in pitch. Two different types of power take-off systems will be further discussed: a linear and hydraulic PTO system, the former being the most popular way of simplifying a PTO system while the latter being one of the most used PTO systems in commercial WEC designs.
3.1.1. Linear PTO System
The most common way of simulating the effect of the PTO system of a wave energy converter is by modelling its dynamics as linear. This means the PTO system is modelled as a spring-damper-mass system with stiffness coefficient
and damping coefficient
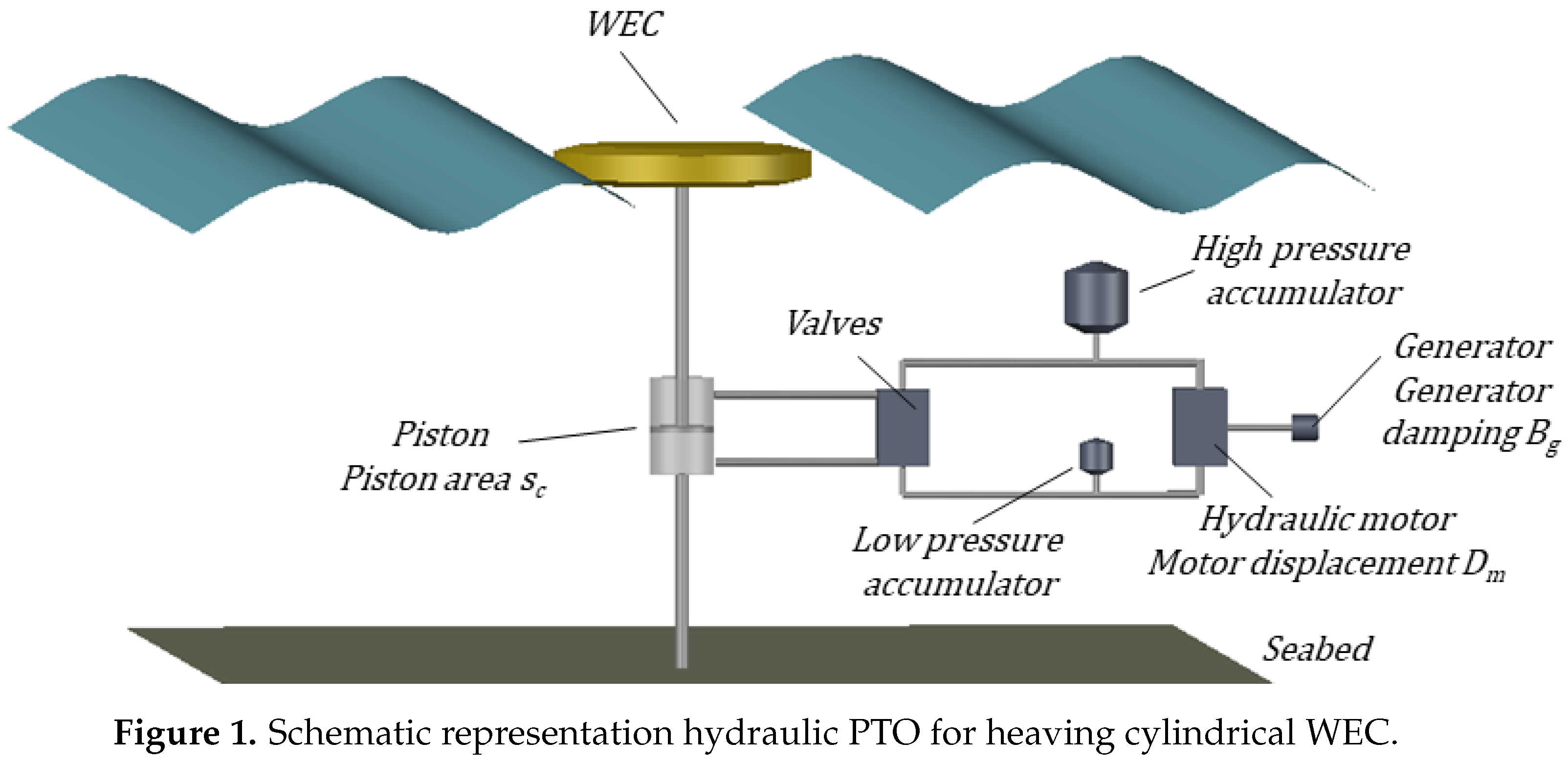
. However, because of the practical difficulty of changing the mass of the PTO system in real-time, it is often assumed the mass is unchangeable, resulting in the spring-damper system as represented in
Figure 1 for the heaving cylindrical WEC. For practical reasons, a variable spring system is often difficult to implement, therefore a further simplification is warranted where we set the stiffness coefficient
to zero. In the following calculations, the PTO system will be modelled as linear damper, resulting in the following expression for the PTO force:
with
the linear PTO damping term. The linear PTO influences the dynamics of the heaving cylindrical WEC: it exerts a force,
, oppositely directed to the WEC’s velocity,
. The instantaneous power
absorbed by the linear PTO system is calculated as:
When assuming that the waves are sinusoidal the motion of the WEC can be expressed as the real part of a complex value:
, where from this point capital letters will represent the complex form of a certain quantity. The average power
absorbed by a heaving cylindrical WEC with a linear PTO system in one wave period is given as
The expression above is used to find the optimum value for
resulting in the maximum average absorbed power
P. This leads to
with
m the WEC’s mass,
the added mass in heave,
the heave component of the hydrodynamic damping and
the hydrostatic stiffness in heave. The same procedure can be repeated for the OSWEC with a linear PTO system: the PTO-torque
is calculated as follows:
with
the linear damping coefficient in [Nm/(rad/s)] for the OSWEC and
the pitch velocity of the OSWEC [rad/s]. The optimal value for
, resulting in the maximum average absorbed power, is given by
Here,
I represents the OSWEC’s moment of inertia about its hinge,
represents the added moment of inertia in pitch,
the pitch component of the hydrodynamic damping and
the flap buoyancy torque. The average absorbed power by an OSWEC with a linear PTO system is then expressed as:
with
the amplitude of the pitch motion.
3.1.2. Hydraulic PTO System
Although the linear damper is a convenient way of modelling the effects of the PTO system, it is in some cases an oversimplified representation of the realistic PTO system. Realistic full scale WECs are often equipped with a hydraulic PTO system, which can be modelled numerically using WEC-Sim for both a heaving cylindrical WEC and an OSWEC. A schematic representation of a heaving cylindrical WEC equipped with a hydraulic PTO system is given in
Figure 1.
In the case of a heaving cylindrical WEC, the hydraulic PTO system converts the heaving motion in a pressurized fluid flow. This fluid flow is translated in rotational energy by the variable displacement motor. The motor’s axle is connected to a generator’s axle, which generates electricity [
20]. The provided model calculates the hydraulic PTO force,
with:
with
and
respectively the pressure in the high- and low-pressure accumulator, whereas
represents the piston area. Accumulators smoothen the peak flows into a quasi-constant flow towards the hydraulic motor [
33]. The PTO-force exerted by the hydraulic PTO system always has the opposite sign as the velocity of the heaving cylindrical WEC. The volume flow
, resulting from the up- or downward piston movement is given by:
Rectifying valves ensure unidirectional flow further in the hydraulic system. This makes fluid flow from the piston into the high-pressure accumulator and then further to the hydraulic motor. Fluid leaving the hydraulic motor flows towards the low-pressure accumulator. The incoming volume flow in the high-pressure accumulator,
, is calculated as:
with
originating from the hydraulic motor - see Equation (
20). The total fluid volume inside the accumulator at time
equals
and is calculated with:
It is assumed that initially there is no fluid inside the accumulator, so
equals 0. The total volume of the accumulator equals
, which allows the calculation of the pressure inside the accumulator as follows, according to an isentropic process:
with
the initial pre-charge pressure in the accumulator and
the adiabatic index, set equal to 1.4. The compressibility of the fluid is neglected. The calculation of the pressure in the low-pressure accumulator,
, is done similarly. The fluid volume flow originating from the motor is determined by:
In this formula,
represents the angular velocity of the hydraulic motor, whereas
represents the swashplate angle which is the instantaneous motor displacement divided by the maximum motor displacement.
represents the nominal motor displacement. The product
represents the volume needed for one revolution of the hydraulic motor, expressed in [m
/rad]. In MATLAB Simulink, the angular velocity of the hydraulic motor,
, is calculated by integrating the following expression:
where
is the generator torque,
the torque due to friction, and
the total mass moment of inertia of the motor/generator. The generator torque changes linearly with the motor’s angular velocity,
, with a damping coefficient of the generator,
:
It is assumed that this damping coefficient
is constant. The efficiency of the generator depends on its torque
and its angular velocity
. A table for the generator efficiency is provided by WEC-Sim for different combinations of
and
. The average absorbed power by the hydraulic PTO of a heaving cylindrical WEC over one wave period
T is expressed as:
The Equation (
23) is the absorbed power without taking into account losses in the hydraulic motor and electric generator. The average electrical power will be less than the power at the piston,
, since friction in the hydraulic motor and the efficiency of the generator are taken into account in WEC-Sim. In
Section 4.4 and further, only the average absorbed power at the piston
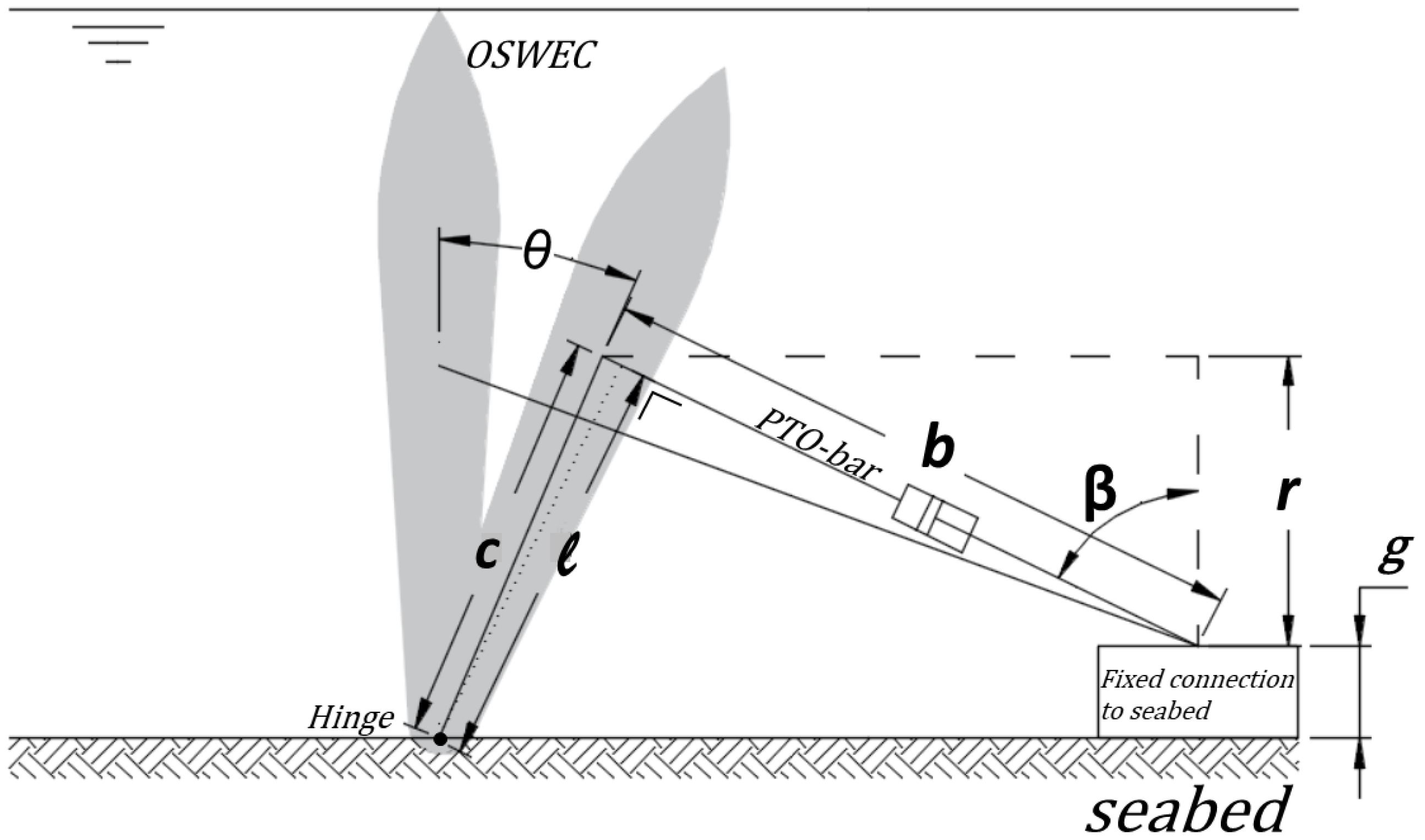
will be considered. WEC-Sim also provides the ability to implement a hydraulic PTO system for an OSWEC. The principle of a hydraulic PTO system applied to a pitching flap is sketched in
Figure 2. In
Figure 2, a positive pitching angle
corresponds to a clockwise movement of the flap, which implies a shortening of the PTO-bar equipped with the PTO system. This shortening in its turn creates a pressure difference on both sides of the piston. The pitching motion thus induces a linear movement in the piston. Once this linear motion is calculated in Simulink, the force
can be calculated and will be multiplied with the lever arm length
ℓ around the hinge to find the torque
:
How the force
is calculated is explained in
Section 3.1.2, in Equation (
15), since the hydraulic PTO system for the OSWEC mainly contains the same components as the one for the heaving cylindrical WEC. How the pitching motion of the flap is converted in a linear movement of the piston is briefly explained below. This conversion involves some geometric parameters—see
Figure 2 for definitions:
, the varying pitch angle
g, the offset height of the PTO-bar connection with the seabed
c, the distance between the flap-hinge and connection with the PTO-bar
, the length of the PTO-bar, varying in time; for ,
, the vertical distance between the connection points of the PTO-bar, varying in time
, the angle between the PTO-bar and the vertical direction, varying in time
, the length of the lever arm (or the distance of the hinge to the PTO-bar), variable in time.
In
Figure 2 the length
r varies in time and is evaluated by
, while angle
can be calculated as
. The length of the lever arm
ℓ, i.e., the perpendicular distance from the PTO-bar to the hinge can be determined using:
The instantaneous absorbed power can be either determined by multiplying
with the angular velocity
or by multiplying
with the linear velocity of the piston at each time step, as in Equation (
23). As with the heaving cylindrical WEC, only the total absorbed power
at the piston will be considered. The average absorbed power by the hydraulic PTO system of an OSWEC over one wave period is expressed as:





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}