1. Introduction
With the emergence of enormous amounts of plug-in hybrid electric vehicles (PHEVs) and electric vehicles (EVs) and the flourishing of renewable energy, the development of power storage has become an interesting topic. Therefore, the technology related to battery charging has drawn a lot of attention from governments, auto-makers, and researchers. In order to answer the demands for fast and efficient battery chargers, many control strategies have been proposed.
Classical Proportional Integral (PI) control has been proposed for single-phase chargers [
1,
2]. The charging scheme was designed based on constant-current (CC) and constant-voltage (CV) charging mode which provides shorter charging times compare to those of fixed voltage charging methods. However, the main drawback of PI controllers is gain tuning for both inner-loop and outer-loop controller. Furthermore, since the topology of these proposed methods is based on single-phase converters, the charging current limit is smaller compared to those of three-phase chargers.
Model predictive control (MPC) has been proposed in [
3] for a bidirectional three-phase charger. This method could provide bidirectional power transfer with instantaneous mode charging capability and fast dynamic response. Even so, the charging method from power grid to vehicle is based on fixed voltage mode therefore the batteries need a longer time to be fully charged. In [
4], another MPC-based control has also been proposed for a three-phase charger to charge Li-ion batteries. The controller outputs the optimum pulse width modulation (PWM) switching signal to provide the nearest output reference with fast convergence rate to the equilibrium point whose power factor is unity. However, this method requires a DC/DC converter to maintain the CC/CV charging stage. Furthermore, in unbalanced grid conditions these methods [
3,
4], fail to provide a constant voltage to the batteries due to the lack of negative sequence compensator. The MPC-based control method for a three-level single-phase charger described in [
5] provides a smooth and low total harmonic distortion output to the battery. However, a single-phase based topology charger cannot supply as much output current as three-phase ones.
In [
6], a PI control method was used in the AC/DC converter side to maintain dc-link voltage constant while deadbeat control is used in the DC/DC converter to regulate the charging current to battery. The deadbeat control provides really fast transient response which setting time reaches the steady state in just a few sampling instants. However, it is really sensitive to the parametric uncertainty of the system and measurement noise, particularly for high sampling rates.
Most of the abovementioned methods [
1,
2,
4,
6] are using bi-directional DC/DC converters for CC/CV operation along with DC/AC inverters for power factor control and DC-link voltage control. DC/DC converter topologies have been proposed for single-phase [
7,
8] and three-phase chargers [
9,
10] to improve the charging efficiency. In [
7,
10], three operational modes for bidirectional chargers i.e., grid-to-vehicle (G2V), vehicle-to-grid (V2G), and vehicle-to-home (V2H) were considered to provide a full bidirectional charger capability for electric vehicles. These methods adopt classical controllers such as PI which require multi-loop gain tunings. Moreover, they did not consider how to handle unbalanced grid conditions.
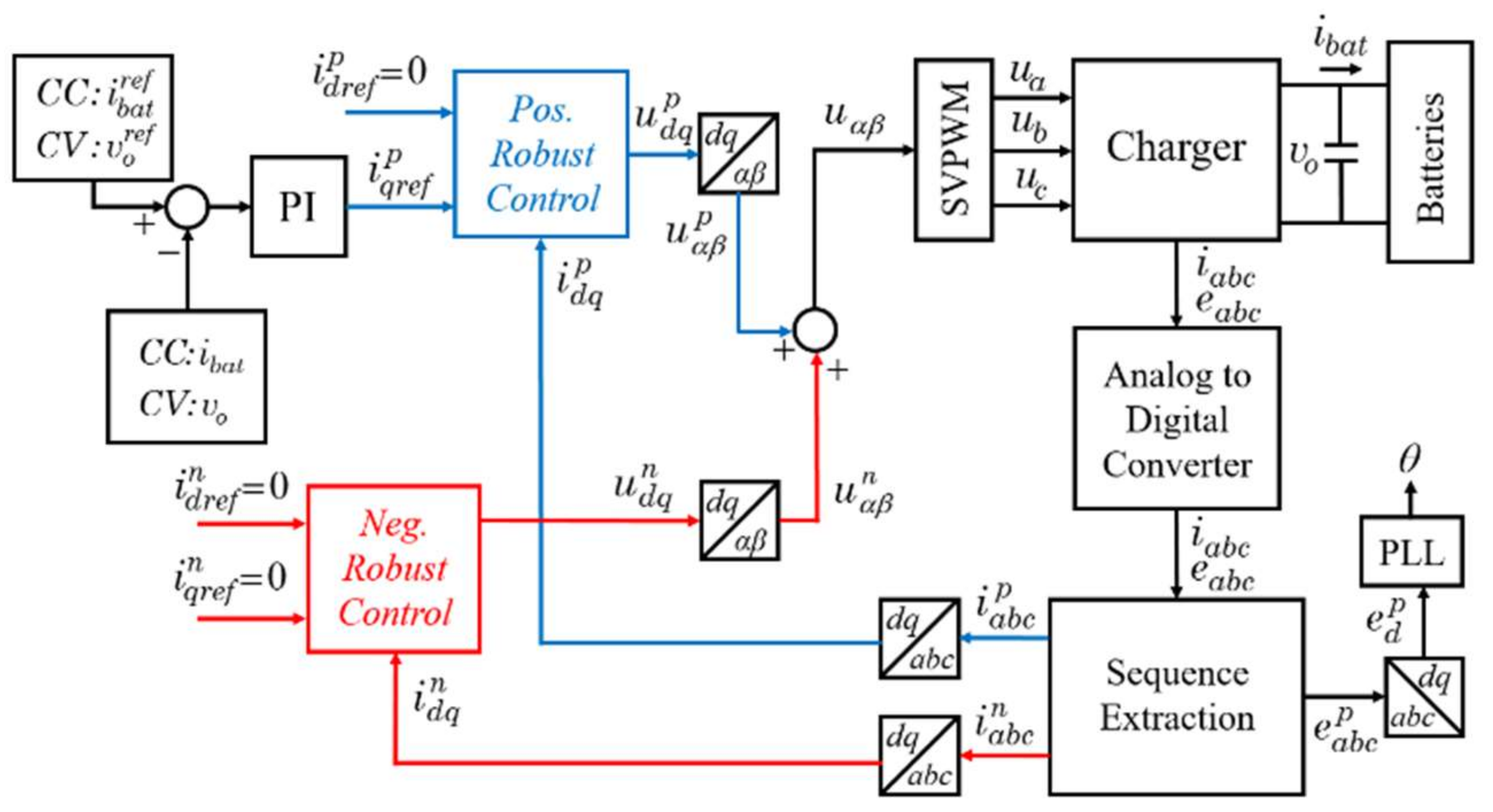
In this paper, a robust tracking control of a three-phase charger under unbalanced grid conditions is proposed without using DC/DC converter as an interface between the three-phase AC/DC converter and the batteries. Therefore, the charger is smaller in size and with less component expense. The battery is charged with a constant current until the voltage reaches the recommended maximum voltage, then the voltage is maintained constant until the current consumed by battery falls to a residual value. The control method consists of inner-loop robust grid-current control and outer-loop proportional integral control for constant current (CC) and constant voltage (CV) control. A dual-current control for the inner-loop positive and negative sequence is employed to eliminate the unbalanced current caused by the grid so that a constant current and voltage can be provided to the batteries. The inner-loop robust controllers utilize state feedback with integral action in the dq-synchronous frame. A linear matrix inequality-based optimization scheme is used to determine stabilizing gains of the controllers to maximize the convergence rate to steady state in the presence of uncertainties. The uncertainties of the system are described as the potential variation range of the inductance and resistance in the L-filter. The conventional phase-locked loop (PLL) method is considered in this paper to obtain the grid voltage phase angle.
3. System Description
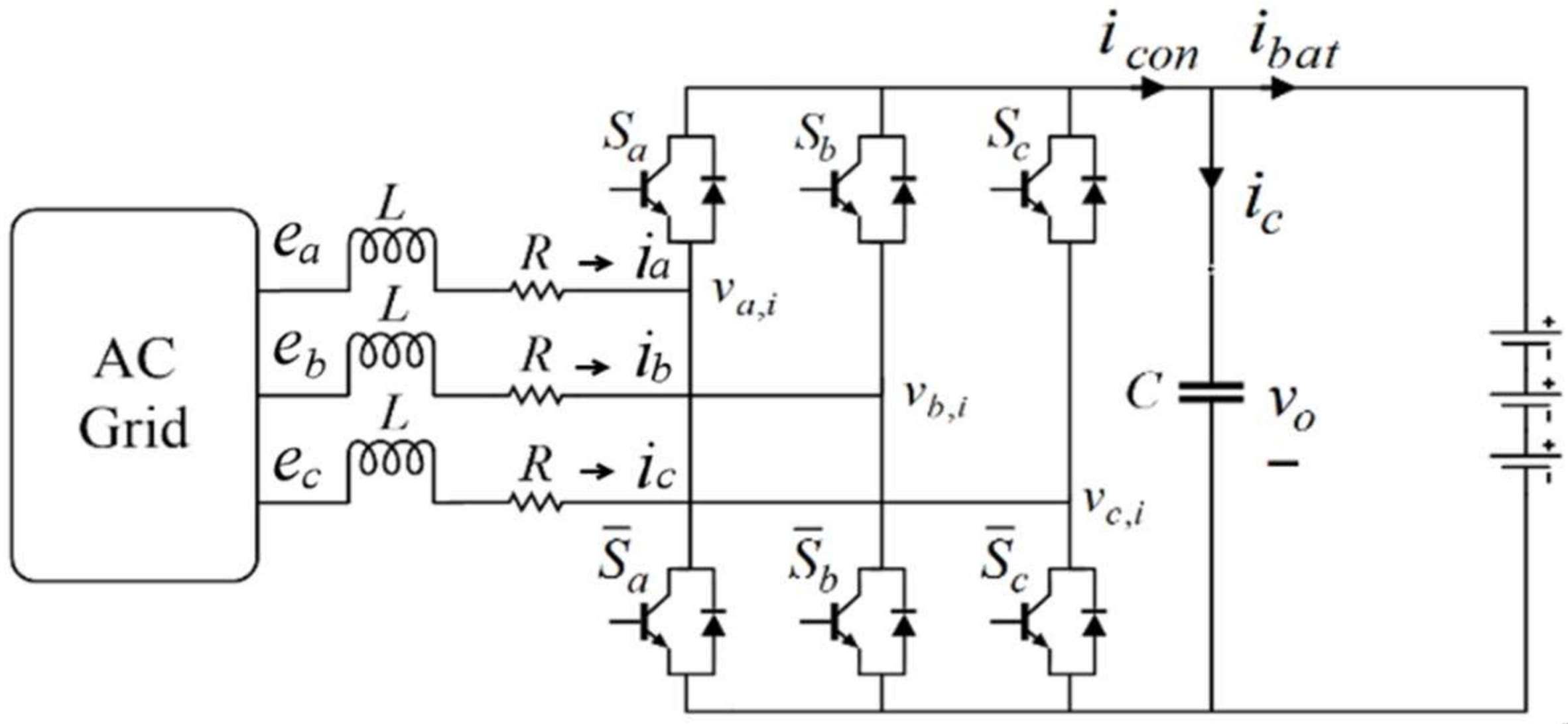
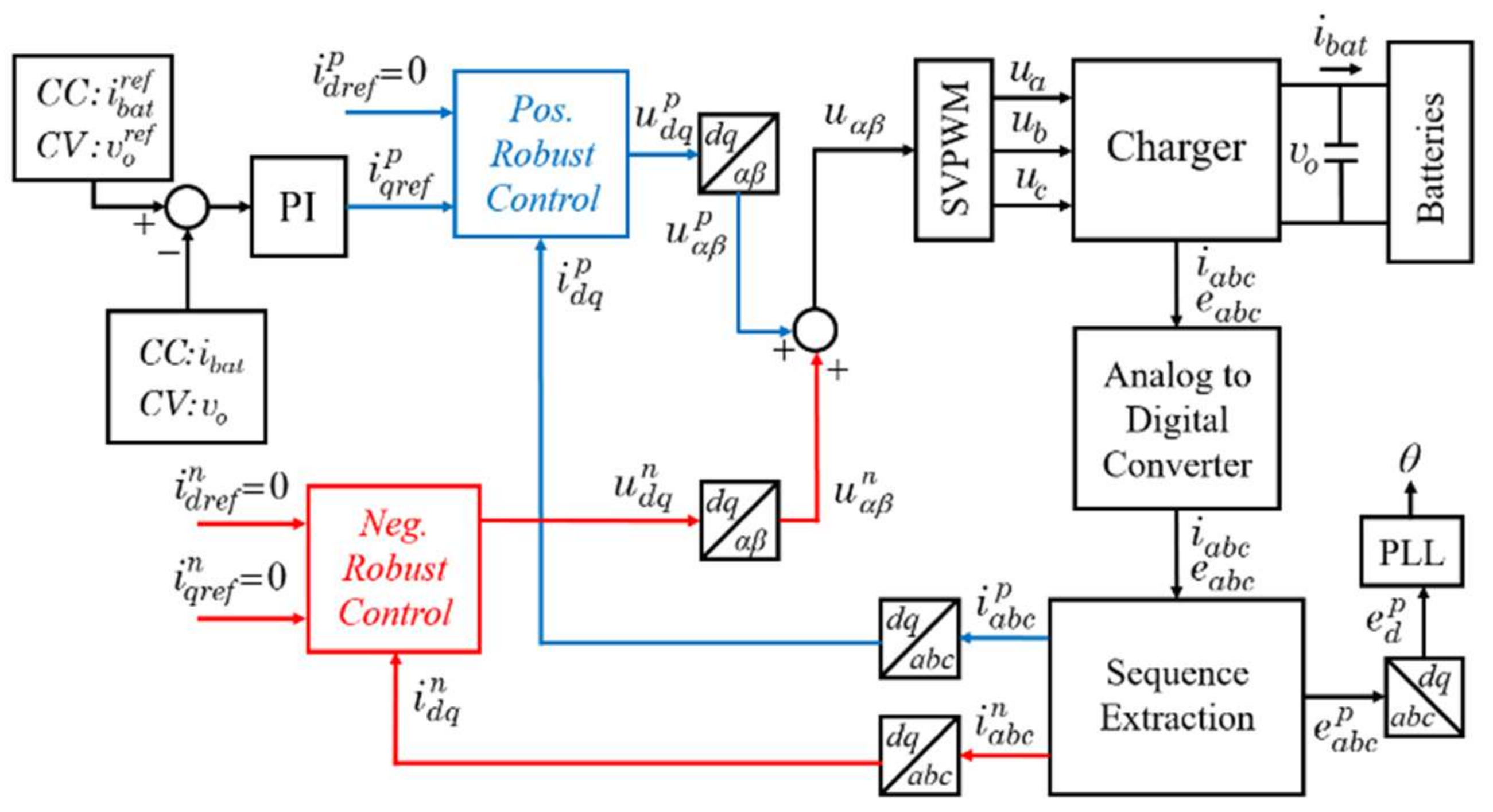
A three-phase charger is shown in
Figure 1.
The dynamics of the line current is expressed in the
abc-axis as follows:
where:
The switches operate in continuous conduction mode, where two switches in each leg of the AC/DC charger should be operated in a complementary mode to avoid short circuits. The switching states of the charger is determined by
ua,
ub or
uc as:
It is quite challenging to control a three-phase converter in
abc-frame due to its time-variant behavior, so the
dq transformation is used to obtain DC like signal in
dq-frame. Therefore, the dynamics (1) in
abc-axis can be transformed to
dq-axis as follows [
13]:
where
,
,
,
,
, and
ω is the angular frequency of the AC voltage source.
Any unbalanced three-phase voltage can be expressed by the sum of positive, negative and zero sequence [
14]. However, the three-phase charger system has only three wires therefore the zero sequence is does not exist. Hence, the unbalanced current and voltage can be expressed as:
The positive and negative sequence of the grid voltage are assumed to be:
where
α and
α2 are phase-shifting operators and defined as:
Substituting Equation (7) into Equation (6) yields:
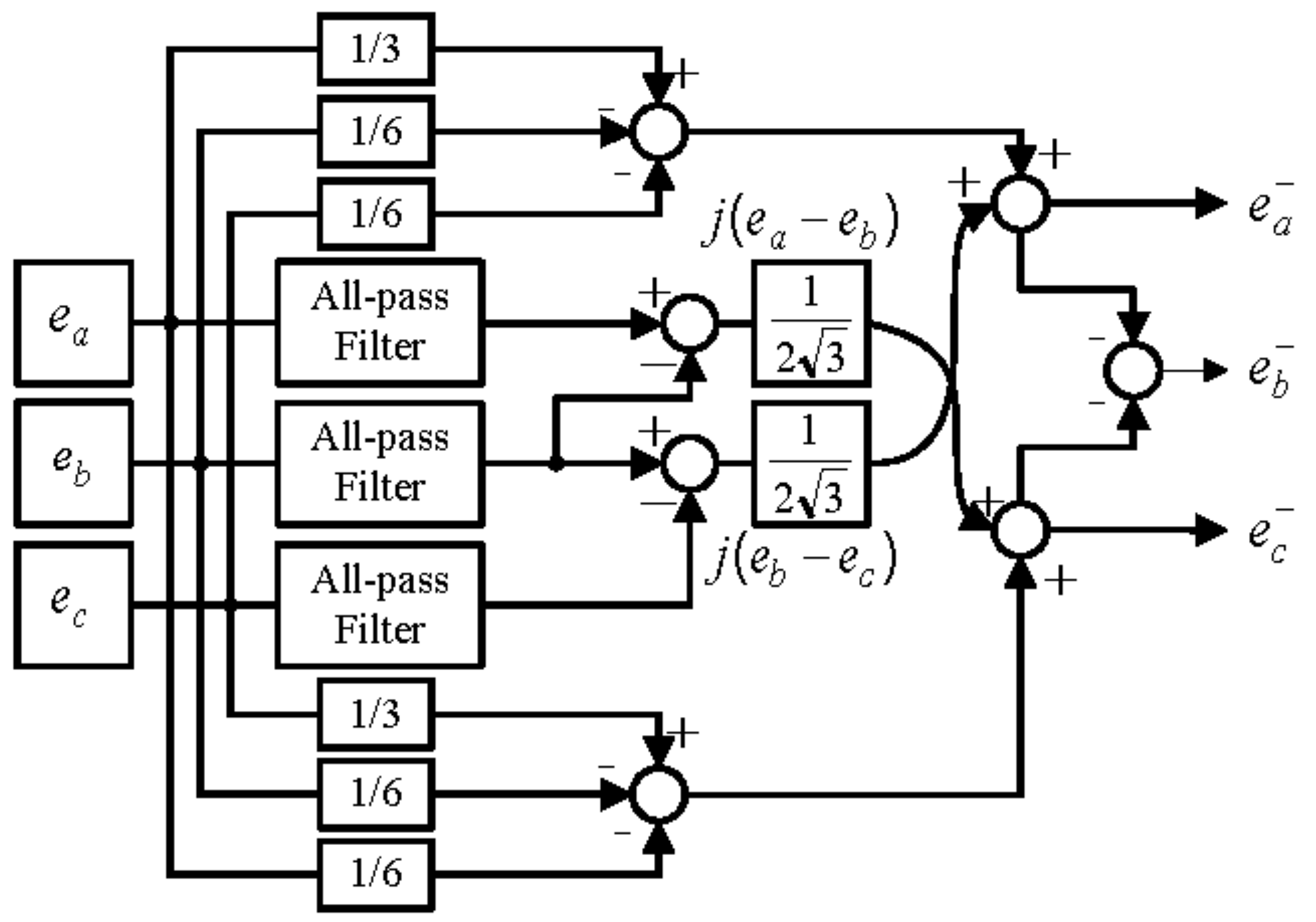
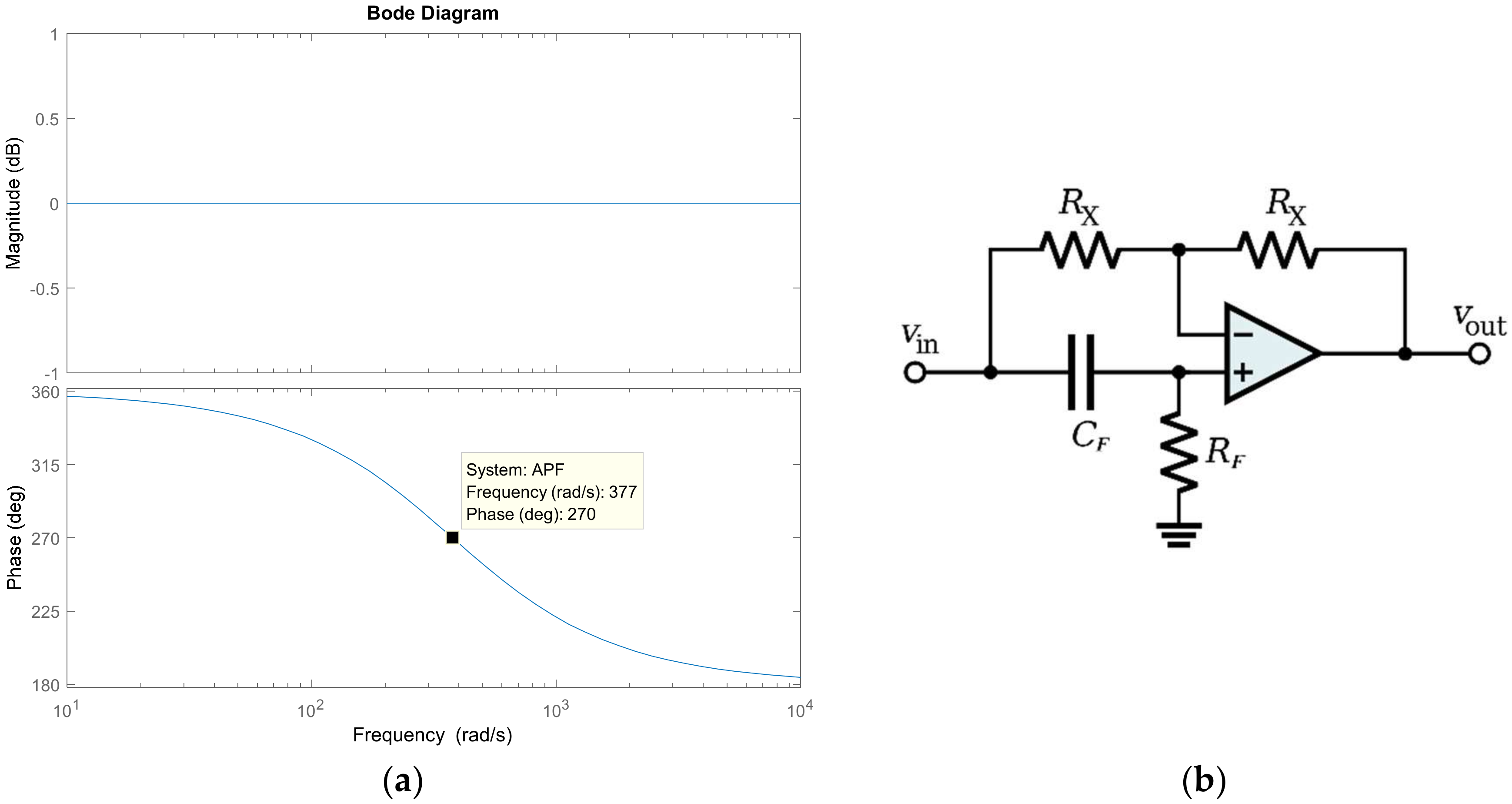
An all-pass filter allows all range of frequencies to pass, however it is used to obtain the imaginary part of Equation (8) by shifting 90° from the original phase. The characteristic of the all-pass filter is validated in
Figure 2a using a Bode plot and the schematic of an all-pass filter is shown in
Figure 2b.
The transfer function of the all-pass filter can be expressed as follows:
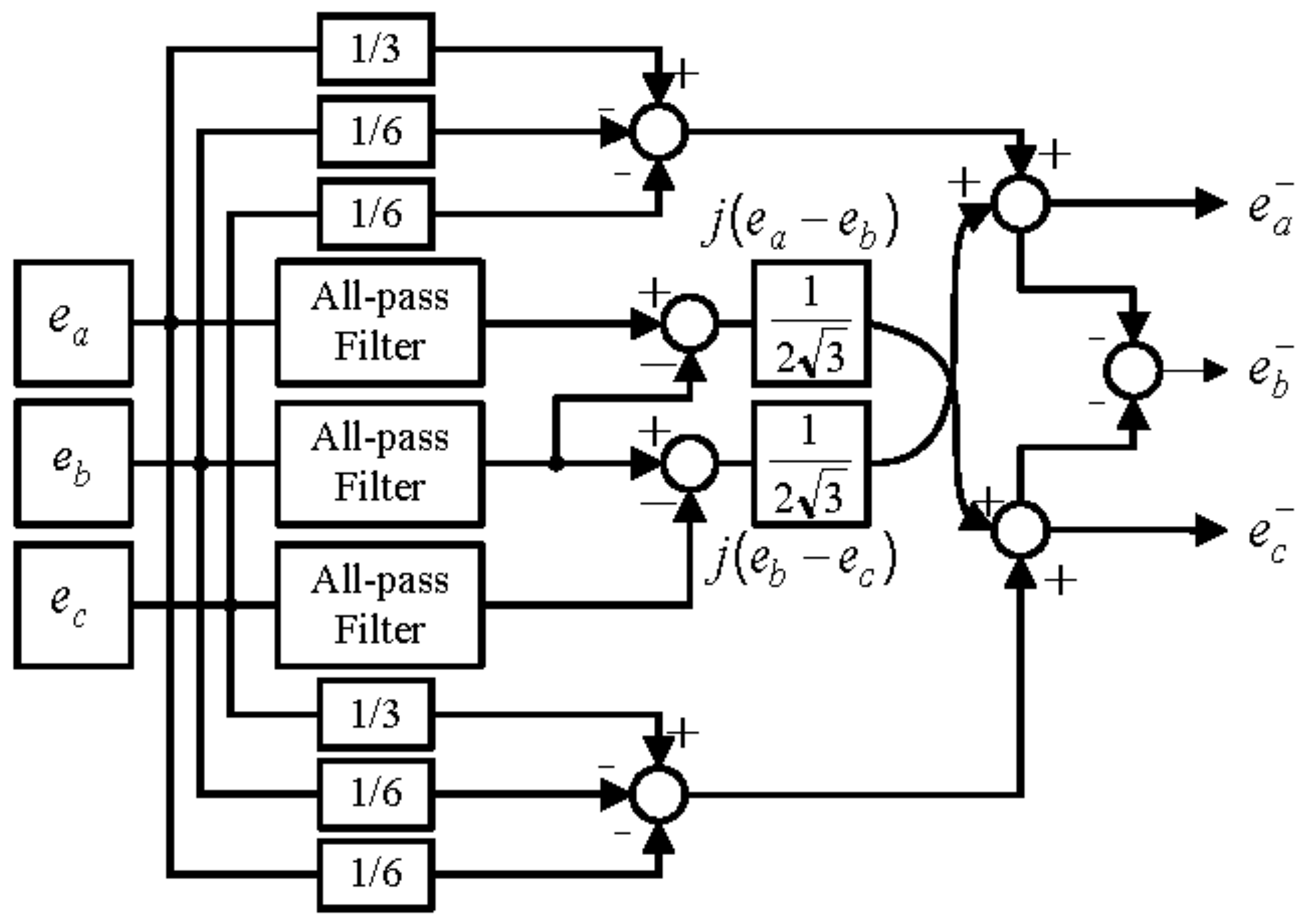
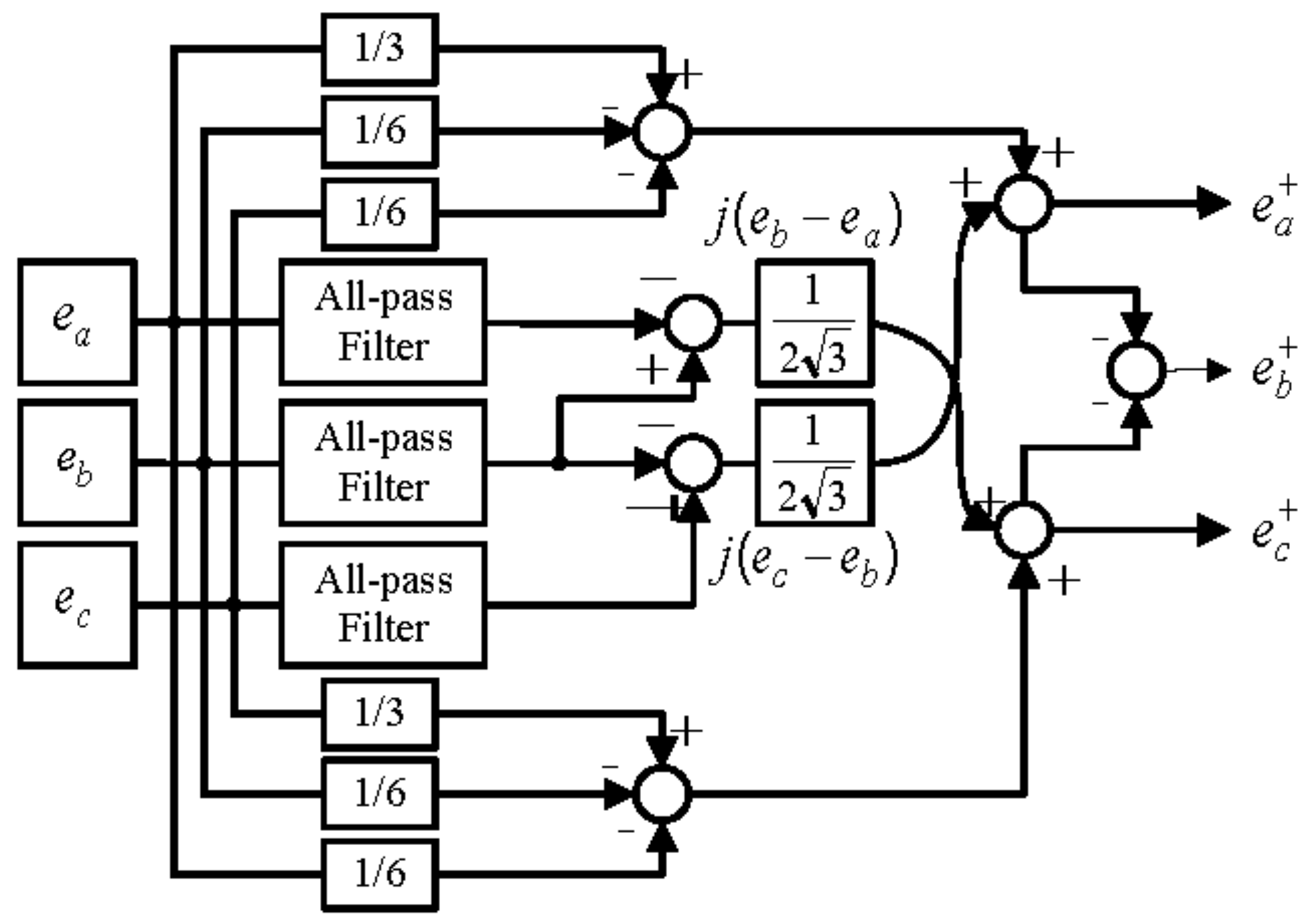
The same process is used to extract positive and negative sequence of grid current and voltage. The block diagrams of positive and negative sequence extraction are shown in
Figure 3 and
Figure 4, respectively.
From Equation (5), the current dynamics (4) can be rewritten as a combination of positive and negative sequence. The dynamic of both sequences is almost identical; however, the only difference is the sign of
ω due to the inverse direction of the negative sequence vector rotation [
15]. Then, we have:
where
,
,
,
,
and
are the grid current and control input in
dq-frame, respectively. The output voltage
is governed by the following dynamic equation:
where:
and
is the converter current and
is an output current to the battery.
Model (10) can be transformed in the following discrete-time system with sampling time
h:
where
,
,
,
.
4. Robust Controller Design
In this section, the uncertainties model of the system, offset-free control and robust optimal gain are discussed. Suppose that the value of
L and
R in each phase are equal but vary in certain ranges as indicated below:
Here, we denote the matrices (
A,
B) corresponding to the four possible combinations of the immoderate value of 1/
L and 1/
R as (
Ai,
Bi) (
i = 1, 2, 3, 4) and suppose that the matrices (
A,
B) belongs to the polytopic uncertain set
Ψ below:
The uncertainties of the system can be any kind of variation, but should lies within the range (14). The system uncertain range can be determined as:
where
Rnorm and
Lnorm are nominal value of the filter resistance and inductance, respectively, and
µ (>1) can be considered as a tuning parameter.
In consideration of compensating the offset error despite the system’s uncertainty model, the control law based on [
16] is employed for Equation (13):
where
and
are state feedback and integrator gains, respectively. Because of the integrator in Equation (17), the steady-state error between the reference state
and the grid-current
will be compensated provided that the closed-loop system is stable.
In order to eliminate the unbalanced current caused by negative sequence and provide a constant charging current and voltage to the batteries, the reference state should be given as:
where
is generated by the outer-loop controller depending on its CC and CV control objectives.
The same process is used to find optimal gains for positive and negative sequence, so the procedure is unified. A systematic design method was proposed in [
17] to obtain stabilizing state feedback gain
K and integral gain
L of Relation (17) using LMI. From relation (13) and (17), we get:
where
,
,
,
,
.
The control input
u(
k) can be rewritten as:
Assume that
D(
k) = 0 to determine stabilizing gain
F, then the closed-loop system can be obtained as follows:
The closed-loop dynamic (21) stable if there exists a positive-definite matrix
W such that:
It is obvious that the condition (22) holds for some
By applying Schur complement and uncertain set Equation (15) to Equation (22), we get [
17]
where
,
,
,
,
, (
i = 1,2,3,4).
To summarize, closed-loop system Equation (22) is asymptotically stable if there exist symmetric positive definite matrices
S and
and a matrix
H such that Equation (24) holds and the stabilizing gain is given as:
Assume that
or equivalent to
It can be expected that a small
α would give a fast convergence of
z to the origin. Therefore, to obtain optimal gain
F such that the convergence time is minimized, the following optimization problem should be solved:
This optimization scheme is a generalized eigenvalue problem [
18] which can be solve efficiently by the MATLAB 2014a LMI Toolbox YALMIP solver (MathWorks, Natick, MA, USA). The implementation of (27) can be done by following the YALMIP manual and it can be found on the YALMIP website (
www.yalmip.github.io).
6. Simulation Results
This section presents the results of the simulation to verify the proposed method. The simulation is implemented using MATLAB 2014a LMI toolbox (YALMIP solver) to obtain robust gain for the inner-loop controller. After receiving the optimal gains from MATLAB, the controllers were applied using PSIM simulation tool. The parameters of the system are shown in
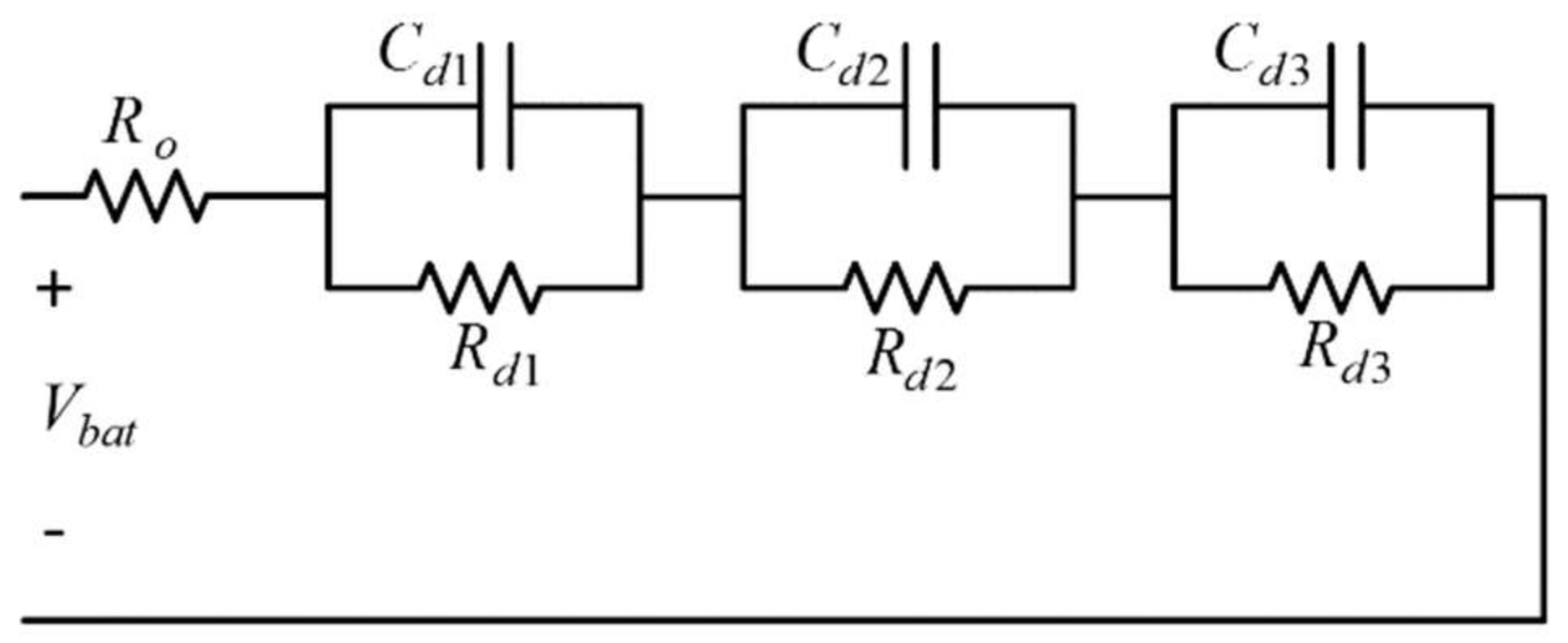
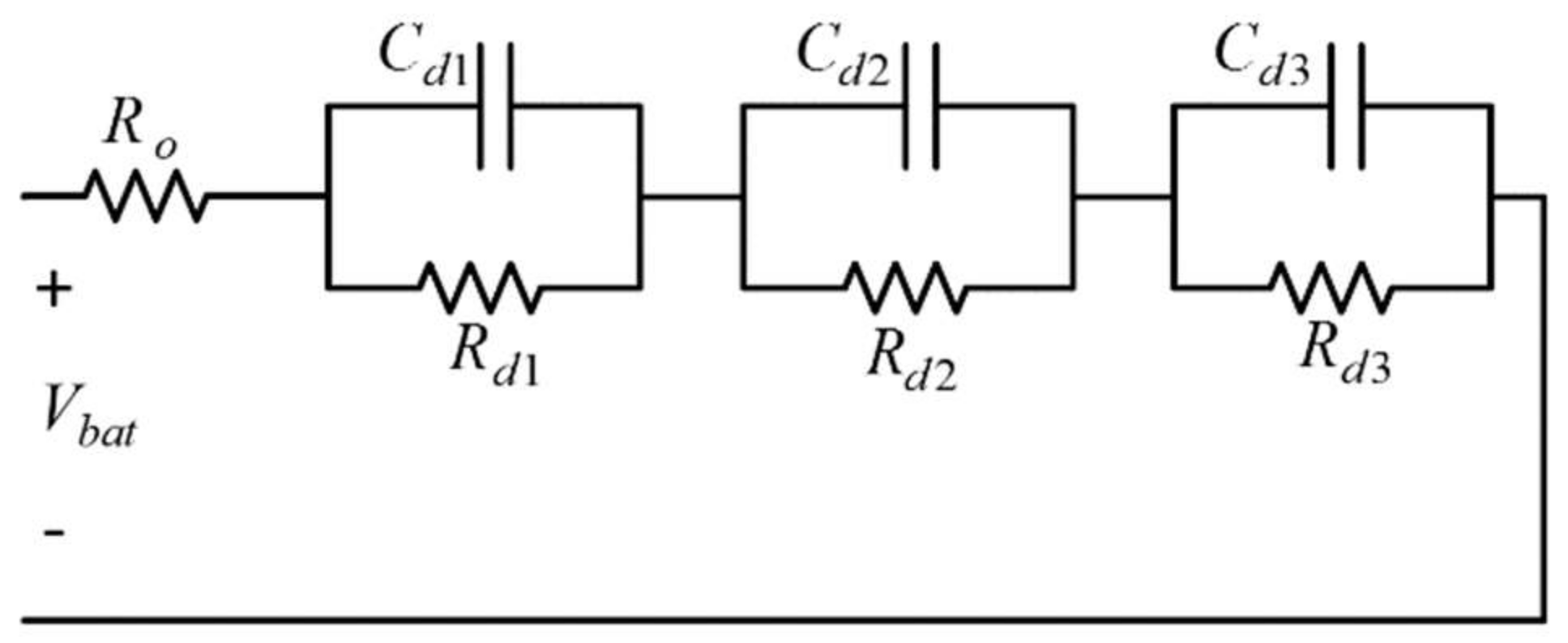
Table 4. The control algorithm is conducted using a DLL block from Microsoft Visual Studio and the sampling rate is set to 10 kHz. The 3-RC equivalent circuit of
Figure 6 [
18,
19] is used for the simulation studies. The values of parameters are determined as
with
The implementation of the proposed control strategy can be summarized as follows:
- Step 1:
Derive the discrete-time model for based on Relation (13) using nominal value of inductance L and resistance R.
- Step 2:
Choose an initial uncertainty range of the parameters Relation (14), e.g., µ = 1.1, and corresponding set Ψ.
- Step 3:
Compute the state feedback gain Kpn and integrator gain Lpn for both positive and negative sequences by solving the optimization problem (26) using YALMIP LMI solver.
- Step 4:
Implement the inner-loop current control Relation (17) to the charger.
- Step 5:
If the closed-loop system shows serious overshoot or becomes unstable, then adjust the uncertainty range; i.e., raise the value of µ and repeat the procedure from Step 3.
- Step 6:
After the closed-loop system becomes stable, then apply the outer-loop control for CC or CV.
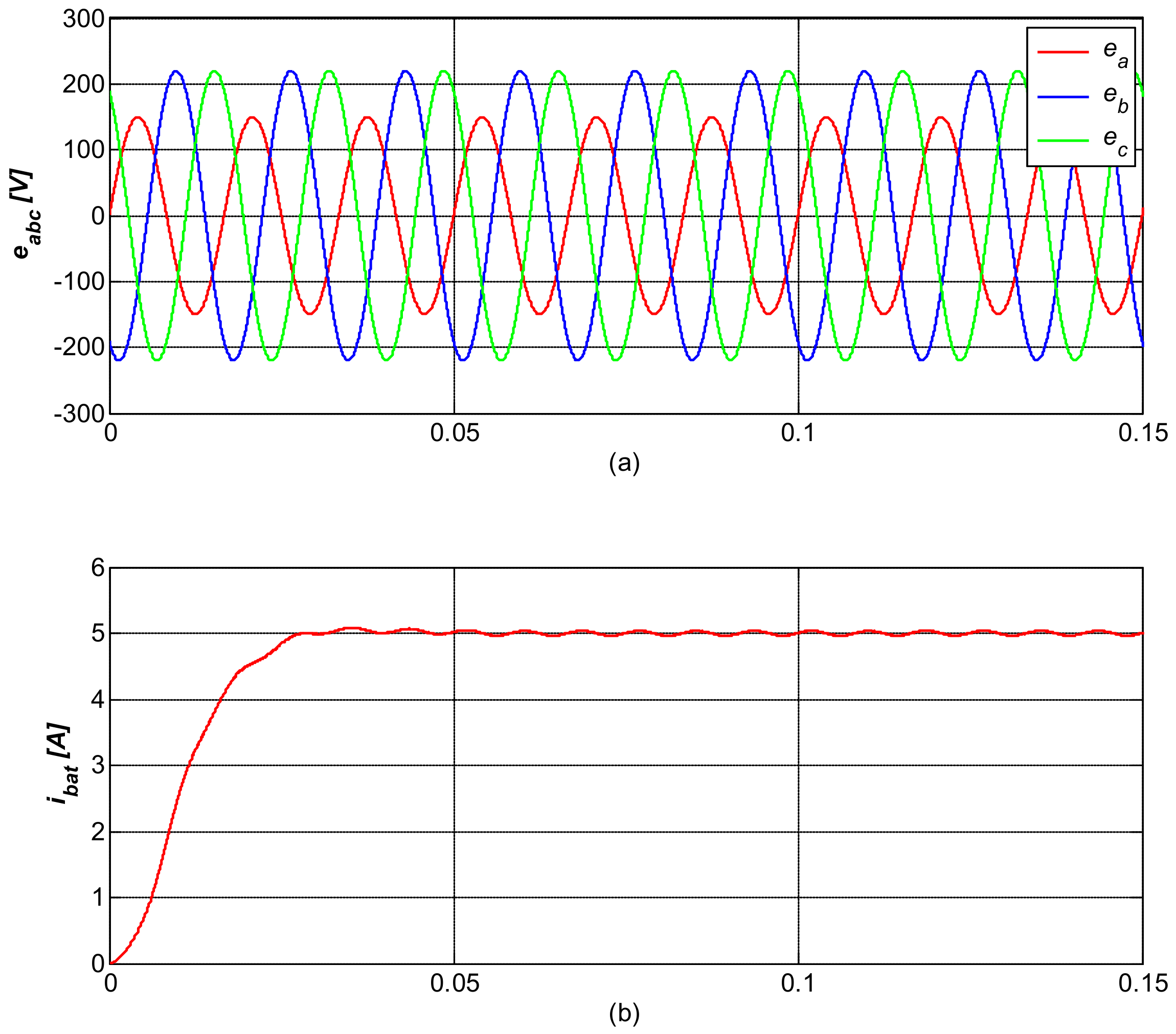
Here, the simulation performances of the proposed charger are discussed.
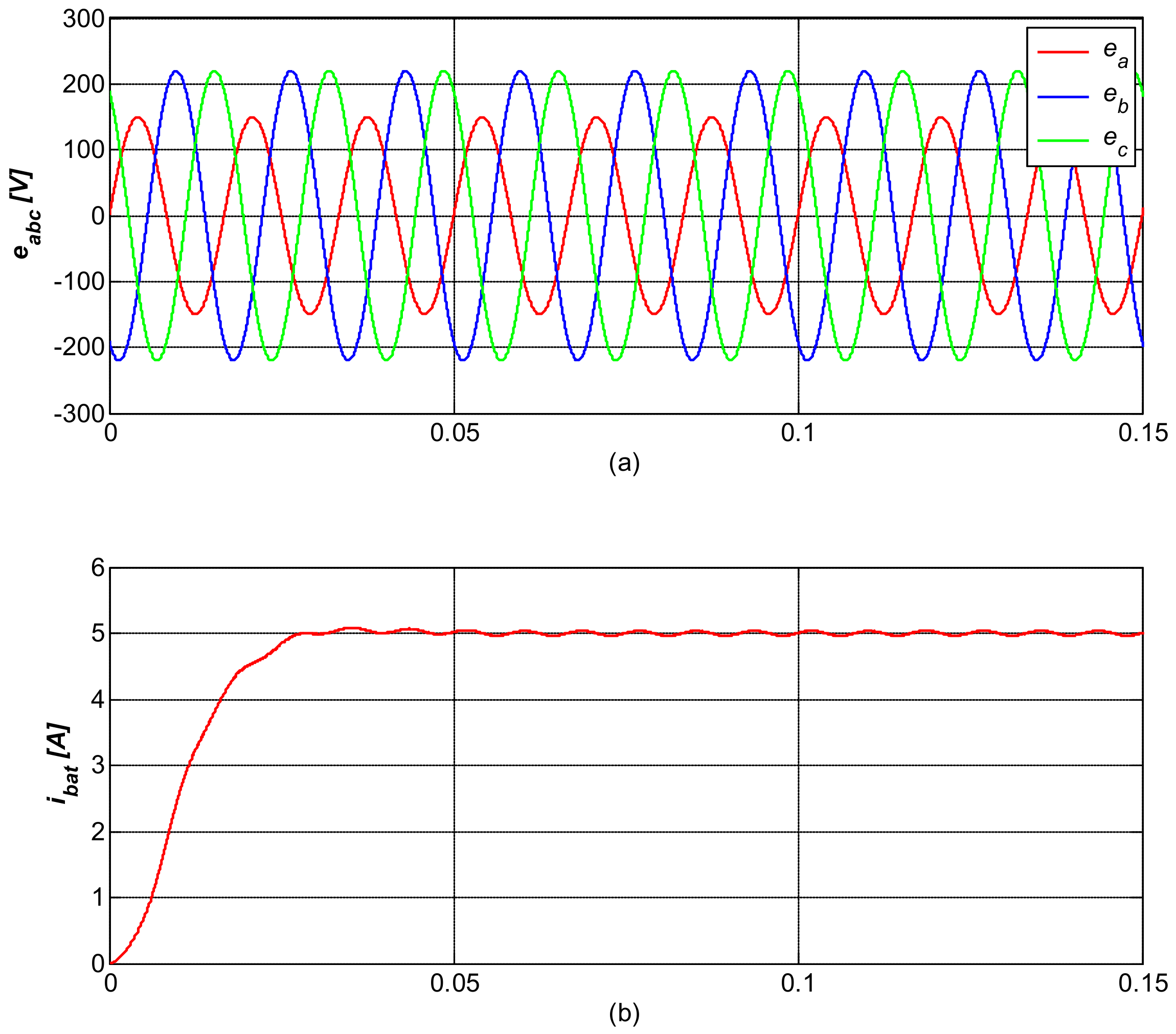
Figure 7a shows an unbalanced input three-phase grid-voltage supplied to charger in CC charging mode. In
Figure 7b, the charger is still able to provide a considerable constant current even under unbalanced grid-voltage thanks to the its negative sequence compensator.
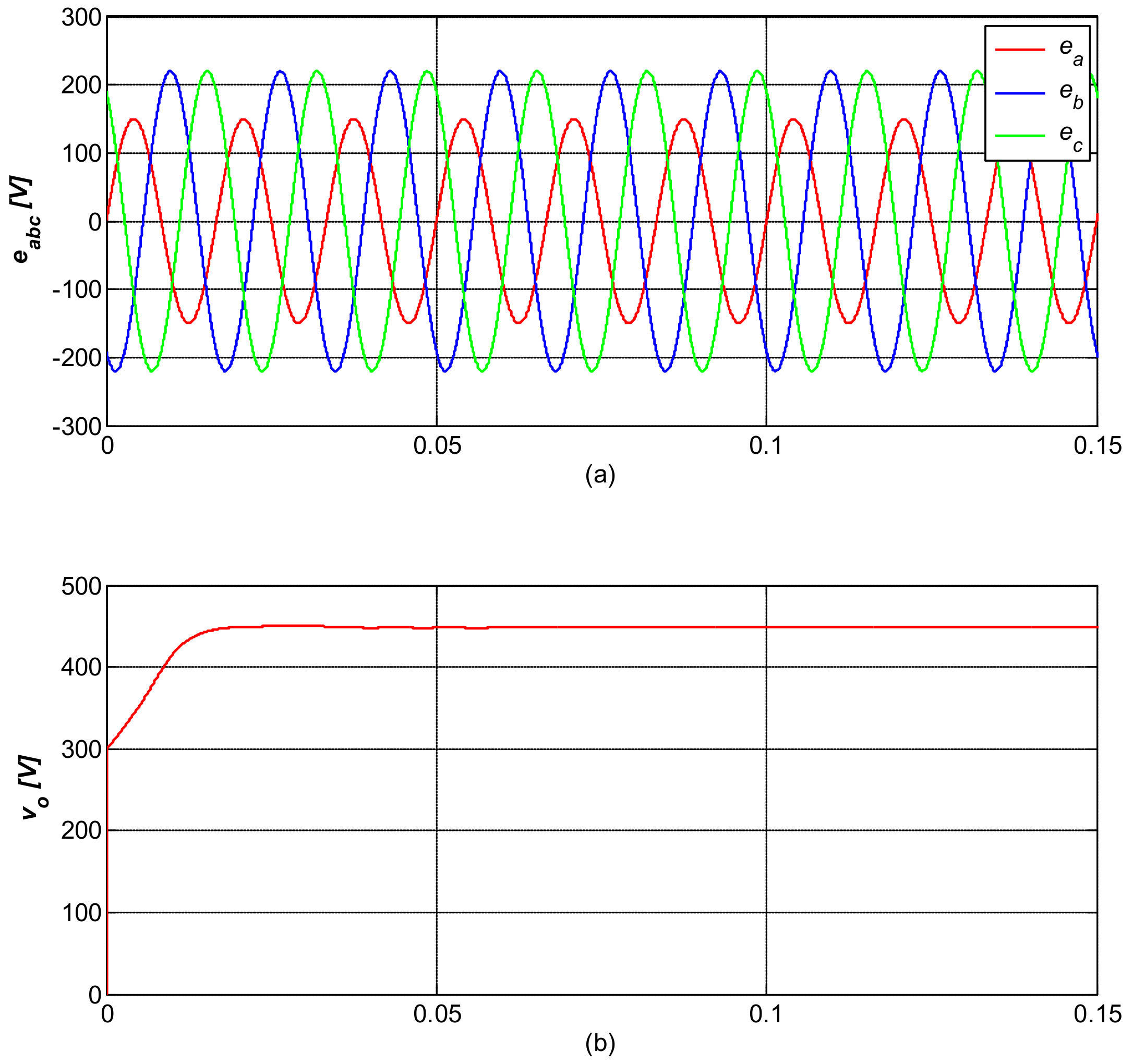
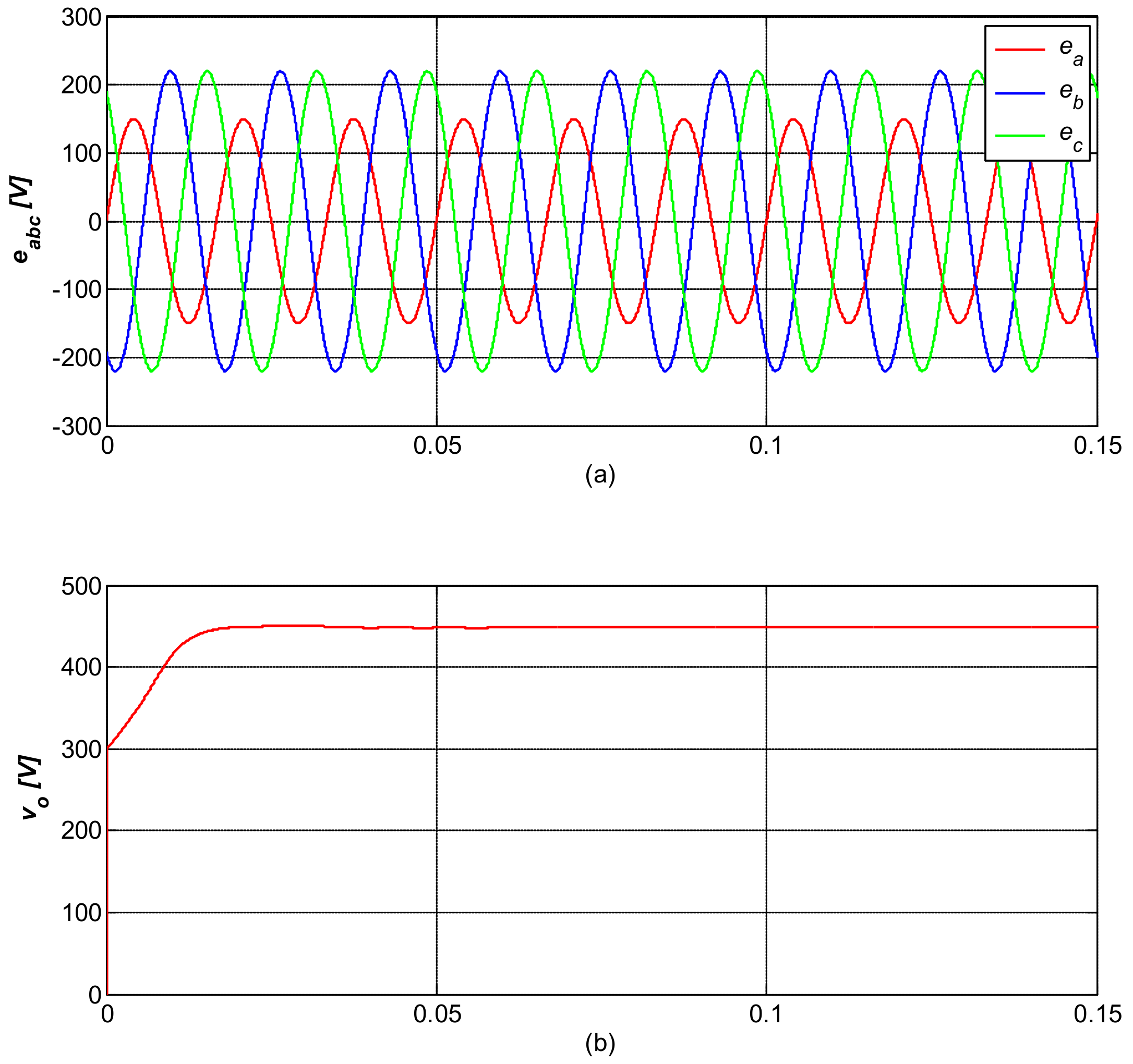
The CV charging mode is validated in
Figure 8. We can see that the transient response of the battery voltage in CV mode is fast and constant even the three-phase input is unbalance as shown in
Figure 8b.
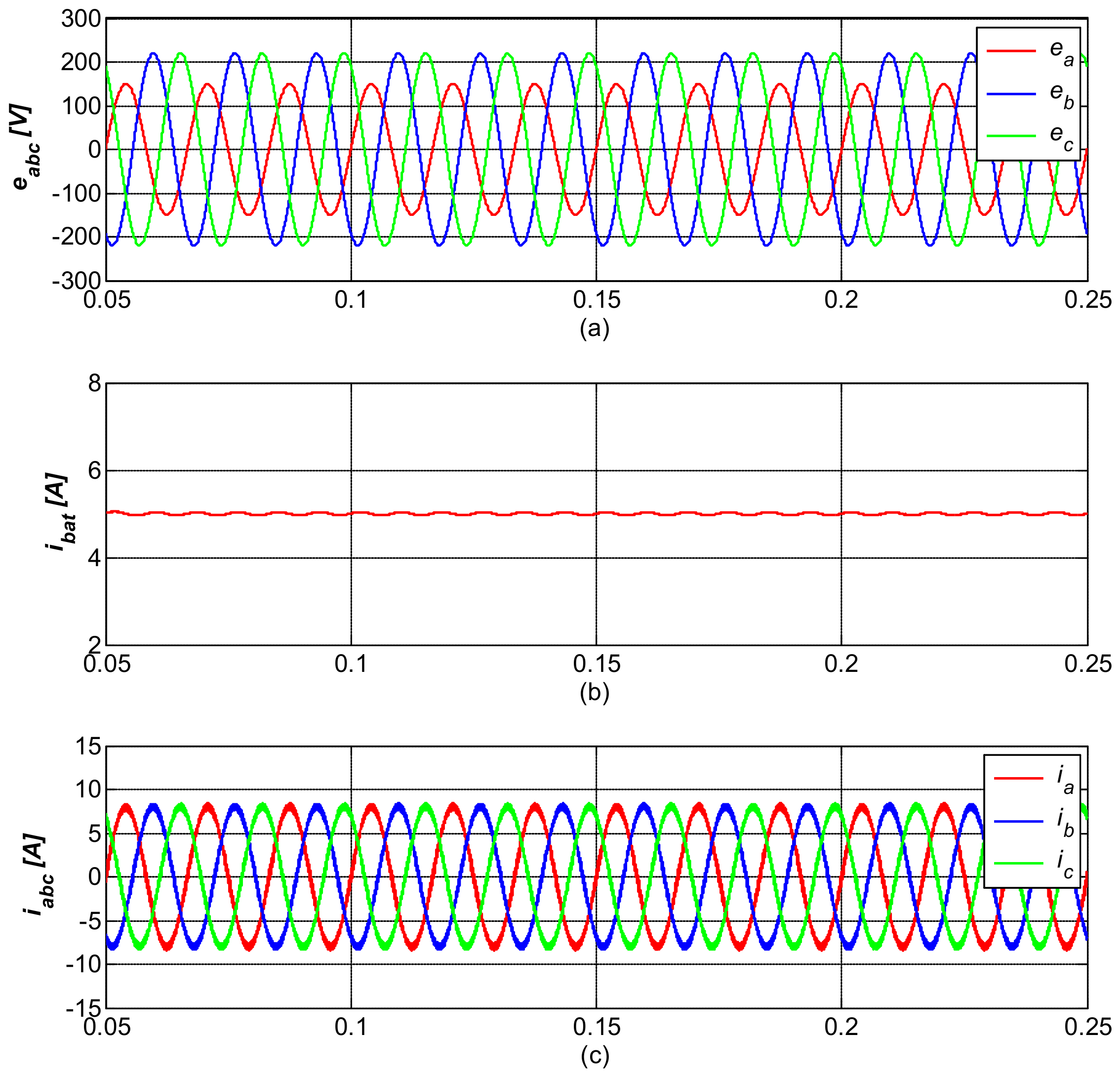
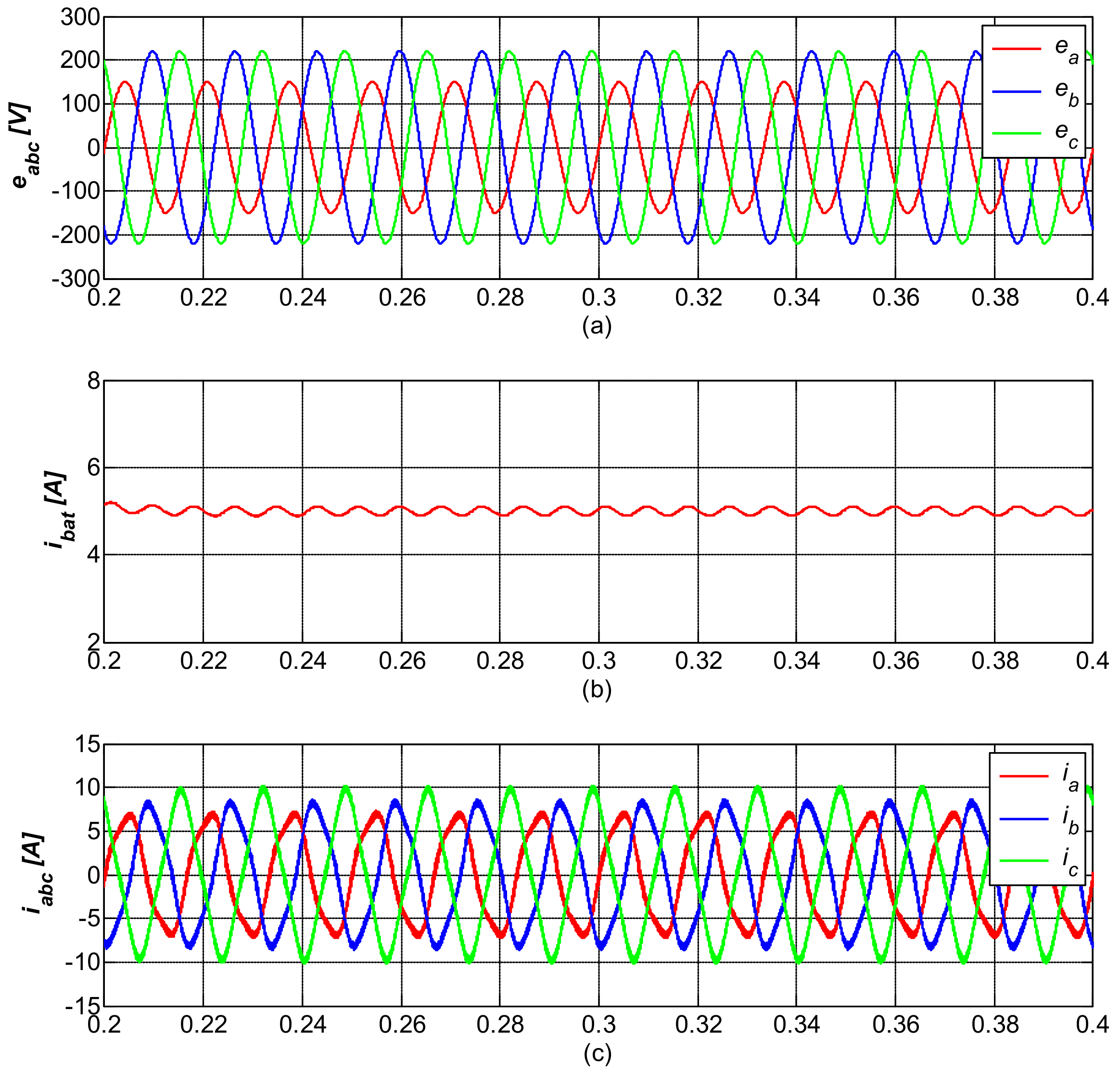
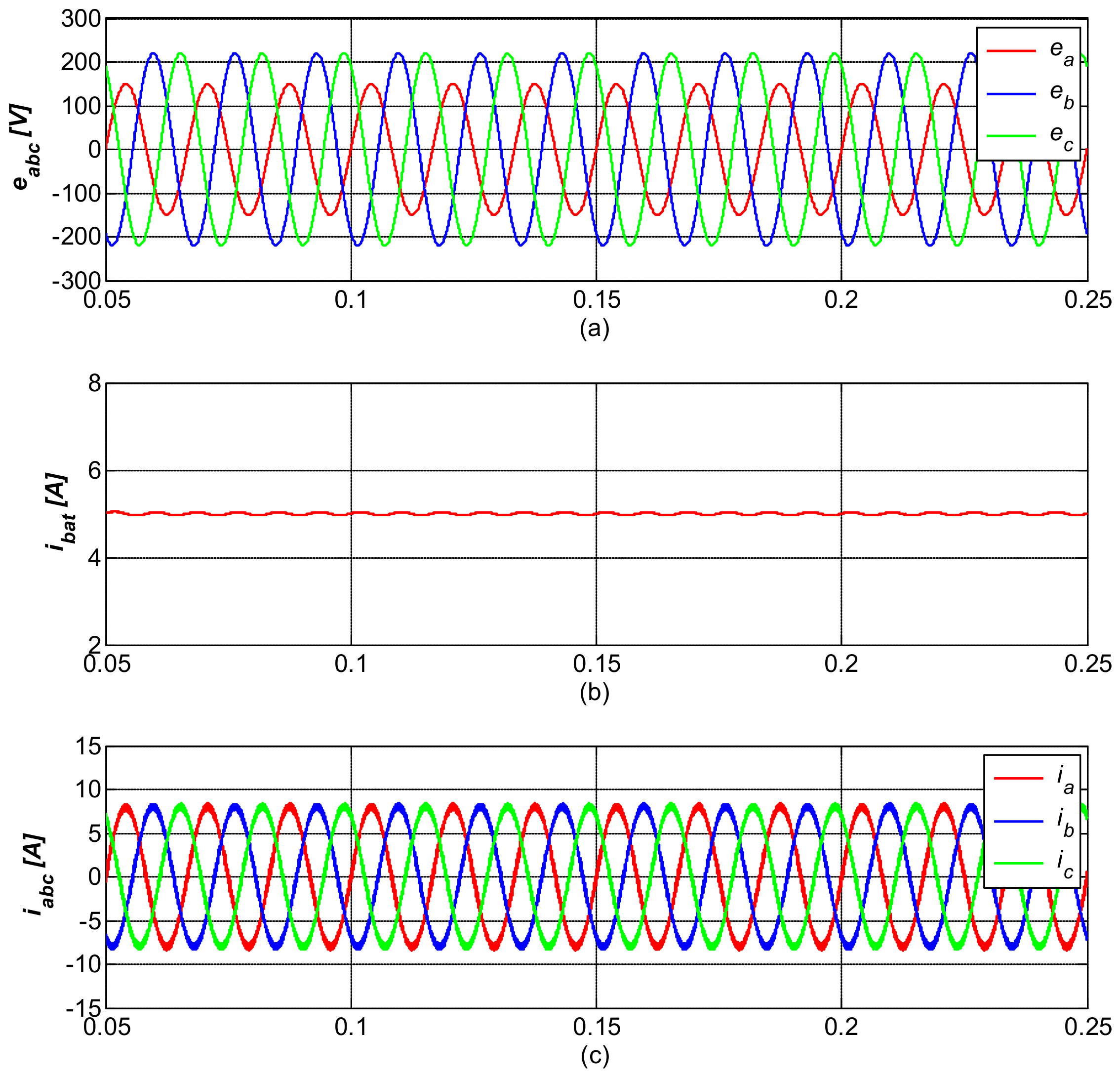
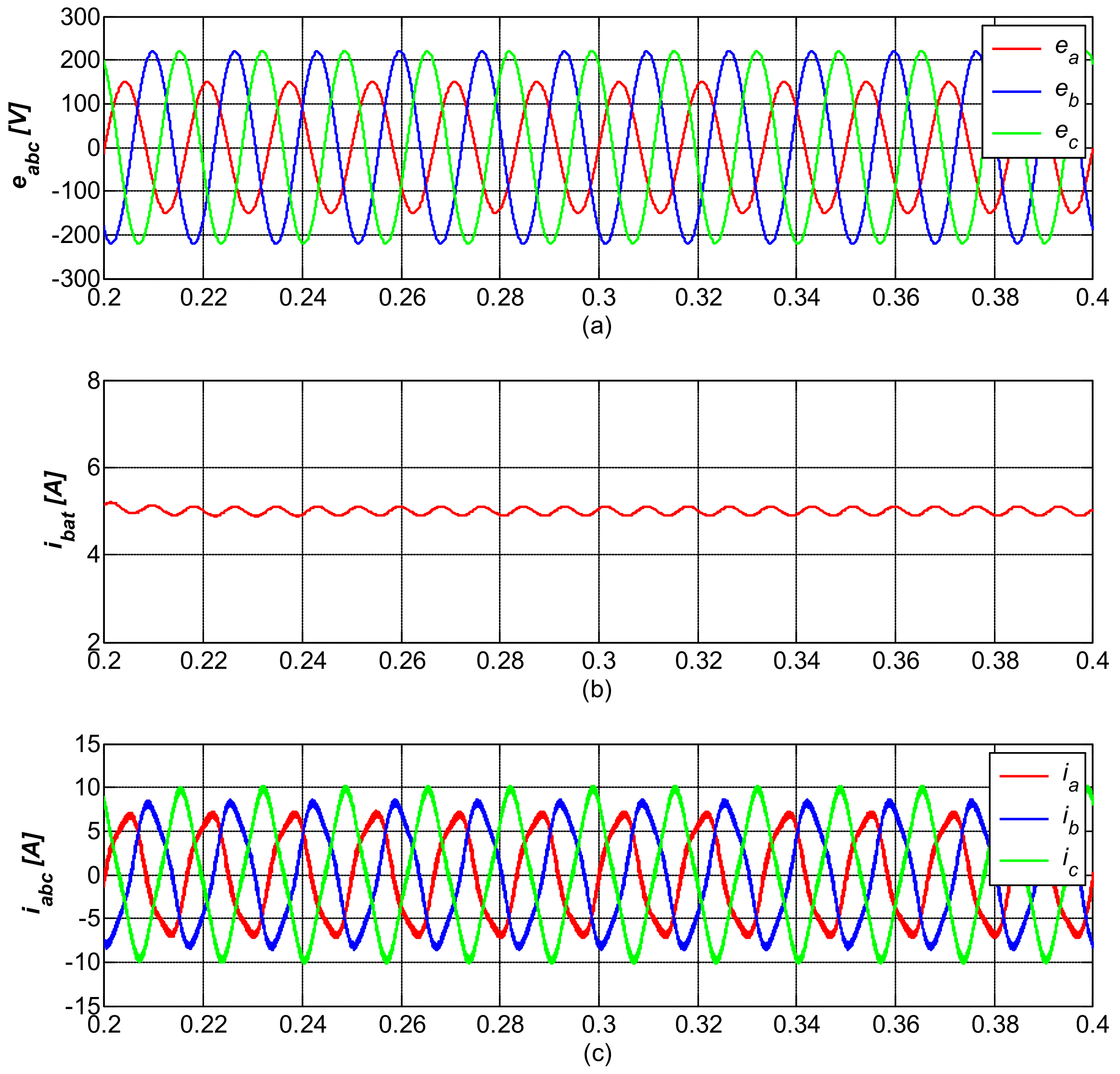
Let us discuss the comparison between the controller with and without negative sequence compensator in
Figure 9 and
Figure 10, respectively. It can be noted that the controller with negative sequence compensator performs well under unbalanced input grid-voltage conditions. Both the battery current and three-phase grid-current are remarkably acceptable, as shown in
Figure 9b,c, respectively. In
Figure 10, the simulation performance of the controller without negative sequence compensator is shown. Its performances, however, are not good compared to those of controller with sequence controller. It can be noted that the battery is has high oscillation and the grid-current does not show an appropriate waveform.
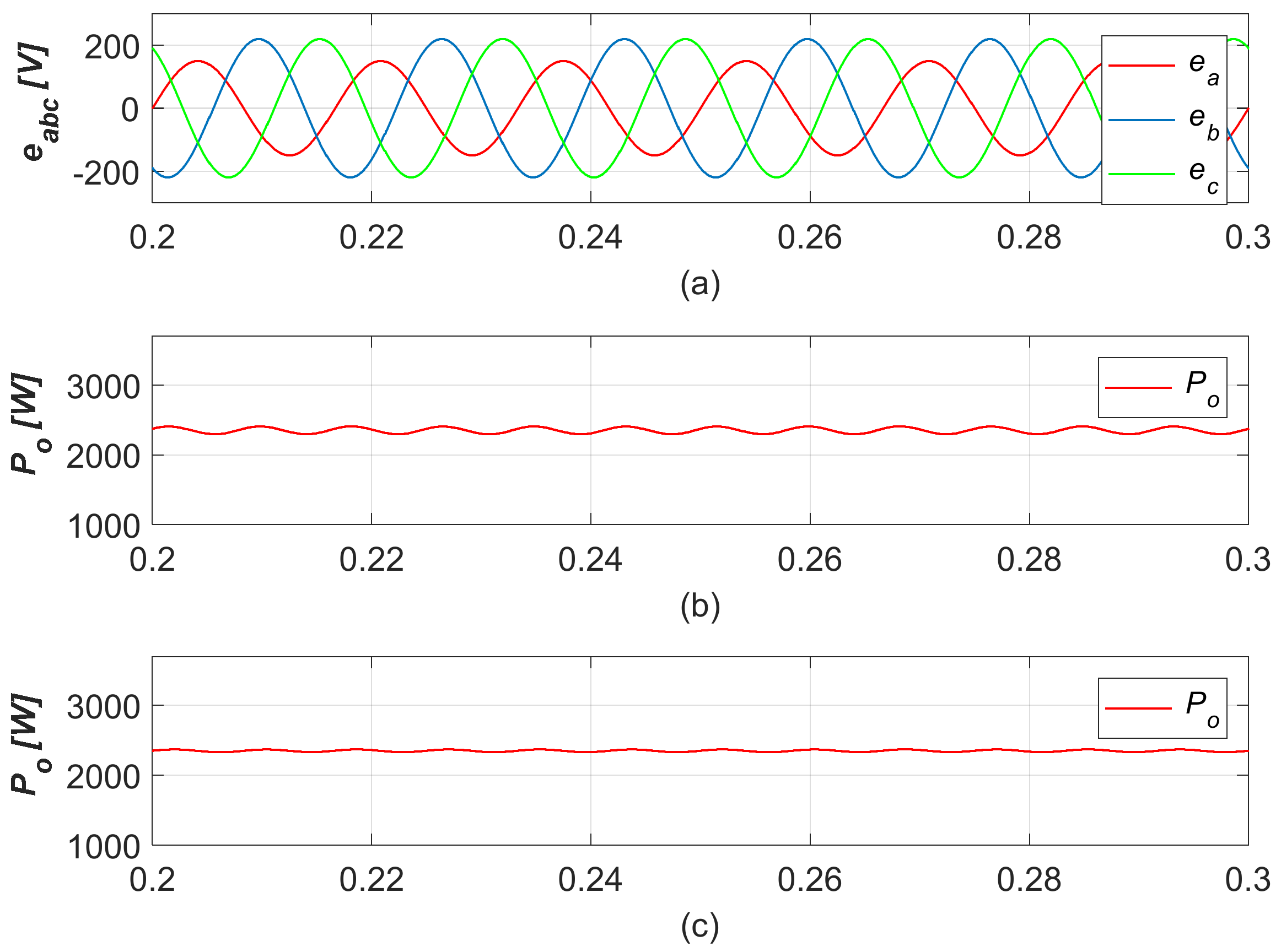
Figure 11 compares the output power of the proposed method with negative sequence compensator (
Figure 11c), and without negative sequence compensator (
Figure 11b). It is obvious to see that the proposed method provides a considerably constant output power to the batteries even under unbalanced grid conditions. On the other hand, it can be seen that without negative sequence compensator the charger fails to provide a constant power to the batteries. The output power is oscillating with double the system frequency which is not good considering the battery health conditions.
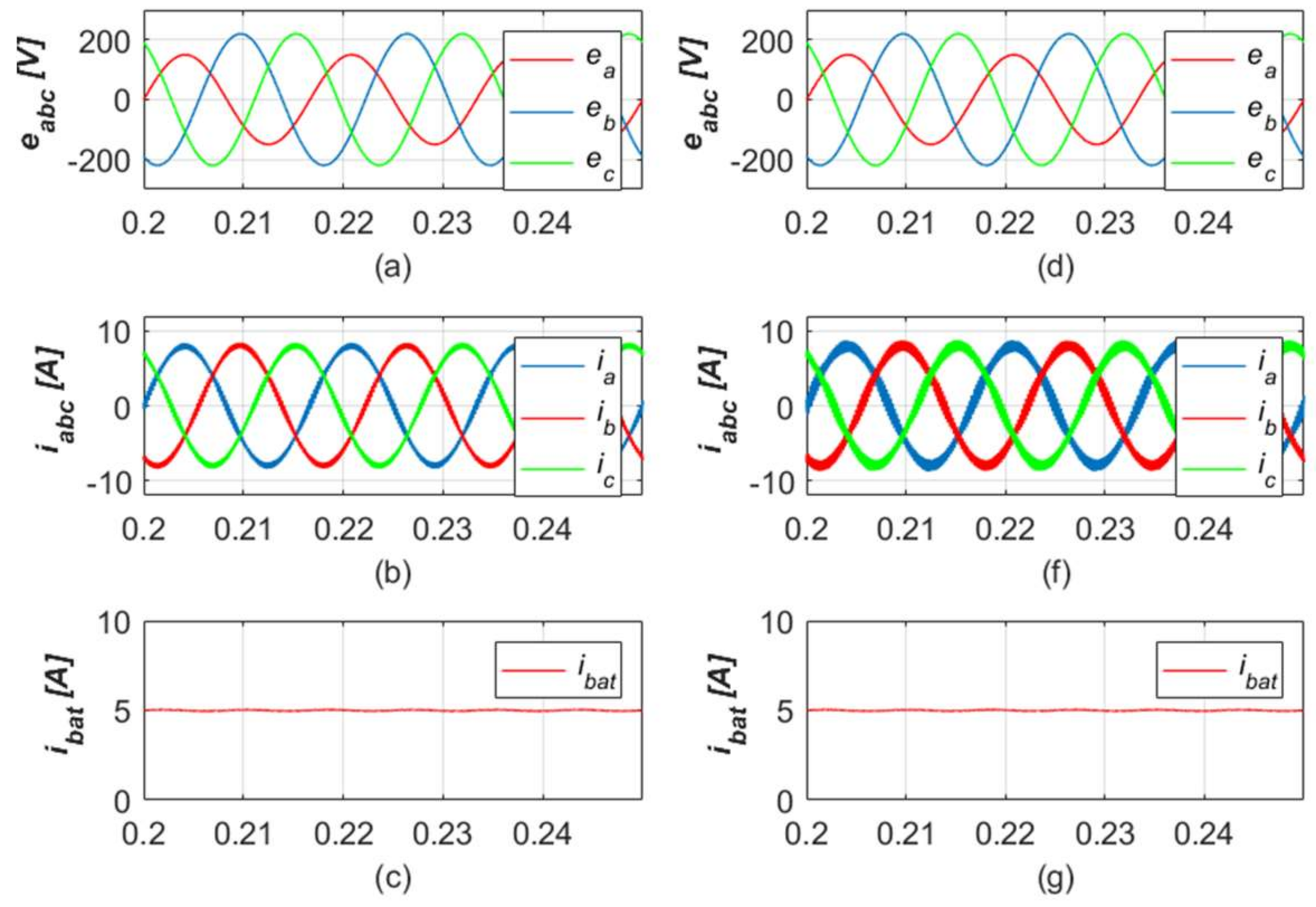
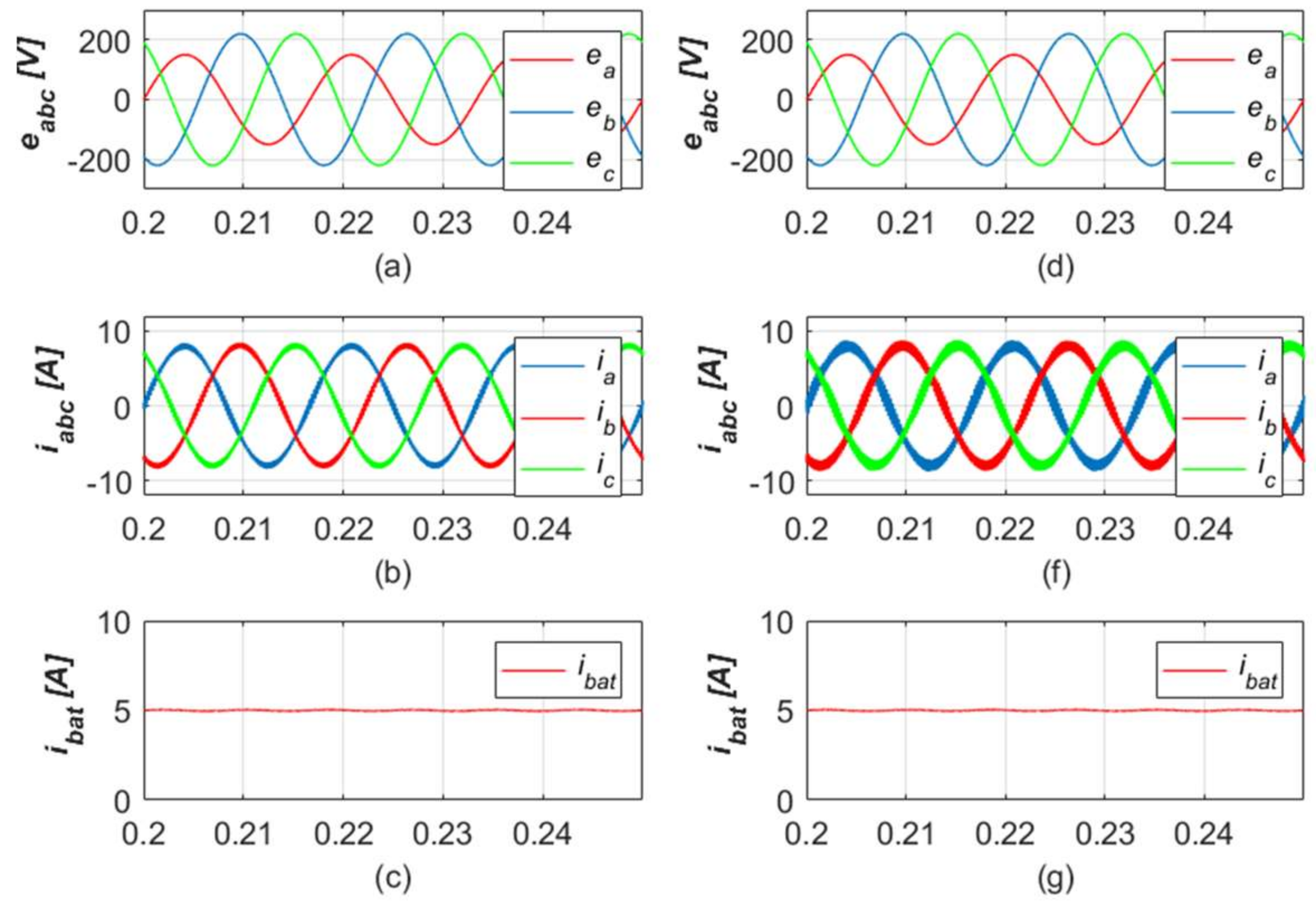
In
Figure 12, the robustness of the proposed control method is validated. As it is shown in
Figure 12a–c, the control method is implemented using a nominal value of the
L-filter as shown in
Table 4. The grid and charger output current perform really well, with real smoothness and symmetry although the phase-a grid-voltage drops to a certain level. To test the robustness of the proposed controller, the nominal value of
L-filter is changed but works under the same robust stabilizing gains. The value of the inductance and resistance are reduced by half (× 0.5) which are 2.5 mH and 0.05 Ω, respectively. From
Figure 12d–f, it can be seen that the charger provides almost identical constant output current as the one with nominal value. It can be assumed that the controller works pretty well under the uncertainty of the
L-filter’s parameters.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}