A Gas Path Fault Contribution Matrix for Marine Gas Turbine Diagnosis Based on a Multiple Model Fault Detection and Isolation Approach



Abstract
1. Introduction
2. The FCM Based MM-FDI Approach
2.1. Model Set Design Based on FCM
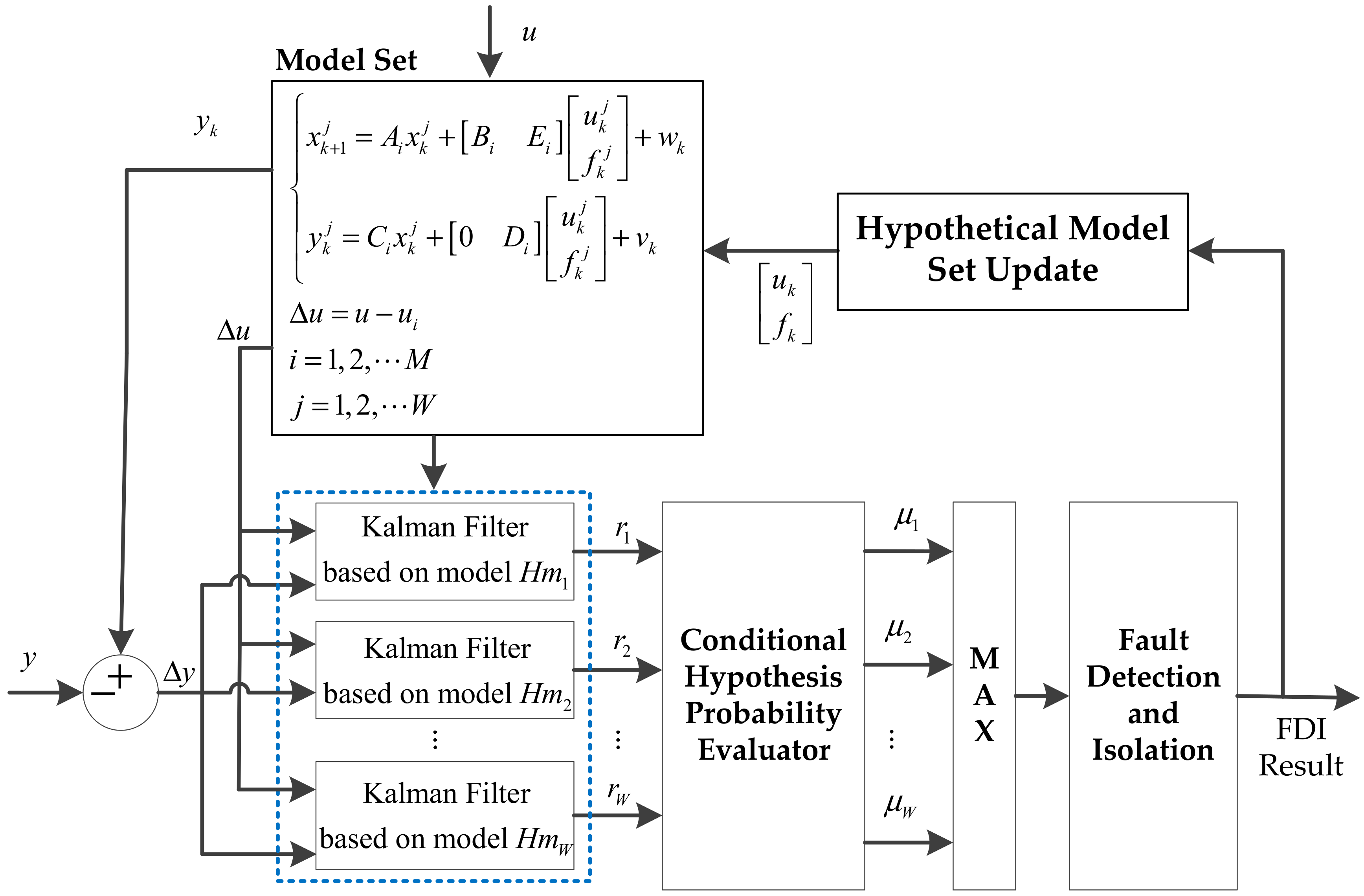
2.2. Model Conditional Filtering
2.3. Model Probability Update
2.4. Fault Detection and Isolation
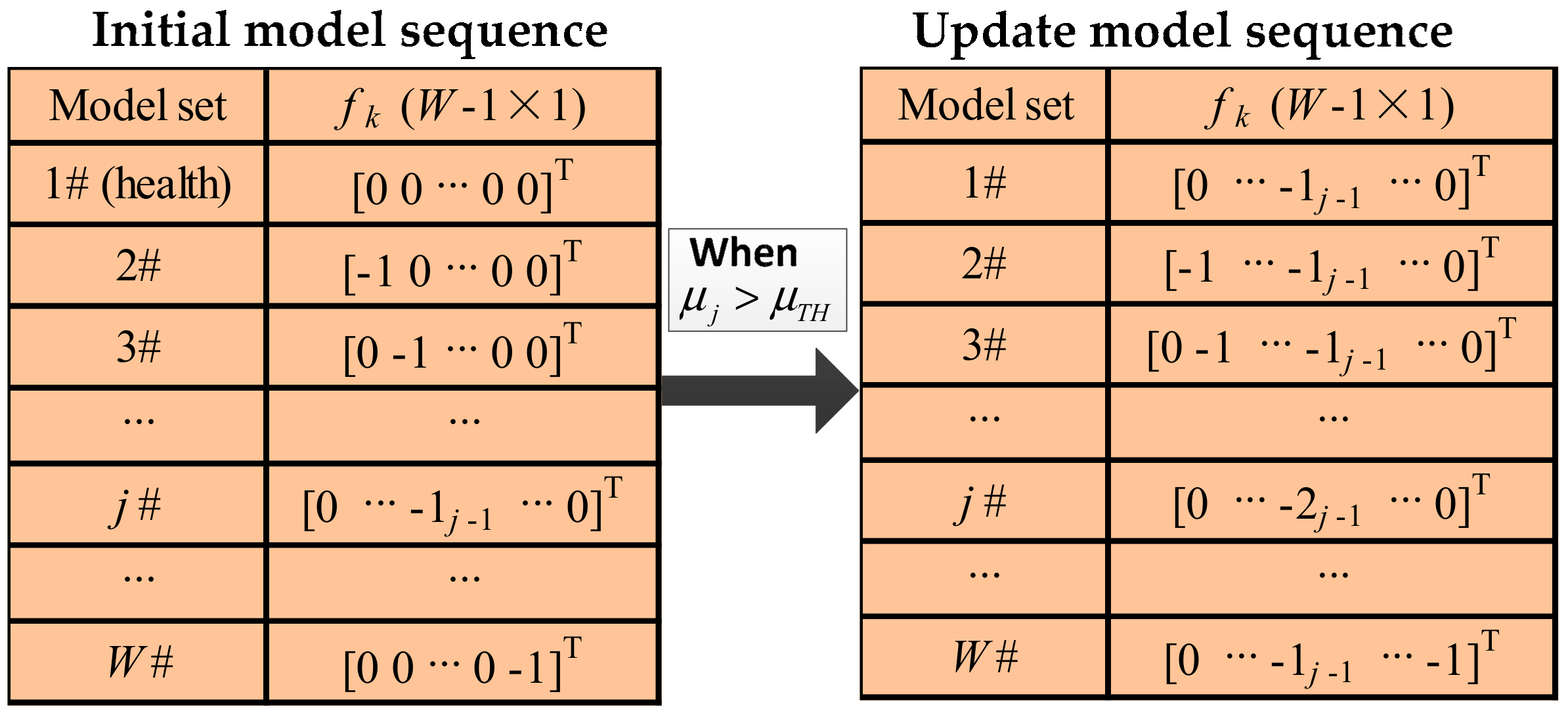
2.5. Hypothetical Model Update
2.6. Implementation of FCM Based MM-FDI
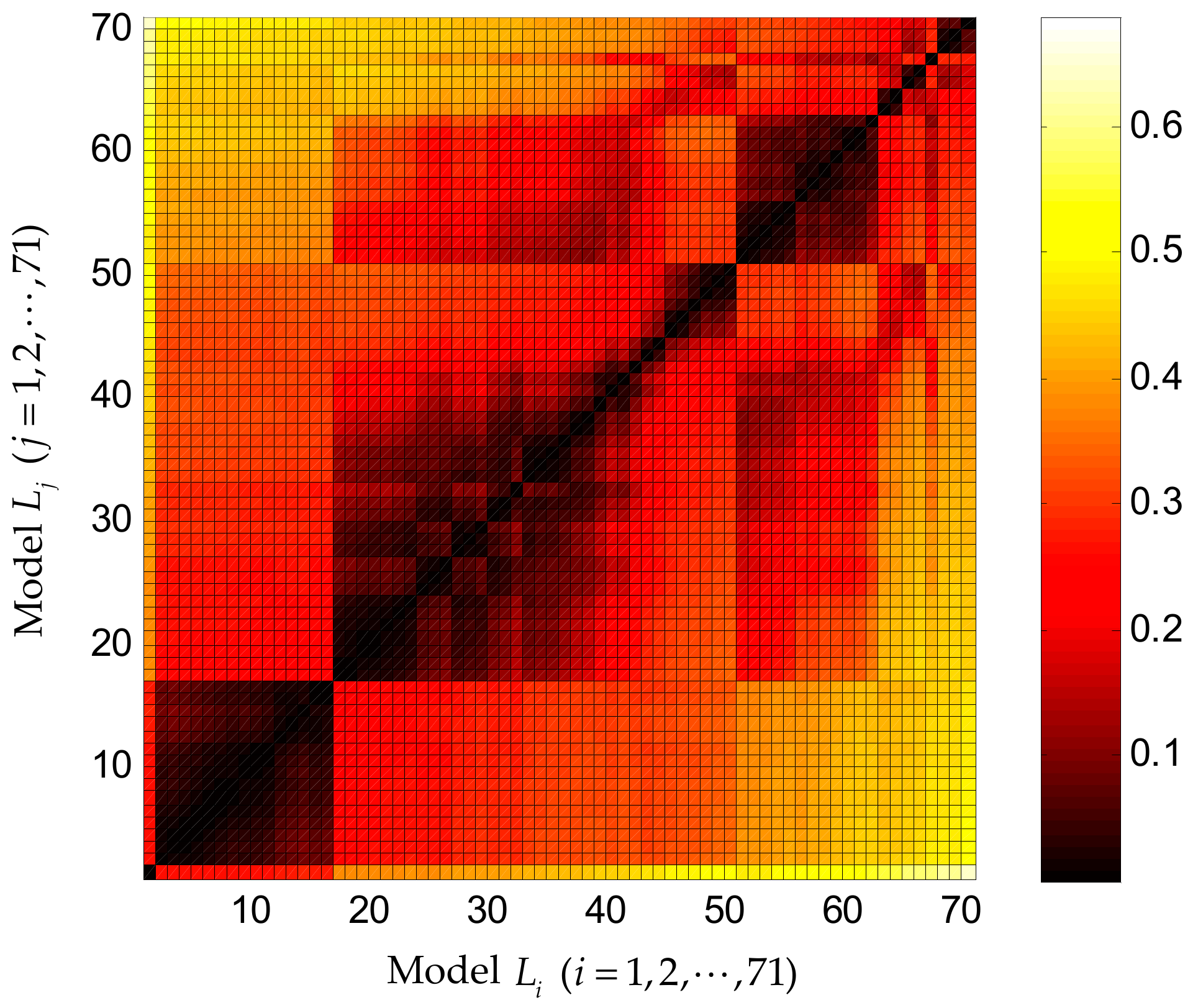
3. Selecting Operating Points Based on Gap Metric Analysis
4. Simulation Results and Discussion
4.1. FCM Based Model Set Testing
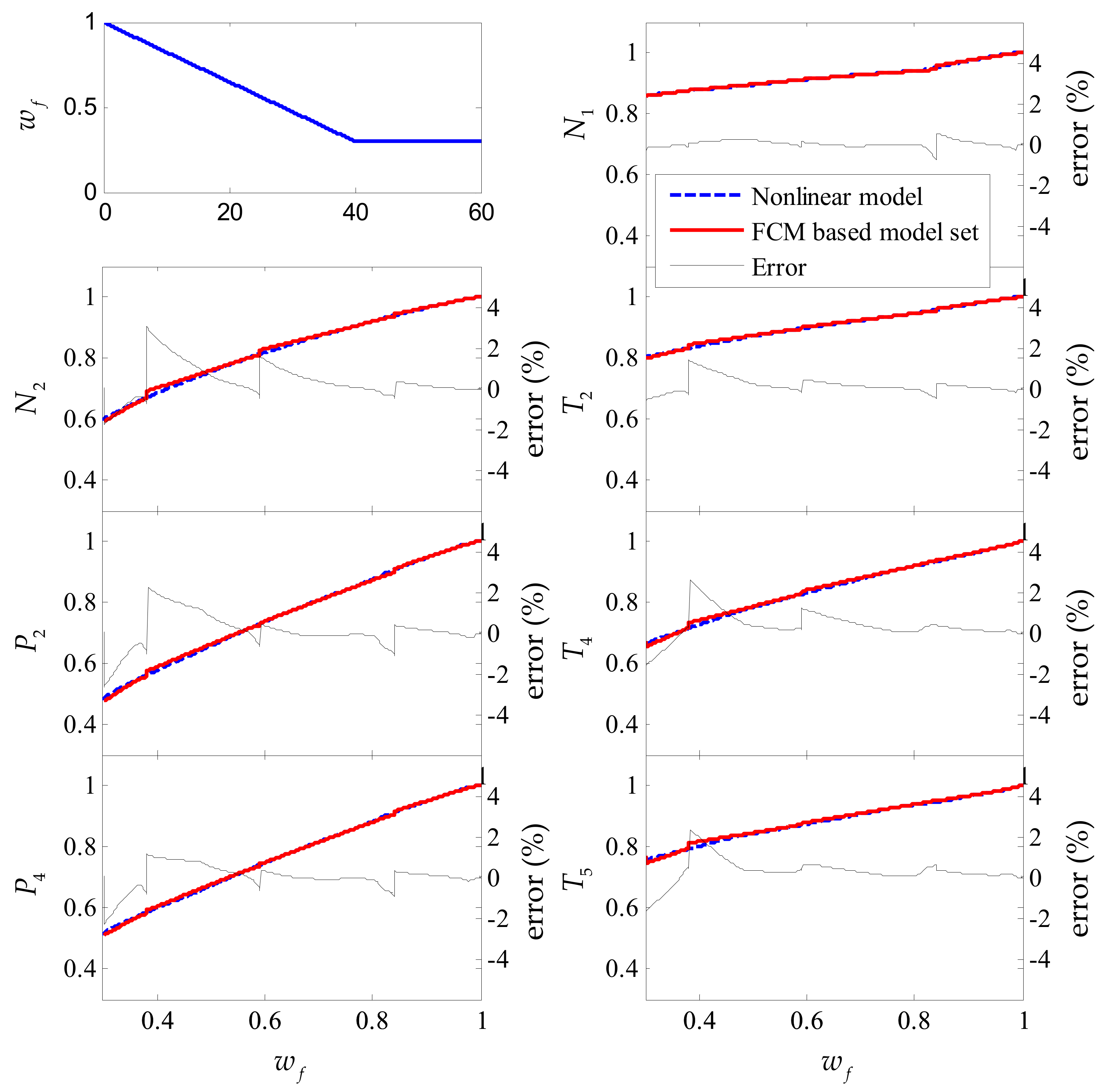
4.1.1. Mode Set Accuracy Testing
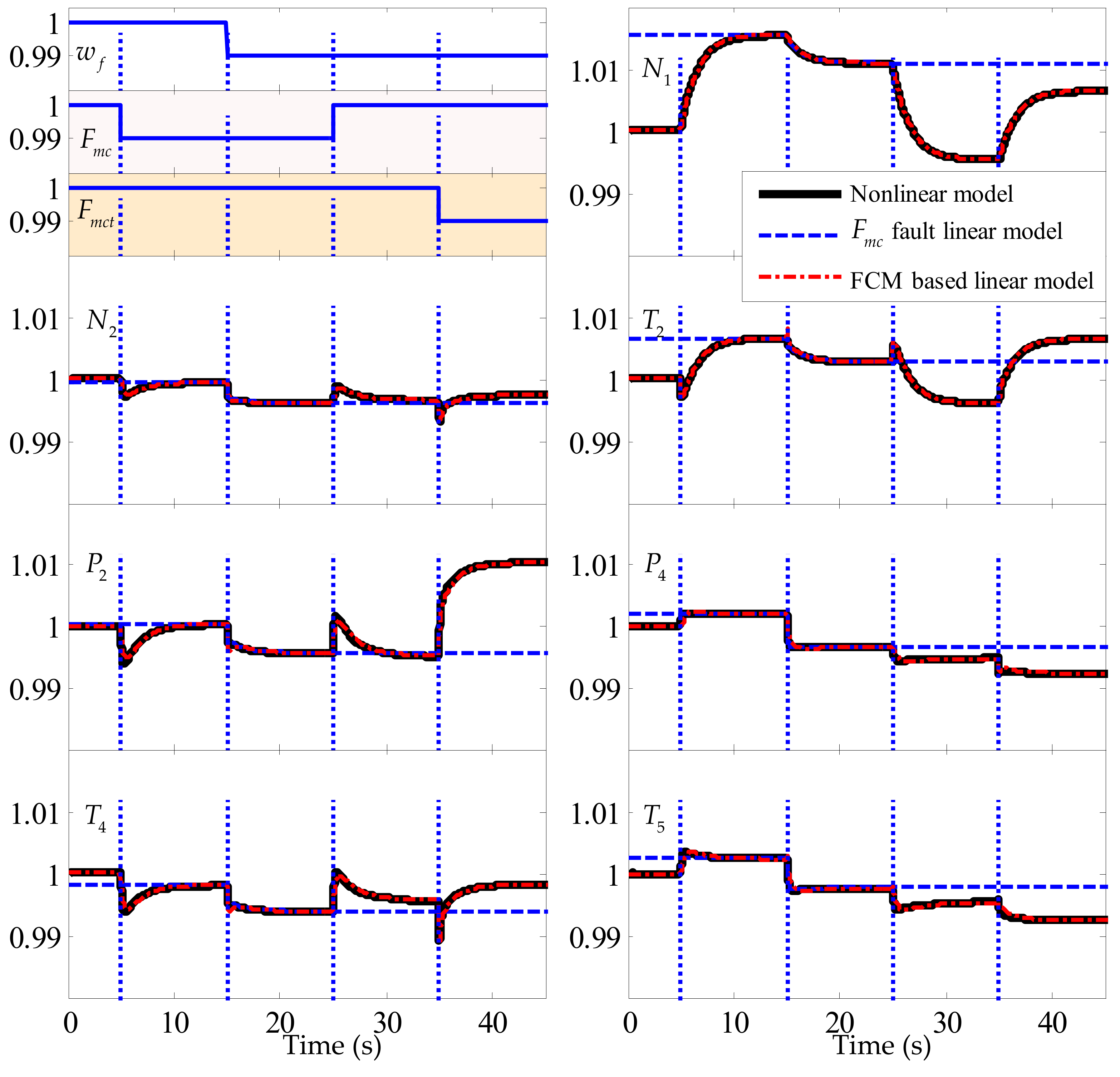
4.1.2. Hypothetical Fault Simulation
4.2. Single Fault Scenarios
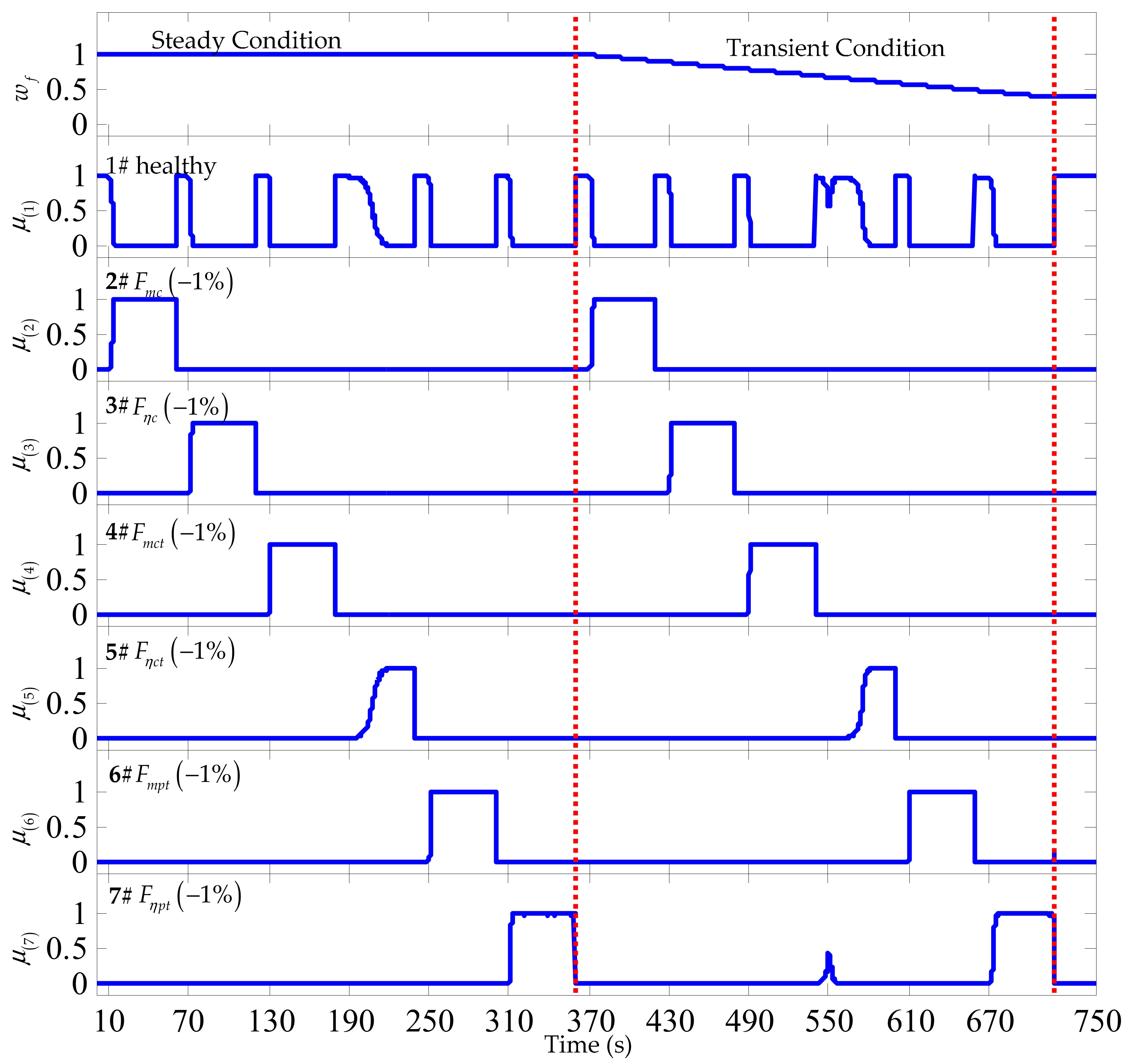
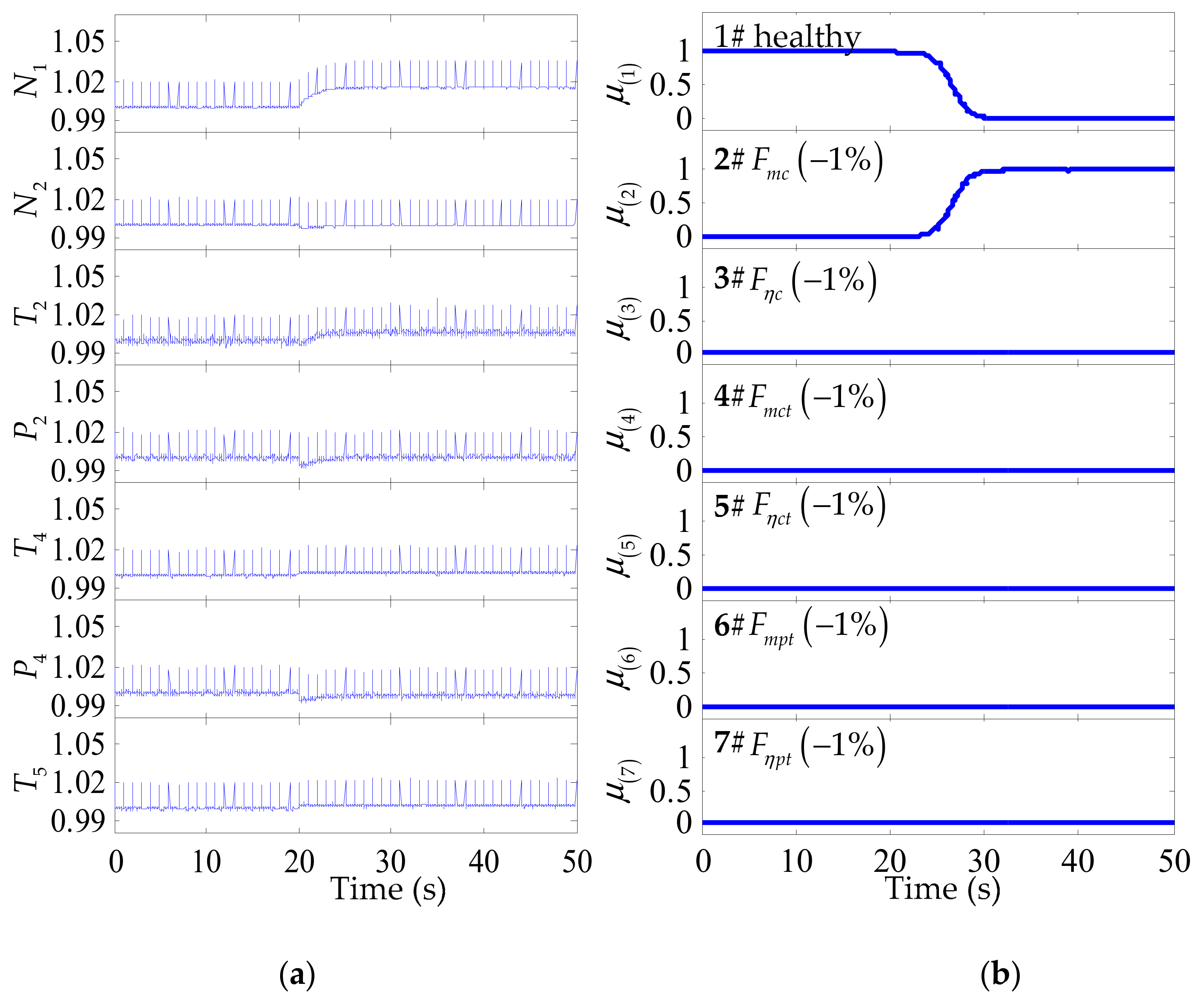
4.2.1. FDI Results of a Single Fault under Different Operating Conditions
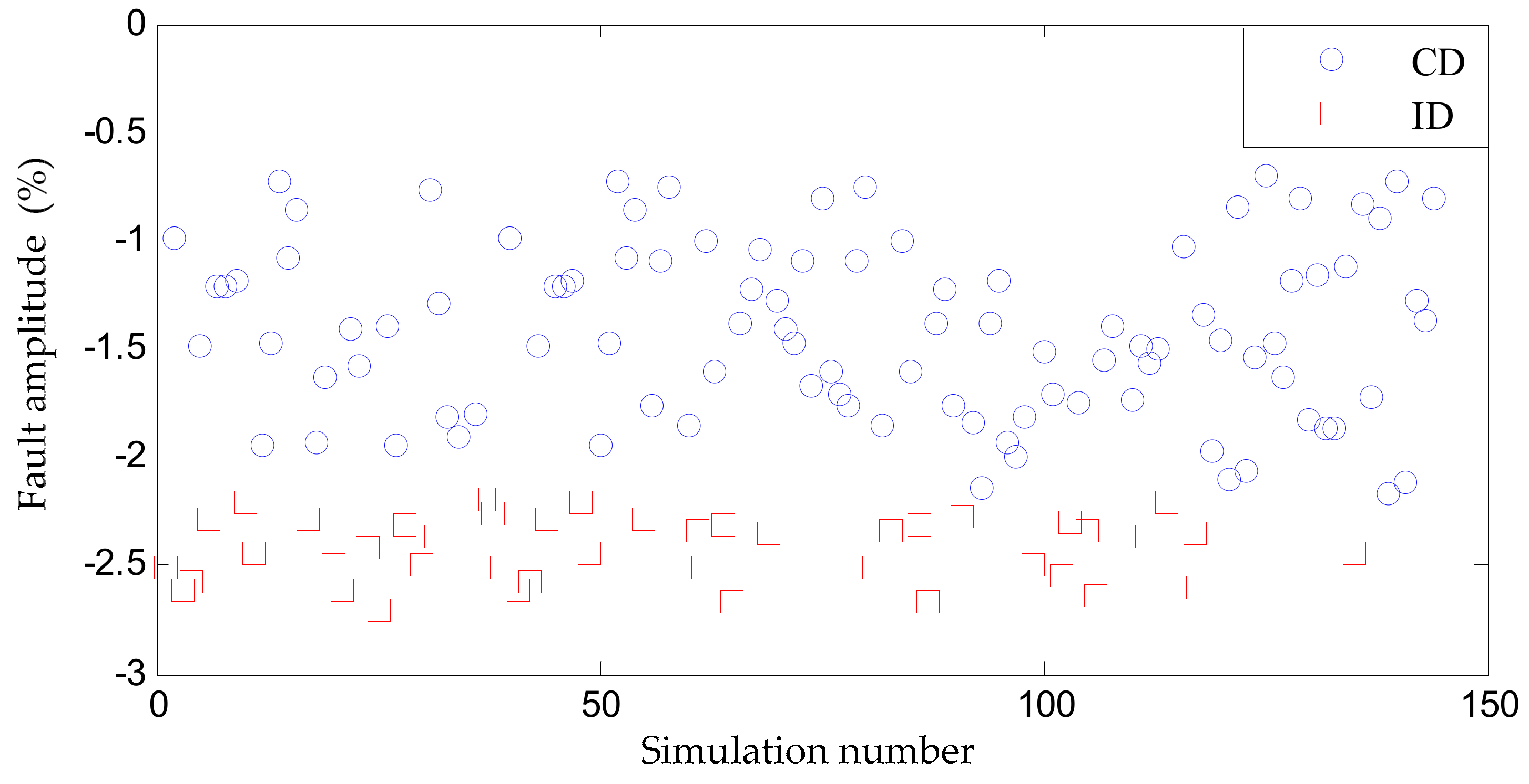
4.2.2. Performance under Different Single Fault Amplitudes
4.2.3. Performance under Different Numbers of Available Sensors
4.2.4. Performance under Measurement Outliers
4.3. Multiple Fault Scenarios
4.3.1. FDI Results of Multiple Faults in the Gas Path
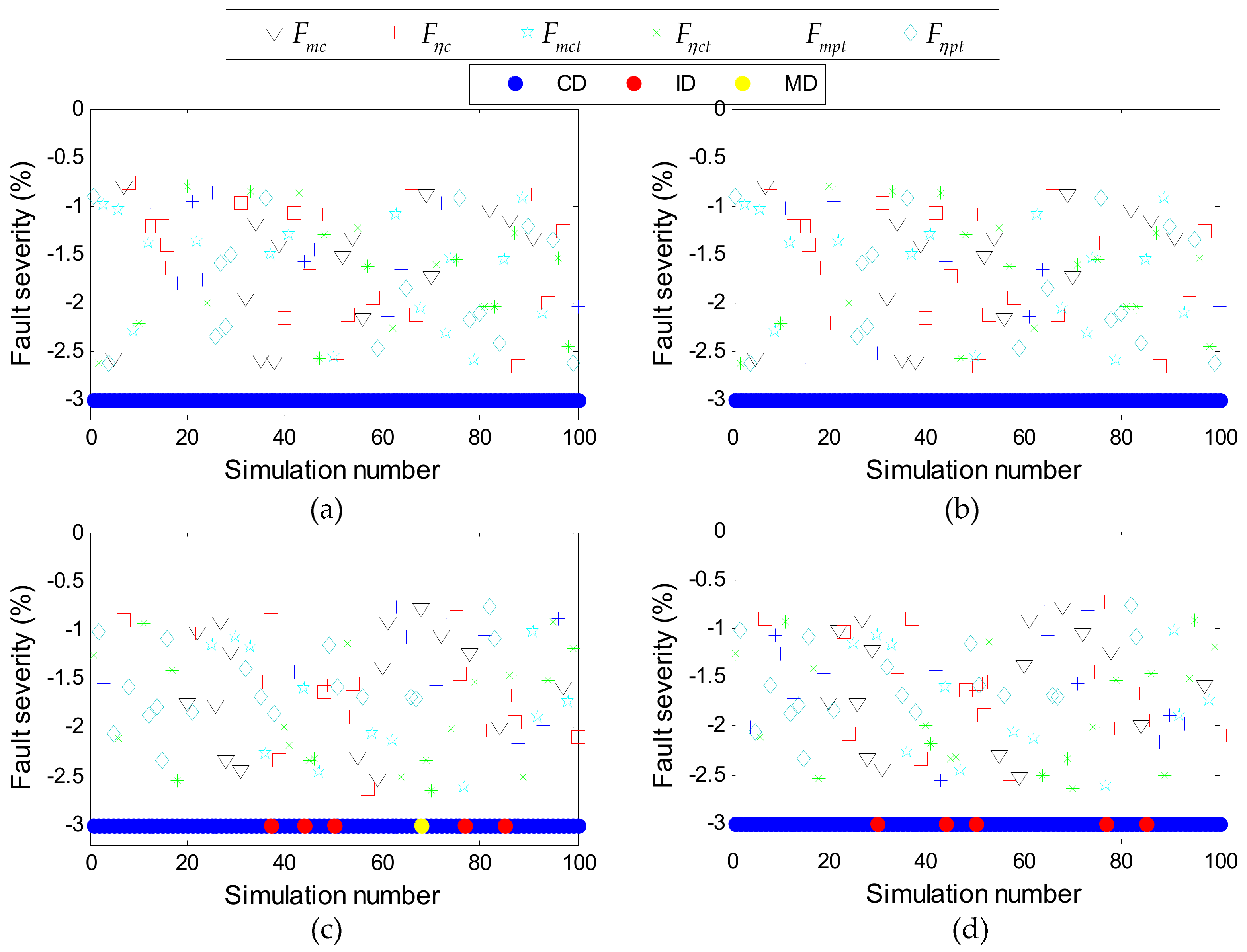
4.3.2. Performance under Multiple Faults
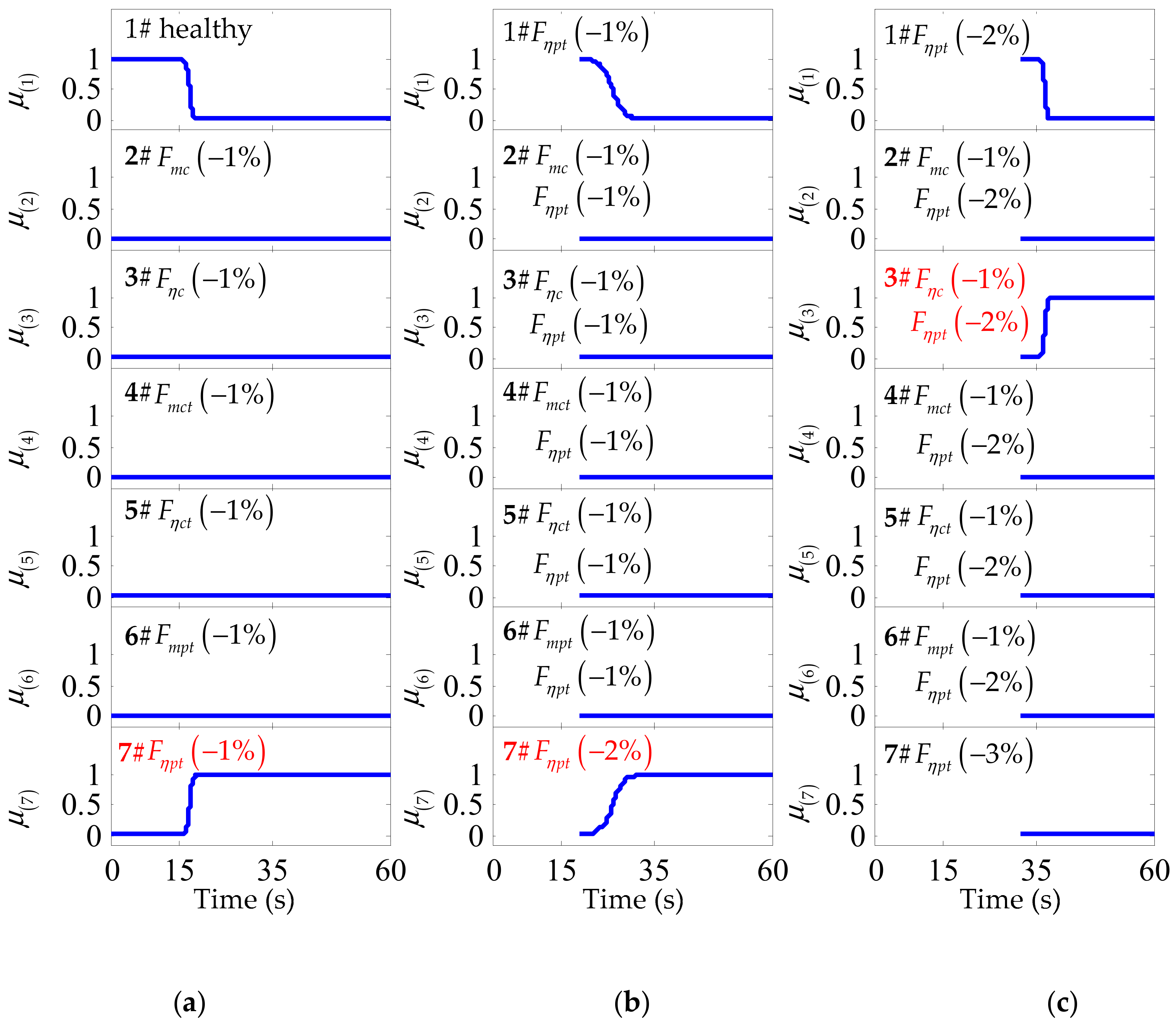
4.3.3. FDI Results of Multiple Faults in both the Actuator and Gas Path
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | |
| state matrix of the healthy condition at the operating point i | |
| state matrix of a gas path fault condition at the operating point i | |
| control matrix of the healthy condition at the operating point i | |
| control matrix of a gas path fault condition at the operating point i | |
| output matrix of the healthy condition at the operating point i | |
| output matrix of a gas path fault condition at the operating point i | |
| gas path fault contribution matrix for the output vector | |
| gas path fault contribution matrix for the state vector | |
| the gap metric matrix of all linearized models | |
| the i-th hypothetical model | |
| inertia of shaft | |
| Kalman gain | |
| the i-th linear model | |
| the normalized right coprime factorizations of linear model Li | |
| rotational speed | |
| pressure | |
| process noise covariance | |
| measurement noise covariance for FDI | |
| gas constant | |
| innovation covariance | |
| temperature | |
| component volume | |
| the number of hypothetical models | |
| fault amplitude | |
| air constant pressure specific heat | |
| gas constant pressure specific heat | |
| gas constant volume specific heat | |
| gas path fault vector | |
| adiabatic index | |
| the dimension of the measurement vector | |
| gas/air mass flow of component | |
| the dimension of the state vector | |
| number of gas path faults | |
| fault amplitude changes during model set updating | |
| the dimension of the control vector | |
| control vector | |
| measurement noise | |
| process noise | |
| fuel mass flow | |
| state vector | |
| measurements vector | |
| fault location vector | |
| Greek | |
| Γ | coefficient between mass flow and pressure |
| coefficient between N2 and load | |
| filter innovation | |
| gap metric between linear models Li and Lj | |
| the preset threshold of the gap metric | |
| isentropic efficiency | |
| the preset threshold of the conditional probability | |
| the conditional probability of the i-th hypothetical model | |
| the interval between any two adjacent operating points | |
| Subscript | |
| compressor | |
| combustion chamber | |
| compressor turbine | |
| health condition | |
| power turbine | |
| discrete time k | |
References
- Volponi, A.J. Gas Turbine Engine Health Management: Past, Present, and Future Trends. J. Eng. Gas Turbines Power 2014, 136. [Google Scholar] [CrossRef]
- Zwebek, A.; Pilidis, P. Degradation Effects on Combined Cycle Power Plant Performance—Part I: Gas Turbine Cycle Component Degradation Effects. J. Eng. Gas Turbines Power 2003, 125, 651. [Google Scholar] [CrossRef]
- Lu, P.-J.; Zhang, M.-C.; Hsu, T.-C.; Zhang, J. An Evaluation of Engine Faults Diagnostics Using Artificial Neural Networks. J. Eng. Gas Turbines Power 2001, 123, 340–346. [Google Scholar] [CrossRef]
- Ogaji, S.; Sampath, S.; Singh, R.; Probert, D. Novel approach for improving power-plant availability using advanced engine diagnostics. Appl. Energy 2002, 72, 389–407. [Google Scholar] [CrossRef]
- Ogaji, S.O.T.; Singh, R. Gas path fault diagnosis framework for a three-shaft gas turbine. Proc. Inst. Mech. Eng. Part A J. Power Energy 2003, 217, 149–157. [Google Scholar] [CrossRef]
- Campora, U.; Cravero, C.; Zaccone, R. Marine gas turbine monitoring and diagnostics by simulation and pattern recognition. Int. J. Naval Archit. Ocean Eng. 2018, 10, 617–628. [Google Scholar] [CrossRef]
- Li, Y.G.; Korakiantis, T. Nonlinear Weighted-Least-Squares Estimation Approach for Gas-Turbine Diagnostic Applications. J. Propuls. Power 2011, 27, 337–345. [Google Scholar] [CrossRef]
- Zedda, M.; Singh, R. Gas Turbine Engine and Sensor Fault Diagnosis Using Optimization Techniques. J. Propuls. Power 2002, 18, 1019–1025. [Google Scholar] [CrossRef]
- Pu, X.; Liu, S.; Jiang, H.; Yu, D. Adaptive gas path diagnostics using strong tracking filter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 577–585. [Google Scholar] [CrossRef]
- Lu, F.; Huang, J.; Lv, Y. Gas Path Health Monitoring for a Turbofan Engine Based on a Nonlinear Filtering Approach. Energies 2013, 6, 492–513. [Google Scholar] [CrossRef]
- Chang, X.; Huang, J.; Lu, F.; Sun, H. Gas-Path Health Estimation for an Aircraft Engine Based on a Sliding Mode Observer. Energies 2016, 9, 598. [Google Scholar] [CrossRef]
- Gupta, S.; Ray, A.; Sarkar, S.; Yasar, M. Fault detection and isolation in aircraft gas turbine engines. Part 1: Underlying concept. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 307–318. [Google Scholar] [CrossRef]
- Abbasi Nozari, H.; Aliyari Shoorehdeli, M.; Simani, S.; Dehghan Banadaki, H. Model-based robust fault detection and isolation of an industrial gas turbine prototype using soft computing techniques. Neurocomputing 2012, 91, 29–47. [Google Scholar] [CrossRef]
- Sadough Vanini, Z.N.; Khorasani, K.; Meskin, N. Fault detection and isolation of a dual spool gas turbine engine using dynamic neural networks and multiple model approach. Inf. Sci. 2014, 259, 234–251. [Google Scholar] [CrossRef]
- Sina Tayarani-Bathaie, S.; Khorasani, K. Fault detection and isolation of gas turbine engines using a bank of neural networks. J. Process Control 2015, 36, 22–41. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar] [CrossRef]
- Magill, D.T. Optimal adaptive estimation of sampled stochastic processes. IEEE Trans. Autom. Control 1965, 10, 434–439. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.R. Detection and diagnosis of sensor and actuator failures using IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1293–1313. [Google Scholar] [CrossRef]
- Menke, T.E.; Maybeck, P.S. Sensor/actuator failure detection in the Vista F-16 by multiple model adaptive estimation. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 1218–1229. [Google Scholar] [CrossRef]
- Eide, P.; Maybeck, P. An MMAE failure detection system for the F-16. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1125–1136. [Google Scholar] [CrossRef]
- Hanlon, P.D.; Maybeck, P.S. Multiple-model adaptive estimation using a residual correlation Kalman filter bank. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 393–406. [Google Scholar] [CrossRef]
- Maybeck, P.S. Multiple model adaptive algorithms for detecting and compensating sensor and actuator/surface failures in aircraft flight control systems. Int. J. Robust Nonlinear Control 1999, 9, 1051–1070. [Google Scholar] [CrossRef]
- Naderi, E.; Meskin, N.; Khorasani, K. Nonlinear Fault Diagnosis of Jet Engines by Using a Multiple Model-Based Approach. J. Eng. Gas Turbines Power 2011, 134, 011602. [Google Scholar] [CrossRef]
- Meskin, N.; Naderi, E.; Khorasani, K. A Multiple Model-based Approach for Fault Diagnosis of Jet Engines. IEEE Trans. Control Syst. Technol. 2013, 21, 254–262. [Google Scholar] [CrossRef]
- Pourbabaee, B.; Meskin, N.; Khorasani, K. Sensor Fault Detection, Isolation, and Identification Using Multiple-Model-Based Hybrid Kalman Filter for Gas Turbine Engines. IEEE Trans. Control Syst. Technol. 2016, 24, 1184–1200. [Google Scholar] [CrossRef]
- Pagán Rubio, J.A.; Vera-García, F.; Hernandez Grau, J.; Muñoz Cámara, J.; Albaladejo Hernandez, D. Marine diesel engine failure simulator based on thermodynamic model. Appl. Therm. Eng. 2018, 144, 982–995. [Google Scholar] [CrossRef]
- Espana, M. On the estimation algorithm for adaptive performance optimization ofturbofan engines. In 29th Joint Propulsion Conference and Exhibit; Joint Propulsion Conferences; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1993. [Google Scholar]
- Ru, J.; Rong Li, X. Variable-Structure Multiple-Model Approach to Fault Detection, Identification, and Estimation. IEEE Trans. Control Syst. Technol. 2008, 16, 1029–1038. [Google Scholar] [CrossRef]
- Syverud, E.; Brekke, O.; Bakken, L.E. Axial compressor deterioration caused by saltwater ingestion. J. Turbomach. 2005, 129, 119–126. [Google Scholar] [CrossRef]
- Kurz, R.; Brun, K.; Wollie, M. Degradation Effects on Industrial Gas Turbines. J. Eng. Gas Turbines Power 2009, 131, 062401. [Google Scholar] [CrossRef]
- Rewienski, M.; White, J. A Trajectory Piecewise-Linear Approach to Model Order Reduction and Fast Simulation of Nonlinear Circuits and Micromachined Devices. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2003, 22, 155–170. [Google Scholar] [CrossRef]
- Lin, M.-H.; Tsai, J.-F. Range reduction techniques for improving computational efficiency in global optimization of signomial geometric programming problems. Eur. J. Oper. Res. 2012, 216, 17–25. [Google Scholar] [CrossRef]
- El-Sakkary, A. The gap metric: Robustness of stabilization of feedback systems. IEEE Trans. Autom. Control 1985, 30, 240–247. [Google Scholar] [CrossRef]
- Georgiou, T.T.; Smith, M.C. Optimal Robustness in the Gap Metric. IEEE Trans. Autom. Control 1990, 35, 673–686. [Google Scholar] [CrossRef]
- Yang, Q.; Li, S.; Cao, Y. A new component map generation method for gas turbine adaptation performance simulation. J. Mech. Sci. Technol. 2017, 31, 1947–1957. [Google Scholar] [CrossRef]
- Camporeale, S.M.; Fortunato, B.; Mastrovito, M. A Modular Code for Real Time Dynamic Simulation of Gas Turbines in Simulink. J. Eng. Gas Turbines Power 2006, 128, 506. [Google Scholar] [CrossRef]
- Yu, H.; Yuecheng, Y.; Shiying, Z.; Zhensheng, S. Comparison of linear models for gas turbine performance. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1291–1301. [Google Scholar] [CrossRef]
- Deshpande, A.P.; Zamad, U.; Patwardhan, S.C. Online Sensor/Actuator Failure Isolation and Reconfigurable Control Using the Generalized Likelihood Ratio Method. Ind. Eng. Chem. Res. 2009, 48, 1522–1535. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 1: Determine the type and number of the detected faults |
| Step 2: Determine the matrix Fupdate corresponding to the updated hypothetical model set |
| Step 3: Substituting each column of Fupdate into Equation (4) to obtain the updated mode set |
| Notation |
| μ denotes the conditional probability of the W hypothetical models, a 1 × W vector; matrix; matrix; s denotes the fault amplitude changes during model set updating, s = −1. |
| Fault Description | Symbol | Fault Vector |
|---|---|---|
| Healthy condition | ||
| Measurement Parameters | N1 | N2 | T2 | P2 | T4 | P4 | T5 |
|---|---|---|---|---|---|---|---|
| Standard deviation (%) | 0.051 | 0.051 | 0.23 | 0.164 | 0.097 | 0.164 | 0.097 |
| Models | 1# | 2# | 3# | 4# | 5# | 6# |
|---|---|---|---|---|---|---|
| i | 1 | 2 | 17 | 42 | 63 | 71 |
| wf | 1 | 0.99 | 0.84 | 0.59 | 0.38 | 0.3 |
| Confusion Matrix of the FDI Result | Final Result | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| H | Fmc | Fηc | Fmct | Fηct | Fmpt | Fηpt | CD | ID | MD | |
| H | 135 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| Fmc | 0 | 123 | 0 | 0 | 0 | 0 | 0 | 95.5% | 0.45% | 0 |
| Fηc | 0 | 0 | 152 | 0 | 0 | 0 | 0 | |||
| Fmct | 0 | 0 | 0 | 121 | 0 | 0 | 0 | |||
| Fηct | 0 | 0 | 0 | 0 | 153 | 0 | 0 | |||
| Fmpt | 0 | 0 | 0 | 0 | 0 | 171 | 0 | |||
| Fηpt | 0 | 45 | 0 | 0 | 0 | 0 | 145 | |||
| Fault Type | Seven Sensors | Four Sensors | Two Sensors | |||
|---|---|---|---|---|---|---|
| td (s) | ti (s) | td (s) | ti (s) | td (s) | ti (s) | |
| Fmc | 1.46 | 5.02 | 4.8 | 17.65 | 223 | 1009 |
| Fηc | 0.9 | 3.68 | 4.78 | 51.4 | MD/ID | MD/ID |
| Fmct | 0.28 | 0.9 | 0.7 | 5.02 | 912 | 3739 |
| Fηct | 4.32 | 17.9 | 2.92 | 62.8 | MD/ID | MD/ID |
| Fmpt | 0.34 | 1.2 | 5.12 | 25.7 | MD/ID | MD/ID |
| Fηpt | 0.54 | 1.8 | 2.08 | 8.5 | 22.5 | 116.2 |
| Fault Change | Faults | Simulation Times | FDI Result | ||
|---|---|---|---|---|---|
| CD | ID | MD | |||
| Abrupt | First fault | 100 | 100 | 0 | 0 |
| Second fault | 100 | 94 | 5 | 1 | |
| Total | 100 | 94 | 5 | 1 | |
| Gradual | First fault | 100 | 100 | 0 | 0 |
| Second fault | 100 | 95 | 5 | 0 | |
| Total | 100 | 95 | 5 | 0 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Li, S.; Cao, Y.; Gu, F.; Smith, A. A Gas Path Fault Contribution Matrix for Marine Gas Turbine Diagnosis Based on a Multiple Model Fault Detection and Isolation Approach. Energies 2018, 11, 3316. https://doi.org/10.3390/en11123316
Yang Q, Li S, Cao Y, Gu F, Smith A. A Gas Path Fault Contribution Matrix for Marine Gas Turbine Diagnosis Based on a Multiple Model Fault Detection and Isolation Approach. Energies. 2018; 11(12):3316. https://doi.org/10.3390/en11123316
Chicago/Turabian StyleYang, Qingcai, Shuying Li, Yunpeng Cao, Fengshou Gu, and Ann Smith. 2018. "A Gas Path Fault Contribution Matrix for Marine Gas Turbine Diagnosis Based on a Multiple Model Fault Detection and Isolation Approach" Energies 11, no. 12: 3316. https://doi.org/10.3390/en11123316
APA StyleYang, Q., Li, S., Cao, Y., Gu, F., & Smith, A. (2018). A Gas Path Fault Contribution Matrix for Marine Gas Turbine Diagnosis Based on a Multiple Model Fault Detection and Isolation Approach. Energies, 11(12), 3316. https://doi.org/10.3390/en11123316