Due to the nonlinear equality constraints in (5a), OPF is a nonlinear and nonconvex program problem which is hard to find the global optimal solution. To make OPF solvable in polynomial time and the optimal operation point found, we change OPF problem into a convex optimization format. In this part, we aim to solve OPF problem (
9) through two steps of relaxations. After the fist step, the current variables in OPF problem will be wade away. In the second step, the quadric equations will be relaxed with SOCP relaxations. The OPF problem can be solved thus by convex optimizations and the global optimum can be obtained successfully. The structure of this section is summarized in
Figure 2.
3.1. First Step
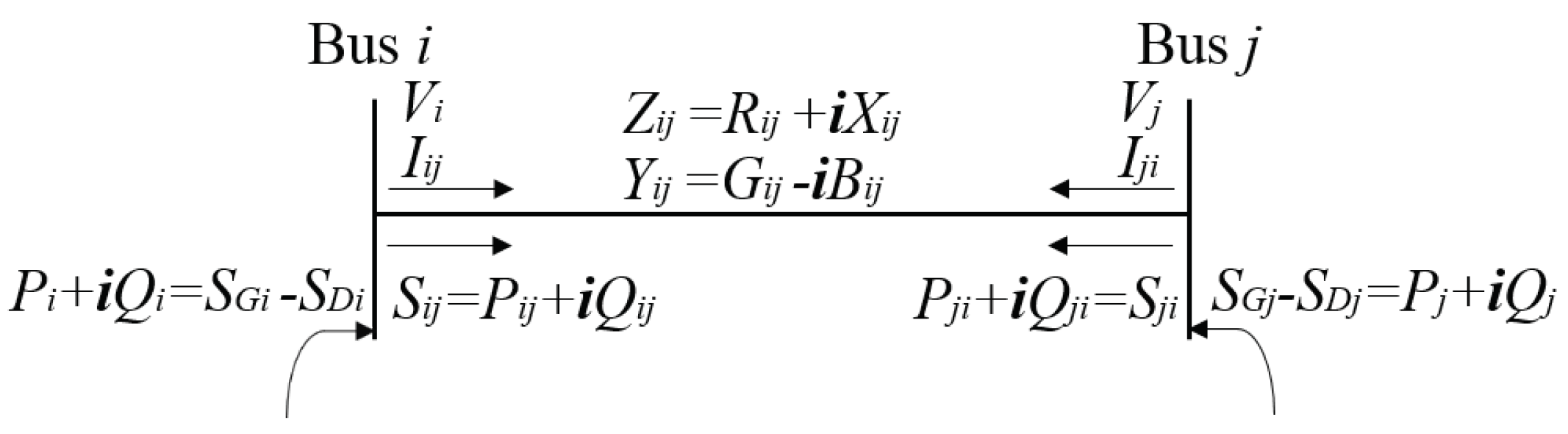
The first step of relaxation is to handle with the current variables. By eliminating the current variables, the non-convexitiy in power flow constraints (5a) will be changed. In the transformation, we introduce the variables
and
at the same time for a transmission line
.
denotes the direction of current form
i to
j and
denotes the power transformed form
j to
i. Please note that on the transmission line
, the current from
i to
j equals to the value of
. However, due to the voltage difference, the transmission power
does not equal to
. By eliminating the variables
and
, the power flow formulation becomes:
We define the variables as:
where
and
. Through the transformation, the following power flow formula can be obtained by substituting variables:
where
.
With the transformation, there is relationship for the voltage of each line. It can be shown as:
Equation (12) together with (13) is the new power flow constraints that indicate the current, voltage and power balance in each branch of a power system topology. It is the power flow constraints instead of the (5).
From Equation (12) above, we can see that and exist at the same time. For a convex optimization problem, all the equality constraints should be affine, the objective functions and inequality constraints should be convex functions. The Equation (12b) combining with (12c) together are no longer affine functions due to the non-affine relationship between and . Therefore we change the power flow constraints in the real number filed and replace and with new variables in real number field.
Below we decouple the active and reactive power, real and imaginary parts of voltage and current totally; the complex problem is changed into a real convex problem. More details about convex optimization can be seen in [
28]. The active and reactive power balance equation can be described as
where
and
.
and
are always equal or larger than zero. The equations above means the total power of node
i is the sum power of all connecting branches. The real and imaginary part of
is defined as
and
. That is to say,
Then the relations of
,
,
,
can be shown as follows:
The Equation (
13) can be represented as
because of (
15).
Since there are no more variables as in the power flow constraints, the objective functions should be reformulated correspondingly.
For (
4), the power loss of
can be represented with the sum of
and
. The active power loss is consumed by the resistance of the line. For
here, we can describe as
The objective function (
4) can be shown as:
where
The objective function is concerned with the active power of each line which can be written as:
where
P refers to
. It should be noted the objective functions here can get the same value of (
4). For the voltage constraint, it will be for the new variables
instead of
.
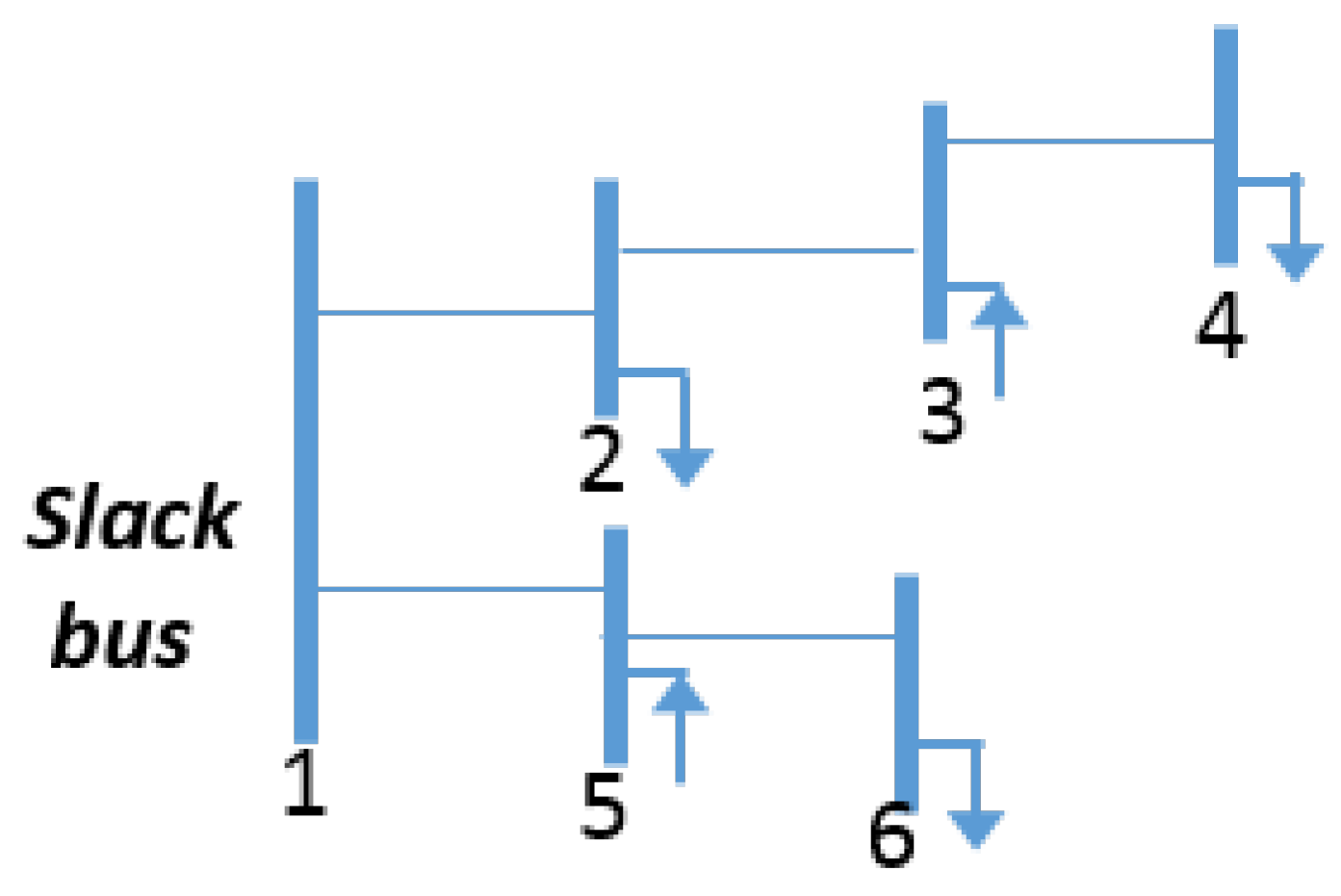
denotes the reference voltage of the slack node.
For the inequality constraints (
8), the constraints for
can be represented with the variables
since
and
is a constant variable. For the line
, the maximum transmission value of
is same as that of
, which both represents the current limit of the line
. The constraints (8) can be represented as:
With the variables
and
, we have the following constraints considering the actual physical meanings.
When the value of is positive, the value of must be negtive and vice versa. The sum of and represents the power loss of the transmission line which should be positive.
After the first step of relaxation, the relaxed OPF problem is like this:
The objective functions
in a convex function of variables. The equality constraints (14a)–(14b) and (16a)–(16d) are totally linear and affine and in a simple form. The equality constraints (
17) are in quadratic form. The inequality constraints (6), (21), (22) and (23) are all convex. Besides all the variables are in real format. To make this problem a convex optimization, we need to do with the non-affine equality constraints (
17). This will be done in the next step.
3.3. Relaxation Discussions
It is (27) that is the final presenting form in this paper. It is in a standard convex optimization format, which ensures global optimality. The objective function considering power loss and current margins here are linear independent with variables and . In addition, the generators’ cost objective is a convex function with variables . Therefore, it is regarded as a convex objective function in OPF problem. The nonconvexity in the power flow constraints changes into convex constraints after two steps of relaxations. Then, all the variables above are in , the equality constraints are in affine format, and the inequality constraints are convex functions. From the formulation, we can know that the optimization problem is about variables and are the intermediate variables.
Compared with the SDP relaxation method mentioned in [
20], we transform the positive semidefinite matrix of the voltage into some
ones, the number of which depend on branches’ amount. We improve the operational efficiency this way. Furthermore, with the bus injection model adding branch variables, we make the current margin as a part of objective functions under thermal stability consideration. The optimal solution of this objective function will leave enough margins to branches and contribute to the power system’s stable operation. Compared with the SOCP relaxation method proposed in the branch flow model in [
21], we do not use the current variables in the model. Instead, we use voltage variables. In addition, for each branch, we focus on the branch itself. In branch flow OPF, when building up model for node
i, it regulates the direction of transmission such as
and
. In the above method, we split the power system with nodes and there is no need to regulate the transforming direction for the branches.
The OPF solutions of voltage U can be recovered from square root calculations of and division operations of . With the solutions of , we present the following Algorithm 1 to recover voltage of each node. In this algorithm, we first make the value of equal to and initialize the set with number 0. When the set is not equal to the set , the algorithm runs into the loop. In this loop, we will get the voltage value of the node and update the at the same time. When the set is same as the set , the loop will end.
| Algorithm 1: Recover U from , and |
| Input:() that satisfies Lemma 1 |
| Output:U |
| 1. ←; |
| 2. ← 0; |
| 3. while do |
| find that and ; |
| compute ; |
| j; |
| end while |
Lemma 1. Letfor, letand for .
If 1.for;
2. is nonzero for ;
3. ;
then the above algorithm computes the uniquethat satisfies Proof of Lemma 1. We will proof this with the recursive algorithm. The total recursive time is denoted by the postive interger T. Let t indicate the recursive time where . Let , represent the set after the t recursion.
In the algorithm, for node 0 we simplify name one of the nodes connecting to it with number 1. When
, it is easy to know:
Because of Algorithm 1, it can be obtained:
It satisfies (28a) naturally due to (30a). Combining (29) and (30b) together, we will get the following equations:
It satisfies (28b) and (28c) at the same time. Therefore, Lemma 1 is satisfied for node 0 and the branch connecting to node 0. Assume Lemma 1 holds for the node
k and the branch
after the
t recursion where
. Therefore for one of the nodes connecting to
k which is denoted as
and
, we can know:
Similarly, applying Algorithm 1 in the
recursion, we can get:
Combining (32) and (33), we can get
(28) is satisfied for the node and the connecting branch . Therefore, Lemma 1 holds for recursion. This completes the proof that Algorithm 1 computes a U that satisfies (28). □
Please note that such recursion holds on condition that the network topology is radial. In radial networks, introducing a new node will only lead to one new branch. While in mesh networks, a new node introduced will construct more than one branch when the node is in a circle. This makes it no more sufficient in the recursion.
Lemma 1 offers a way to recover the OPF solution of (
9) from the solution of (
27) under the condition that the second step of relaxation is exact.
For constraints, the solution of (
27) with variables
satisfy the equality and inequality constraints in (
27). The Algorithm 1’s recovered variables
can be proved to satisfy the constraints (5)–(8) by putting (28) and (14), (16), (17), (6), (21), (22), (23) into the formula. This implies that when the second step of relaxation is exact, the relaxed OPF constraints can accord with primal OPF constraints equivalently.
For objective functions in (9) and (27), we can get some
here. In the first step of relaxation above, we can see the first step is done by introducing variables
and
satisfying
and
. With each
and
, we can get the corresponding
,
and
. Thus,
Due to Lemma 1, with Algorithm 1 we can recover
and
. Subsequently,
Since solving (27) gets a global optimal solution of , the recovered solution will be the global optimum of . Therefore, the recovered solution of relaxed OPF in Algorithm 1 is the optimal solution of OPF problem.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}