1. Introduction
Based on environmental and economic concerns, the deployment of BEVs has increased significantly in recent years [
1,
2,
3,
4]. Compared with traditional gasoline vehicles (GVs), BEVs have many advantages, such as low or no environment emissions, and energy efficiency, to make them an ideal form of transport for urban areas [
5]. Lee and Han [
6] estimated that there will be an annual growth rate of more than 25% for the sales of BEVs by 2025. The popularity of BEVs is not only due to its environmental friendliness, but also due to various incentives provided by governments, such as purchase incentives, free parking, as well as less access restrictions [
7].
Though the benefits of deploying BEVs are undeniable, there is still a barrier for consumers to choose BEVs: Range anxiety [
8]. Range anxiety refers to the fact that BEV drivers fear that their batteries would run out of power en route due to the limited battery power capacity [
9,
10]. This range anxiety makes BEV drivers reluctant to take long journeys. Furthermore, recharging a battery completely takes too much time using current recharging technology. Therefore, some studies proposed many alternative methods to avoid a long recharging time, such as battery-swapping [
11] and charging lanes [
12]. Due to their limited range, the increasing number of BEVs naturally raises the problem of electric charging stations. The insufficient refueling infrastructures pose a threat to the market share of BEVs [
13,
14,
15]. Therefore, to address this situation, the problem of optimal locations for recharging stations is urgent.
Currently, two mainstream approaches of determining optimal locations for recharging stations are applied: Spatial approaches and flow-based approaches. For the former, the objective function is usually assumed to minimize the distance between the location of a recharging station and possible BEV drivers served by this facility [
16]. For example, the p-median approach is one of spatial approaches where a BEV driver will recharge its battery before the power is exhausted by visiting recharging stations, while the aim is to minimize the number of stations and maximize coverage at the same time. Therefore, this method of deploying the location of stations is named as the spatial approach. However, it is impossible for complete coverage across a region, so this method can only be conducted to solve urban transport planning problems [
17]. The second approach inserts recharging stations into traffic routes to make BEV travel each segment with sufficient power and only recharge its battery in each junction between two adjacent segments, which is named as a flow refueling location model (FRLM) by Kuby and Lim [
18]. In general, the approach of FRLM is widely used to deploy charging stations [
18,
19].
These models based on the FRLM pattern presented above need to enumerate all recharging patterns. However, when the number of OD pairs is huge, considering all possible paths is already an enormous challenge; generating all feasible patterns for each path will result in huge batteries even before the calculation of a model. A mathematical formulation was proposed by He et al. [
8] in which the recharging decision variables are embedded. In the same way, in our research, considering the time-consuming nature of path enumeration, we record the charge states of a BEV battery through the variables and equations presented by He et al. [
8], avoiding the full enumeration of paths and recharging patterns.
Furthermore, all previous research on the location problem of charging stations has been based on flow. However, modeling frameworks based on non-atomic and atomic games are different. The traditional flow model with non-atomic players does not show crowding between agents, so the agent-based model is utilized in this paper. In addition, the relevant models for electric vehicles, which need to track their charge levels, are quite different from those of traditional fuel vehicles. Different initial charge levels and anxiety ranges will result in different recharging patterns or even entirely different routes for drivers. However, traditional flow models, such as user equilibrium (UE), stochastic user equilibrium (SUE), and so on, assume that all BEV drivers have the same initial charge level and anxiety range, sometimes assuming different OD pairs have different initial charge levels or anxiety ranges, but they do not reflect the differences between the agents of one OD pair. In reality, there are many people who arrive at the same destination from the same point of departure but with differences in the initial charge levels and anxiety ranges. However, traditional flow models do not reflect these differences, so the agent-based model is a better choice. In this paper, an agent-based refueling location model is proposed to design the location of recharging stations.
Furthermore, recharging time is considered sufficiently in this paper, because when the amount of power reaches 80% of the battery capacity, the recharging rate is significantly reduced [
20]. In some studies, such as Nie and Ghamami [
21], they assumed that the fast-charging devices are deployed to ignore recharging time, but these devices are very expensive and require high voltages, which make large-scale deployment of such charging devices difficult. To avoid high construction costs, multiple types of charging stations with different charging rates were considered by Wang and Lin [
22]. However, in the study, the number of chargers is not studied. In reality, charging stations of different sizes with different numbers of chargers may greatly affect the service efficiency. Therefore, this paper optimizes the combination of charging stations of different sizes under a given total budget. Specifically, recharging time includes three parts, named queue time, fixed charging activity preparation time, and variable charging time related to the amount power recharged and type of charger. The queue time, in this paper, is only a generalized time and just conducted to reflect the difference of charging stations with different numbers of chargers. Specifically, the queue time will reduce with the increase of chargers.
Specifically, this paper investigates the location problem for multiple sizes of BEV charging stations based on agents under a link capacity constraint. Hereafter, our approach is defined as the agent-refueling, multiple-size location problem with capacitated network (ARMSLP-CN). Furthermore, we formulate the ARMSLP-CN as a – MILP with the aim of minimizing the total trip time. To the best of our knowledge, until now, there has been no research focusing on the multiple-size recharging station location problem. The contributions of this paper can be described as follows.
- (1)
The refueling station location problem based on agents is proposed for the first time.
- (2)
We are the first to discuss the multiple-size refueling station location problem with various numbers of chargers.
- (3)
The recharging time based on the amount of energy recharged and the size of the charging stations are considered.
- (4)
We present a linear mathematical formulation for the ARMSLP-CN considering both limited operational ranges and possible recharging strategies.
For the remainder, the problem is formally introduced in
Section 2. The MILP formulation of the ARMSLP-CN is shown in the next section. The computational results and sensitivity analyses are presented and discussed in
Section 4. We conclude the study in
Section 5.
3. Model Formulation
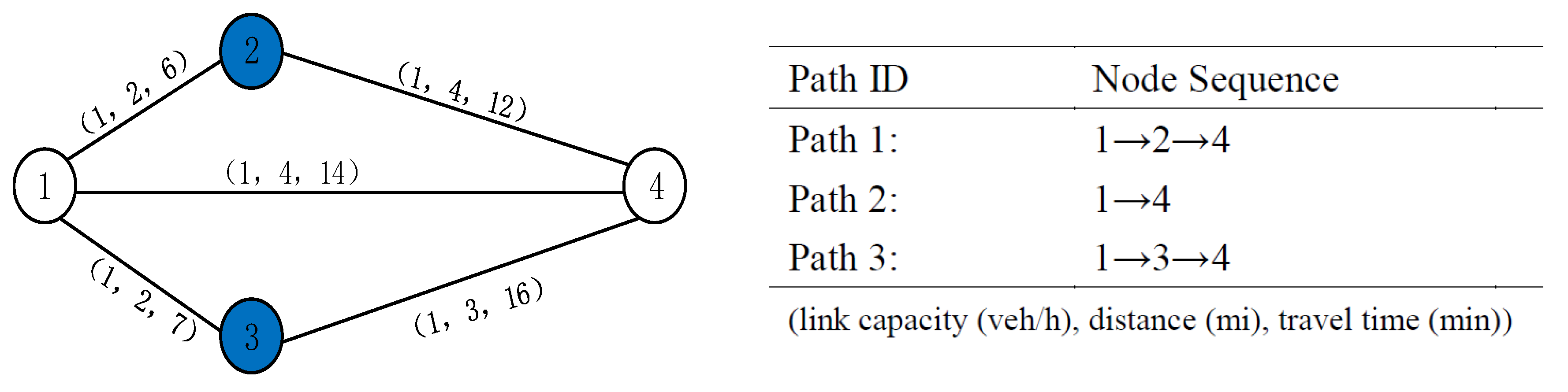
We build the model on a directed graph with as the set of nodes and as the set of links. Each agent has its own origin , destination , and comfortable electricity range . Each link has a travel time , distance , and capacity . To improve the efficiency of the total transportation system, a total budget is assumed. The fixed cost of a new charging station is , and the cost of a single charger is . Let the binary variable indicate whether a charging station is constructed at node , and let non-negative integer variable represent the number of chargers built, where the lower and upper bounds are and , respectively. For an agent traveling between the OD pair , the amount of electricity recharged at node is , and the charge level at node after recharging is , where and represent the battery capacity and the initial amount of power. Let indicate whether an agent recharges at node . Some sufficiently large constants are defined, such as , , . Let be the energy consumption rate. Here, the binary variable equals when link is traveled and otherwise. Further, variable equals 0 when link is traveled and is unlimited otherwise.
Subject to
Station capacity constraint:
Link capacity constraint:
Charging delay constraint:
The objective Equation (7) is to minimize the total trip time of all agents, which includes three parts. The first part is the travel time ; the second part is the charging time , in which the first component is the fixed recharging preparation time and the second component represents the variable time depending on the amount of recharged electricity; and the third part presents queue time . Equation (8) is a traditional agent-based flow balance constraint. Equation (9) is the budget constraint, where the first part is the fixed cost of a recharging station, and the second part is the variable cost, which is calculated by multiplying the number of chargers by the cost of a charger. The charger number capacity is the same as (or lower) than the maximum capacity of a station, constraint (10), and higher than the minimum constraint (11). Equation (12) represents the link capacity constraint. Equations (13) and (15) specify the relationship between the charge levels at starting and ending nodes where a link is utilized. In Equation (15), . Equation (14) specifies that the charge level is higher than the comfortable range where . Equation (16) suggests that a BEV only recharges its battery at nodes with a charging station where . Equation (17) sets the upper and lower bounds of the charge levels. Equation (18) sets the initial charge level. Equation (19) determines if agent chooses to recharge his or her battery at node . Equation (20) calculates the queue time. Equations (21)–(23) specify the binary variables , , and , respectively. Equation (24) specifies that the variable is a non-negative integer. Equation (25) specifies that the variable is a non-negative real number. Equation (26) specifies that the variable is a real number.
For the reader’s convenience, in this part, the queue time will be further explained. In
Section 2.3.1, the calculation of the queue time is described in words, where if one charging station
is chosen for recharging by agent
, then the queue time function is
; otherwise,
. This is dealt with by Equation (20) where
indicates whether the agent
recharges at node
. If
equals
, which means agent
recharges at node
, then Equation (20) can be rewritten as
Equation (27) can be further reformulated as
Since the objective is to minimize
,
takes the value
. If
equals
, where agent
would not recharge at node
, Equation (20) can be reformulated as
Here, is a positive real number according to Equation (25), and the minimization of is required, so is equal to zero. Therefore, this model can reasonably reflect the queue time.
5. Conclusions and Discussions
There is a strong demand for the deployment of charging stations, including from policy makers. The policy maker not only needs to determine the location of charging stations, but also the number of chargers that each charging station should be given to create an effective allocation of resources. Therefore, this paper has conducted in-depth research on the location of charging stations, and also discussed the number of chargers. Specifically, firstly, our research presents a novel approach to deployment locations for BEV charging stations. Previously, charging stations of the same size are discussed. Furthermore, multiple types of charging stations with different charging speeds have been studied [
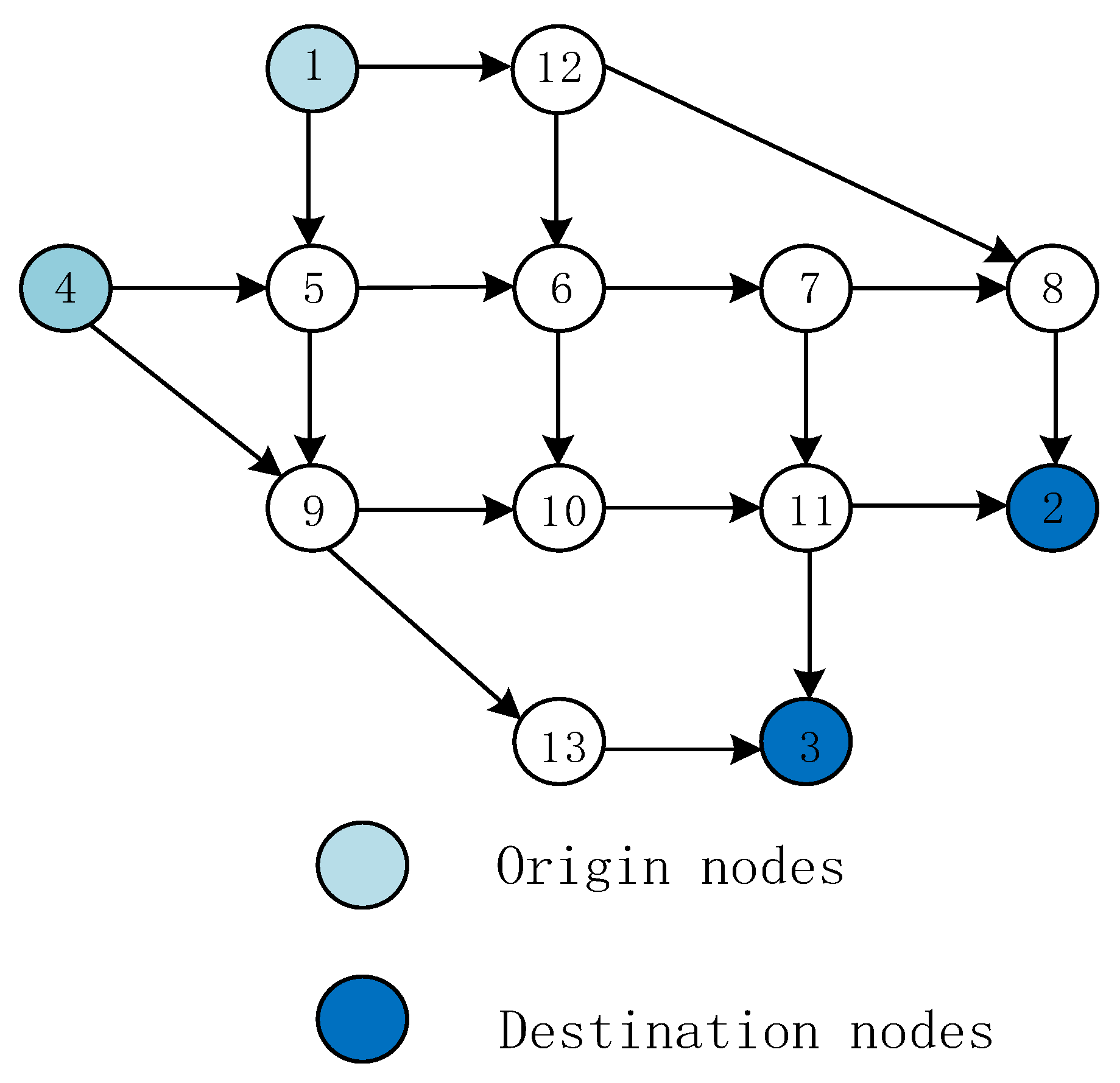
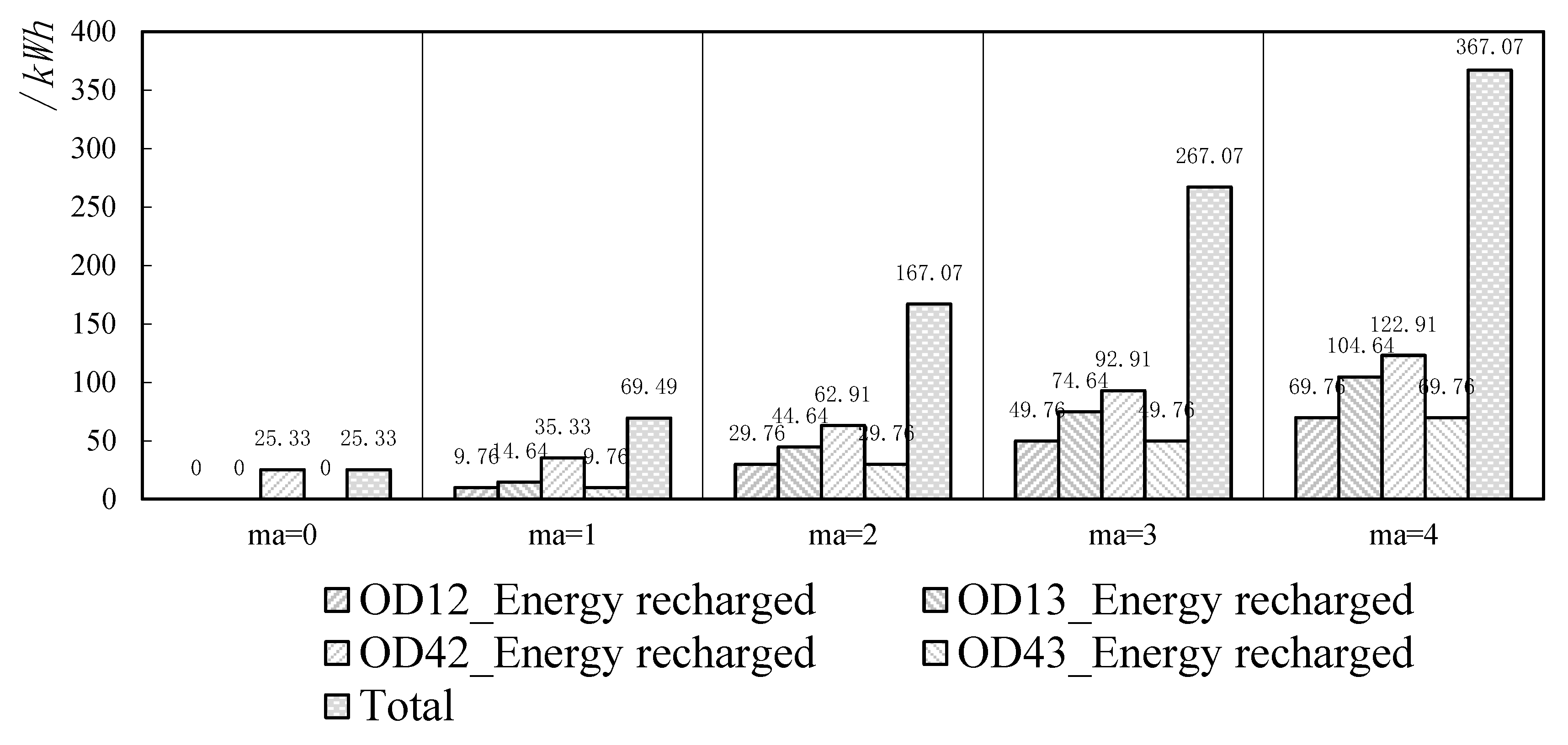
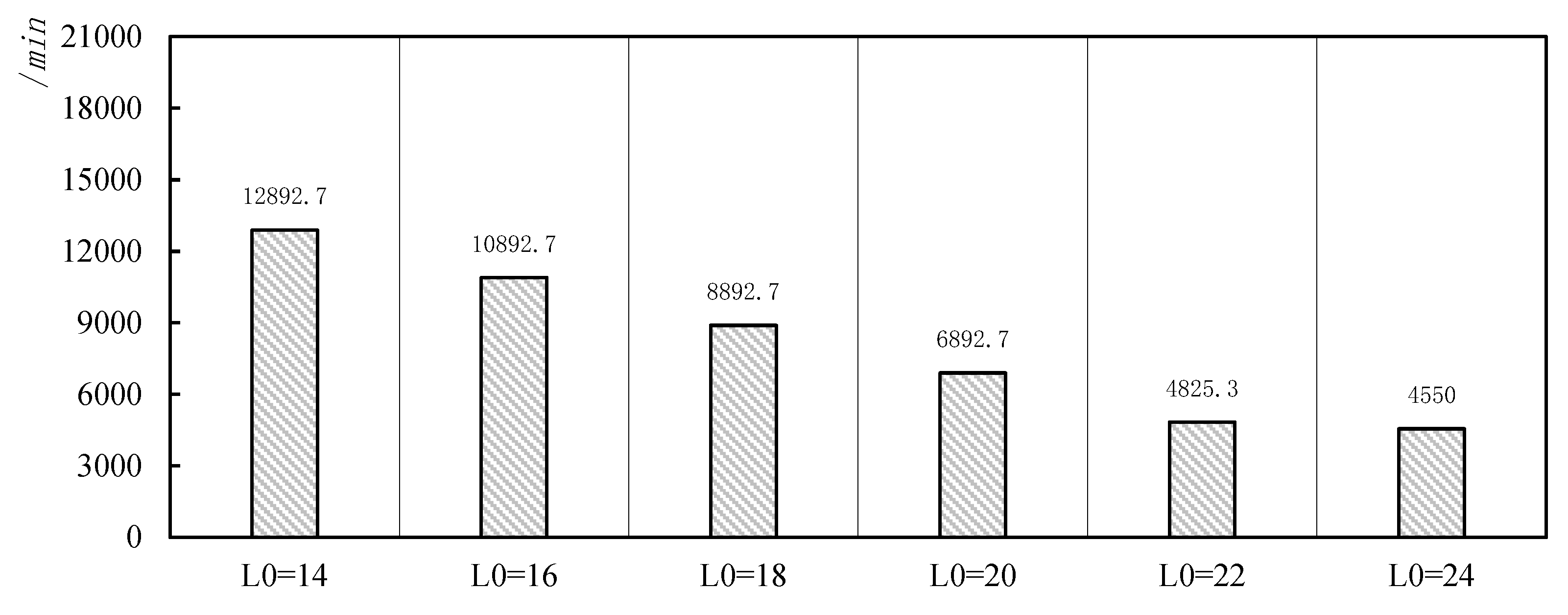
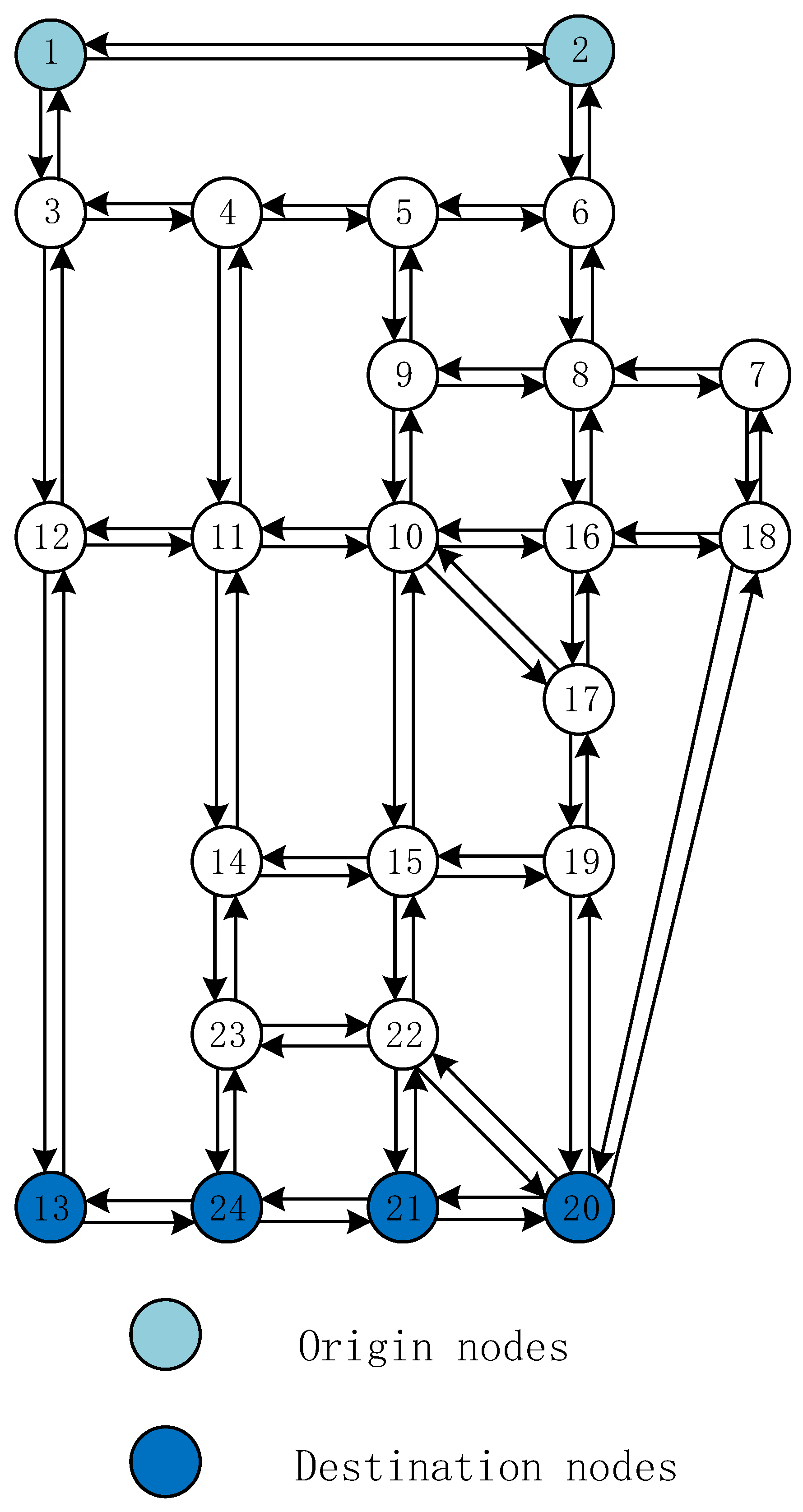
22], while the size of charging stations has not been the focus of previous studies. There are charging stations of different sizes with different charging service efficiencies in reality. Therefore, our research on various charging station sizes addresses an important gap in previous research. Secondly, in our study, an agent-based location problem for charging stations for BEVs is adopted instead of a traditional flow-based model. Therefore, the agent differences of one OD pair can be reflected. Thirdly, an MILP formulation of the ARMSLP-CN is presented. Finally, using the GAMS commercial solver, the problem could be solved directly. To demonstrate the model, the Nguyen-Dupius and Sioux Falls networks are solved and sensitivity analyses regarding range anxiety, initial state of charge, total cost budget, and different charging speeds depending on the type of charging devices, are also conducted.
Furthermore, there are some potential extended ways forward for this model. First, an efficient algorithm is expected, because variables will increase rapidly in the real network, which make the efficiency of solvers seriously insufficient. Moreover, more realistic conditions, such as weather, temperature, and so on, are worth considering. We will further increase the application of real data. Paul Brooker and Qin [
34] used real data to analyze the potential location of charging stations to increase the service efficiency of charging devices. Therefore, we should further apply the model to the real network. Furthermore, Oda et al., [
35,
36] used the historical data of current charging equipment used to optimize the number of chargers that should be further increased in the existing charging stations with the aim of minimum charging waiting time. We should optimize the number of chargers on the basis of the existing chargers, which can avoid the waste of original resources.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}