Design of a Concentrically Stacked Modular Actuator with Forced Air Cooling for Multi-DOF Robotic Systems



Abstract
:1. Introduction
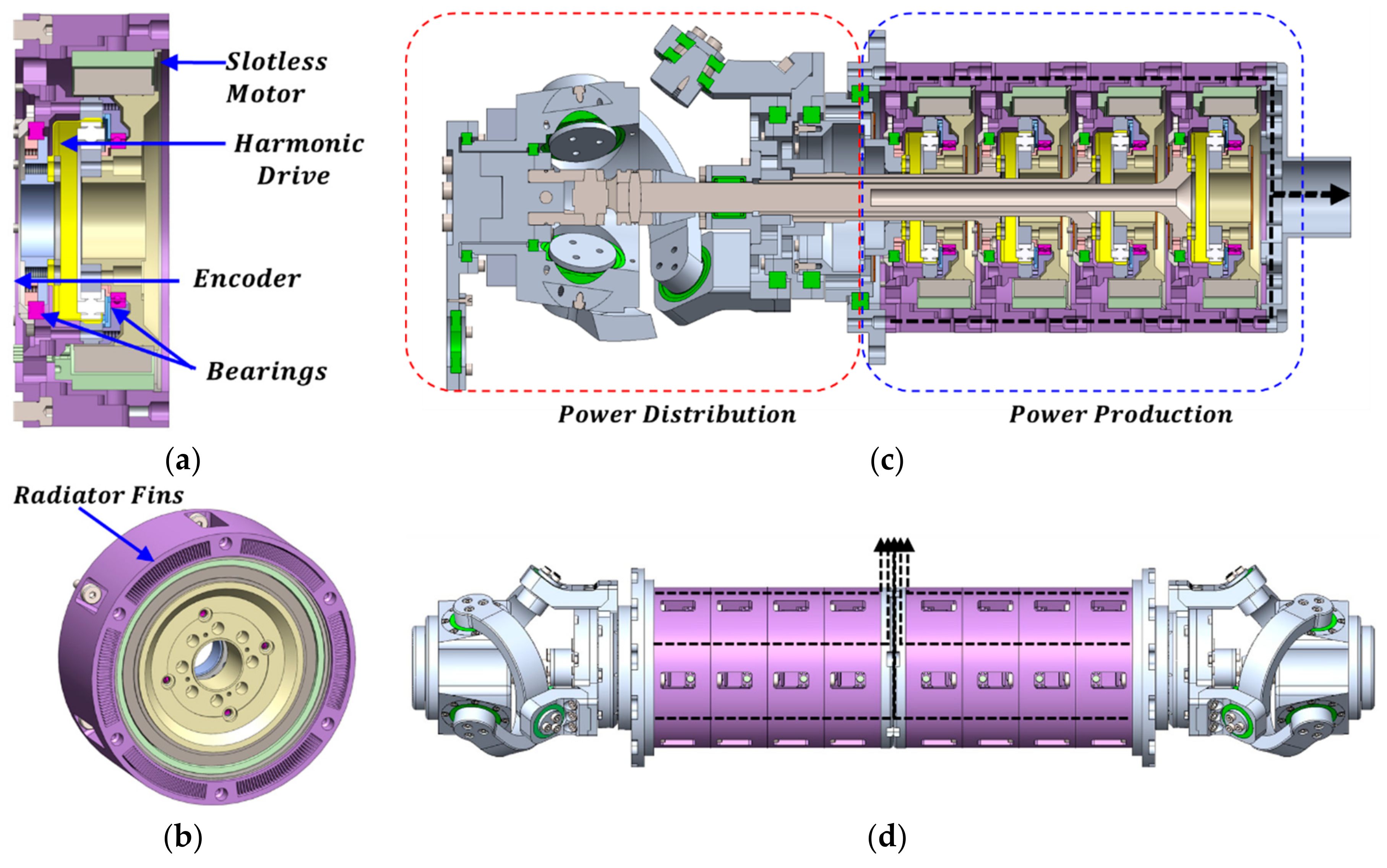
2. Design of a Concentrically Stacked Modular Actuator
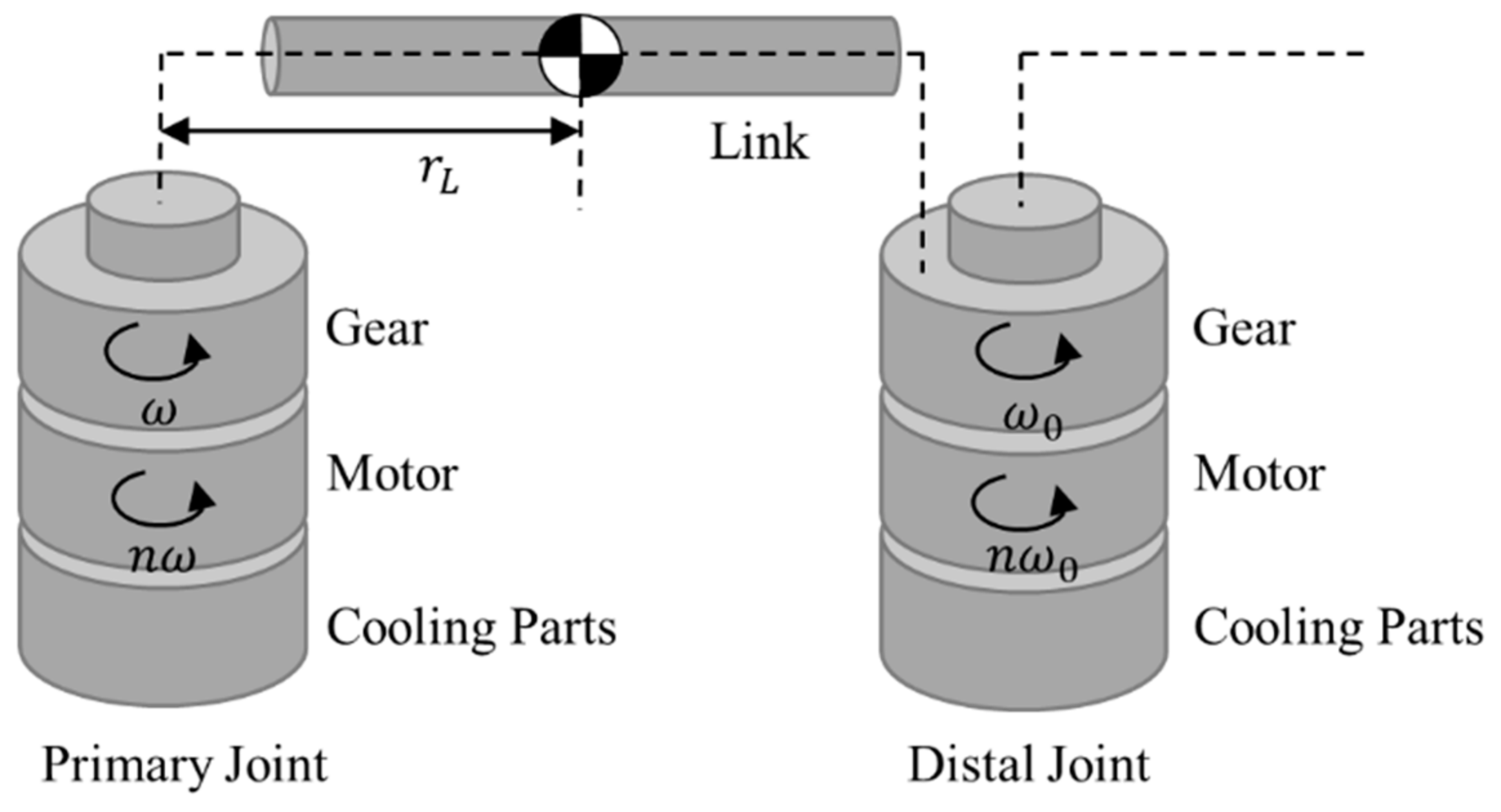
2.1. Design Concept
2.2. Comparison between the Conventional and Proposed Robotic Platforms
3. Thermal Performance of Motors
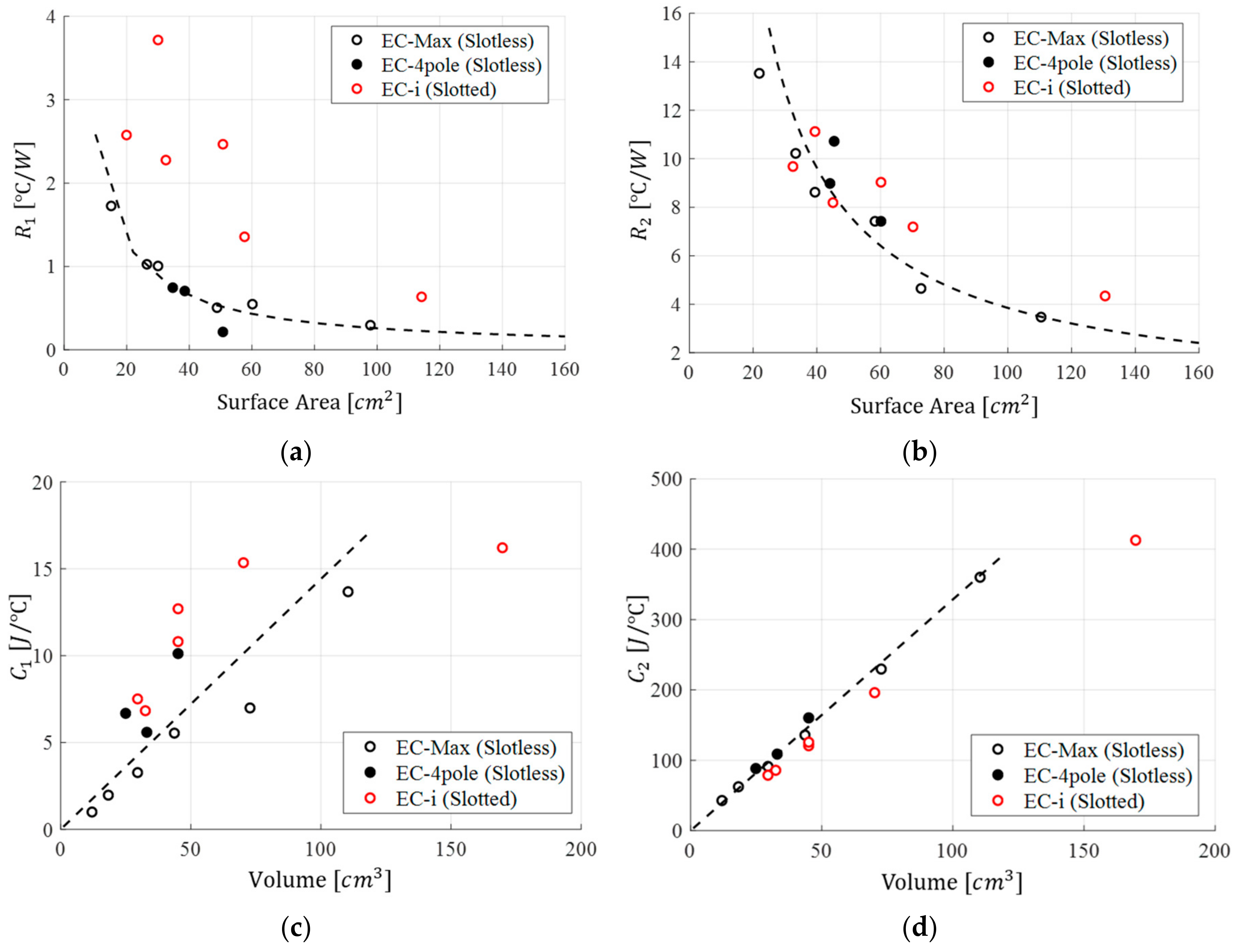
3.1. Geometry and Thermal Characteristics of Motors
3.2. Slot Types and Thermal Characteristics of Motors
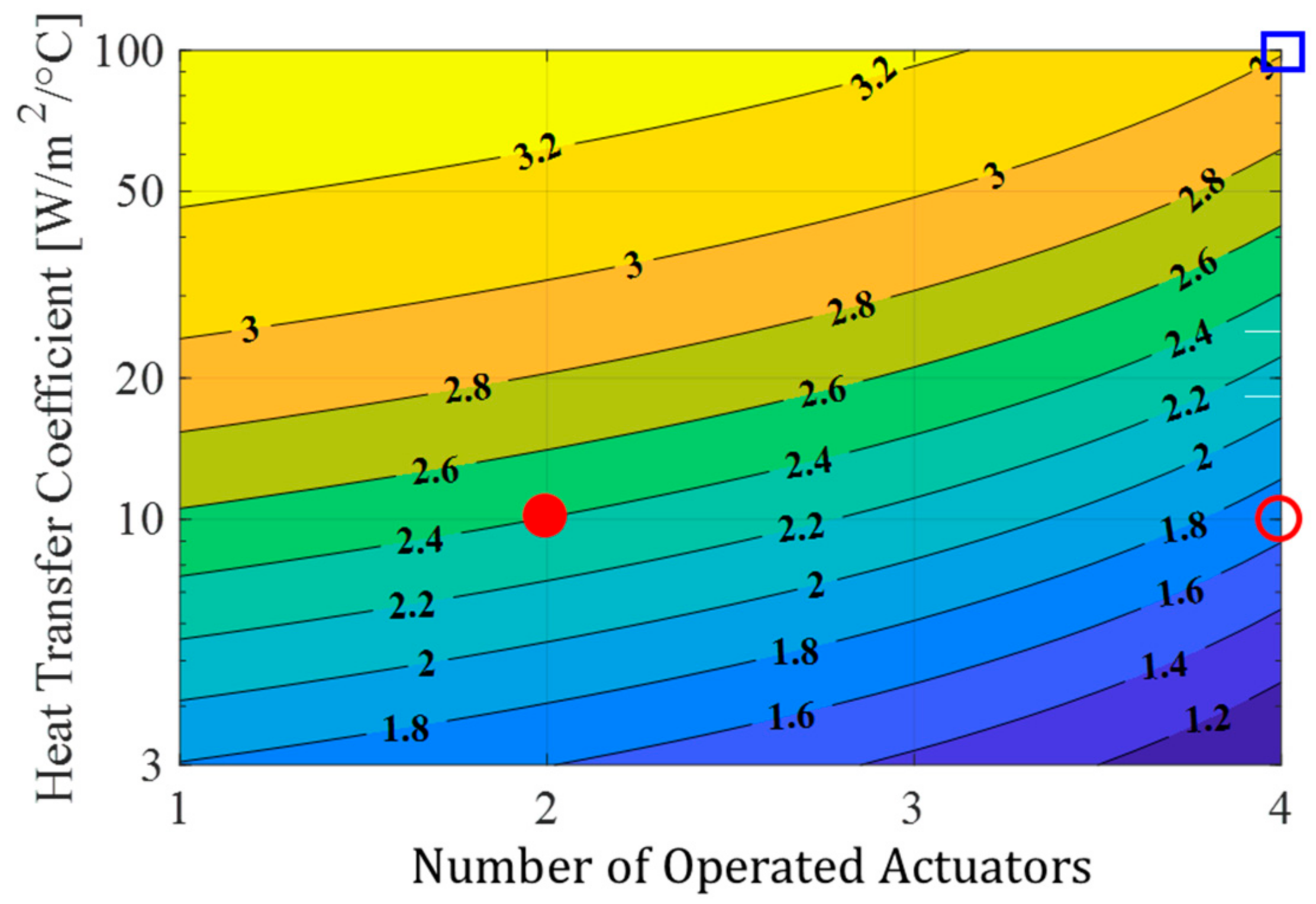
4. Verification by Simulation
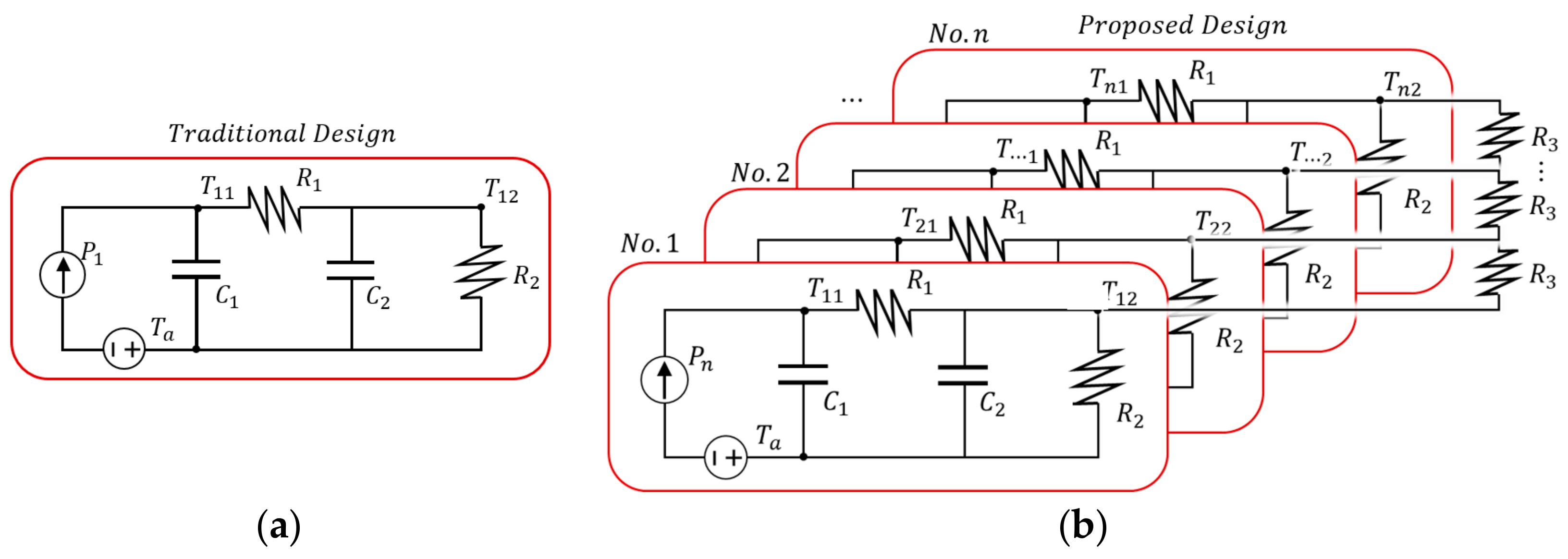
4.1. Analysis Using a Thermal Equivalent Circuit
4.2. System Modeling
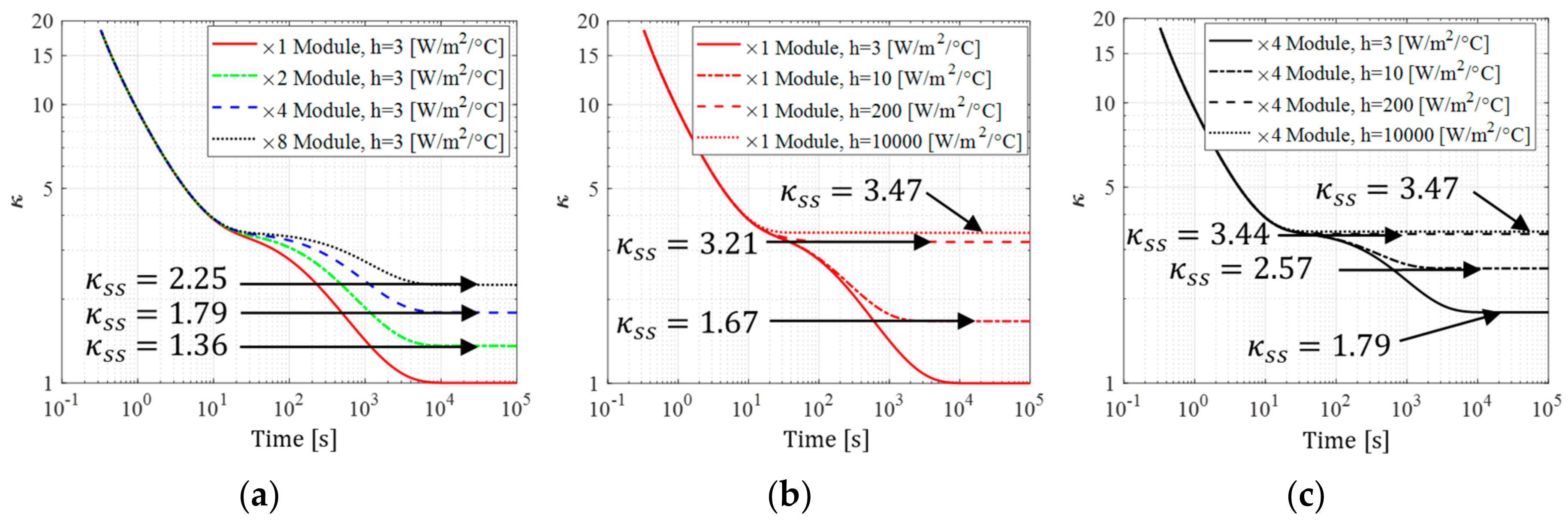
4.3. Simulation Results
4.4. Discussion of the Simulation Results
5. Verification by Experiment
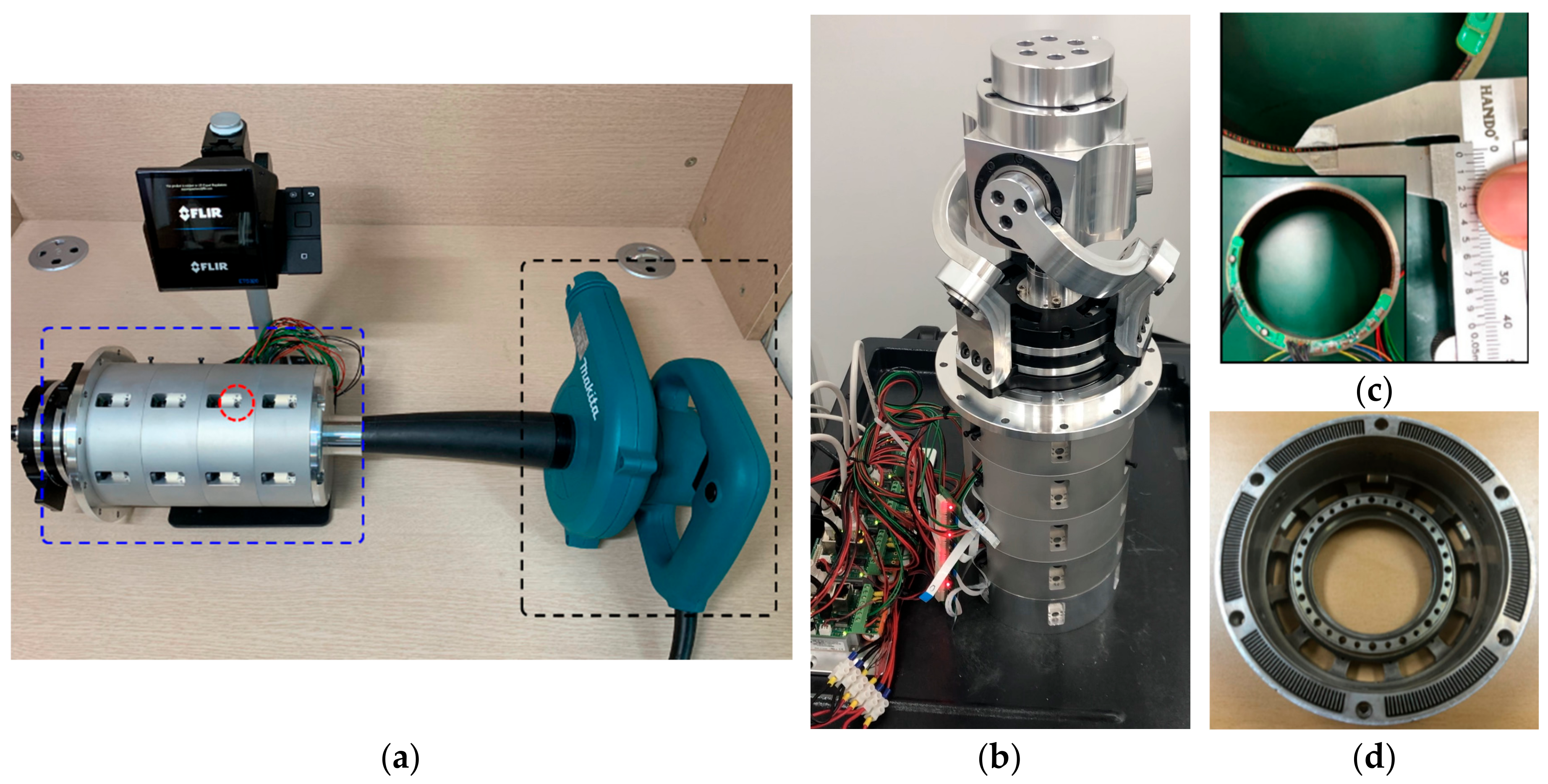
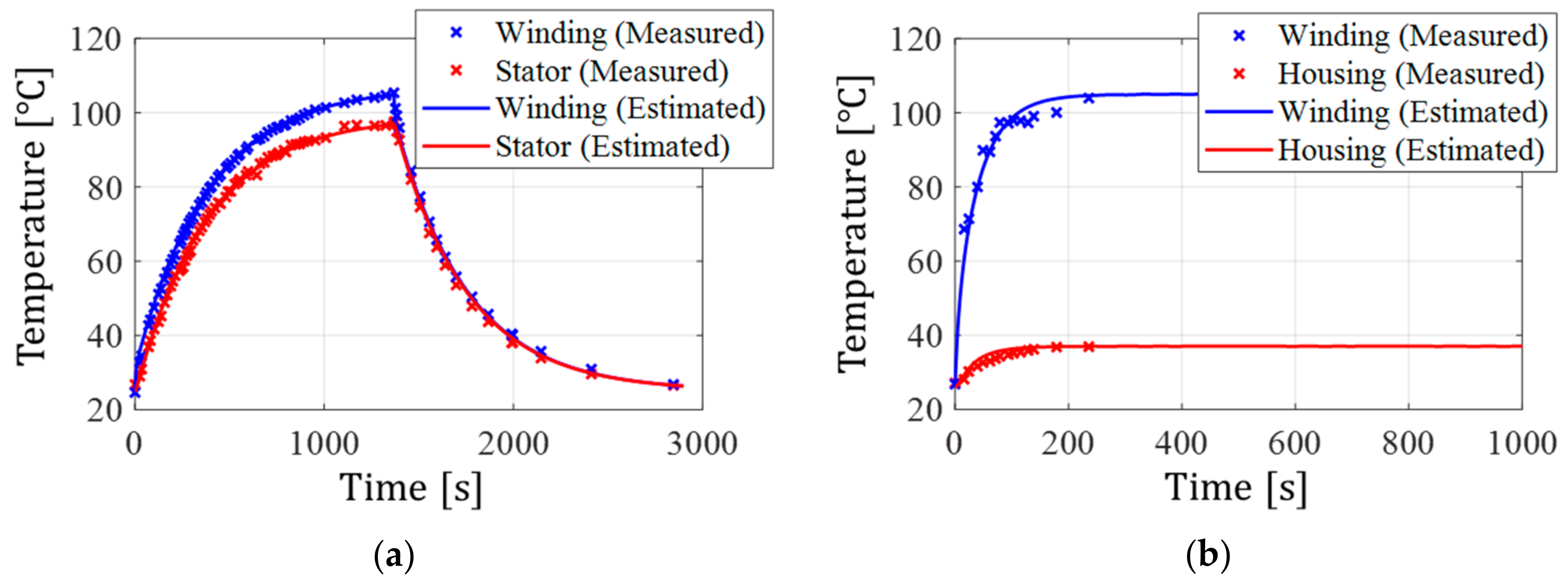
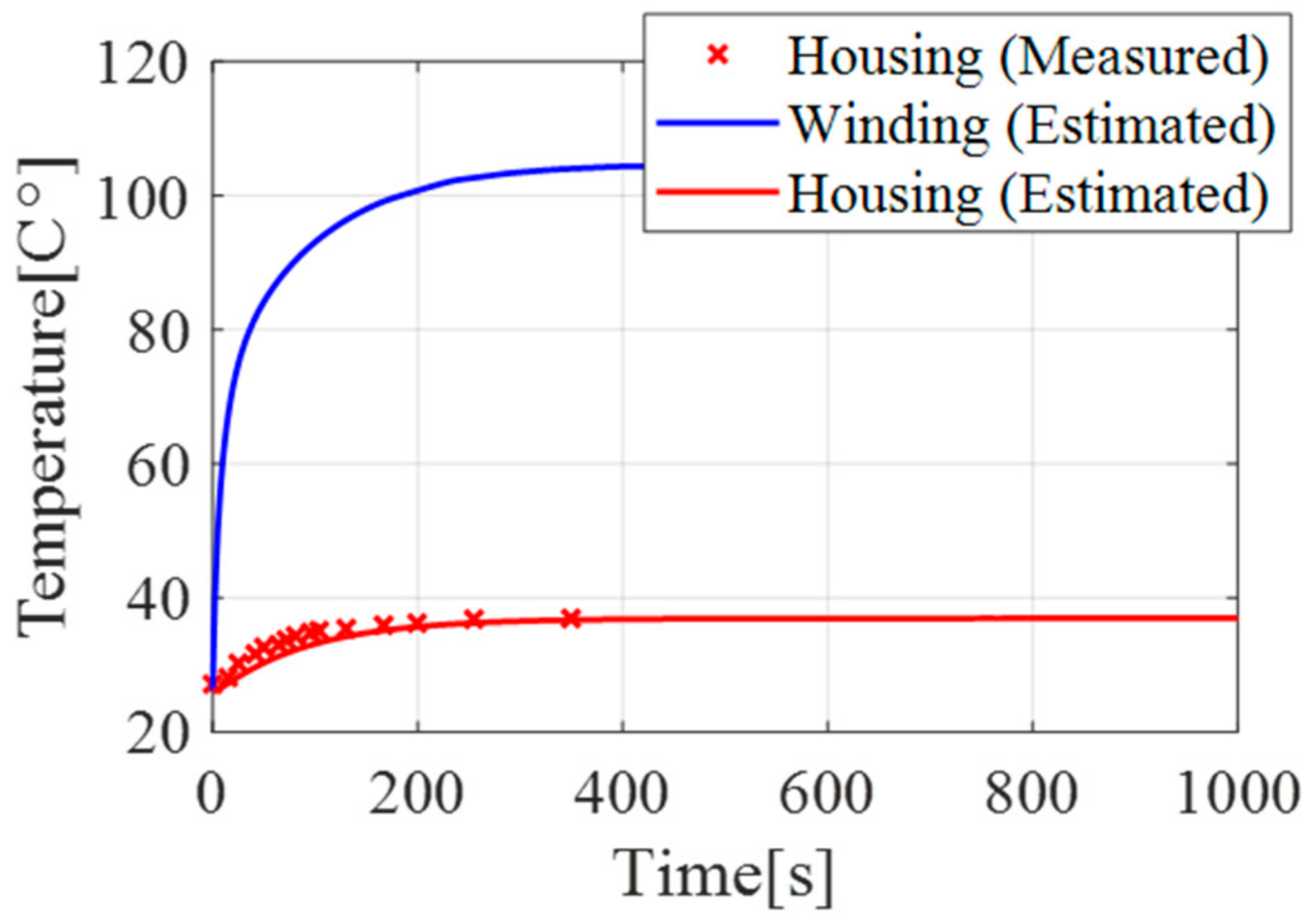
5.1. Thermal Characteristics of the CoSMo Actuator
5.2. Discussion of the Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations/Nomenclature
| CoSMo | concentrically stacked modular |
| DOF | degrees of freedom |
| COM | center of mass |
| HTC | heat transfer coefficient |
| STEC | simplified thermal equivalent circuit |
| RMS | root mean square |
References
- Grebenstein, M.; Albu-Schäffer, A.; Bahls, T.; Chalon, M.; Eiberger, O.; Friedl, W.; Gruber, R.; Haddadin, S.; Hagn, U.; Haslinger, R.; et al. The DLR hand arm system. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3175–3182. [Google Scholar] [CrossRef]
- Kojima, K.; Karasawa, T.; Kozuki, T.; Kuroiwa, E.; Yukizaki, S.; Iwaishi, S.; Nozawa, S. Development of life-sized high-power humanoid robot jaxon for real-world use. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 838–843. [Google Scholar] [CrossRef]
- Asano, Y.; Kozuki, T.; Ookubo, S.; Kawamura, M.; Nakashima, S.; Katayama, T.; Kakiuchi, Y. Human mimetic musculoskeletal humanoid Kengoro toward real world physically interactive actions. In Proceedings of the IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 876–883. [Google Scholar] [CrossRef]
- Paine, N.; Sentis, L. Design and comparative analysis of a retrofitted liquid cooling system for high-power actuators. Actuators 2015, 4, 182–202. [Google Scholar] [CrossRef]
- Zoss, A.; Kazerooni, H. Design of an electrically actuated lower extremity exoskeleton. Adv. Robot. 2006, 20, 967–988. [Google Scholar] [CrossRef]
- Kollmorgen. Available online: https://kollmorgen.com/en-us/products/motors/direct-drive/tbm-series/ (accessed on 30 September 2018).
- Tecnotion. Available online: https://tecnotion.com/products/torque-motors.html (accessed on 30 September 2018).
- Urata, J.; Nakanishi, Y.; Okada, K.; Inaba, M. Design of high torque and high speed leg module for high power humanoid. In Proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems, IROS, Taipei, Taiwan, 18–22 October 2010; pp. 4497–4502. [Google Scholar] [CrossRef]
- Kim, D.; Ahn, J.; Campbell, O.; Paine, N.; Sentis, L. Investigations of viscoelastic liquid cooled actuators applied for dynamic motion control of legged systems. In Proceedings of the IEEE-RAS 17th International Conference on Humanoid Robotics, Birmingham, UK, 15–17 November 2018. [Google Scholar] [CrossRef]
- Ito, Y.; Nozawa, S.; Urata, J.; Nakaoka, T.; Kobayashi, K.; Nakanishi, Y.; Inaba, M. Development and verification of life-size humanoid with high-output actuation system. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 3433–3438. [Google Scholar] [CrossRef]
- Salerno, L.J.; Kittel, P. Thermal Contact Conductance; NASA Technical Memorandum; Ames Research Center, Moffett Filed California: San Francisco, CA, USA, 1997. [Google Scholar]
- Staton, D.; Boglietti, A.; Cavagnino, A. Solving the more difficult aspects of electric motor thermal analysis in small and medium size industrial induction motors. IEEE Trans. Energy Convers. 2005, 20, 620–628. [Google Scholar] [CrossRef]
- Maxon Motor Catalog. Available online: https://www.maxonmotor.com/maxon/view/catalog/ (accessed on 30 September 2018).
- Permanent Magnet DC Motor with Coreless Winding; Technical Report; Maxon Motor: Obwalden, Switzerland, 2012.
- Holman, J.P. Heat Transfer, New York; McGraw-Hill: New York, NY, USA, 1997. [Google Scholar]
- Oosthuizen, P.H.; Naylor, D. Introduction to Convective Heat Transfer Analysis; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Diameter | Length | R1 | R2 | C1 | C2 | |
|---|---|---|---|---|---|---|---|
| Slotless Type | EC-Max | 40 | 88 | 0.29 | 3.45 | 13.7 | 359.4 |
| EC-Max | 30 | 62 | 0.5 | 7.4 | 5.5 | 135.1 | |
| EC-4pole | 30 | 64 | 0.209 | 7.4 | 10.1 | 159.5 | |
| EC-4pole | 30 | 47 | 0.74 | 8.96 | 5.6 | 108.0 | |
| EC-4pole | 22 | 66 | 0.7 | 10.7 | 6.7 | 87.5 | |
| Slotted Type | EC-i | 52 | 80 | 0.63 | 4.32 | 16.2 | 412.0 |
| EC-i | 40 | 36 | 2.27 | 8.17 | 10.8 | 124.8 | |
| EC-i | 30 | 36 | 2.46 | 9.01 | 13.3 | 121.0 | |
| EC-i | 30 | 42 | 3.71 | 11.1 | 7.5 | 78.0 | |
| EC-i | 40 | 56 | 1.35 | 7.17 | 15.3 | 195.3 | |
| Unit | mm | mm | |||||
| Parameter | Values |
|---|---|
| Specification | Value | Unit |
|---|---|---|
| Max. Continuous Torque | 1.76 | Nm |
| Max. Speed | 4600 | rpm |
| Max. Continuous Power | 850 | W |
| Diameter | 105 | mm |
| Stator Length | 25 | mm |
| Mass | 0.65 | kg |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, J.; Lee, J.; Yang, W.; Lee, S. Design of a Concentrically Stacked Modular Actuator with Forced Air Cooling for Multi-DOF Robotic Systems. Energies 2018, 11, 2947. https://doi.org/10.3390/en11112947
Noh J, Lee J, Yang W, Lee S. Design of a Concentrically Stacked Modular Actuator with Forced Air Cooling for Multi-DOF Robotic Systems. Energies. 2018; 11(11):2947. https://doi.org/10.3390/en11112947
Chicago/Turabian StyleNoh, Jaeho, Jaeyong Lee, Woosung Yang, and Sungon Lee. 2018. "Design of a Concentrically Stacked Modular Actuator with Forced Air Cooling for Multi-DOF Robotic Systems" Energies 11, no. 11: 2947. https://doi.org/10.3390/en11112947
APA StyleNoh, J., Lee, J., Yang, W., & Lee, S. (2018). Design of a Concentrically Stacked Modular Actuator with Forced Air Cooling for Multi-DOF Robotic Systems. Energies, 11(11), 2947. https://doi.org/10.3390/en11112947