Optimization of BuildingsEnergy Consumption by Designing Sliding Mode Control for Multizone VAV Air Conditioning Systems


Abstract
:1. Introduction
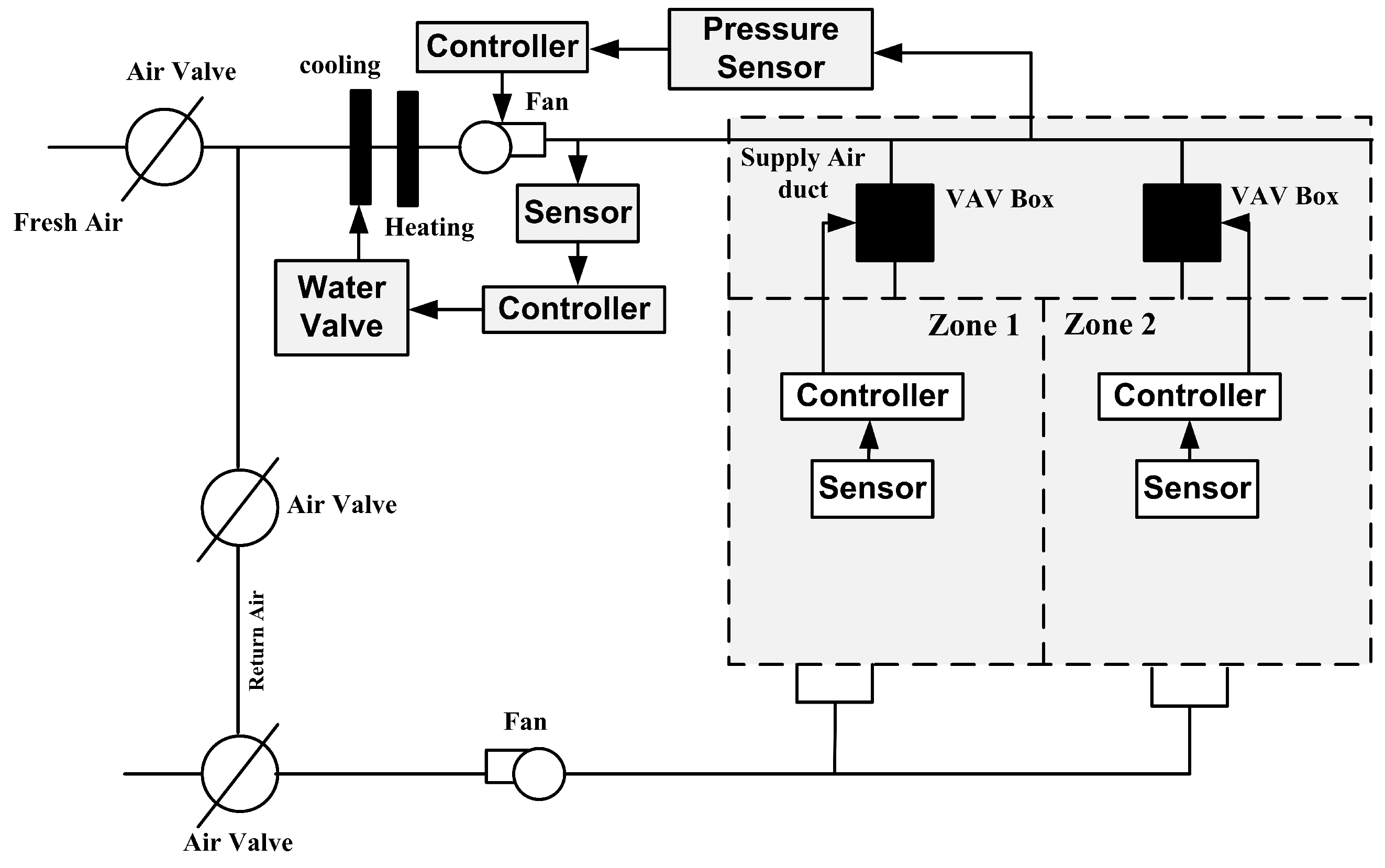
2. VAV System Description
- The temperatures of both zones are supervised by the VAV system controller. If the temperature is high, the controller operates the damper position to open, and if the temperature is low, the damper is adjusted to the close position.
- In the case of a fully-occupied zone, the damper cannot be shut down fully and has to maintain fresh air supply at a minimum level ( of the peak supply volume).
2.1. Mathematical Modeling of the VAV System
2.1.1. Cooling Coil
- The properties of the refrigerant do not depend on the variations in temperature for the operating range.
- The inlet temperature of air is the same as the inside air temperature in the coil.
- The heat transfer to air from the coil mass is steady.
2.1.2. Thermal Zones
2.1.3. Air Mixing Box
2.1.4. State Space Modeling
3. Controller Design
3.1. Sliding Mode Control
- The direction of trajectories is always towards .
- Once the sliding mode begins, the system follows .
- Trajectories are not allowed to leave the switching line and always belong to it.
3.1.1. Chattering Phenomena
3.1.2. SMC Design
3.2. PID
4. Results
- Integral time absolute error (ITAE).
- Integral of absolute error (IAE).
- Integral of squared error (ISE).
- Integral time squared error (ITSE).
5. Conclusions
- Both controllers track the desired commands, but SMC outperforms PID in all aspects of control actions.
- Since the zones temperatures are dynamically coupled with each other, this effect is decoupled by the integral action of PID and high gain inherent to SMC.
- Performance index values including all four types of errors are minimum for SMC as compared to PID.
- SMC ensures robustness by effectively tracking the setpoints in the existence of uncertainties with less overshoot and settling time, which makes SMC more energy efficient.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| AHU | Air handling unit |
| ANN | Artificial neural networks |
| ARX | Auto-regressive exogenous |
| DBN | Diagnostic Bayesian network |
| DFL | Direct feedback linear |
| EWMA | Exponentially weighted moving average |
| HMS | Health monitoring system |
| HVAC | Heating ventilating and air conditioning |
| IAQ | Indoor air quality |
| MIMO | Multiple input multiple output |
| MPC | Model predictive control |
| PID | Proportional integral derivative |
| RGA | Relative gain array |
| SISO | Single input single output |
| SMC | Sliding mode controller |
| SVM | Support vector machine |
| VAV | Variable air volume |
| VRF | Variable refrigerant flow |
References
- Chua, K.J.; Chou, S.K.; Yang, W.M.; Yan, J. Achieving better energy-efficient air conditioning—A review of technologies and strategies. Appl. Energy 2013, 104, 87–104. [Google Scholar] [CrossRef]
- Okochi, G.S.; Yao, Y. A review of recent developments and technological advancements of variable-air-volume (VAV) air-conditioning systems. Renew. Sustain. Energy Rev. 2016, 59, 784–817. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Dong, H.; Jeong, J. Energy saving assessment of a desiccant-enhanced evaporative cooling system in variable air volume applications. Appl. Therm. Eng. 2017, 117, 94–108. [Google Scholar] [CrossRef]
- Moradi, H.; Setayesh, H.; Alasty, A. PID-Fuzzy control of air handling units in the presence of uncertainty. Int. J. Therm. Sci. 2016, 109, 123–135. [Google Scholar] [CrossRef]
- Zhai, Z.; Johnson, S.N. Full-Scale Laboratory Test on Energy Dependence on Pressure Drops in HVAC Systems. Procedia Eng. 2017, 205, 2133–2140. [Google Scholar] [CrossRef]
- Wang, G.; Song, L. Air handling unit supply air temperature optimal control during economizer cycles. Energy Build. 2012, 49, 310–316. [Google Scholar] [CrossRef]
- Shah, A.; Huang, D.; Chen, Y.; Kang, X.; Qin, N. Robust Sliding Mode Control of Air Handling Unit for Energy Efficiency Enhancement. Energies 2017, 10, 1815. [Google Scholar] [CrossRef]
- Yao, Y.; Yang, K.; Huang, M.; Wang, L. A state-space model for dynamic response of indoor air temperature and humidity. Build. Environ. 2013, 64, 26–37. [Google Scholar] [CrossRef]
- Zhu, Y.; Jin, X.; Du, Z.; Fang, X. Online optimal control of variable refrigerant flow and variable air volume combined air conditioning system for energy saving. Appl. Therm. Eng. 2015, 80, 87–96. [Google Scholar] [CrossRef]
- Attaran, S.M.; Yusof, R. Enhancement of control’s parameter of decoupled hvac system via adaptive controller through the system identification tool box. J. Teknol. 2015, 76, 1. [Google Scholar] [CrossRef]
- Shi, Z.; Li, X.; Hu, S. Direct Feedback Linearization Based Control in Variable Air Volume air-conditioning System. Phys. Procedia 2012, 24, 1248–1254. [Google Scholar] [CrossRef]
- Pang, X.; Piette, M.A.; Zhou, N. Characterizing variations in variable air volume system controls. Energy Build. 2017, 135, 166–175. [Google Scholar] [CrossRef]
- Xu, X.; Zhong, Z.; Deng, S.; Zhang, X. A review on temperature and humidity control methods focusing onair-conditioning equipment and control algorithms applied insmall-to-medium-sized buildings. Energy Build. 2018, 162, 163–176. [Google Scholar] [CrossRef]
- Tukur, A.; Hallinan, K. Statistically informed static pressure control in multiple-zone VAV systems. Energy Build. 2017, 135, 244–252. [Google Scholar] [CrossRef]
- Kang, S.; Kim, H.; Cho, Y. A study on the control method of single duct VAV terminal unit through the determination of proper minimum air flow. Energy Build. 2014, 69, 464–472. [Google Scholar] [CrossRef]
- Kang, C.; Park, J.; Park, M.; Baek, J. Novel Modeling and Control Strategies for a HVAC System Including Carbon Dioxide Control. Energies 2014, 7, 3599–3617. [Google Scholar] [CrossRef] [Green Version]
- Kaam, S.; Raftery, P.; Cheng, H.; Paliaga, G. Time-averaged ventilation for optimized control ofvariable-air-volume systems. Energy Build. 2017, 139, 465–475. [Google Scholar] [CrossRef]
- Chuang, H.; Chi, J.; Chang, K.; Lee, C. Study on a fan coil unit and chiller by an intelligent control method with a stepless variable speed driving technology. Build. Environ. 2018, 132, 137–146. [Google Scholar] [CrossRef]
- Yang, X.; Jin, X.; Du, Z.; Fan, B.; Chai, X. Evaluation of four control strategies for building VAV air-conditioning systems. Energy Build. 2011, 43, 412–422. [Google Scholar] [CrossRef]
- Li, X.; Zhao, T.; Zhang, J.; Chen, T. Predication control for indoor temperature time-delay using Elman neural network in variable air volume system. Energy Build. 2017, 154, 545–552. [Google Scholar] [CrossRef]
- Cutillas, C.G.; Ramírez, J.R.; Miralles, M.L. Optimum Design and Operation of an HVAC Cooling Tower for Energy and Water Conservation. Energies 2017, 10, 299. [Google Scholar] [CrossRef]
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef]
- Schirrer, A.; Brandstetter, M.; Leobner, I.; Hauer, S.; Koze, M. Nonlinear model predictive control for a heating and cooling system of a low-energy office building. Energy Build. 2016, 125, 26–98. [Google Scholar] [CrossRef]
- Huang, G. Model predictive control of VAV zone thermal systems concerning bi-linearity and gain nonlinearity. Control Eng. Pract. 2011, 19, 700–710. [Google Scholar] [CrossRef]
- Liang, W.; Quinte, R.; Jia, X.; Sun, J. MPC control for improving energy efficiency of a building air handler for multi-zone VAVs. Build. Environ. 2015, 92, 256–268. [Google Scholar] [CrossRef]
- Alamin, Y.; Castilla, M.; Álvarez, J.; Ruano, A. An Economic Model-Based Predictive Control to Manage the Users’ Thermal Comfort in a Building. Energies 2017, 10, 321. [Google Scholar] [CrossRef]
- Allen, W.H.; Rubaai, A.; Chawla, R. Fuzzy Neural Network-Based Health Monitoring for HVAC System Variable-Air-Volume Unit. IEEE Trans. Ind. Appl. 2015, 52, 2513–2524. [Google Scholar] [CrossRef]
- Wu, Z.; Jia, Qi.; Guan, X. Optimal Control of Multiroom HVAC System: An Event-Based Approach. IEEE Trans. Contrrol Syst. Technol. 2016, 24, 662–669. [Google Scholar] [CrossRef]
- Behrooz, F.; Mariun, N.; Marhaban, M.; Radzi, M.M.; Ramli, A. Review of Control Techniques for HVAC Systems—Nonlinearity Approaches Based on Fuzzy Cognitive Maps. Energies 2018, 11, 495. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Pearson: London, UK, 2011; ISBN 978-0130673893. [Google Scholar]
- Liu, J. Sliding Mode Control Using MATLAB, 1st ed.; Academic Press: Cambridge, MA, USA, 2017; ISBN 978-0128025758. [Google Scholar]
- Åström, K.J.; Hägglund, T. Advanced PID Control; International Society of Automation, Inc.: Eindhoven, The Netherlands, 2005; ISBN 978-1556179426. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Controlled Variable | Manipulated Variable |
|---|---|---|
| 1 | Temperature of air supply | Flow rate of water in cooling coil |
| 2 | Zone 1 temperature | Air supply to Zone 1 by damper position |
| 3 | Zone 2 temperature | Air supply to Zone 2 by damper position |
| cooling coil mass kg | mass flow rate of cold water kg/s | ||
| supply air flow rate kg/s | cooling coil heat capacity J/kgK | ||
| cooling water heat capacity J/kgK | supply air heat capacity J/kgK | ||
| supply air density kgm | coefficient for heat exchange W/K | ||
| cooling coil temperature C | cooling coil outlet water temperature C | ||
| cooling coil inlet water temperature C | supply air inlet temperature to coil C | ||
| supply air outlet temperature of coil C | volume of i-th zone m | ||
| Area of i-th zone m | thermal transmittance of i-th zone W/m | ||
| i-th zone air flow rate kg/s | Temperature of i-th zone C | ||
| heat source of i-th zone (internal and external) Watt | flow rate of mixed air kg/s | ||
| flow rate of recycled air kg/s | external air flow rate kg/s | ||
| external air temperature C | mixed air temperature C | ||
| recycled air temperature C | p | percentage of recycled air % | |
| cold air supply temperature C |
| kg | J/kgK |
| J/kgK | J/kgK |
| kgm | W/K |
| 1218 m | W/mK |
| 500,500 Watt | C |
| C | 3690 m |
| C |
| Control Function | |||
|---|---|---|---|
| P (Proportional) | ∞ | 0 | |
| PI (Proportional integral) | 0 | ||
| PID (Proportional integral derivative) |
| Controller | Combination of Steps | Sine Wave | ||||||
|---|---|---|---|---|---|---|---|---|
| ITAE | IAE | ISE | ITSE | ITAE | IAE | ISE | ITSE | |
| PID | ||||||||
| 2902 | 5520 | 742 | 392.1 | |||||
| 352.5 | 3010 | 175.8 | 236.7 | |||||
| 9010 | 9.101 | 0.610 | 311.6 | |||||
| SMC | ||||||||
| 3000 | 101.1 | 166.1 | 321.8 | |||||
| 22.10 | 95.19 | 9360 | 158.4 | 146 | 8956 | |||
| 2020 | 2410 | 2012 | 155.7 | 12.35 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, A.; Huang, D.; Huang, T.; Farid, U. Optimization of BuildingsEnergy Consumption by Designing Sliding Mode Control for Multizone VAV Air Conditioning Systems. Energies 2018, 11, 2911. https://doi.org/10.3390/en11112911
Shah A, Huang D, Huang T, Farid U. Optimization of BuildingsEnergy Consumption by Designing Sliding Mode Control for Multizone VAV Air Conditioning Systems. Energies. 2018; 11(11):2911. https://doi.org/10.3390/en11112911
Chicago/Turabian StyleShah, Awais, Deqing Huang, Tianpeng Huang, and Umar Farid. 2018. "Optimization of BuildingsEnergy Consumption by Designing Sliding Mode Control for Multizone VAV Air Conditioning Systems" Energies 11, no. 11: 2911. https://doi.org/10.3390/en11112911
APA StyleShah, A., Huang, D., Huang, T., & Farid, U. (2018). Optimization of BuildingsEnergy Consumption by Designing Sliding Mode Control for Multizone VAV Air Conditioning Systems. Energies, 11(11), 2911. https://doi.org/10.3390/en11112911