This section presents the results obtained from an in-depth study of the performance and robustness of the five MPCs designs. This study assumes that the system state vector and the excitation force (
) for the whole prediction horizon (
M) are known. The computer simulations have been carried out using Simulink, employing a fourth order Runge–Kutta integration method with a fixed step of one millisecond. In order to solve the optimization problems with constraints, associated with MPCs’ design, the MATLAB quadprog function has been employed [
35]. Note that although the quadprog function provides
for the whole control horizon
N, only the setpoint obtained for the current instant
k is applied [
18,
19].
4.1. Performance Comparison
This section shows a comparison between the seven controllers designed. The controllers’ performances are compared in terms of: average power generated, reduction of instantaneous power peaks, overshoot of nominal limits and control effort. A sea state defined by the JONSWAP spectrum [
15,
16], with a significant wave height of three meters and a peak period of 11 s, has been chosen as a realistic scenario for evaluating these characteristics. In order to obtain a truthful performance comparison, all predictive controllers must have the same information about the incoming wave, which is recorded in the prediction time
. To set the prediction horizon, two factors have been taken into account. Firstly, in [
7,
8,
10], the authors used realistic sea states, and they set the prediction times between two and four seconds. Furthermore, in [
8], the authors checked that
could also be reduced to three or four seconds without significant reduction of the harvested energy. Secondly, in [
36], the authors showed how short-term wave forecasting models maintain good performance up to five seconds of prediction for wide wave spectra. Therefore, in this work, the prediction time chosen was three seconds, the same as the one set in [
10]. With this
, a prediction horizon
, a control horizon
and a sampling period
s has been set for all MPCs. The RD and I-P controllers have the same sampling period. On the other hand, as a result of a fine-tuning for this realistic sea state, the parameters of the controllers are listed in
Table 4.
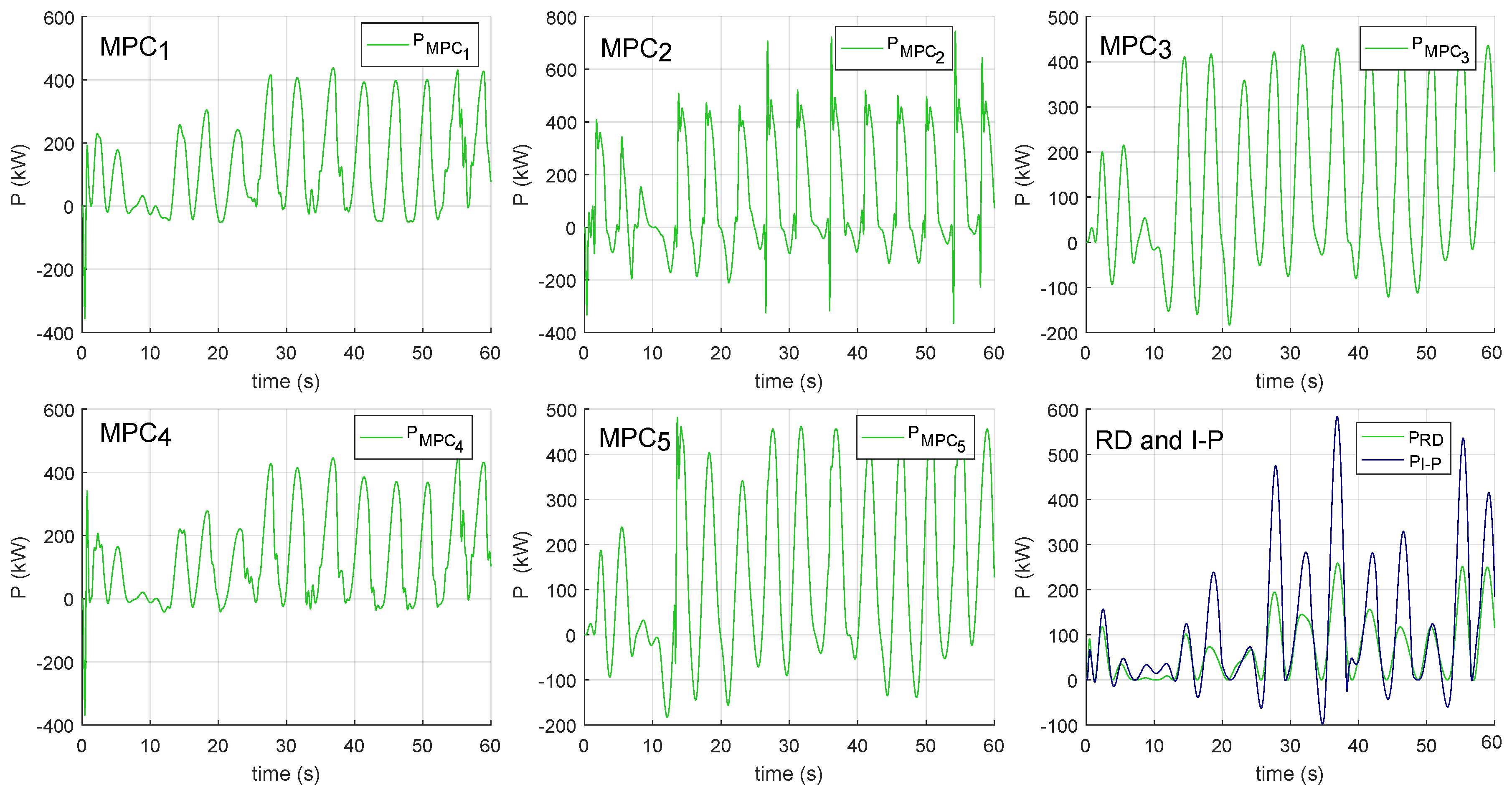
Figure 4 shows a comparison of the instantaneous mechanical powers generated by applying the seven controllers to the mathematical model (
15). In this comparison, it can be seen how MPCs with an embedded integrator (MPC
3 and MPC
5) achieve more regular power than the MPCs most used for WEC systems, those whose optimization criteria maximize the extracted power directly (MPC
1 and MPC
4). In addition,
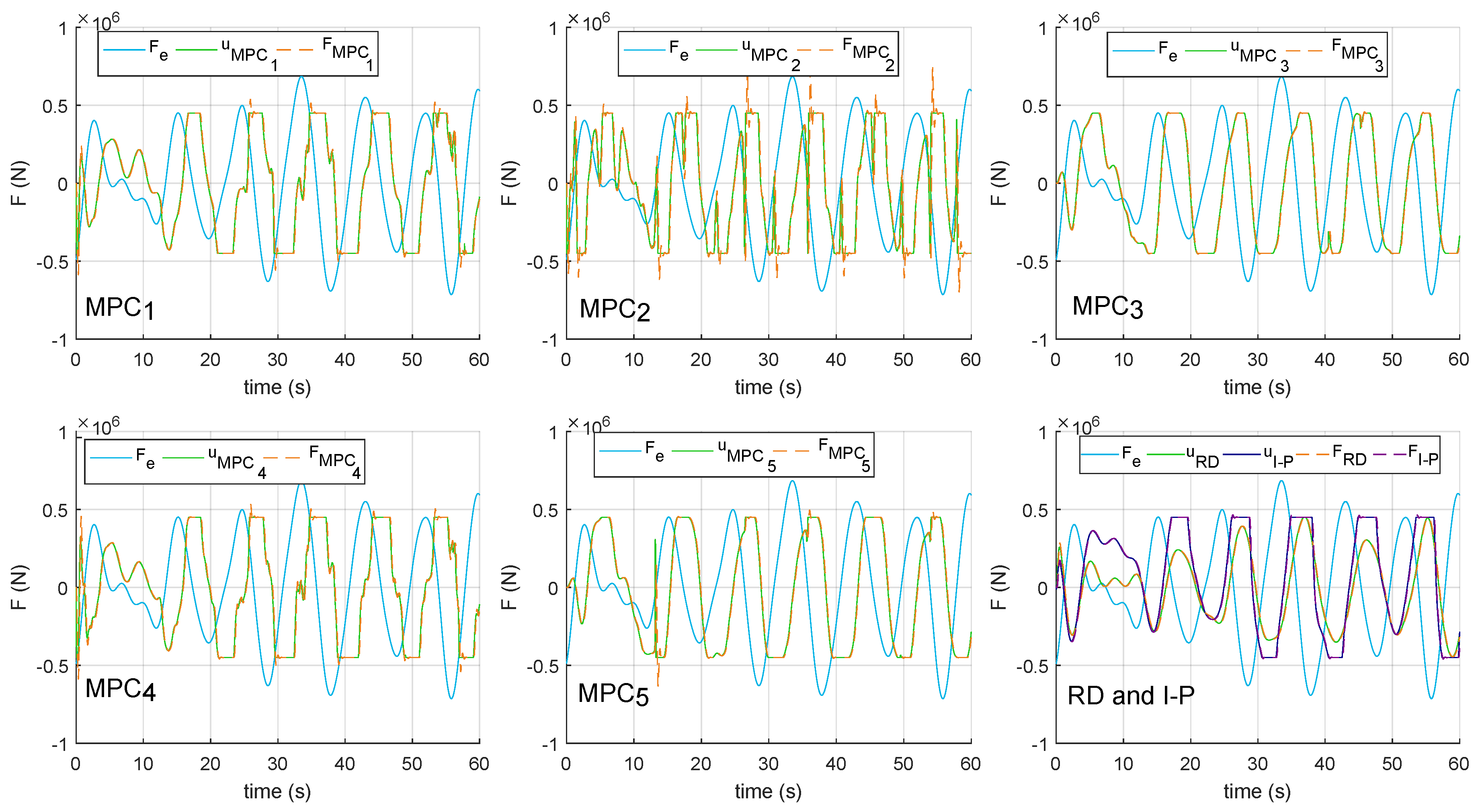
Figure 5 shows how MPCs with embedded integrators achieve less overshoot in the control force applied by the PTO system than all other MPCs (reducing actuator overstress).
By applying the MPC
2 to the system, it gives the most irregular power; while the power generated with the MPC
3, designed from the same model and following the same optimization criteria, is much cleaner, with fewer occasional peaks. This is due to the fact that the MPC
1 is continuously applying soft constraints to the oscillation speed, because it does not carry out a good control of the force that the PTO system exerts on the WEC during the time (see
Figure 5). On the other hand,
Table 5 shows how the addition of the embedded integrator (MPC
3) considerably improves the behavior of the system with respect to that obtained by applying the MPC
2. Since, the MPC
3 does not exceed nominal limits of the position and oscillation speed on any occasion. Furthermore, the MPC
3 controller generates a clearer control signal than the MPC
2 (see
Figure 5), and as a consequence, the underdamped response of the PTO system decreases greatly.
Table 5 records the most significant quality indicators of the control performed by each controller. First, this table shows the average mechanical powers generated by the WEC system when applying each controller. In this aspect, the MPC
5 controller is the one that generates more power, followed very closely by the MPC
1, MPC
4 and, with a bit more distance, the MPC
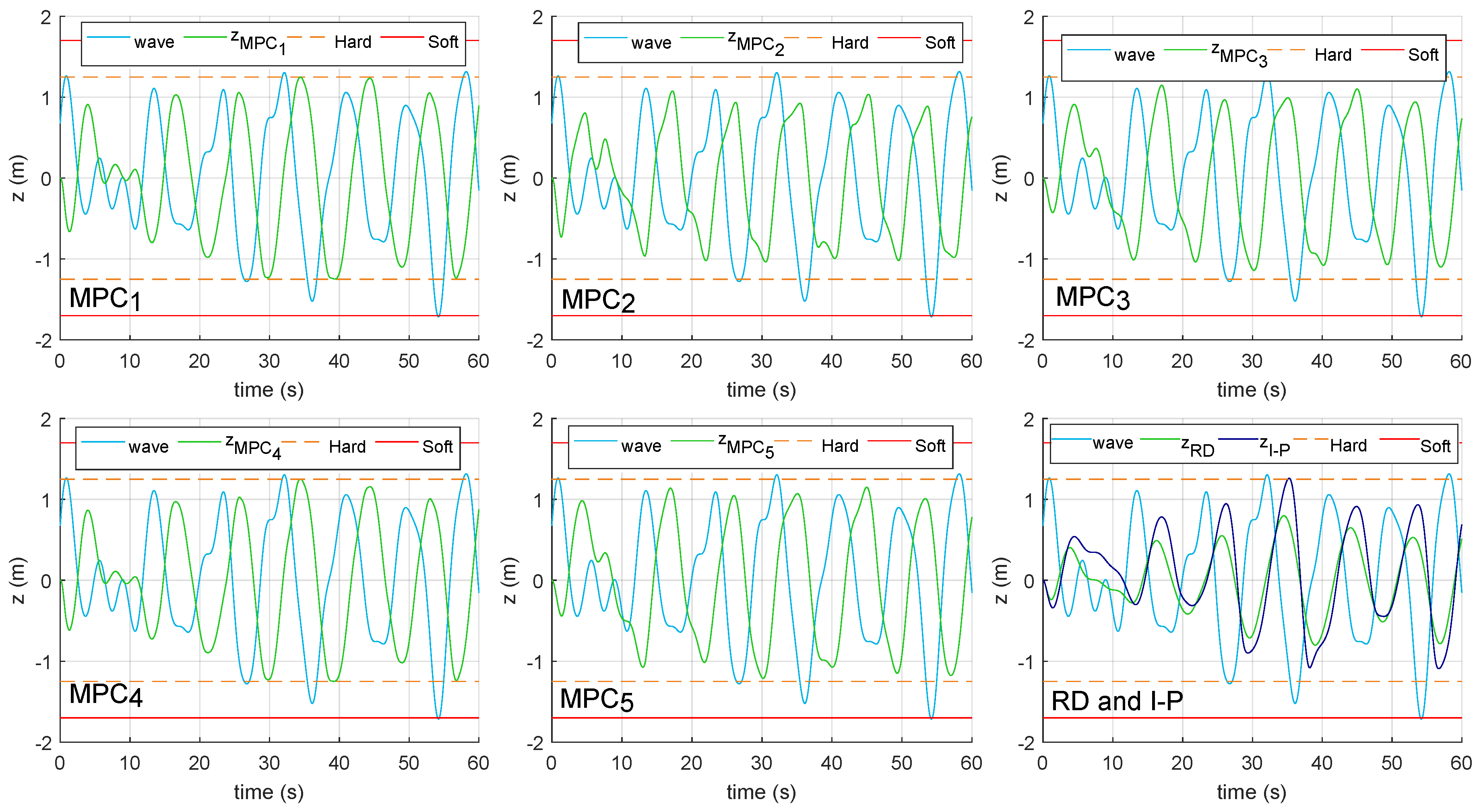
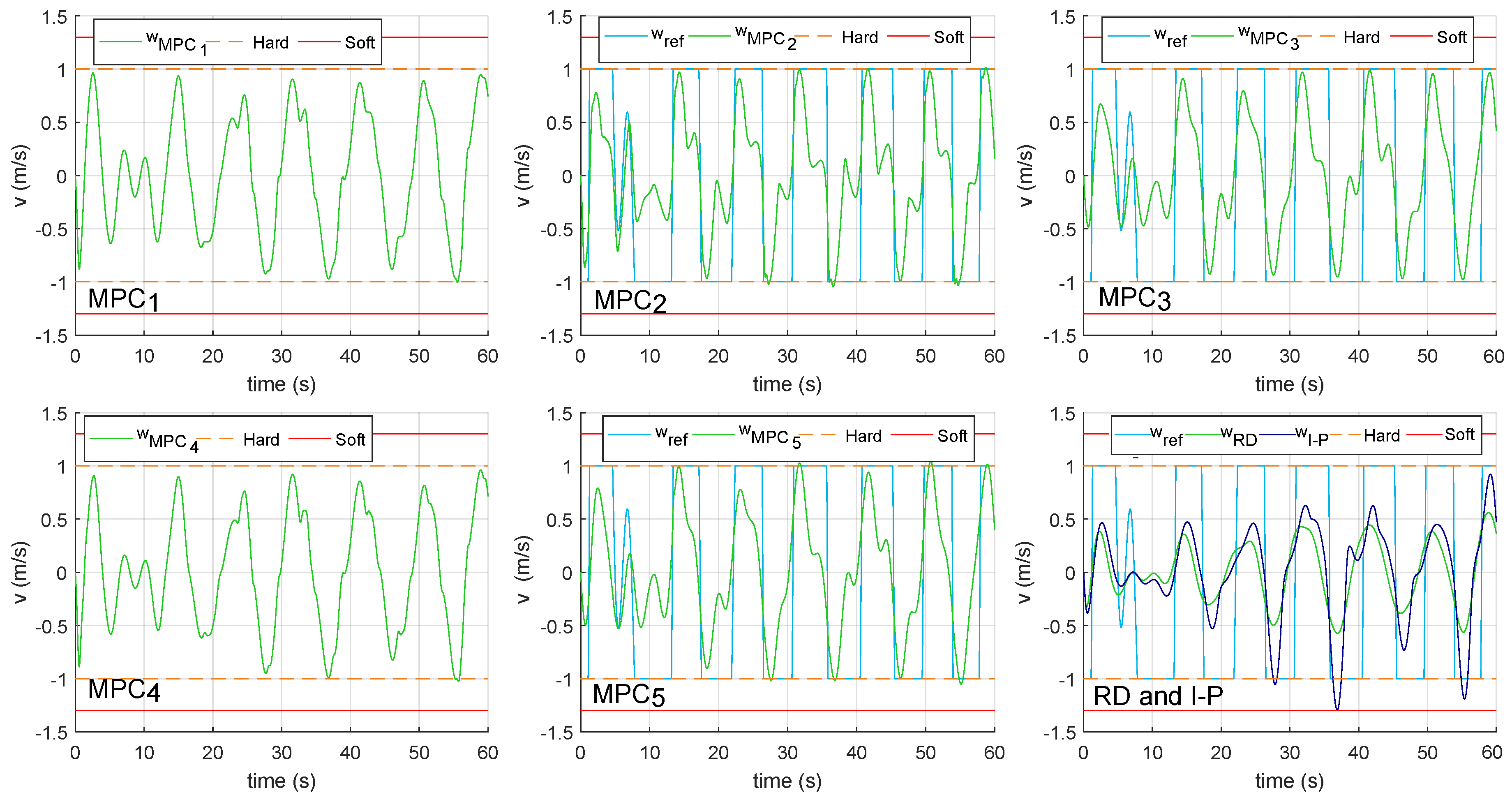
3. On the other side, the indicators
and
quantify the area of overshoot from the nominal limits of the position and oscillation speed, respectively. In this sense, the MPC
3 (together with the RD control) provides the best behavior, since it does not apply slack to the nominal limits on any occasion, then it is followed by MPC
1. This can be verified in
Figure 6 and
Figure 7, which show a comparison between the positions and oscillation speeds obtained by applying the designed controllers to the mathematical model (
15). As can be seen, all controllers keep the WEC system within its physical operating limits. Finally, the last two columns of
Table 5 show the maximum and minimum power peaks obtained when applying each controller. In this aspect, ignoring the resistive damping control, MPCs with embedded integrators are once again the best performers. Note that these power peaks will cause an oversizing of: electrical machines, power electronics, accumulators, etc.
With respect to the two optimization criteria compared in this paper, it can be concluded that the MPCs that employ an optimization criterion based on the minimization of the error between
w and
should only be used if they are designed from a model with an embedded integrator. Thus, this approach achieves better performance (in terms of diminution of instantaneous power peaks and reduction of mechanical fatigue due to exceeding nominal limits) than the standard optimization criteria based on maximizing the extracted power directly. On the other hand, with respect to the use of a complete model or a simplified model, it can be concluded that (in terms of instantaneous power generated and reduction of mechanical fatigue) the use of a complete model does not improve the performance of MPCs for this WEC significantly. This is because, the increase in the average power generated is minimal, and only in the case of the MPC
1 and MPC
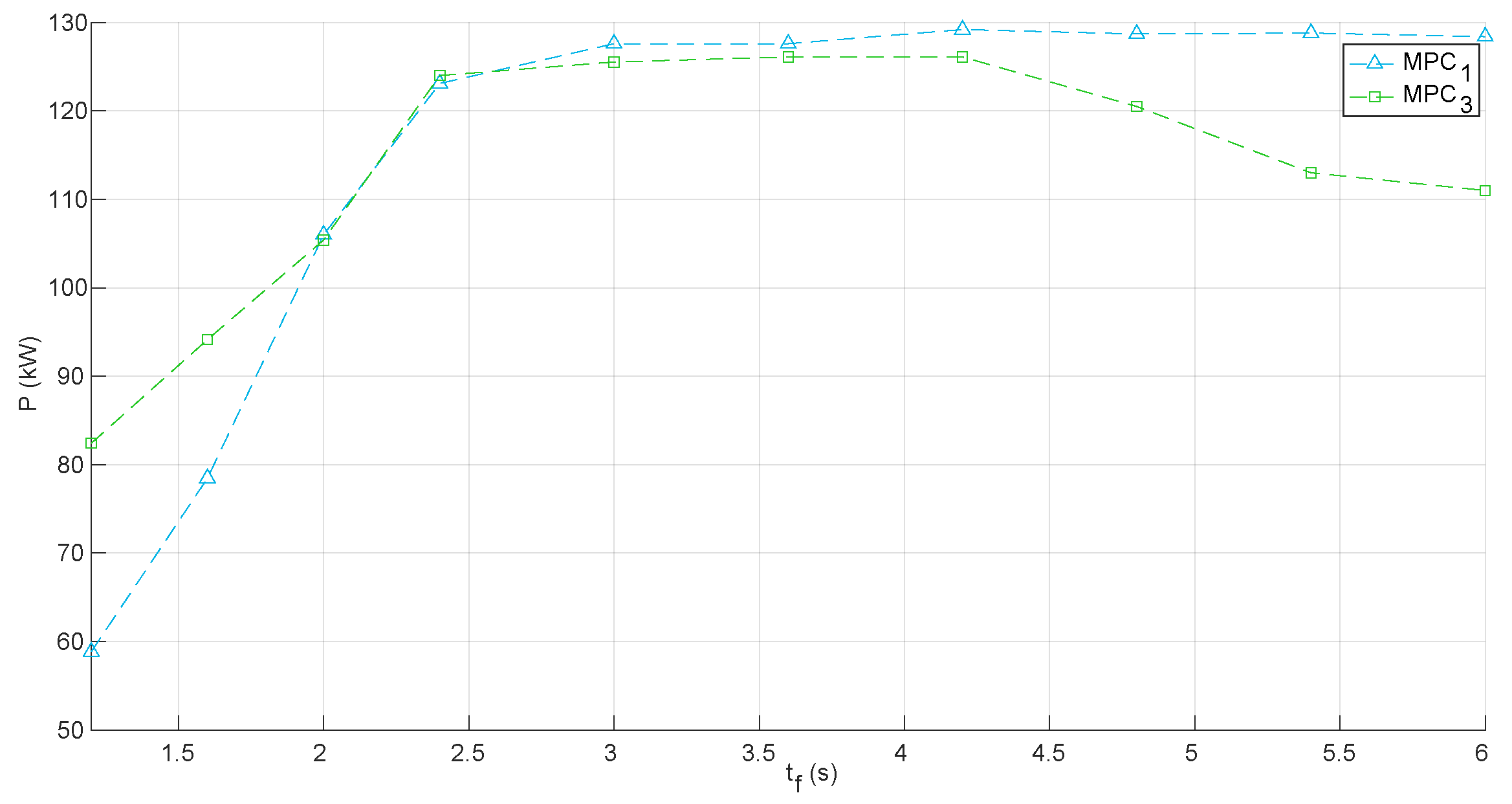
4, the use of a complete model reduces the overshoot of the PTO system a bit. Finally, the variation of the extracted mechanical power as a function of the prediction time
is studied. In particular,
Figure 8 shows a comparison between MPC
3 and MPC
1. As can be seen, in both cases, after a prediction time of 3 s, the power generation does not improve significantly, while the computation effort increases. In addition, it should be pointed that MPC
3 does not have a monotonously increasing behavior that relates
to the power generated, as would be expected. Nevertheless, in this aspect, the MPC
3 is better than the MPC
1, because it can generate more power with less information of the future excitation force (up to
s).
To conclude the performance study, by comparing the previous figures and the values recorded in
Table 5, it can be seen how the MPCs almost double the average power generated by the WEC system with respect to that obtained by tuning an adequate resistive damping for the PTO system (RD control). In addition, like the RD control, the MPC
3 keeps the system within its nominal operating limits. On the other hand, it is also verified that the MPCs are superior in performances than the conventional I-P controller, in terms of: average mechanical powers generated, diminution of instantaneous power peaks and reduction of mechanical fatigue (due to exceeding nominal limits).
4.2. Robustness Comparison
Another contribution of this work, searching for the greatest realism in the comparative of the designed controllers, is that uncertainty is added to the complete system model (
15) to the most significant identified parameters (
52): added mass and dynamics of the radiation force, which have been obtained through the openWEC software, and the hydrostatic restoring coefficient
(a nonlinear parameter that has been linearized during the modeling of the WEC system).
where Δ represents the added uncertainty in each parameter.
Note that when modifying the physical parameters of the WEC system, the frequency response of the filter (
9) is affected. Therefore, looking for a truthful comparison, it would be necessary to identify a new filter (
6) for each added uncertainty. Given the high number of simulations required, applying different levels of uncertainty to each of the parameters, this is not feasible. For this reason, in this work, the Morison model (
7) is used to define
, allowing one to modify the excitation force caused by the wave as a function of the added uncertainty more easily. Thus, when modifying the physical parameters of the system, the external force that the wave causes on the system also varies. Therefore, Equation (
7) is redefined for this analysis as:
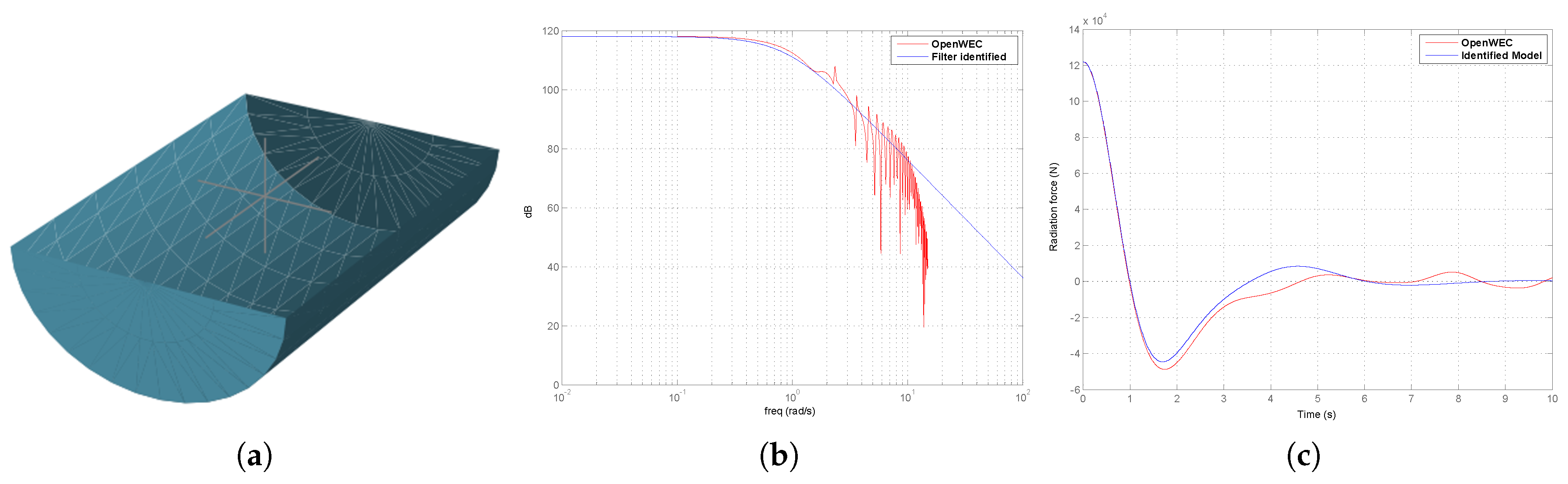
It should be noted that Equation (
53) uses a first and a second derivative of wave height. As a consequence, if the Morison model is used for the excitation force in a realistic sea state, it will amplify the high-frequency harmonics that are part of the wave. This is the opposite of the bandwidth of the WEC system provided by the openWEC software (see
Figure 2b). For this reason, in this part of the paper, the simulations are performed in an irregular sea state formed by the fifteen sinusoidal components listed in
Table 6.
In order to create an unfavorable test scenario for the MPCs, two factors have been adjusted. In the first place, the sea state recorded in
Table 6 is not favorable to the controllers, because the wave force becomes more than twice the stationary force that the PTO system can apply (recorded in
Table 3). Moreover, the prediction time
has been limited to a maximum of
s. After this, a fine-tuning has been made to all the MPCs looking for a balance between the generated power and the overshoot of the nominal limits of the WEC system. The result of this fine-tuning is listed in
Table 7.
Note that for the same wave height, the excitation force can increase or decrease according to the uncertainty added in each parameter. Therefore, there will be situations where, for the sea state defined in
Table 6, the controller cannot keep the system within its physical limits. This is because, the actuation force of the PTO system will be much lower than the excitation force. In this paper, this non-feasibility situation will be considered as the robustness limit that the controller can support. This limit is defined for the uncertainty added in each of the parameters (
52). This non-feasibility situation with soft constraints does not mean that the closed-loop system becomes unstable, but that the controller cannot keep the WEC system within the physical limits defined in
Table 3. Furthermore, in order to obtain a more complete analysis of how this uncertainty affects the closed-loop system, the average powers generated for each value of added uncertainty to each parameter are recorded. A large number of simulations has been carried out for this purpose; all of them have a duration of 120 s and use fourth order Runge–Kutta (RK4) integration method with an integration step of 1 ms.
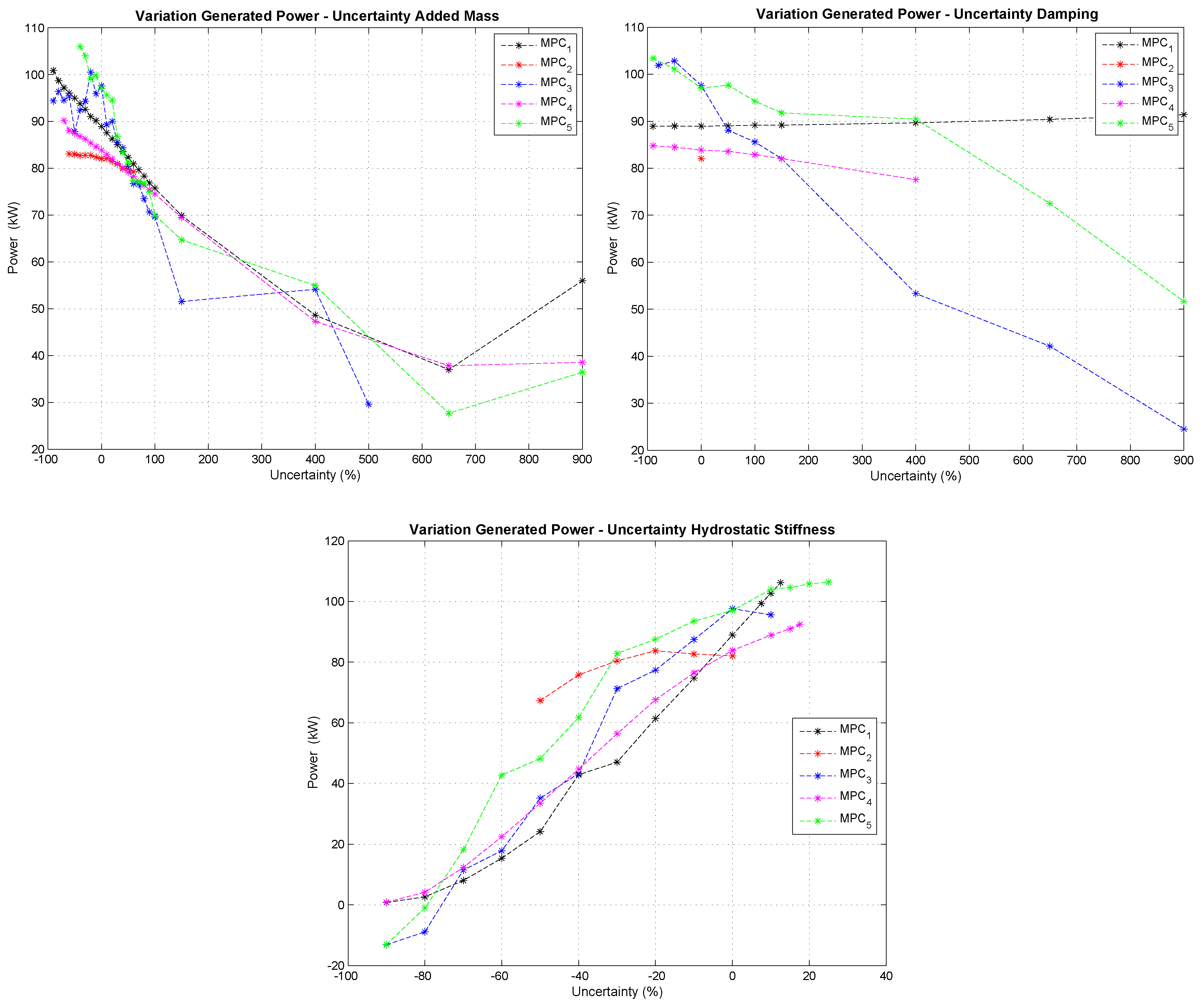
Once the robustness study has been defined,
Figure 9 shows the results obtained as a function of the added uncertainties; feasible limits obtained for the five MPCs and the variation of their mean power generated. With respect to the added uncertainty in
, the MPC
2 is the least robust. Meanwhile, the MPC
1 offers the best features in a power-robustness ratio. However, it should be noted that when considering more reasonable added uncertainty values (interval
), the MPC
5 extracts significantly more power than the others. It should also be noted that the controllers that directly maximize power in their cost function (MPC
1 and MPC
4) have the most predictable behavior with respect to the added uncertainty in
. On the other hand, the MPC
5 offers the best features with respect to the uncertainty added to the dynamics of the radiation force (up to
). In contrast, the MPC
2 gives very bad results in this respect. The MPC
1 also gets good results, because it achieves a practically constant power production despite variations of
.
Finally,
Figure 9 shows how the power generated by the different controllers varies according to the uncertainty added to the hydrostatic restoring coefficient of the system. In this aspect, it can be appreciated how the robustness of all the controllers is more limited. If the value of the coefficient
increases, the excitation force that the wave exerts on the system (
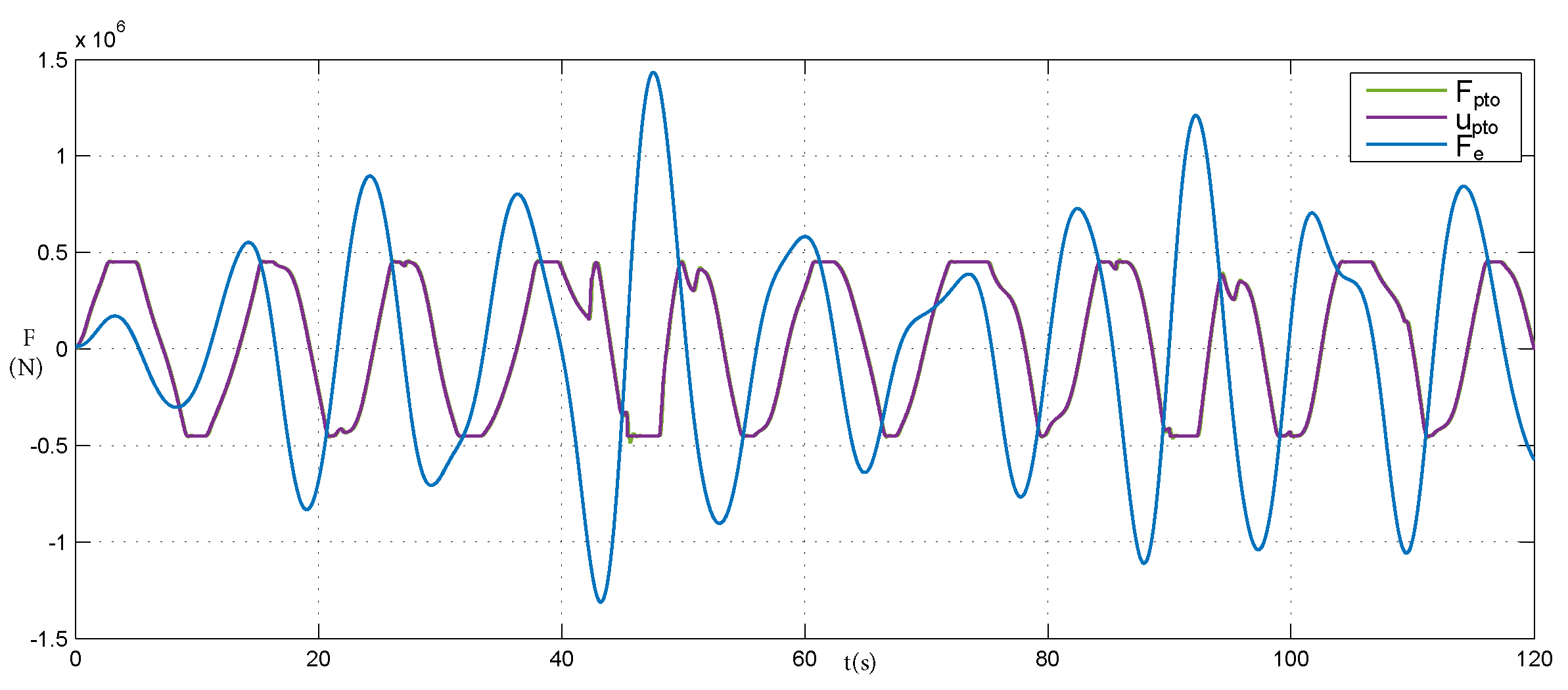
53) increases proportionally. Therefore, the margin of action of the PTO system decreases noticeably. Even so, the MPC
5 supports an added uncertainty of
, again being the one that provides the best robustness results even with the smallest prediction time
. Note that, for such added uncertainty, the excitation force becomes more than three-times the force that the PTO system can apply to the buoy; see
Figure 10. After the MPC
5, the MPC
4 and MPC
1 get the best results, in this order.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}