Islanding Detection of Synchronous Distributed Generator Based on the Active and Reactive Power Control Loops

 ,
,  , and
, and
Abstract
1. Introduction
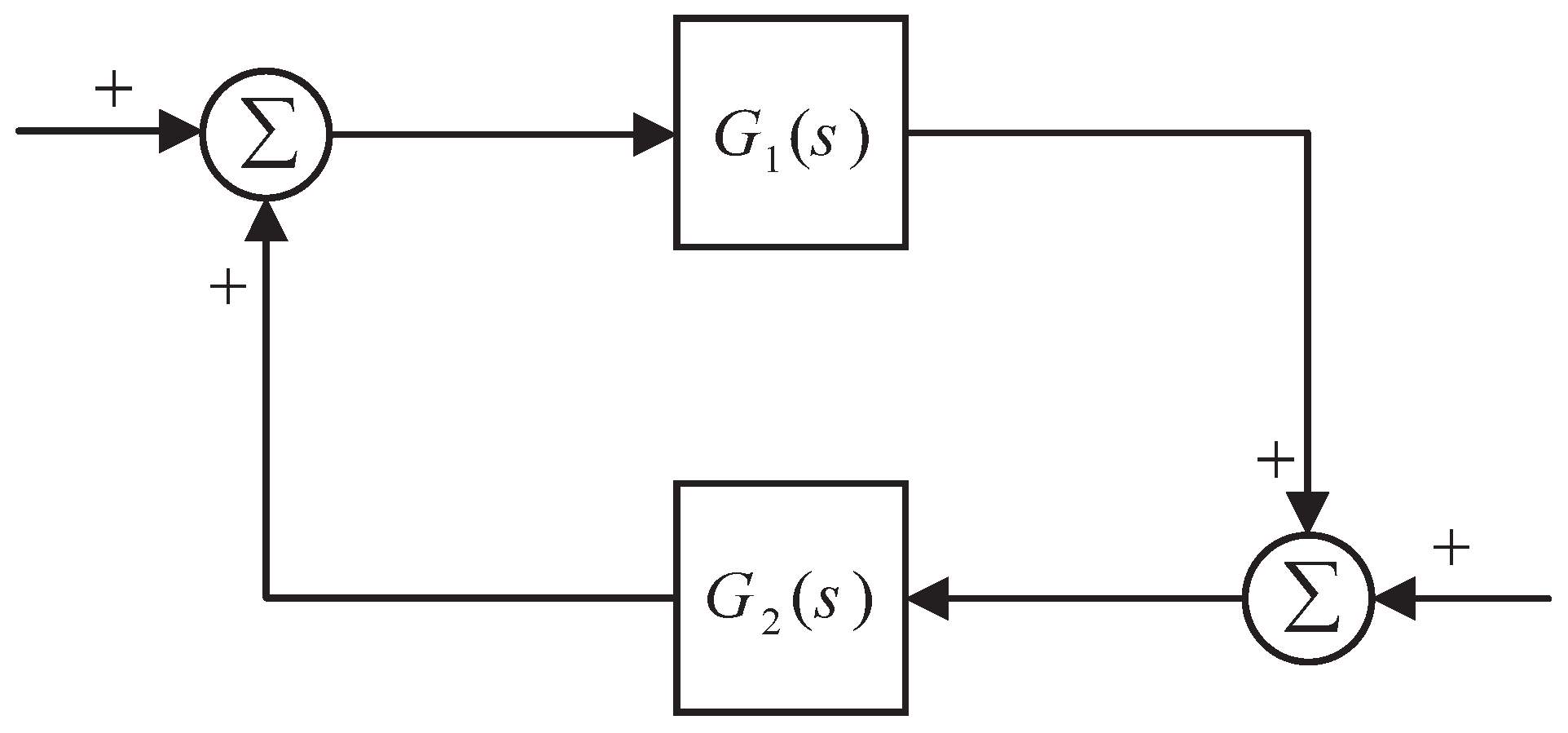
2. System Dynamic Model
3. Proposed Active Islanding Method
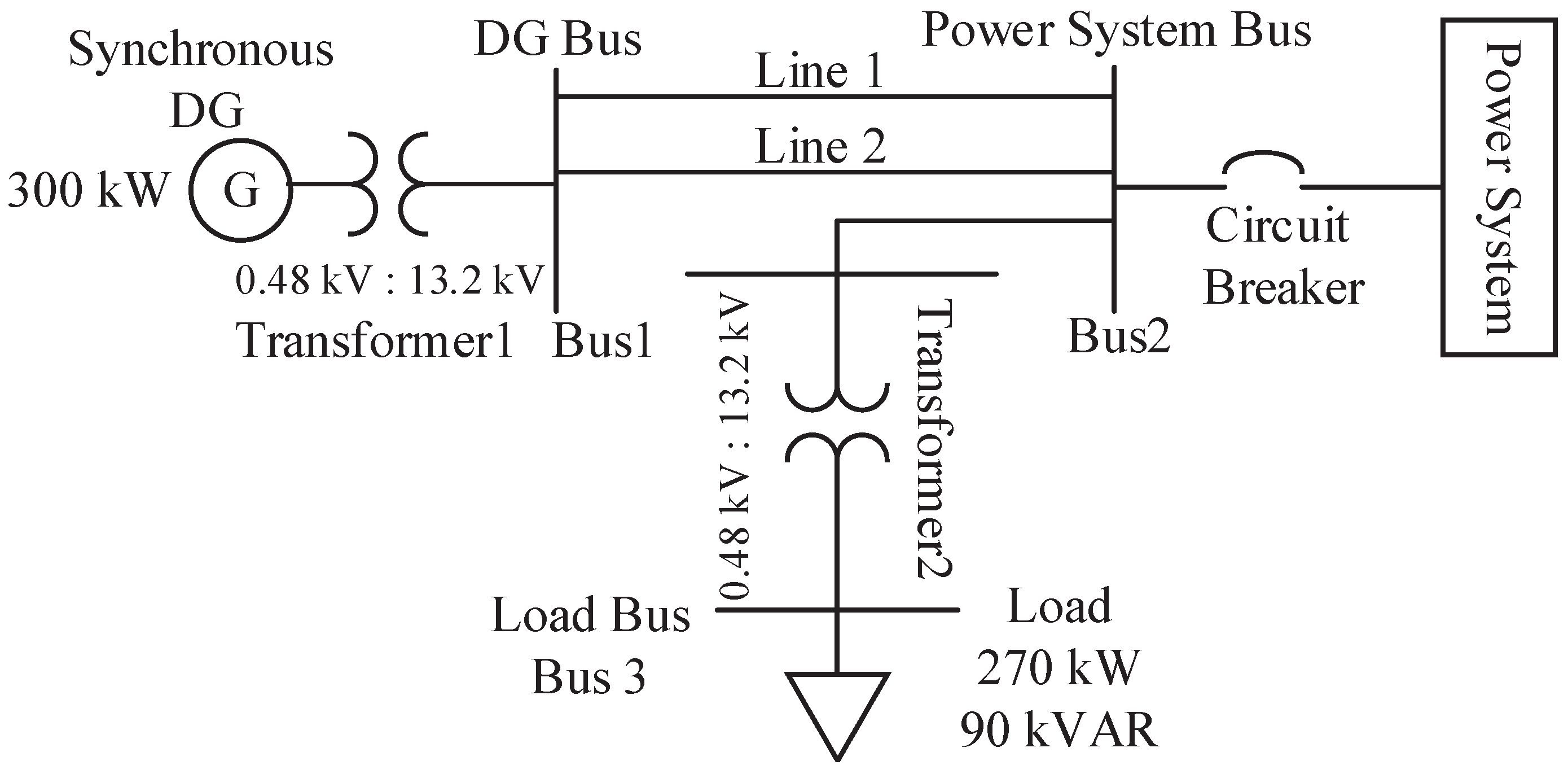
4. Design of the Proposed Scheme for the Test System
4.1. Design Procedure
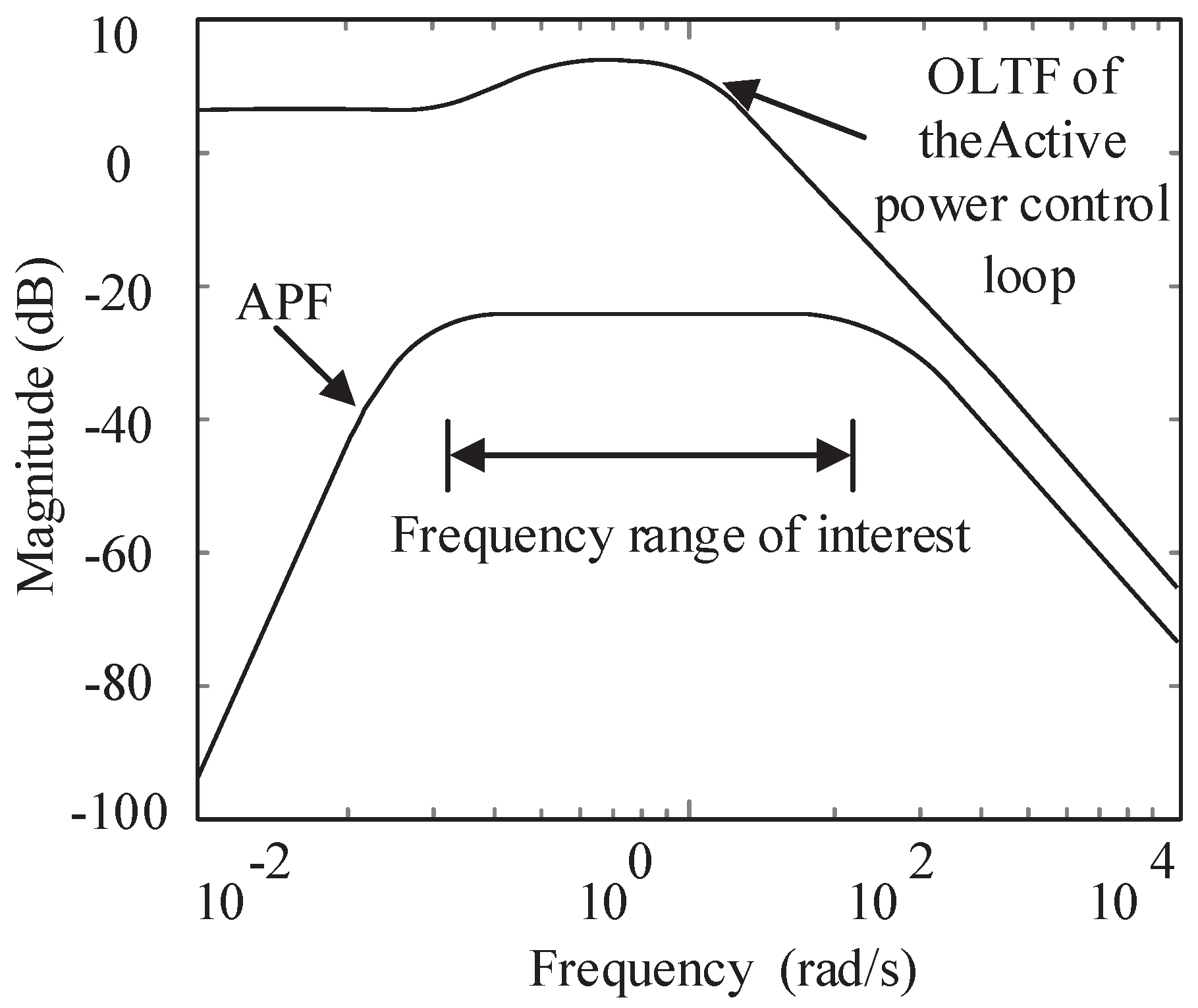
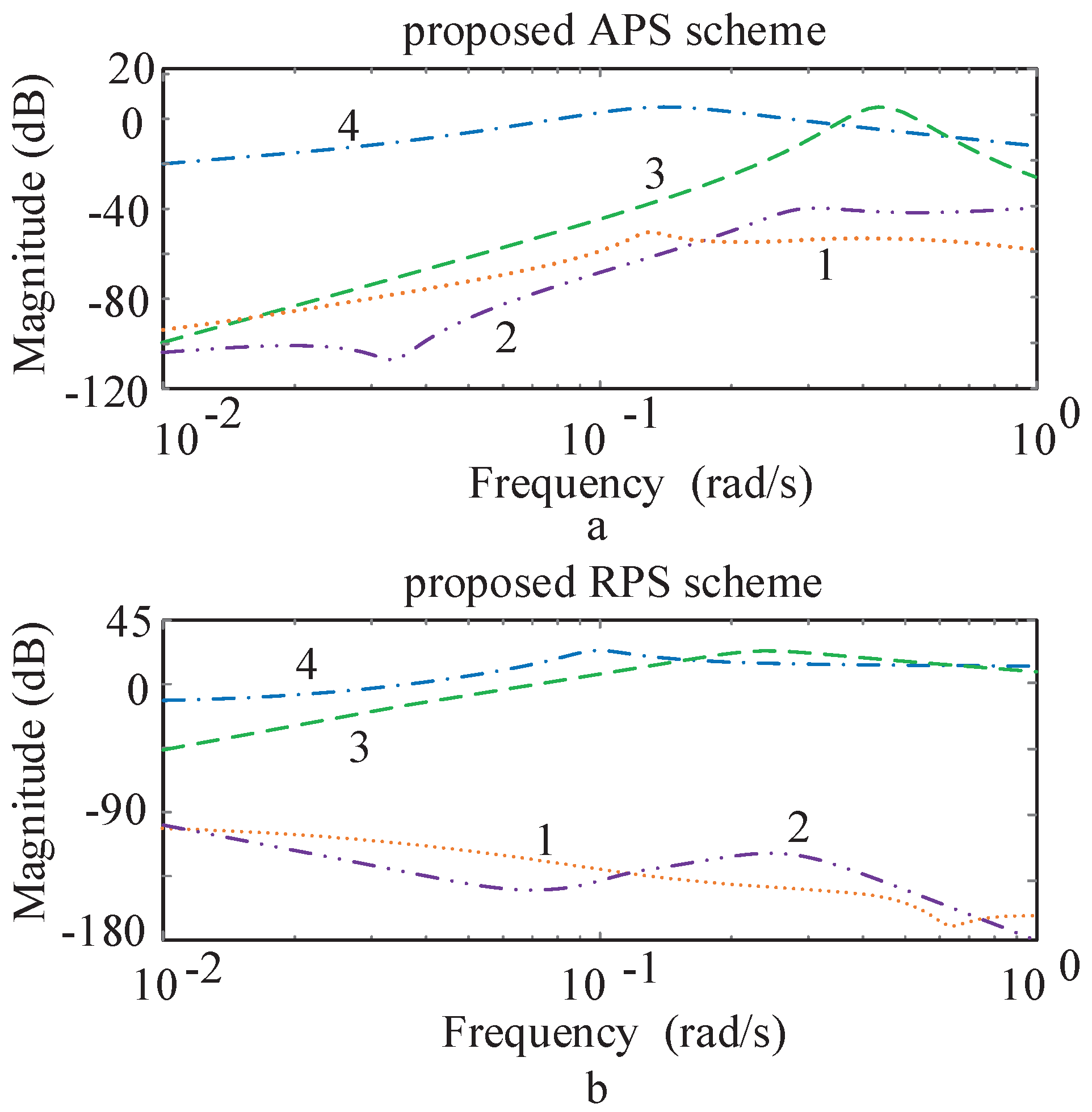
4.2. Frequency Domain Analysis
4.2.1. Islanding Situation
4.2.2. Grid-Connected Conditions
5. Simulation Results and Discussion
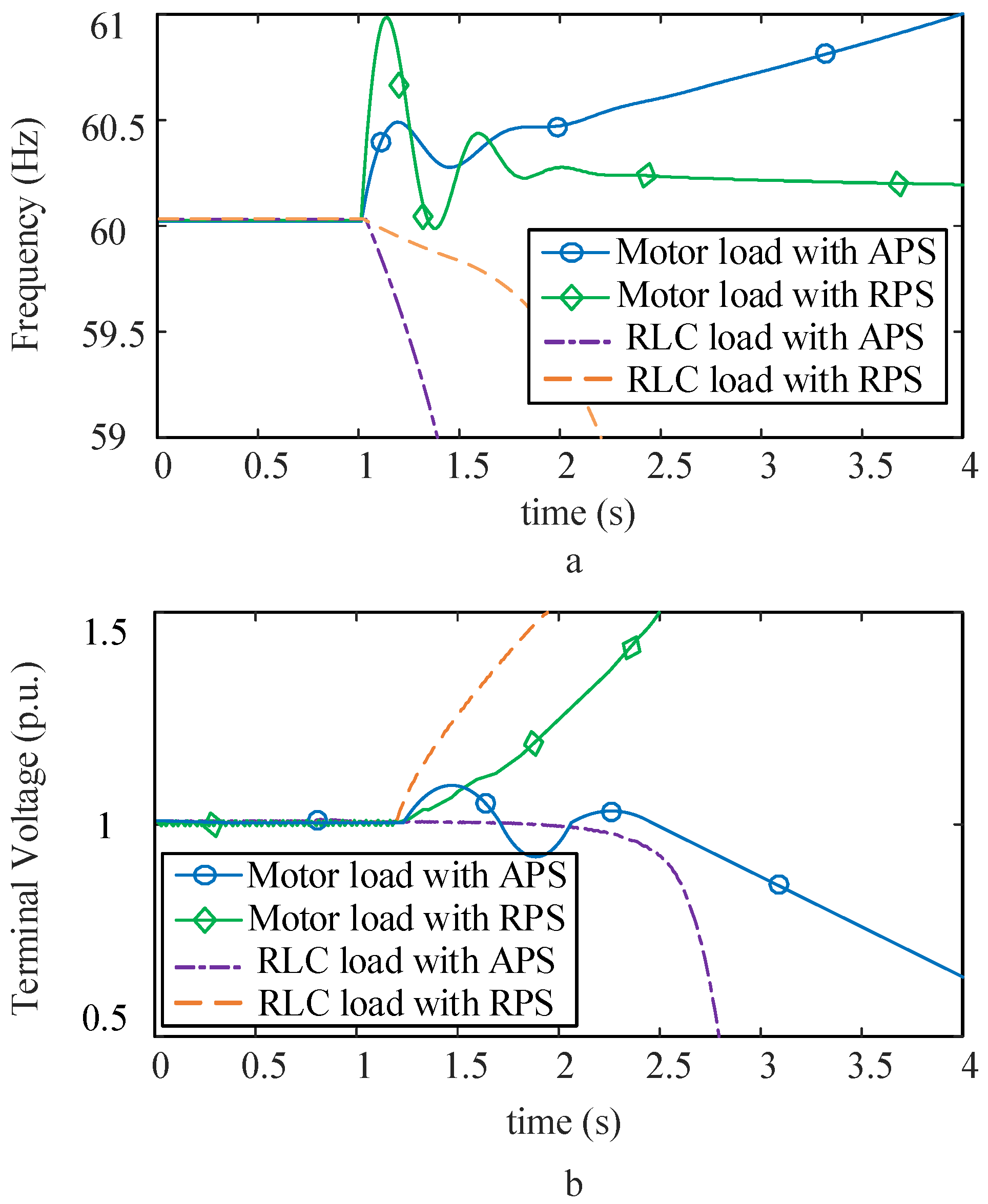
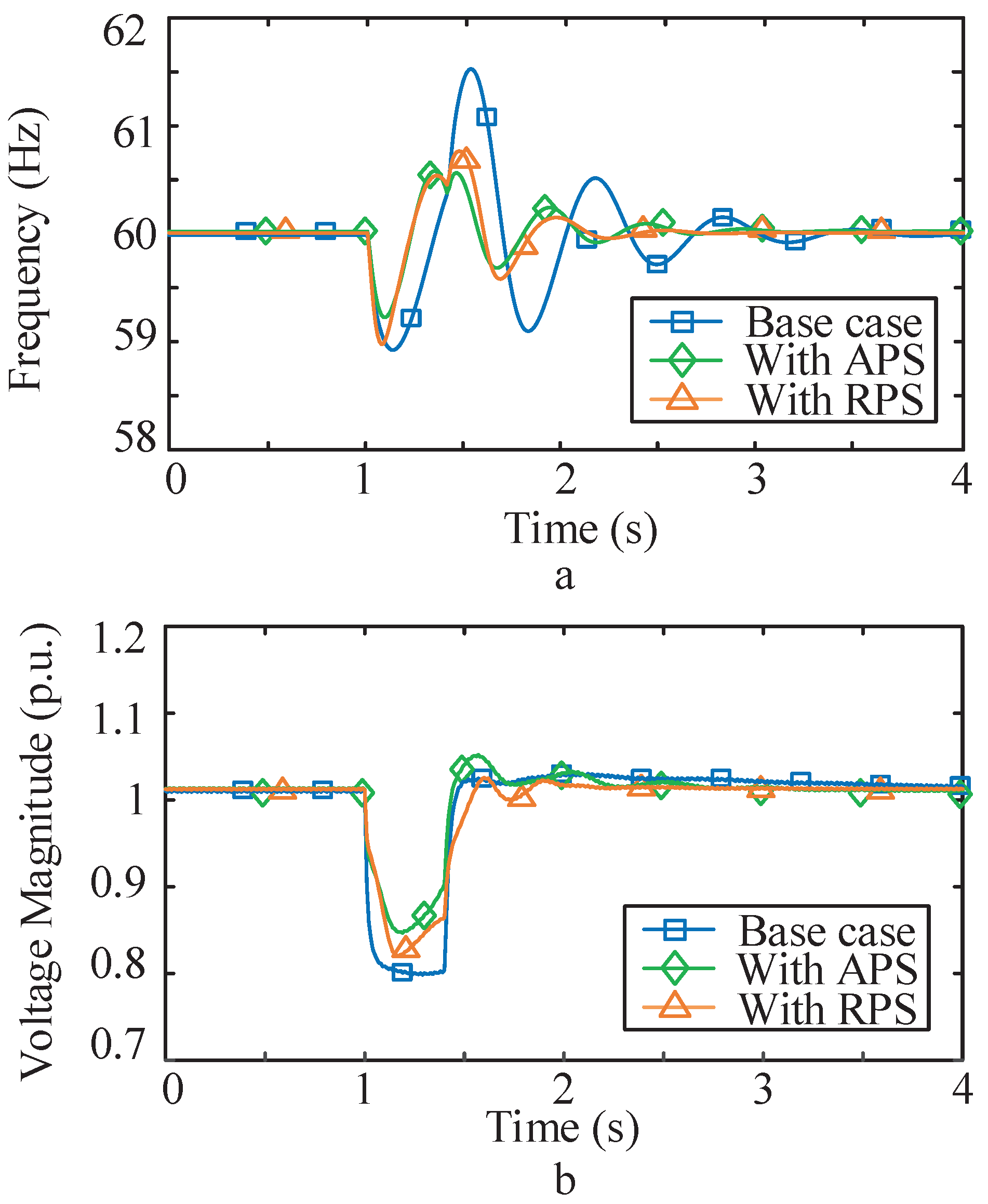
5.1. Islanding Situation
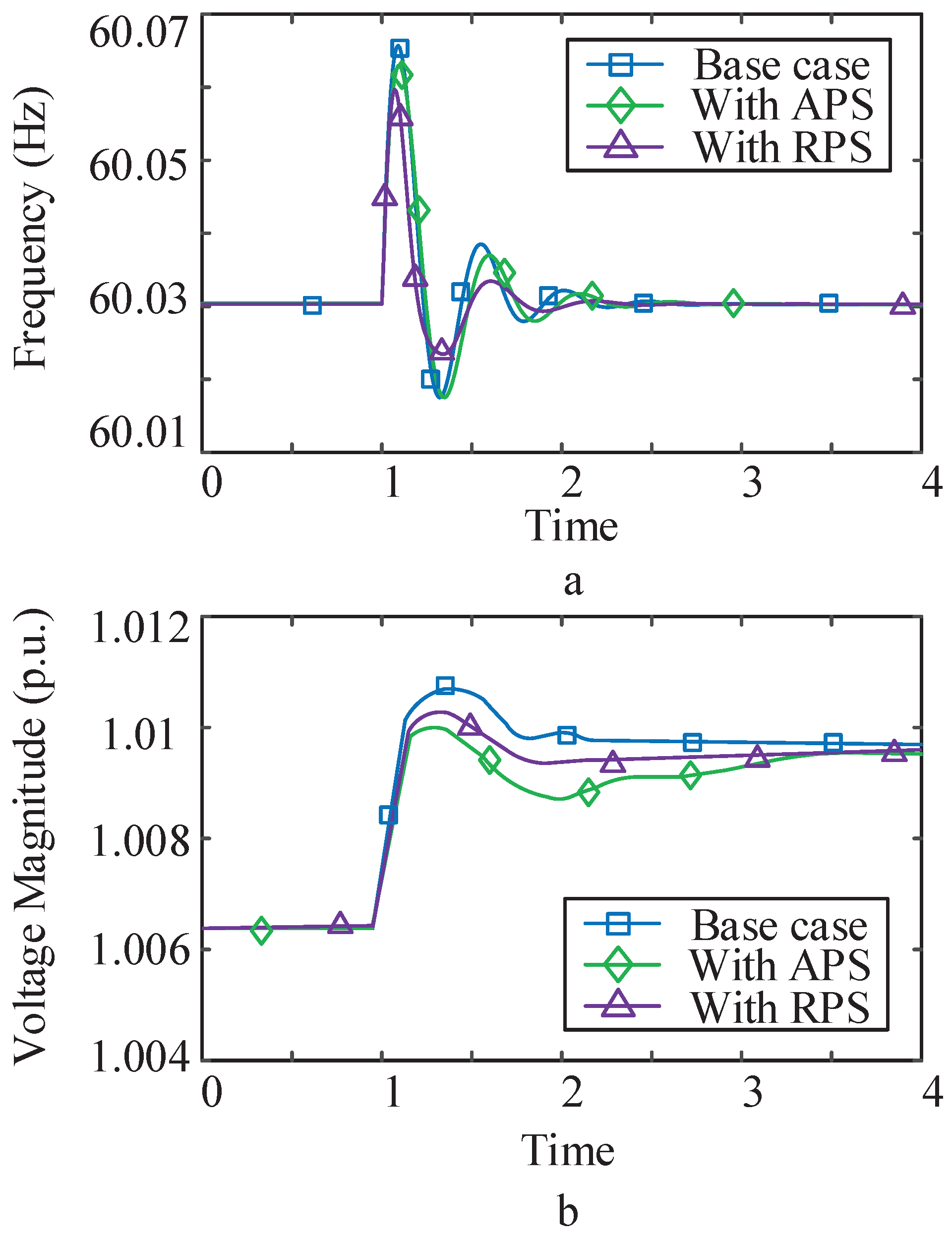
5.2. Grid-Connected Conditions
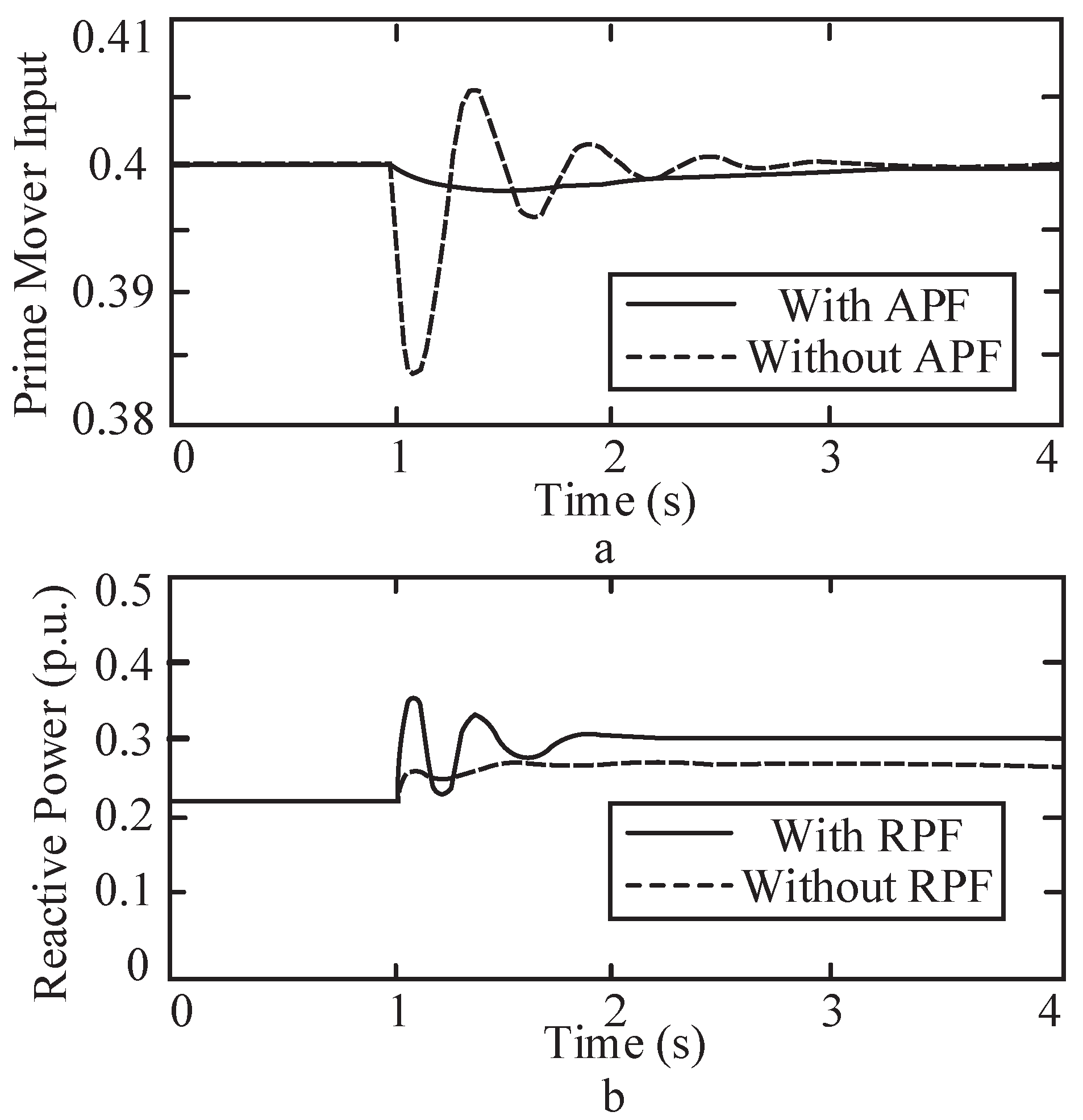
5.3. Ride-Through Capability Enhancement
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jenkins, N.; Ekanayake, J.; Strbac, G. Distributed Generation; Institution of Engineering and Technology: London, UK, 2010; ISBN 9780863419584. [Google Scholar]
- Alhelou, H.H.; Golshan, M.H.; Askari-Marnani, J. Robust sensor fault detection and isolation scheme for interconnected smart power systems in presence of RER and EVs using unknown input observer. Int. J. Electr. Power Energy Syst. 2018, 99, 682–694. [Google Scholar] [CrossRef]
- Alhelou, H.S.H.; Golshan, M.; Fini, M.H. Multi agent electric vehicle control based primary frequency support for future smart micro-grid. In Proceedings of the Smart Grid Conference (SGC), Tehran, Iran, 22–23 December 2015; pp. 22–27. [Google Scholar]
- Network Code for Requirements for Grid Connection Applicable to all Generators. Available online: https://www.google.com/search?q=19048-Requirements+for+Generators+Presentation.pdf&ie=utf-8&oe=utf-8 (accessed on 3 October 2018).
- Photovoltaics, D.G.; Storage, E. IEEE Guide for Conducting Distribution Impact Studies for Distributed Resource Interconnection. IEEE 2014. [Google Scholar] [CrossRef]
- Eshraghi, A.; Ghorbani, R. Islanding detection and over voltage mitigation using controllable loads. Sustain. Energy Grids Netw. 2016, 6, 125–135. [Google Scholar] [CrossRef]
- Gupta, P.; Bhatia, R.; Jain, D. Active ROCOF relay for islanding detection. IEEE Trans. Power Deliv. 2017, 32, 420–429. [Google Scholar] [CrossRef]
- Faqhruldin, O.N.; El-Saadany, E.F.; Zeineldin, H.H. A universal islanding detection technique for distributed generation using pattern recognition. IEEE Trans. Smart Grid 2014, 5, 1985–1992. [Google Scholar] [CrossRef]
- Zamani, R.; Golshan, M.E.H. Islanding detection of synchronous machine-based distributed generators using signal trajectory pattern recognition. In Proceedings of the IEEE 2018 6th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2018; pp. 91–95. [Google Scholar]
- Alshareef, S.; Talwar, S.; Morsi, W.G. A new approach based on wavelet design and machine learning for islanding detection of distributed generation. IEEE Trans. Smart Grid 2014, 5, 1575–1583. [Google Scholar] [CrossRef]
- Xing, J.; Mu, L. A New Passive Islanding Detection Solution Based on Accumulated Phase Angle Drift. Appl. Sci. 2018, 8, 1340. [Google Scholar] [CrossRef]
- Padhee, M.; Dash, P.K.; Krishnanand, K.; Rout, P.K. A fast Gauss-Newton algorithm for islanding detection in distributed generation. IEEE Trans. Smart Grid 2012, 3, 1181–1191. [Google Scholar] [CrossRef]
- Khamis, A.; Xu, Y.; Dong, Z.Y.; Zhang, R. Faster Detection of Microgrid Islanding Events using an Adaptive Ensemble Classifier. IEEE Trans. Smart Grid 2016, 9, 1889–1899. [Google Scholar] [CrossRef]
- Cui, Q.; El-Arroudi, K.; Joos, G. Islanding Detection of Hybrid Distributed Generation under Reduced Non-detection Zone. IEEE Trans. Smart Grid 2017, 9, 5027–5037. [Google Scholar] [CrossRef]
- Alam, M.R.; Muttaqi, K.M.; Bouzerdoum, A. A multifeature-based approach for islanding detection of DG in the subcritical region of vector surge relays. IEEE Trans. Power Deliv. 2014, 29, 2349–2358. [Google Scholar] [CrossRef]
- Voglitsis, D.; Papanikolaou, N.; Kyritsis, A.C. Incorporation of Harmonic Injection in an Interleaved Flyback Inverter for the Implementation of an Active Anti-Islanding Technique. IEEE Trans. Power Electron. 2017, 32, 8526–8543. [Google Scholar] [CrossRef]
- Liu, S.; Zhuang, S.; Xu, Q.; Xiao, J. Improved voltage shift islanding detection method for multi-inverter grid-connected photovoltaic systems. IET Gener. Trans. Distrib. 2016, 10, 3163–3169. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Shen, Z.; Mattavelli, P. Impedance-based analysis of active frequency drift islanding detection for grid-tied inverter system. IEEE Trans. Ind. Appl. 2016, 52, 332–341. [Google Scholar] [CrossRef]
- Lopes, L.A.; Sun, H. Performance assessment of active frequency drifting islanding detection methods. IEEE Trans. Energy Conver. 2006, 21, 171–180. [Google Scholar] [CrossRef]
- Kwak, R.; Lee, J.H.; Lee, K.B. Active Frequency Drift Method for Islanding Detection Applied to Micro-inverter with Uncontrollable Reactive Power. J. Power Electron. 2016, 16, 1918–1927. [Google Scholar] [CrossRef]
- Yafaoui, A.; Wu, B.; Kouro, S. Improved active frequency drift anti-islanding detection method for grid connected photovoltaic systems. IEEE Trans. Power Electron. 2012, 27, 2367–2375. [Google Scholar] [CrossRef]
- Zeineldin, H.; Kennedy, S. Sandia frequency-shift parameter selection to eliminate nondetection zones. IEEE Trans. Power Deliv. 2009, 24, 486–487. [Google Scholar] [CrossRef]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S.; Lin, X. Improved SMS islanding detection method for grid-connected converters. IET Renew. Power Gener. 2010, 4, 36–42. [Google Scholar] [CrossRef]
- Du, P.; Nelson, J.K.; Ye, Z. Active anti-islanding schemes for synchronous-machine-based distributed generators. IEE Proc.-Gener. Transm. Distrib. 2005, 152, 597–606. [Google Scholar] [CrossRef]
- Roscoe, A.J.; Burt, G.M.; Bright, C.G. Avoiding the non-detection zone of passive loss-of-mains (islanding) relays for synchronous generation by using low bandwidth control loops and controlled reactive power mismatches. IEEE Trans. Smart Grid 2014, 5, 602–611. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M. Hierarchical plug-in EV control based on primary frequency response in interconnected smart grid. In Proceedings of the 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 561–566. [Google Scholar]
- Mobarrez, M.; Ghanbari, N.; Bhattacharya, S. Control Hardware-in-the-Loop Demonstration of a Building-Scale DC Microgrid Utilizing Distributed Control Algorithm. In Proceedings of the IEEE PES General Meeting, Oregan, OR, USA, 5–9 August 2018. [Google Scholar]
- Alhelou, H.; Hamedani-Golshan, M.E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and Opportunities of Load Frequency Control in Conventional, Modern and Future Smart Power Systems: A Comprehensive Review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef]
- Fini, M.H.; Yousefi, G.R.; Alhelou, H.H. Comparative study on the performance of many-objective and single-objective optimisation algorithms in tuning load frequency controllers of multi-area power systems. IET Gener. Transm. Distrib. 2016, 10, 2915–2923. [Google Scholar] [CrossRef]
- Desoer, C.A.; Vidyasagar, M. Feedback Systems: Input-Output Properties; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1975. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Pearson Education Limited: London, UK, 2011. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Active Control Loop | Reactive Control Loop | ||||||
|---|---|---|---|---|---|---|---|---|
| , | , | , | , | Load condition | Gain margin | Phase margin | Gain margin | Phase margin |
| 0 | 0.02 | 0 | 0.02 | 2 | −15.7 dB | −12.2 dB | ||
| −0.5 | 0.02 | 0.5 | 0.02 | 2 | −20.9 dB | −12.4 dB | ||
| −5 | 0.02 | 0 | 0.02 | 2 | −31.5 dB | −18.2 dB | ||
| 0 | 0.02 | 0 | 0.02 | 1 | −6.24 dB | −12.2 dB | ||
| −5 | 0.02 | 0 | 0.02 | 3 | −21.1 dB | −18.2 dB | ||
| −0.5 | 0.02 | 0.5 | 0.02 | 4 | −8.53 dB | −12.4 dB | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zamani, R.; Hamedani-Golshan, M.-E.; Haes Alhelou, H.; Siano, P.; R. Pota, H. Islanding Detection of Synchronous Distributed Generator Based on the Active and Reactive Power Control Loops. Energies 2018, 11, 2819. https://doi.org/10.3390/en11102819
Zamani R, Hamedani-Golshan M-E, Haes Alhelou H, Siano P, R. Pota H. Islanding Detection of Synchronous Distributed Generator Based on the Active and Reactive Power Control Loops. Energies. 2018; 11(10):2819. https://doi.org/10.3390/en11102819
Chicago/Turabian StyleZamani, Reza, Mohamad-Esmail Hamedani-Golshan, Hassan Haes Alhelou, Pierluigi Siano, and Hemanshu R. Pota. 2018. "Islanding Detection of Synchronous Distributed Generator Based on the Active and Reactive Power Control Loops" Energies 11, no. 10: 2819. https://doi.org/10.3390/en11102819
APA StyleZamani, R., Hamedani-Golshan, M.-E., Haes Alhelou, H., Siano, P., & R. Pota, H. (2018). Islanding Detection of Synchronous Distributed Generator Based on the Active and Reactive Power Control Loops. Energies, 11(10), 2819. https://doi.org/10.3390/en11102819