PIDR Sliding Mode Current Control with Online Inductance Estimator for VSC-MVDC System Converter Stations under Unbalanced Grid Voltage Conditions


Abstract
1. Introduction
2. Mathematic Model of the Studied VSC-MVDC System
2.1. Schematic of the VSC-MVDC System Studied
2.2. Mathematical Model of the CS
2.3. Instantaneous Power Flow Analysis
2.4. Current Reference Calculation
2.4.1. Conventional Current Reference Calculation Method
2.4.2. The Proposed GCRC Method
3. PIDR-SMCC-OIE Controller Design
3.1. Dynamics of the Current Control Errors in the PS SRF
3.2. PIDR-SMCC Current Controller Design
3.3. Online Inductance Estimator Design
3.3.1. Inductance Parameter Estimation Model
3.3.2. The Gradient Algorithm
3.4. Block Diagram of the PIDR-SMCC-OIE Strategy
4. Simulation Study
4.1. General Configuration
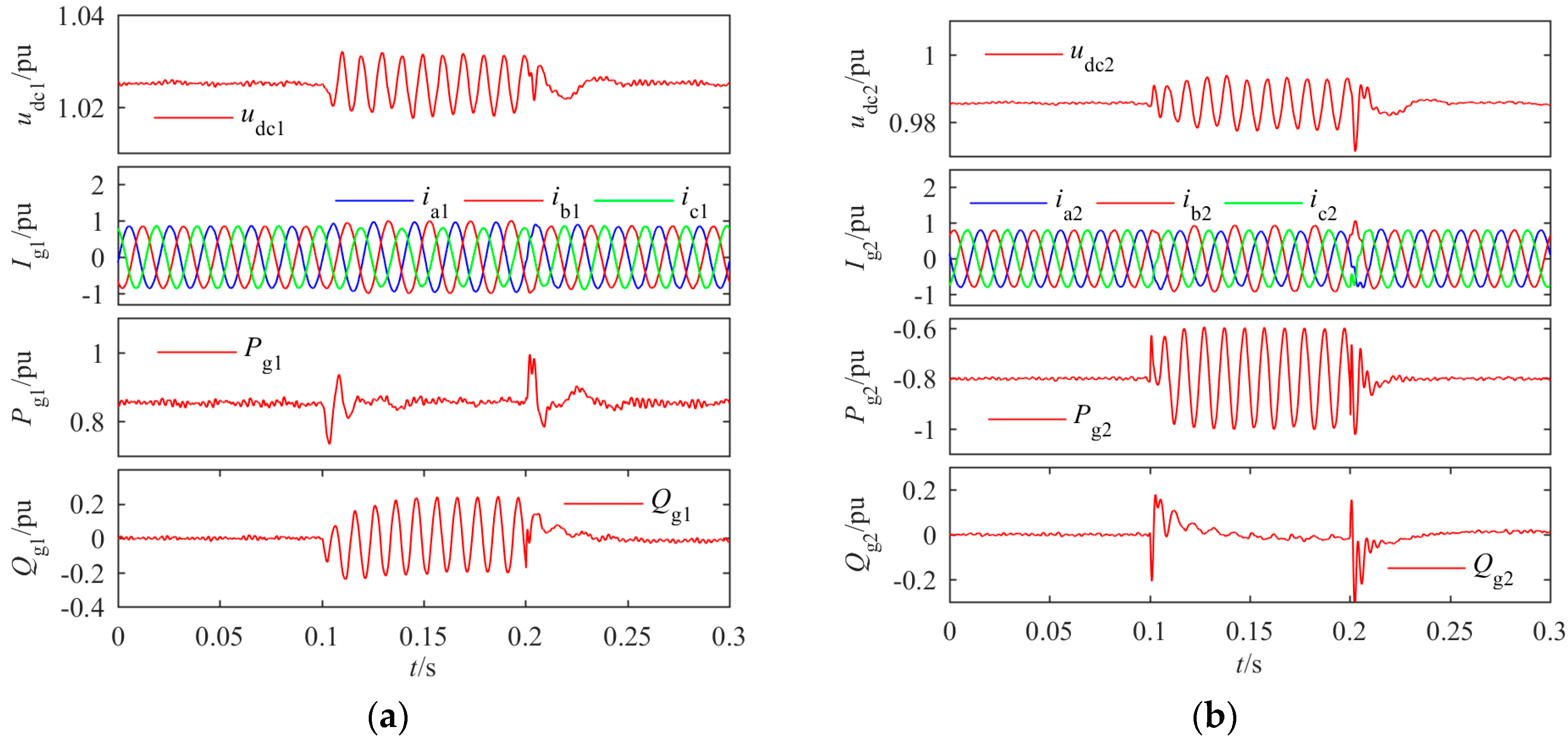
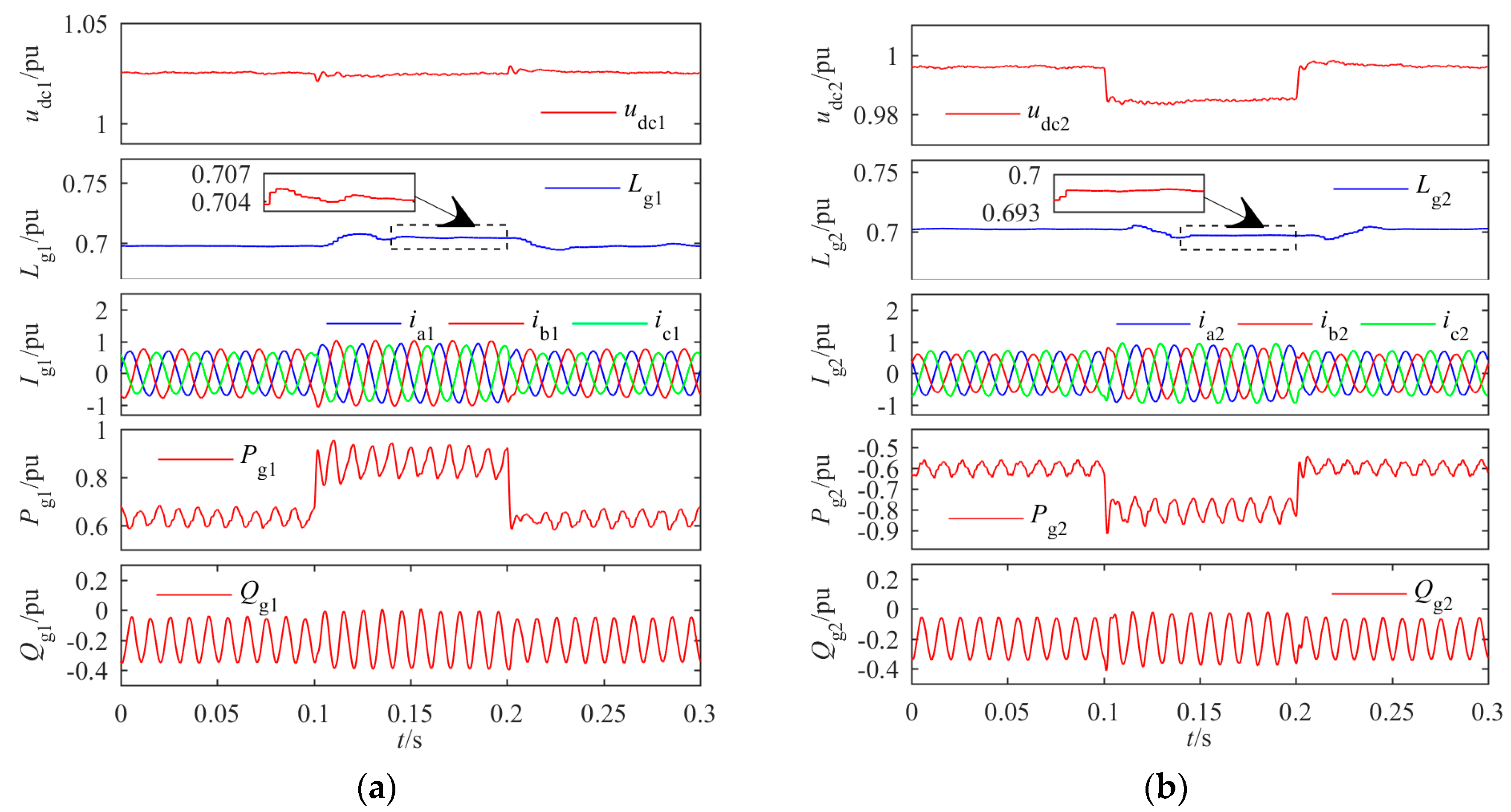
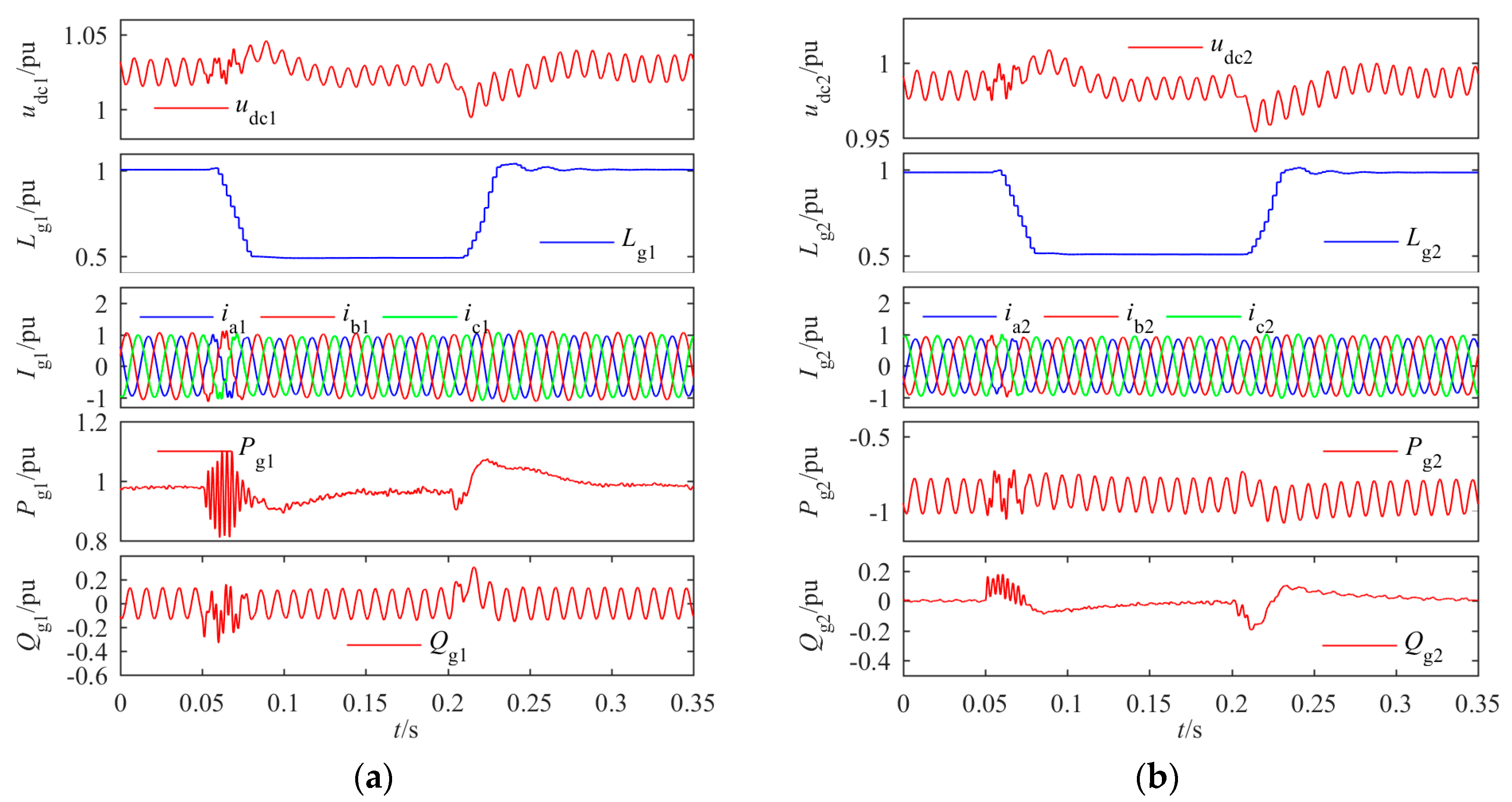
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Y.; Song, Q.; Zhao, B.; Li, J.; Sun, Q.; Liu, W. Quasi-square-wave modulation of modular multilevel high-frequency DC converter for medium-voltage DC distribution application. IEEE Trans. Power Electron. 2017, 33, 7480–7495. [Google Scholar] [CrossRef]
- Cairoli, P.; Dougal, R.A. Fault detection and isolation in medium-voltage DC microgrids: Coordination between supply power converters and bus contactors. IEEE Trans. Power Electron. 2018, 33, 4535–4546. [Google Scholar] [CrossRef]
- Zeng, Y.; Zou, G.; Wei, X.; Sun, C.; Jiang, L. A novel protection and location scheme for pole-to-pole fault in MMC-MVDC distribution grid. Energies 2018, 11, 2076. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, A.; Zhang, H.; Wang, J.; Li, G. Adaptive integral sliding mode direct power control for VSC-MVDC system converter stations. Int. Trans. Electr. Energy Syst. 2018, 28, e2516. [Google Scholar] [CrossRef]
- Che, Y.; Li, W.; Li, X.; Zhou, J.; Li, S.; Xi, X. An Improved coordinated control strategy for PV system integration with VSC-MVDC technology. Energies 2017, 10, 1670. [Google Scholar] [CrossRef]
- Sun, D.; Wang, X.; Nian, H.; Zhu, Z.Q. A sliding-mode direct power control strategy for DFIG under both balanced and unbalanced grid conditions using extended active power. IEEE Trans. Power Electron. 2018, 33, 1313–1322. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A. Fault analysis method considering dual-sequence current control of VSCs under unbalanced faults. Energies 2018, 11, 1660. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Solsona, J.A.; Gomez-Exposito, A. Adaptive control strategy for VSC-based systems under unbalanced network conditions. IEEE Trans. Smart Grid 2010, 1, 311–319. [Google Scholar] [CrossRef]
- Moharana, A.; Dash, P.K. Input-output linearization and robust sliding-mode controller for the VSC-HVDC transmission link. IEEE Trans. Power Deliv. 2010, 25, 1952–1961. [Google Scholar] [CrossRef]
- Song, H.-S.; Nam, K. Dual current control scheme for PWM converter under unbalanced input voltage conditions. IEEE Trans. Ind. Electron. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Hu, J.; He, Y.; Xu, L.; Williams, B.W. Improved control of DFIG systems during network unbalance using PI–R current regulators. IEEE Trans. Ind. Electron. 2009, 56, 439–451. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, C. Control strategy of MMC-HVDC under unbalanced grid voltage conditions. J. Power Electron. 2015, 6, 1499–1507. [Google Scholar] [CrossRef]
- Sun, L.X.; Chen, Y.; Wang, Z.; Ju, P. Optimal control strategy of voltage source converter-based high-voltage direct current under unbalanced grid voltage conditions. IET Gener. Transm. Distrib. 2016, 10, 444–451. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, A.; Zhang, H.; Ren, Z. Control strategy for modular multilevel converters with redundant sub-modules using energy reallocation. IEEE Trans. Power Deliv. 2017, 32, 1556–1564. [Google Scholar] [CrossRef]
- Nian, H.; Song, Y. DFIG operation control strategy under distorted grid conditions based on VPI current regulators. Proc. CSEE 2013, 33, 101–111. [Google Scholar]
- Liang, Y.; Liu, J.; Zhang, T.; Yang, Q. Arm current control strategy for MMC-HVDC under unbalanced conditions. IEEE Trans. Power Deliv. 2017, 32, 125–134. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef]
- Mehrasa, M.; Godina, R.; Pouresmaeil, E.; Vechiu, I.; Rodriguez, R.L.; Catalao, J.P.S. Synchronous Active Proportional Resonant-Based Control Technique for High Penetration of Distributed Generation Units into Power Grids. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, Torino, Italy, 26–29 September 2017. [Google Scholar]
- Jiang, W.; Ma, W.; Wang, J.; Wang, L.; Gao, Y. Deadbeat control based on current predictive calibration for grid-connected converter under unbalanced grid voltage. IEEE Trans. Ind. Electron. 2017, 64, 5479–5491. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Jiang, W.; Ding, X.; Ni, Y.; Wang, J.; Wang, L.; Ma, W. An improved deadbeat control for a three-phase three-line active power filter with current-tracking error compensation. IEEE Trans. Power Electron. 2018, 33, 2061–2072. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of finite-control-set model predictive current control with model parameter mismatch in a three-phase inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Mehrasa, M.; Adabi, M.E.; Pouresmaeil, E.; Adabi, J.; Bo, N.J. Direct Lyapunov control (DLC) technique for distributed generation (DG) technology. Electr. Eng. 2014, 96, 309–321. [Google Scholar] [CrossRef]
- Kordkheili, H.H.; Banejad, M.; Kalat, A.A.; Pouresmaeil, E.; Catalão, J.P.S.; Sciubba, E. Direct-Lyapunov-based control scheme for voltage regulation in a three-phase islanded microgrid with renewable energy sources. Energies 2018, 11, 1161. [Google Scholar] [CrossRef]
- Pahlevaninezhad, M.; Das, P.; Drobnik, J.; Jain, P.K.; Bakhshai, A. A new control approach based on the differential flatness theory for an ac/dc converter used in electric vehicles. IEEE Trans. Power Electron. 2012, 27, 2085–2103. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Taheri, S.; Vechiu, I.; Catalão, J.P.S. Novel control strategy for modular multilevel converters based on differential flatness theory. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 888–897. [Google Scholar] [CrossRef]
- Fan, X.; Guan, L.; Xia, C.; Ji, T. IDA-PB control design for VSC-HVDC transmission based on PCHD model. Int. Trans. Electr. Energy Syst. 2015, 25, 2133–2143. [Google Scholar] [CrossRef]
- Mehrasa, M.; Rezanejhad, M.; Pouresmaeil, E.; Catalão, J.P.S.; Zabihi, S. Analysis and Control of Single-Phase Converters for Integration of Small-Scaled Renewable Energy Sources into the Power Grid. In Proceedings of the 7th Power Electronics, Drive Systems & Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016. [Google Scholar]
- Shang, L.; Hu, J. Sliding-mode-based direct power control of grid-connected wind-turbine- driven doubly fed induction generators under unbalanced grid voltage conditions. IEEE Trans. Energy Convers. 2012, 27, 362–373. [Google Scholar] [CrossRef]
- Gong, H.; Wang, Y.; Li, Y.; Li, X.; Wei, L. An input-output feedback linearized sliding mode control for D-STATCOM. Autom. Electr. Power Syst. 2016, 40, 102–108. [Google Scholar]
- Yang, W.; Zhang, A.; Li, J.; Li, G.; Zhang, H.; Wang, J. Integral plus resonant sliding mode direct power control for VSC-HVDC systems under unbalanced grid voltage conditions. Energies 2017, 10, 1528. [Google Scholar] [CrossRef]
- Mehrasa, M.; Hosseini, S.K.; Taheri, S.; Pouresmaeil, E.; Catalão, J.P.S. Dynamic Performance Control of Modular Multilevel Converters in HVDC Transmission Systems. In Proceedings of the IEEE Electrical Power and Energy Conference, Ottawa, ON, Canada, 12–14 October 2016. [Google Scholar]
- Mahdian-Dehkordi, N.; Namvar, M.; Karimi, H.; Piya, P.; Karimi-Ghartemani, M. Nonlinear adaptive control of grid-connected three-phase inverters for renewable energy applications. Int. J. Control 2017, 90, 53–67. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Inform. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Chen, C.; Li, L.; Zhang, Q.; Tong, Q.; Liu, K.; Lyu, D.; Min, R. Online inductor parameters identification by small-signal injection for sensorless predictive current controlled boost converter. IEEE Trans. Ind. Inform. 2017, 13, 1554–1564. [Google Scholar] [CrossRef]
- Kabiri, R.; Holmes, D.G.; McGrath, B.P. Control of active and reactive power ripple to mitigate unbalanced grid voltages. IEEE Trans. Ind. Appl. 2016, 52, 1660–1668. [Google Scholar] [CrossRef]
- Wang, Y.; Ou, M.; Chen, Y.; Chen, Z.; Xiao, Z.; Xu, Z.; Wang, Y. Coordinate control of power fluctuation suppression and current balance under unbalanced voltage conditions. Proc. CSEE 2017, 37, 6981–6987. [Google Scholar]
- Anderson, B. Exponential stability of linear equations arising in adaptive identification. IEEE Trans. Autom. Control 1977, 22, 83–88. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; China Machine Press: Beijing, China, 2006; pp. 365–366. ISBN 7-111-18379-7. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| KPId, KPIq | 20 |
| KSd, KSq | 1500 |
| KRd, KRq | 7 |
| ωc | 10 |
| γ1 | 5000 |
| γ2 | 2500 |
| Symbol | Meaning |
|---|---|
| udc1, udc2 | DC bus voltage of CS1 and CS2 |
| Eg1, Eg2 | Three-phase grid voltage on CS1 and CS2 side |
| Ig1, Ig2 | Three-phase AC current on CS1 and CS2 side |
| Pg1, Qg1, Pg2, Qg2 | Active and reactive power exchange at the PCC of CS1 and CS2 |
| Lg1, Lg2 | The estimated inductance for CS1 and CS2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Zhang, H.; Li, J.; Zhang, A.; Zhou, Y.; Wang, J. PIDR Sliding Mode Current Control with Online Inductance Estimator for VSC-MVDC System Converter Stations under Unbalanced Grid Voltage Conditions. Energies 2018, 11, 2599. https://doi.org/10.3390/en11102599
Yang W, Zhang H, Li J, Zhang A, Zhou Y, Wang J. PIDR Sliding Mode Current Control with Online Inductance Estimator for VSC-MVDC System Converter Stations under Unbalanced Grid Voltage Conditions. Energies. 2018; 11(10):2599. https://doi.org/10.3390/en11102599
Chicago/Turabian StyleYang, Weipeng, Hang Zhang, Jungang Li, Aimin Zhang, Yunhong Zhou, and Jianhua Wang. 2018. "PIDR Sliding Mode Current Control with Online Inductance Estimator for VSC-MVDC System Converter Stations under Unbalanced Grid Voltage Conditions" Energies 11, no. 10: 2599. https://doi.org/10.3390/en11102599
APA StyleYang, W., Zhang, H., Li, J., Zhang, A., Zhou, Y., & Wang, J. (2018). PIDR Sliding Mode Current Control with Online Inductance Estimator for VSC-MVDC System Converter Stations under Unbalanced Grid Voltage Conditions. Energies, 11(10), 2599. https://doi.org/10.3390/en11102599